Изобретение относится к комплексному контролю датчиков пилотажной информации летательного аппарате (ЛА), в том числе построителю вертикали (авиагоризонта, гировертикали), включающему измеритель датчики тангажа, крена и указатель, и датчикам угловых скоростей по осям связанной системы координат. Предпочтительно оно может быть использовано для контроля датчиков систем автоматического управления (САУ) легких, маневренных, отказобезопасных ЛА, не содержащих избыточного приборного оборудования по соображениям ограничения стоимости, веса и габаритов.
Известен способ контроля гироскопических приборов ЛА по соответствию питающих напряжений, подводимых к построителю вертикали и датчикам угловых скоростей, их номинальным значениям [1, с. 26, 42] Контроль реализуется в различных устройствах с помощью пороговых элементов, реле или электродвигателя с возвратной пружиной, включенных в цепи питания проверяемого датчика. Сигнал отказа выдается при нарушении питания приборов в случае падения напряжения ниже допустимого, обрыва в сети постоянного тока или одной из фаз переменного тока. Устройство является простым в реализации, надежным, имеет малый вес, стоимость, габариты, но оно не может обнаружить отказы сигнальных, коррекционных цепей датчиков и, что самое главное, осуществляет косвенный контроль, не учитывающий достоверность выходных сигналов приборов.
Известны устройства контроля построителей вертикали и датчиков угловых скоростей по осям связанной системы координат, содержащие кворум-элементы [1, с. 38] Устройства предназначены для контроля трех однотипных построителей вертикали или трех датчиков угловых скоростей по соответствующей оси связанной системы координат. Они содержат мажоритарные схемы и компараторы, в которых происходит сравнение выходных сигналов каждого датчика с осредненным сигналом всех трех датчиков. Достоверность контроля построителя вертикали этим устройством типа БКК сравнительно высока и для варианта подключения, принятого на самолете ИЛ-86 [2, с. 158; 3] составляет P
Известно устройство для комплексного контроля датчиков пилотажной информации [4] в том числе построителя вертикали и датчика угловой скорости. Устройство содержит первый, второй умножители, компаратор и сумматор на три входа, первый вход которого соединен с выходом первого умножителя, входы которого соединены с выходом датчика скорости ЛА и соответствующим датчиком угловой скорости, второй вход с выходом второго умножителя, входы которого соединены с датчиками крена и тангажа построителя, третий вход с выходом соответствующего датчика перегрузки, а выход с входом компаратора. Устройство контроля сравнивает вычисленные по показаниям построителя вертикали, датчика угловой скорости и датчика скорости ЛА оценки перегрузки по оси связанной системы координат с их измеренными значениями, полученными с датчика перегрузки. При отказе построителя, датчика угловой скорости, датчика перегрузки или датчика скорости равенство вычисленной и измеренной перегрузок нарушается, что приводит к срабатыванию компаратора. Устройство способно контролировать датчики легкого, маневренного ЛА без установки на борт избыточных приборов. Однако, достоверность контроля построителя вертикали и датчика угловой скорости здесь сравнительно невелика P
Наиболее близким по технической сущности к заявляемому изобретению является устройство для комплексного контроля [5, с. 270-271] проверяющее построитель вертикали и два датчика угловых скоростей по поперечной и продольной осям связанной системы координат. Устройство контроля содержит два дифференциатора и два компаратора. При этом выход датчика угла тангажа построителя вертикали через первый дифференциатор соединен с одним из входов первого компаратора, другой вход которого соединен с выходом датчика угловой скорости по поперечной оси связанной системы координат. Выход датчика угла крена этого же построителя вертикали аналогично через второй дифференциатор соединен с одним из входов второго компаратора, другой вход которого соединен с выходом датчика угловой скорости по продольной оси связанной системы координат. Работа устройства включает сравнение продифференцированного выходного сигнала построителя вертикали, пропорционального угловой скорости  тангажа ЛА, с выходным сигналом wz датчика угловой скорости по поперечной оси связанной системы координат в первом компараторе, а также сравнение продифференцированного выходного сигнала построителя вертикали, пропорционального угловой скорости
тангажа ЛА, с выходным сигналом wz датчика угловой скорости по поперечной оси связанной системы координат в первом компараторе, а также сравнение продифференцированного выходного сигнала построителя вертикали, пропорционального угловой скорости  крена ЛА с выходным сигналом wx датчика угловой скорости по продольной оси связанной системы координат во втором компараторе. При отказе построителя или датчика угловой скорости равенство сигналов на входах компараторов нарушается, что приводит к их срабатыванию и сигнализации отказа.
крена ЛА с выходным сигналом wx датчика угловой скорости по продольной оси связанной системы координат во втором компараторе. При отказе построителя или датчика угловой скорости равенство сигналов на входах компараторов нарушается, что приводит к их срабатыванию и сигнализации отказа.
Отсутствие избыточных датчиков, необходимых для обнаружения отказа, сделало целесообразным применение этого устройства в САУ легких ЛА. Оно использует информацию датчиков уже имеющихся на борту и входящих в состав штатного приборного оборудования. Следовательно, устройство контроля, принятое за прототип, является наименьшим по весу, стоимости и габаритам, что очень важно для легких ЛА. Достоверность контроля построителя вертикали и датчиков угловых скоростей этим устройством весьма велика P
В общем же случае сложного пространственного движения, характерном для легкого, маневренного ЛА приближенное соотношение (1), лежащее в основе работы устройства контроля прототипа, не выполняется, так как имеют место следующие точные кинематические соотношения, связывающие производные углов крена  тангажа
тангажа  рыскания
рыскания  ЛА и проекции wx, ωy, ωz вектора угловой скорости на связанные оси [6, с. 22]
ЛА и проекции wx, ωy, ωz вектора угловой скорости на связанные оси [6, с. 22]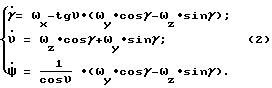
Это указывает на невозможность достоверного контроля устройством - прототипом датчиков при υ ≠ 0 γ ≠ 0 Кроме того, соотношения (2) имеют особенность при υ → 90° что делает невозможным использование сигналов  для контроля на высокоманевренном ЛА.
для контроля на высокоманевренном ЛА.
Техническая задача, решаемая изобретением, состоит в повышении эффективности обнаружения отказов построителя вертикали и датчиков угловых скоростей по осям связанной системы координат на легком, маневренном ЛА при произвольных углах крена, тангажа, курса последнего и отсутствии избыточных измерителей одноименных параметров, минимальных габаритах, весе и стоимости устройства.
Решение технической задачи достигается тем, что в устройство для контроля построителя вертикали и датчиков угловых скоростей по осям связанной системы координат ЛА, содержащей первый и второй дифференциаторы, первый и второй компараторы, введены последовательно соединенные первый дифференциатор, вход которого соединен с выходом синуса угла тангажа построителя, первый сумматор и первый компаратор, первый умножитель, первый вход которого соединен с выходом косинуса угла крена построителя, а второй вход с выходом косинуса угла тангажа построителя, второй умножитель, первый вход которого соединен с выходом первого умножителя, второй вход с выходом датчика угловой скорости по поперечной оси, а выход с первым вычитающим входом первого сумматора, третий умножитель, первый вход которого соединен с выходом датчика угловой скорости по нормальной оси, а выход со вторым вычитающим входом первого сумматора, четвертый умножитель, первый вход которого соединен с выходом косинуса угла тангажа построителя, второй вход с выходом синуса угла крена построителя, а выход со вторым входом третьего умножителя, пятый умножитель, первый вход которого соединен с выходом датчика угловых скоростей по нормальной оси, а второй вход с выходом синуса угла тангажа построителя, шестой умножитель, первый вход которого соединен с выходом датчика угловых скоростей по продольной оси, а второй вход с выходом первого умножителя, последовательно соединенные второй дифференциатор, вход которого соединен с выходом четвертого умножителя, второй сумматор, второй вычитающий вход которого соединен с выходом шестого умножителя, а первый суммирующий вход с выходом шестого умножителя, и второй компаратор, седьмой умножитель, первый вход которого соединен с выходом датчика угловой скорости по поперечной оси, а второй вход с выходом синуса угла тангажа построителя, восьмой умножитель, первый вход которого соединен с выходом датчика угловой скорости по продольной оси, а второй вход с выходом четвертого умножителя, последовательно соединенные третий дифференциатор, подключенный к выходу первого умножителя, третий сумматор, второй суммирующий вход которого соединен с выходом седьмого умножителя, третий суммирующий вход с выходом восьмого умножителя, третий компаратор и схему ИЛИ входы которой подсоединены к выходам соответственно первого, второго и третьего компараторов, а выход образует выход устройства.
Сущность изобретения заключается в определении проекций абсолютной скорости единичного вектора, ориентированного по вертикали, через его проекции скорости в связанной системе координат, определяемые по сигналам датчиков и построителя. Изменение проекций обусловлено только угловым движением ЛА и сигналами датчиков. При различии между оценками производных изменения проекций по осям связанной системы координат, полученных по выходным сигналам синуса, косинуса тангажа и крена построителя вертикали и их вычисленных значений по измерениям выходных сигналов датчиков угловых скоростей и построителя вертикали, определяется отказ построителя или датчиков угловых скоростей.
На фиг. 1 приведена структурная схема устройства для контроля построителя вертикали и датчиков угловых скоростей по осям связанной системы координат ЛА, где приняты следующие обозначения: 1 устройство для контроля построителя вертикали и датчиков угловых скоростей; 2 построитель вертикали; 3-1, 3-2, 3-3 датчики угловых скоростей соответственно по поперечной, нормальной и продольной оси связанной системы координат ЛА; 4-1, 4-2, 4-3 первый, второй и третий дифференциаторы; 5-1, 5-2, 5-3, 5-4 выходы построителя вертикали, соответственно пропорциональные синусу тангажа, косинусу крена, косинусу тангажа, синусу крена; 6-1, 6-2, 6-3 первый, второй и третий сумматора; 7-1, 7-2, 7-3 первый, второй и третий компараторы; 8-1, 8-2, 8-3, 8-4, 8-5, 8-6, 8-7, 8-8 первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой умножители; 9 схема ИЛИ.
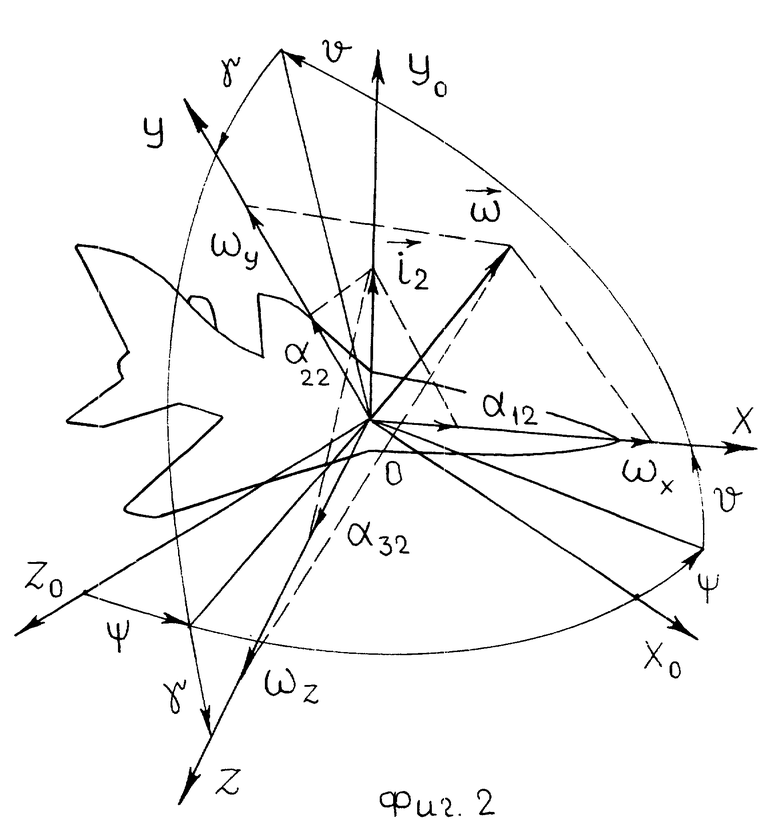
На фиг. 2 изображено взаимное положение земной OXoYoZo и связанной OXYZ систем координат через углы курса j тангажа u и крена g Там же показаны проекции wx, ωy, ωz вектора  угловой скорости ЛА и проекции a12, α22, α32 единичного вектора
угловой скорости ЛА и проекции a12, α22, α32 единичного вектора  ориентированного неизменно по вертикали на оси связанной системы координат. Очевидно, что проекции единичного вектора
ориентированного неизменно по вертикали на оси связанной системы координат. Очевидно, что проекции единичного вектора  на связанные оси будут:
на связанные оси будут:
Определим абсолютную производную вектора  [7, c. 235]
[7, c. 235]
где относительная производная единичного вектора
относительная производная единичного вектора  проекции которой на связанные оси будут
проекции которой на связанные оси будут  Векторное произведение в (4) определяется по формуле:
Векторное произведение в (4) определяется по формуле: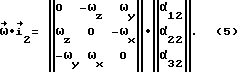
Учитывая неизменность величины и ориентации 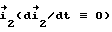 по формуле (4) получают соотношения, предлагаемые к реализации в заявляемом устройстве контроля:
по формуле (4) получают соотношения, предлагаемые к реализации в заявляемом устройстве контроля:
Устройство 1 для контроля построителя 2 вертикали и датчиков 3-1, 3-2, 3-3 угловых скоростей по осям связанной системы координат ЛА содержит последовательно соединенные первый дифференциатор 4-1, вход которого соединен с выходом 5-1 синуса угла тангажа построителя 2, первый сумматор 6-1 и первый компаратор 7-1. Оно также содержит первый умножитель 8-1, первый вход которого соединен с выходом 5-2 косинуса угла крена построителя 2, а второй вход с выходом 5-3 косинуса угла тангажа построителя 2, второй умножитель 8-2, первый вход которого соединен с выходом первого умножителя 8-1, второй вход с выходом датчика 3-1 угловой скорости по поперечной оси, а выход с первым вычитывающим входом первого сумматора 6-1, третий умножитель 8-3, первый вход которого соединен с выходом датчика 3-2 угловой скорости по нормальной оси, а выход со вторым вычитывающим входом первого сумматора 6-1. Устройство 1 содержит также четвертый умножитель 8-4, первый вход которого соединен с выходом 5-3 косинуса угла тангажа построителя 2, второй вход с выходом угла крена построителя 2, а выход со вторым входом третьего умножителя 8-3, пятый умножитель 8-5, первый вход которого соединен с выходом датчика 3-2 угловых скоростей по нормальной оси, а второй вход с выходом 5-1 синуса угла тангажа построителя 2, шестой умножитель 8-6, первый вход которого соединен с выходом датчика 3-3 угловых скоростей по продольной оси, а второй вход с выходом первого умножителя 8-1. В устройство 1 входят последовательно соединенные второй дифференциатор 4-2, вход которого соединен с выходом четвертого умножителя 8-4, второй сумматор 6-2, второй вычитывающий вход которого соединен с выходом пятого умножителя 8-5, а первый суммирующий вход с выходом шестого умножителя 8-6, и второй компаратор 7-2, седьмой умножитель 8-7, первый вход которого соединен с выходом датчика 4-1 угловой скорости по поперечной оси, а второй вход с выходом 5-1 синуса угла тангажа построителя 2, восьмой умножитель 8-8, первый вход которого соединен с выходом датчика 3-3 угловой скорости по продольной оси, а второй вход с выходом четвертого умножителя 8-4. Устройство 1 также содержит последовательно соединенные третий дифференциатор 4-3, подключенный к выходу первого умножителя 8-1, третий сумматор 6-3, второй суммирующий вход которого соединен с выходом седьмого умножителя 8-7, третий суммирующий вход с выходом восьмого умножителя 8-8, третий компаратор 7-3 и схему 9 ИЛИ, входы которой подсоединены к выходам соответственно первого, второго и третьего компараторов 7-1, 7-2, 7-3, а выход образует выход устройства 1. Выходы 5-1, 5-2, 5-3, 5-4 построителя 2 вертикали, пропорциональные sinυ, cosγ, cosυ, sinγ образованы соответствующими обмотками синусно-косинусных трансформаторов, расположенных в современных построителях 2 вертикали датчиках тангажа, крена и в их указателях на приборной доске.
Устройство для контроля построителя вертикали и датчиков угловых скоростей работает следующим образом. Сигнал с выхода 5-1 синуса угла тангажа построителя 2 вертикали поступает на вход первого дифференциатора 4-1. После дифференцирования на выходе дифференциатора 4-1 получается сигнал (sinυ)′ пропорциональный проекции относительной производной единичного вектора на ось X связанной системы координат. Этот сигнал поступает на первый суммирующий вход сумматора 6-1. Сигналы с выхода 5-2 косинуса угла крена и выхода 5-3 косинуса угла тангажа построителя 2 поступают соответственно на первой и второй входы первого умножителя 8-1, где происходит их перемножение так, что выходной сигнал умножителя 8-1 пропорционален cosυ•cosγ и поступает на первый вход второго умножителя 8-2, на второй вход которого одновременно поступает сигнал wz с выхода датчика 3-1 угловой скорости по поперечной оси ЛА. После перемножения выходной сигнал умножителя 8-2, пропорциональный составляющей проекции ωz•cosυ•cosγ поступает на первый вычитающий вход сумматора 6-1. Сигнал с выхода 5-3 косинуса угла тангажа построителя 2 поступает на первый вход умножителя 8-4, на второй вход которого поступает сигнал с выхода 5-4 синуса угла крена построителя 2, после перемножения этих сигналов, на выходе умножителя 8-4 получается сигнал, пропорциональный cosυ•sinγ Он поступает на второй вход умножителя 8-3, на первый вход которого одновременно поступает сигнал wy с выхода датчика 3-2 угловой скорости по нормальной оси ЛА. После перемножения выходной сигнал умножителя 8-3, пропорциональный составляющей проекции ωycosυsinγ поступает на второй вычитающий вход сумматора 6-1. При этом на выходе сумматора 6-1 формируется сигнал, пропорциональный сумме составляющих проекций абсолютной скорости на ось X связанной системы координат, который равен нулю при отсутствии отказов
(sinυ)′-ωz•cosυcosγ-ωy•sinγcosυ = 0. (7)
Для проверки этого равенства сигнал с выхода сумматора 6-1 поступает на вход компаратора 7-1, где с учетом порога срабатывания, пропорционального максимальной ошибке датчика угловой скорости, формируется сигнал отказа, если равенство (7) не выполняется. Этот сигнал через схему 9 ИЛИ поступает на выход устройства 1.
Сигнал с выхода умножителя 8-4 поступает на вход дифференциатора 4-2. После дифференцирования на выходе дифференциатора 4-2 получается сигнал (sinγcosυ)′ пропорциональный проекции относительной производной единичного вектора на ось Z связанной системы координат. Этот сигнал поступает на первый вычитающий вход сумматора 6-2. Сигнал с выхода датчика 3-3 угловой скорости по продольной оси ЛА поступает на первый вход умножителя 8-6, на второй вход которого поступает сигнал с выхода умножителя 8-1. После перемножения выходной сигнал умножителя 8-6, пропорциональный составляющей проекции ωxcosυcosγ поступает на первый суммирующий вход сумматора 6-2. Сигнал с выхода датчика 3-2 угловой скорости по нормальной оси ЛА поступает на первый вход умножителя 8-5, на второй вход которого поступает сигнал с выхода 5-1 синуса угла тангажа построителя 2. После перемножения выходной сигнал умножителя 8-5, пропорциональный составляющий проекции ωysinυ поступает на второй вычитающий вход сумматора 6-2. При этом на выходе сумматора 6-2 формируется сигнал, пропорциональный сумме составляющих проекций абсолютной скорости на ось Z связанной системы координат, который равен нулю при отсутствии отказов датчика и построителя так, что
-(sinγcosυ)′-ωy•sinυ+ωx•cosυcosγ = 0. (8)
Для проверки этого равенства сигнал с выхода сумматора 6-2 поступает на вход компаратора 7-2, где с учетом порога срабатывания, пропорционального максимальной ошибке датчика угловой скорости, формируется сигнал отказа, если равенство (8) не выполняется. Этот сигнал через схему 9 ИЛИ поступает на выход устройства 1.
Сигнал с выхода умножителя 8-1 поступает на выход дифференциатора 4-3. После дифференцирования на выходе дифференциатора 4-3 получаются сигнал (cosυcosγ)′ пропорциональный проекции относительной производной единичного вектора на ось Y связанной системы координат. Этот сигнал поступает на первый суммирующий вход сумматора 6-3. Сигнал с выхода датчика 3-1 угловой скорости по поперечной оси ЛА поступает на первый вход умножителя 8-7, на второй вход которого поступает сигнал с выхода 5-1 синуса угла тангажа построителя 2. После перемножения выходной сигнал умножителя 8-7, пропорциональный составляющей проекции ωz•sinυ поступает на второй суммирующий вход сумматора 6-3. Сигнал с выхода датчика 3-3 угловой скорости по продольной оси ЛА поступает на первый вход умножителя 8-8, на второй вход которого поступает сигнал с выхода умножителя 8-4, пропорциональный sinγcosυ После перемножения выходной сигнал умножителя 8-8, пропорциональный составляющей проекции wxsinγcosυ поступает на третий суммирующий вход сумматора 6-3. При этом на выходе сумматора 6-3 формируется сигнал, пропорциональный сумме составляющих проекций абсолютной скорости на ось Y связанной системы координат, который равен нулю при отсутствии отказов датчиков и построителя так, что
(cosυcosγ)′+ωzsinυ+ωx•sinγcosυ = 0. (9)
Для проверки этого равенства сигнал с выхода сумматора 6-3 поступает на вход компаратора 7-3, где с учетом порога срабатывания, пропорционального максимальной ошибке датчика угловой скорости, формируется сигнал отказа, если равенство (9) не выполняется. Этот сигнал, также как и выходные сигналы компараторов 7-1, 7-2, через схему 9 или поступает на выход устройства 1. Выходной сигнал какого именно компаратора 7-1, 7-2 или 7-3 первый поступает на выход устройства 1 зависит от ориентации, динамики ЛА в момент отказа и от того какой именно датчик или построитель отказал.
Практическая реализация заявляемого устройства контроля возможна в микросхемном исполнении так, что умножители 8-1oC8-8 строятся на микросхеме К525ПС2/[8, c. 321] сумматоры 6-1oC6-3 и дифференциаторы 4-1oC4-3 строятся на операционном усилителе К140УД8 [8, c. 286; 9, c. 77] компараторы 7-1oC7-3 на микросхеме 521СА1 или К554СА1 [9, c. 174; 8, c. 310] а схема ИЛИ на 133ЛЕ3 [8, c. 78] Конкретным примером контролируемых датчиков 3-1oC3-3 угловых скоростей могут быть унифицированные датчики типа ДУСУ, а в качестве построителя 2 вертикали малогабаритная гировертикаль МГВ-1 с выходами 5-1oC5-4, представляющими СКТ по осям подвеса [10, c. 234, 259] Возможна реализация и программными средствами БЦВМ.
Заявляемое устройство контроля обладает высокой эффективностью, так как оно контролирует все три датчика угловых скоростей по осям связанной системы координат и все четыре выхода СКТ тангажа и крена построителя вертикали. При этом достоверность контроля здесь сравнительно велика P
Источники информации.
1. Алтухов В.Ю. Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. -М. Машиностроение, 1991.
2. Автоматизированное управление полетом воздушных судов /С.М.Федоров, В. М. Кейн, О. И. Михайлов, Н.Н.Сухих; Под ред. С.М.Федорова. М. Транспорт, 1992.
3. Руководство по технической эксплуатации самолета ИЛ-86. 1981.
4. Заявка на патент РФ N 5.064.818/09/022442 от 22.05.92. Устройство для комплексного контроля датчиков пилотажной информации.
5. Белогородский С. А. Автоматизации управления посадкой самолета. М. Транспорт, 1972, с. 270-271 (прототип).
6. Бюшгенс Г.С. Студнев Р.В. Динамика продольного и бокового движения. -М: Машиностроение, 1979.
7. Бутенин Н.В. Лунц Я.Л. Меркин Д.Р. Курс теоретической механики. - М. Наука, 1976, т.1.
8. Аналоговые и цифровые интегральные микросхемы: Справочное пособие /С. В. Якубовский, Н.А.Барканов, Л.И.Ниссельсон и др./ Под ред. С.В.Якубовского. 2-е изд. М. Радио и связь, 1984.
9. Алексенко А. Г. Коломбет Е.А. Стародуб Г.И. Применение прецизионных аналоговых ИС. М. Радио и связь, 1981.
10. Воробьев В.Г. Глухов В.В. Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы, Под ред. В.Г.Воробьева. М. Транспорт, 1992.
Использование относится к комплексному контролю датчиков пилотажной информации летательных аппаратов, в том числе построителю вертикали (авиагоризонта, гировертикали) и датчикам угловых скоростей по осям связанной системы координат. Предпочтительно его использование для контроля датчиков САУ легких, маневренных ЛА, не содержащих избыточного приборног оборудования. Технический результат заключается в повышении эффективности обнаружения отказов построителя вертикали и датчиков угловых скоростей, который достигается за счет определения проекций абсолютной скорости единичного вектора, ориентированного по вертикали, через его проекции скорости в связанной системе координат. Вычисление этих проекций и проверка их соотношений по сигналам построителя вертикали и датчиков угловых скоростей позволяет определить отказ контролируемых датчиков. 2 ил.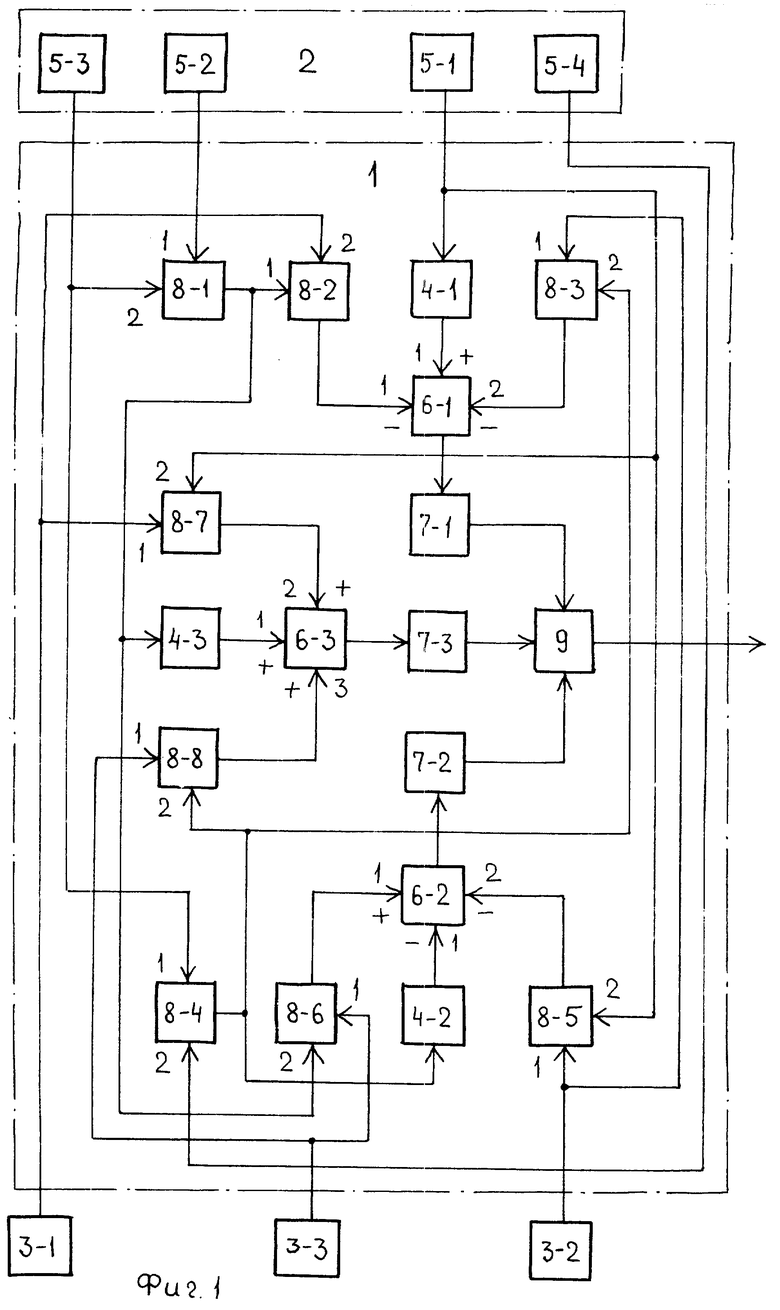
Устройство для контроля построителя вертикали и датчиков угловых скоростей, содержащее первый и второй дифференциаторы, первый и второй компараторы, отличающееся тем, что содержит последовательно соединенные первый дифференциатор, вход которого соединен с выходом синуса угла тангажа построителя, первый сумматор и первый компаратор, первый умножитель, первый вход которого соединен с выходом косинуса угла крена построителя, а второй вход с выходом косинуса угла тангажа построителя, второй умножитель, первый вход которого соединен с выходом первого умножителя, второй вход с выходом датчика угловой скорости по поперечной оси, а выход с первым вычитающим входом первого сумматора, третий умножитель, первый вход которого соединен с выходом датчика угловой скорости по нормальной оси, а выход с вторым вычитающим входом первого сумматора, четвертый умножитель, первый вход которого соединен с выходом косинуса угла тангажа построителя, второй вход с выходом синуса угла крена построителя, а выход с вторым входом третьего умножителя, пятый умножитель, первый вход которого соединен с выходом датчика угловых скоростей по нормальной оси, а второй вход с выходом синуса угла тангажа построителя, шестой умножитель, первый вход которого соединен с выходом датчика угловых скоростей по продольной оси, а второй вход с выходом первого умножителя, последовательно соединенные второй дифференциатор, вход которого соединен с выходом четвертого умножителя, второй сумматор, второй вычитающий вход которого соединен с выходом пятого умножителя, а первый суммирующий вход с выходом шестого умножителя, и второй компаратор, седьмой умножитель, первый вход которого соединен с выходом датчика угловой скорости по поперечной оси, а второй вход с выходом синуса угла тангажа построителя, восьмой умножитель, первый вход которого соединен с выходом датчика угловой скорости по продольной оси, а второй вход с выходом четвертого умножителя, последовательно соединенные третий дифференциатор, подключенный к выходу первого умножителя, третий сумматор, второй суммирующий вход которого соединен с выходом седьмого умножителя, третий суммирующий вход с выходом восьмого умножителя, третий компаратор и схему ИЛИ, входы которой подсоединены к выходам соответственно первого, второго и третьего компараторов, а выход образует выход устройства.
| Белогородский С.Л | |||
| Автоматизация управления посадкой самолета | |||
| - М.: Транспорт, 1972, с.270 - 271. |
