Изобретение относится к области комплексного контроля основных датчиков пилотажно-навигационной информации, входящих в систему управления летательного аппарата (ЛА). Оно предназначено для полетного контроля совокупности датчиков и указателей курса, тангажа, крена, образующих построитель курсовертикали, и датчиков угловых скоростей по осям связанной системы координат ЛА. Предпочтительно изобретение может быть использовано для контроля приборного оборудования легких, маневренных, отказобезопасных ЛА, которые не содержат избыточных одноименных приборов по соображениям наименьшей стоимости, веса, энергопотребления и габаритов.
Известны устройства контроля гироскопических приборов ЛА по соответствию питающих напряжений, подводимых к датчикам курса, тангажа, крена, датчикам угловых скоростей, их номинальным значениям /1, с. 26, 42; 2, с. 162, 198/. Контроль реализуется в различных устройствах с помощью пороговых элементов, реле или электродвигателя с возвратной пружиной, включенных в цепи питания проверяемого датчика. Сигнал отказа выдается при нарушении питания приборов в случае падения напряжения ниже допустимого, обрыва в сети постоянного тока или одной из фаз переменного тока. Устройство простое в реализации, надежное, имеет малый вес, стоимость, габариты, но оно не может обнаружить отказы сигнальных, коррекционных цепей датчиков, указателей и, что самое главное, осуществляет косвенный контроль, безразличный к достоверности выходных сигналов приборов.
Известно устройство контроля курсовых систем - датчиков курса, содержащее микровыключатели, расположенные на упорах в гироагрегате по оси подвеса гиромотора и на основании прибора по оси подвеса подвижного корпуса гироузла /2, с. 115, 170 - 172/. Предполагается, что при отказе датчика курса гиромотор и/или подвижный корпус "ложатся на упоры" и замыкают с помощью микровыключателей цепи, сигнализирующие об отказе курсовой системы. Однако отказы датчика курса и его указателя часто приводят к малозаметному уходу стрелки указателя относительно заданного направления, не связанному с завалом гиромотора или гироузла. Микровыключатели не срабатывают, отказ датчика курса не обнаруживается, так как контроль подобно предшествующему аналогу имеет косвенный характер. Для большинства курсовых систем это единственное автоматическое устройство полетного контроля, что явно не отвечает современным требованиям /2, с. 75; 3, с. 6/.
Известно устройство БКВГ для контроля трех одинаково ориентированных датчиков угловых скоростей /1, с. 13/. Оно содержит три импульсных трансформатора и транзисторную схему совпадения, выход которой через транзистор подключен к реле. Если скорость вращения гиромоторов всех трех датчиков угловых скоростей одинакова, то импульсы со вторичных обмоток трансформаторов одновременно поступают на входы схемы совпадения, открывающей транзистор и замыкающей сигнальные контакты реле. Контактами реле выдается сигнал "Исправность". Если скорость вращения хотя бы одного гиромотора отличается от скоростей других, то импульсы поступают на схему совпадения неодновременно. Транзистор закрывается, что приводит к размыканию контактов реле и снятию сигнала "Исправность". Устройство осуществляет контроль только вращения гиромоторов датчиков угловых скоростей, а их выходные сигналы, пропорциональные измеряемым угловым скоростям самолета, не проверяются. Контроль имеет косвенный характер, а значит его достоверность невелика. Для работы устройства необходимо иметь три идентичных датчика угловой скорости по всем трем осям самолета, что усложняет систему управления, троекратно увеличивает стоимость, вес и габариты.
Известно устройство полетного контроля БСПК для обнаружения отказа построителя вертикали, выполненного на двух одинаковых авиагоризонтах /4, с. 200 - 206/. Оно содержит два канала сравнения их выходных сигналов по крену и тангажу. Каждый канал включает сельсин-приемник "отработки", статорная обмотка которого соединена с датчиком канала тангажа (крена) первого авиагоризонта, а роторная - с входом цепи из последовательно соединенных усилителя, двигателя и редуктора. Выход последнего соединен с ротором сельсина "отработки" и ротором сельсина-приемника "сравнения", роторная обмотка которого соединена с входом компаратора, а статорная - с датчиком канала тангажа (крена) второго авиагоризонта. В компаратор поступает сигнал, пропорциональный рассогласованию углов поворота проверяемых авиагоризонтов. Если рассогласование углов достигает 7 - 10o, то компаратор выдает сигнал "Сравни АГ", по которому летчик должен выявить отказавший прибор. Распознавание отказавшего прибора в БСПК не производится. Для реализации контроля необходимо дублирование контролируемых датчиков.
Известно устройство контроля датчиков курса (БСКВ), содержащее три схемы попарного сравнения выходных сигналов трех датчиков курса и три логические схемы И /5, с. 295/. При этом входы первой схемы попарного сравнения соединены с выходами первого и второго датчиков курса, а выход - с первыми входами первой и второй логической схемы И. Входы второй схемы попарного сравнения соединены с выходами второго и третьего датчиков курса, а выход - с первым входом третьей логической схемы И и вторым входом второй логической схемы И. Входы третьей схемы попарного сравнения соединены с выходами первого и третьего датчиков курса, а выход - со вторыми входами первой и третьей логической схемы И. Срабатывание каждой из схем попарного сравнения приводит к появлению сигналов на входах логических схем И. При появлении отказа, например, первого датчика курса сигналы с выхода первой и третьей схем попарного сравнения поступают на оба входа первой логической схемы И, приводя к появлению сигнала "Отказ" на ее выходе. Выход именно первой схемы И информирует об отказе первого датчика. Аналогично осуществляется контроль и обнаружение отказов двух других датчиков. Основным недостатком подобных БСКВ устройств контроля, например БКК, является необходимость установки на борт ЛА тройного комплекта приборов одинакового назначения, что более чем в три раза увеличивает стоимость, вес, габариты и энергопотребление. Применение таких устройств на легких, маневренных ЛА невозможно.
Наиболее близким по технической сущности к заявляемому изобретению является устройство для комплексного контроля, проверяющее датчики курса, тангажа, крена и датчики угловых скоростей по осям связанной системы координат /6, с. 270, 271/. Устройство контроля, выбранное за прототип, содержит три дифференциатора, три компаратора и логическую схему ИЛИ. При этом выход датчика угла тангажа через первый дифференциатор соединен с одним из входов первого компаратора, другой вход которого соединен с выходом датчика угловой скорости по поперечной оси связанной системы координат. Выход датчика угла крена через второй дифференциатор соединен с одним из входов второго компаратора, другой вход которого соединен с выходом датчика угловой скорости по продольной оси связанной системы координат. Аналогично, выход датчика угла курса через третий дифференциатор соединен с одним из входов третьего компаратора, другой вход которого соединен с выходом датчика угловой скорости по нормальной оси связанной системы координат. Выходы первого, второго и третьего компараторов соединены со входами логической схемы ИЛИ, индицирующей на своем выходе отказ контролируемых построителя курсовертикали и датчиков угловых скоростей. Здесь датчики курса, тангажа и крена обеспечивают создание построителя курсовертикали на борту легкого ЛА при соответствующем соединении их выходов с указателями типа ПНП и ПКП летчика /6, с. 305 - 318/. Устройство осуществляет сравнение продифференцированных выходных сигналов датчиков курса, тангажа и крена построителя курсовертикали с выходными сигналами соответствующих датчиков угловых скоростей. Так сигнал, пропорциональный угловой скорости тангажа  с выхода первого дифференциатора в первом компараторе сравнивается с выходным сигналом ωz датчика угловой скорости поперечной оси связанной системы координат ЛА. Сигнал, пропорциональный угловой скорости крена
с выхода первого дифференциатора в первом компараторе сравнивается с выходным сигналом ωz датчика угловой скорости поперечной оси связанной системы координат ЛА. Сигнал, пропорциональный угловой скорости крена  , с выхода второго дифференциатора во втором компараторе сравнивается с выходным сигналом ωx датчика угловой скорости по продольной оси ЛА. Сигнал, пропорциональный угловой скорости курса
, с выхода второго дифференциатора во втором компараторе сравнивается с выходным сигналом ωx датчика угловой скорости по продольной оси ЛА. Сигнал, пропорциональный угловой скорости курса  с выхода третьего дифференциатора в третьем компараторе сравнивается с выходным сигналом ωу датчика угловой скорости по нормальной оси ЛА. При отказе одного из датчиков курса, тангажа, крена или датчиков угловых скоростей равенство сигналов на входах компараторов нарушается. Это приводит к появлению сигнала на выходе соответствующего компаратора, который через логическую схему ИЛИ информирует летчика о неисправности построителя курсовертикали или датчиков угловых скоростей.
с выхода третьего дифференциатора в третьем компараторе сравнивается с выходным сигналом ωу датчика угловой скорости по нормальной оси ЛА. При отказе одного из датчиков курса, тангажа, крена или датчиков угловых скоростей равенство сигналов на входах компараторов нарушается. Это приводит к появлению сигнала на выходе соответствующего компаратора, который через логическую схему ИЛИ информирует летчика о неисправности построителя курсовертикали или датчиков угловых скоростей.
Устройство, выбранное за прототип, использует для контроля информацию только датчиков, входящих в состав приборного оборудования легкого, маневренного ЛА. Дополнительные датчики информации для контроля не используются. Следовательно, прототип является наименьшим по весу, габаритам, энергопотреблению и стоимости, что очень важно для легких ЛА. Достоверность контроля построителя курсовертикали и датчиков угловых скоростей этим устройством весьма велика, что обусловлено простотой его микросхемной реализации.
Основным недостатком прототипа следует считать ограниченность применения устройства, а именно - для контроля построителя и датчиков угловых скоростей на ЛА, совершающем прямолинейный, горизонтальный полет, когда выполняются равенства:
В общем случае произвольного пространственного движения, характерного для легкого, маневренного ЛА, приближенное соотношение (1), лежащее в основе работы устройства контроля (прототипа), не выполняется. Точные кинематические соотношения между углами крена γ, тангажа v, продифференцированными сигналами построителя курсовертикали  и выходными сигналами датчиков угловых скоростей имеют вид /7, с. 22/
и выходными сигналами датчиков угловых скоростей имеют вид /7, с. 22/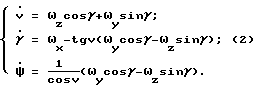
Сопоставление точных соотношений (2) и равенств (1), реализованных в прототипе, указывает на невозможность контроля при больших углах крена γ и тангажа v. Кроме того, контроль и по точным соотношениям невозможен из-за их особенности при v _→ 90°, когда угловые скорости  стремятся к бесконечности. Практическая реализация прототипа затруднена и из-за сложности получения производных
стремятся к бесконечности. Практическая реализация прототипа затруднена и из-за сложности получения производных  с типовых указателей ПНП и ПКП, не содержащих круговых потенциометров углов курса, тангажа и крена. Таким образом, применение прототипа для контроля построителя курсовертикали и датчиков угловых скоростей имеет весьма узкие возможности как по точности работы, так и по соображениям практической реализации.
с типовых указателей ПНП и ПКП, не содержащих круговых потенциометров углов курса, тангажа и крена. Таким образом, применение прототипа для контроля построителя курсовертикали и датчиков угловых скоростей имеет весьма узкие возможности как по точности работы, так и по соображениям практической реализации.
Техническая задача, решаемая изобретением, состоит в повышении эффективности обнаружения отказов построителя курсовертикали и датчиков угловых скоростей по осям связанной системы координат ЛА при произвольных углах крена, тангажа, курса последнего и отсутствии избыточных измерителей одноименных параметров, минимальных габаритах, весе, энергопотреблении и стоимости устройства, простоте его подключения к типовым указателям тангажа, крена и курса летчика на легком, маневренном самолете.
Решение технической задачи достигается тем, что в устройство для контроля построителя курсовертикали и датчиков угловых скоростей по осям связанной системы координат самолета, содержащее первый, второй, третий компараторы, выходы которых соответственно соединены с первым, вторым, третьим входами логической схемы ИЛИ, выход которой соединен с индикатором, введены блок направляющих косинусов, первый вход которого соединен с выходом синуса угла курса построителя курсовертикали, второй вход - с выходом косинуса угла курса построителя курсовертикали, третий вход - с выходом синуса угла крена построителя курсовертикали, четвертый вход - с выходом косинуса угла крена построителя курсовертикали, пятый вход - с выходом синуса угла тангажа построителя курсовертикали, шестой вход - с выходом косинуса угла тангажа построителя курсовертикали, блок проекций, первый, второй, третий, четвертый, пятый и шестой входы которого соединены соответственно с одноименными выходами блока направляющих косинусов, седьмой вход - соединен с выходом датчика угловых скоростей по поперечной оси связанной системы координат, восьмой вход - соединен с выходом датчика угловых скоростей по продольной оси связанной системы координат, девятый вход - соединен с выходом датчика угловых скоростей по нормальной оси связанной системы координат, четвертый, пятый и шестой компараторы, входы которых соединены соответственно с одноименными выходами блока проекций, а выходы - соединены с четвертым, пятым и шестым входами логической схемы ИЛИ, причем входы первого, второго и третьего компараторов соединены соответственно с первым, вторым и третьим выходами блока проекций. При этом блок направляющих косинусов содержит двенадцать умножителей так, что один из входов первого, второго, третьего, четвертого и пятого умножителей соединен с первым входом блока направляющих косинусов, второй вход которого соединен с одним входом шестого, седьмого, восьмого, девятого и десятого умножителей, вторые входы шестого и первого умножителей соединены с шестым входом блока направляющих косинусов, а их выходы соединены соответственно с первым и вторым его выходами, вторые входы второго, восьмого и первый вход одиннадцатого умножителя соединены с третьим входом блока направляющих косинусов, вторые входы третьего, седьмого и первый вход двенадцатого умножителей соединены с четвертым входом блока направляющих косинусов, вторые входы одиннадцатого и двенадцатого умножителей соединены с пятым входом блока направляющих косинусов, вторые входы четвертого и девятого умножителей соединены с выходом двенадцатого умножителя, вторые входы пятого и десятого умножителей соединены с выходом одиннадцатого умножителя, первый сумматор, входы которого соединены с выходами четвертого и восьмого умножителей, а выход - с третьим выходом блока направляющих косинусов, второй сумматор, входы которого соединены с выходами третьего и десятого умножителей, а выход - с четвертым выходом блока направляющих косинусов, первый вычитатор, суммирующий вход которого соединен с выходом второго умножителя, вычитающий вход - с выходом девятого умножителя, а выход - с пятым выходом блока направляющих косинусов, второй вычитатор, суммирующий вход которого соединен с выходом седьмого умножителя, вычитающий вход - с выходом пятого умножителя, а выход - с шестым выходом блока направляющих косинусов. Блок проекций содержит последовательно соединенные первый дифференциатор, вход которого соединен с первым входом блока проекций, третий сумматор, второй суммирующий вход которого соединен с выходом тринадцатого умножителя, вычитающий вход - с выходом четырнадцатого умножителя, а выход - с первым выходом блока проекций, последовательно соединенные второй дифференциатор, вход которого через инвертор соединен со вторым входом блока проекций, четвертый сумматор, второй суммирующий вход которого соединен с выходом пятнадцатого умножителя, вычитающий вход - с выходом шестнадцатого умножителя, а выход - со вторым выходом блока проекций, последовательно соединенные третий дифференциатор, вход которого соединен с третьим входом блока проекций, пятый сумматор, второй суммирующий вход которого соединен с выходом семнадцатого умножителя, вычитающий вход - с выходом восемнадцатого умножителя, а выход - с третьим выходом блока проекций, последовательно соединенные четвертый дифференциатор, вход которого соединен с четвертым входом блока проекций, шестой сумматор, второй суммирующий вход которого соединен с выходом девятнадцатого умножителя, вычитающий вход - с выходом двадцатого умножителя, а выход - с четвертым выходом блока проекций, последовательно соединенные пятый дифференциатор, вход которого соединен с пятым входом блока проекций, седьмой сумматор, второй суммирующий вход которого соединен с выходом двадцать первого умножителя, вычитающий вход - с выходом двадцать второго умножителя, а выход - с пятым выходом блока проекций, последовательно соединенные шестой дифференциатор, вход которого соединен с шестым входом блока проекций, восьмой сумматор, второй суммирующий вход которого соединен с выходом двадцать третьего умножителя, вычитающий вход - с выходом двадцать четвертого умножителя, а выход - с шестым выходом блока проекций, седьмой вход которого соединен с одним из входов четырнадцатого, шестнадцатого, семнадцатого и двадцать первого умножителей, восьмой вход - с одним из входов восемнадцатого, девятнадцатого, двадцать второго и двадцать третьего умножителей, девятый вход - с одним из входов тринадцатого, пятнадцатого, двадцатого и двадцать четвертого умножителей, вторые входы тринадцатого и двадцать второго умножителей соединены с четвертым входом блока проекций, вторые входы четырнадцатого и девятнадцатого умножителей соединены с пятым входом блока проекций, вторые входы пятнадцатого и восемнадцатого умножителей соединены с шестым входом блока проекций, вторые входы шестнадцатого и двадцать третьего умножителей соединены с третьим входом блока проекций, вторые входы семнадцатого и двадцать четвертого умножителей через инвертор соединены со вторым входом блока проекций, вторые входы двадцатого и двадцать первого умножителей соединены с первым входом блока проекций.
Сущность изобретения состоит в определении проекций абсолютных скоростей единичных векторов, ориентированных по горизонтальным осям земной системы координат, через их проекции в связанной системе координат самолета. Последние определяются по сигналам датчиков угловых скоростей и построителя курсовертикали. Поскольку оси земной системы координат неподвижны, то абсолютные скорости их единичных векторов равняются нулю. Это используется при оценке проекций скоростей в связанной системе координат, которые вычисляются по выходным сигналам синуса и косинуса углов тангажа, крена и курса с построителя курсовертикали и сигналам датчиков угловых скоростей. При отличии от нуля результатов вычислений проекций по сигналам контролируемых приборов делается вывод об отказе датчиков и построителя курсовертикали.
На фиг. 1 приведена структурная схема устройства для контроля построителя курсовертикали и датчиков угловых скоростей по осям связанной системы координат ЛА, где приняты следующие обозначения:
1 - устройство для контроля построителя курсовертикали и датчиков угловых скоростей;
2 - построитель курсовертикали;
3-1, 3-2, 3-3 - датчики угловых скоростей соответственно по поперечной, продольной и нормальной оси связанной системы координат ЛА;
4 - блок направляющих косинусов;
5-1, 5-2, 5-3, 5-4, 5-5, 5-6 - выходы построителя курсовертикали, пропорциональные соответственно синусу угла курса, косинусу угла курса, синусу угла крена, косинусу угла крена, синусу угла тангажа, косинусу угла тангажа;
6 - блок проекций;
7-1, 7-2, 7-3, 7-4, 7-5, 7-6 - первый, второй, третий, четвертый, пятый и шестой компараторы;
8 - логическая схема ИЛИ;
9 - индикатор.
На фиг. 2 приведена структурная схема блока 4 направляющих косинусов, где приняты следующие обозначения:
10-1 - 10-12 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый умножители;
11-1, 11-2 - первый и второй сумматоры;
12-1, 12-2 - первый и второй вычитаторы.
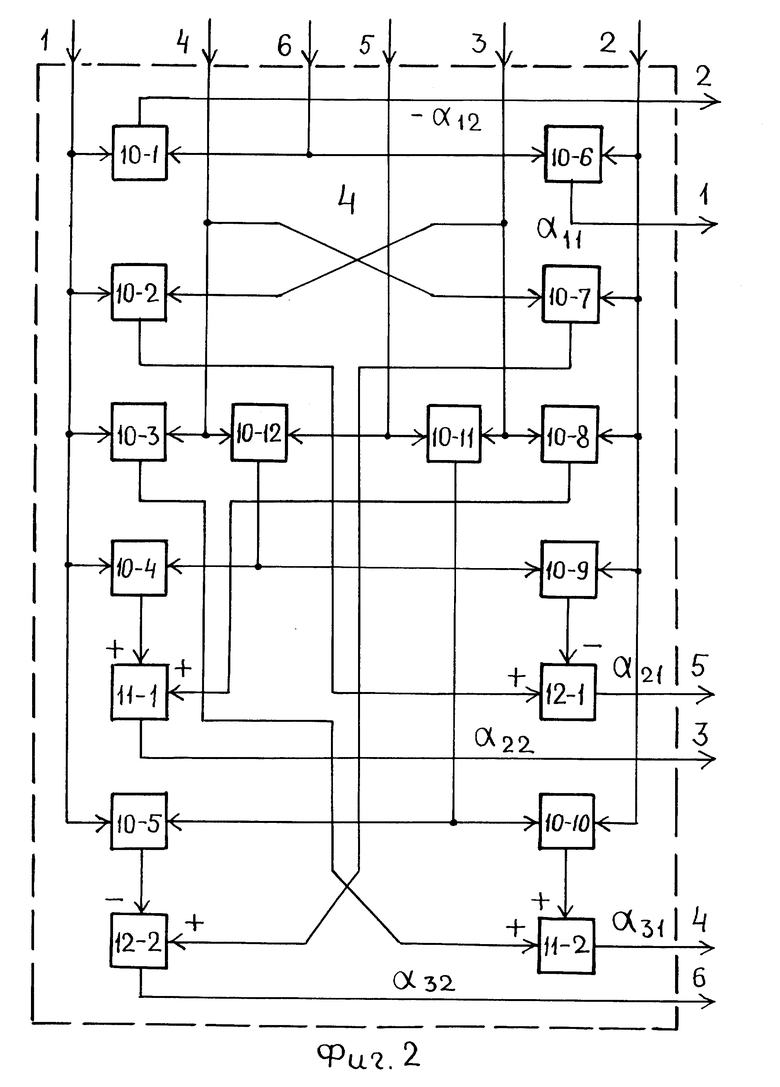
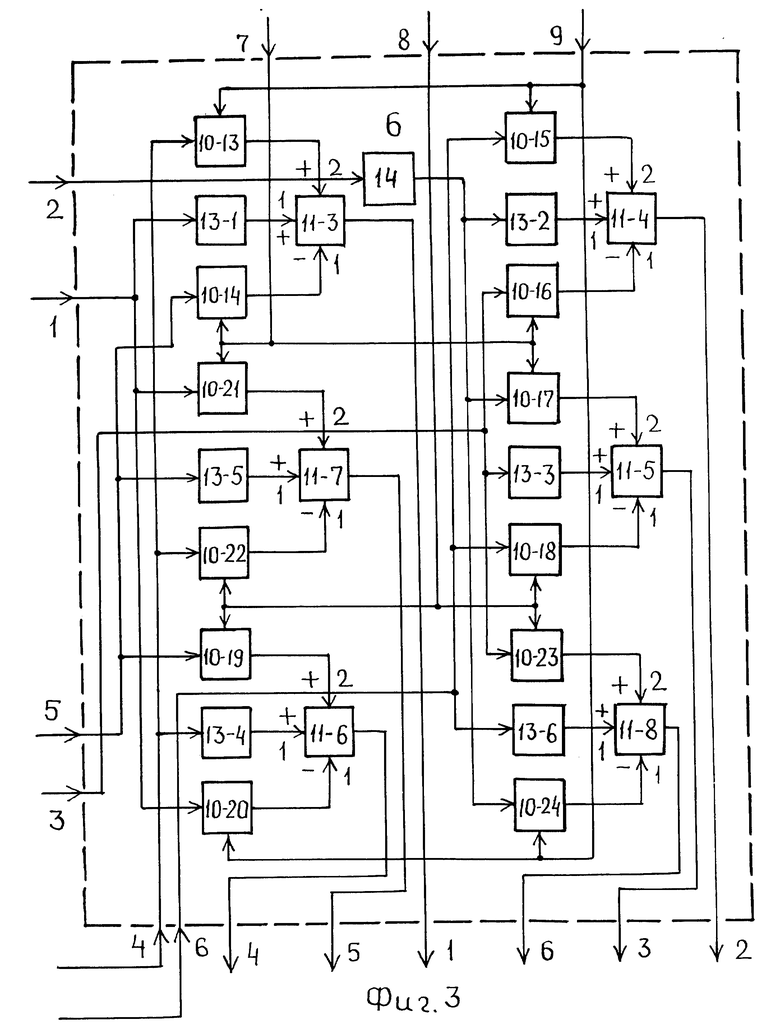
На фиг. 3 приведена структурная схема блока 6 проекций, где приняты следующие обозначения:
10-13 - 10-24 - тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый, двадцатый, двадцать первый, двадцать второй, двадцать третий и двадцать четвертый умножители;
11-3, 11-4, 11-5, 11-6, 11-7, 11-8 - третий, четвертый, пятый шестой, седьмой и восьмой сумматоры;
13-1, 13-2, 13-3, 13-4, 13-5, 13-6 - первый, второй, третий, четвертый, пятый и шестой дифференциаторы;
14 - инвертор.
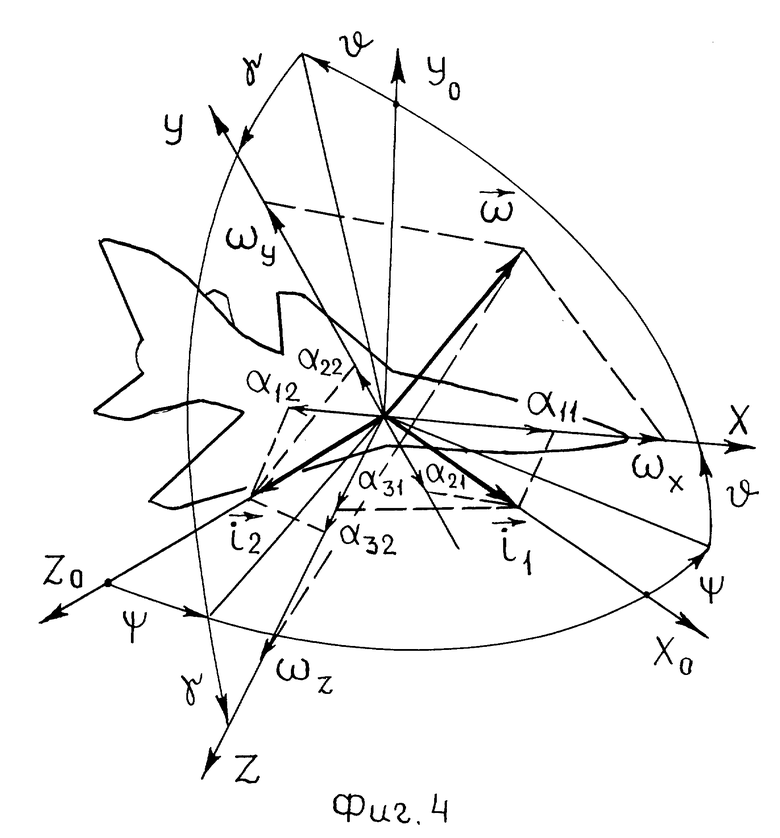
На фиг. 4 изображено взаимное положение земной OX0Y0Z0 и связанной OXYZ систем координат через углы курса ψ, тангажа v и крена γ. Там же показаны проекции ωx,ωy,ωz вектора  угловой скорости ЛА и проекции α11,α21,α31 единичного вектора
угловой скорости ЛА и проекции α11,α21,α31 единичного вектора  ориентированного неизменно по оси X0, и проекции α12,α22,α32 единичного вектора
ориентированного неизменно по оси X0, и проекции α12,α22,α32 единичного вектора  ориентированного неизменно по оси Z0 земной системы координат.
ориентированного неизменно по оси Z0 земной системы координат.
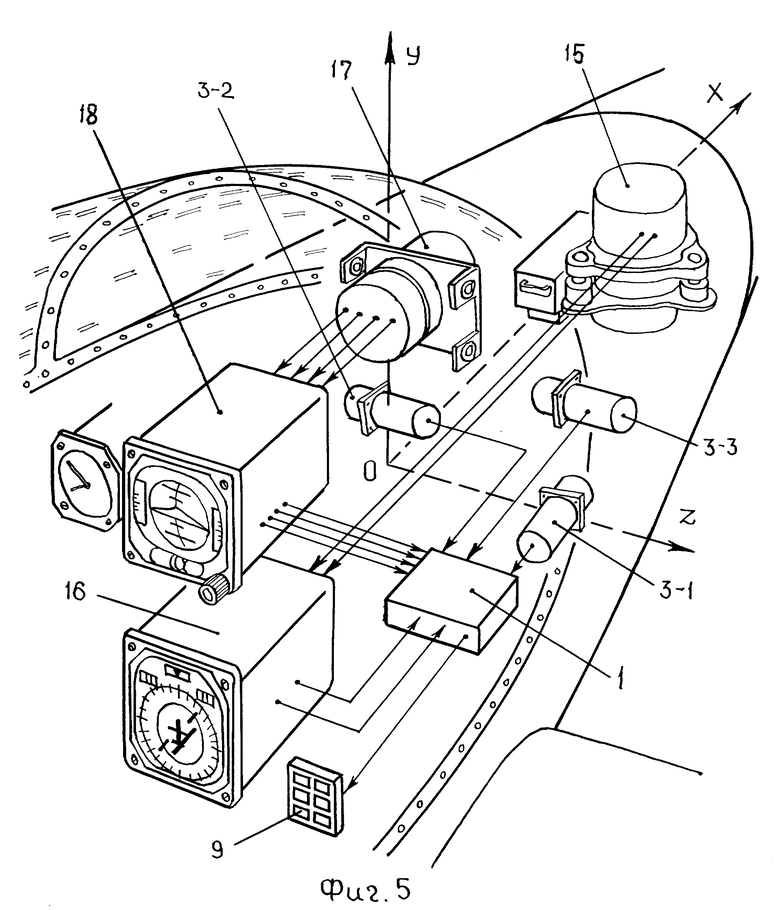
На фиг. 5 показан пример взаимосвязи устройства 1 для контроля построителя курсовертикали и датчиков угловых скоростей ЛА, который содержит:
3-1, 3-2, 3-3 - датчики угловых скоростей соответственно по поперечной, продольной и нормальной оси ЛА;
15 - датчик курса ЛА;
16 - указатель курса ЛА, содержащий выходы 5-1, 5-2, пропорциональные соответственно синусу угла курса и косинусу угла курса;
17 - датчик тангажа и крена ЛА;
18 - указатель тангажа и крена ЛА, содержащий выходы 5-3, 5-4, 5-5, 5-6, пропорциональные соответственно синусу угла крена, косинусу угла крена, синусу угла тангажа, косинусу угла тангажа.
Совокупность датчиков 15, 17 и их указателей 16, 18 образуtе построитель 1 курсовертикали на борту ЛА.
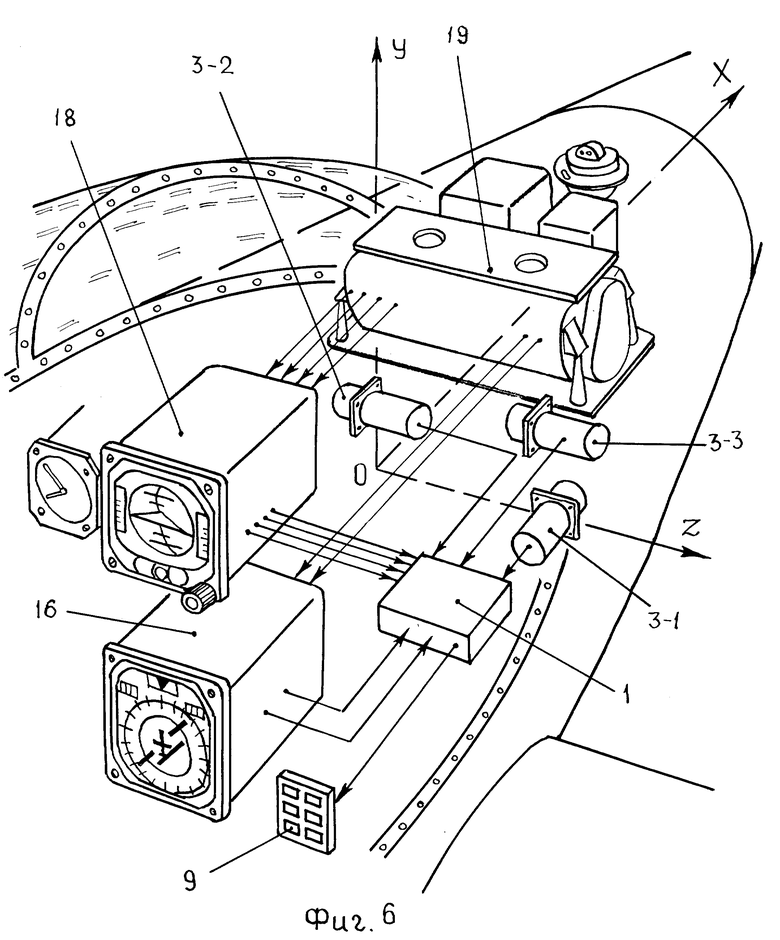
На фиг. 6 показан пример взаимосвязи устройства 1 для контроля построителя курсовертикали и датчиков угловых скоростей ЛА, который содержит единый датчик 19 курса, тангажа и крена (курсовертикаль) при тех же указателях курса 16, тангажа и крена 18. Совокупность датчика 19 (курсовертикали) и указателей 16, 18 образует в этом случае проверяемый построитель 1 курсовертикали на борту ЛА.
По фиг. 4 можно определить проекции единичных векторов  на связанные оси
на связанные оси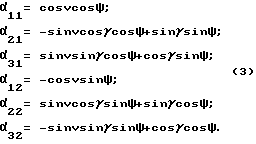
Определим абсолютные производные векторов  /8, с. 235/
/8, с. 235/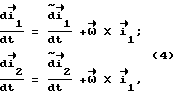
где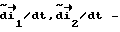 относительные производные единичных векторов, проекции которых на связанные оси имеют вид:
относительные производные единичных векторов, проекции которых на связанные оси имеют вид:
Скалярная форма уравнений (4) предполагает известное представление слагаемых от векторных произведений: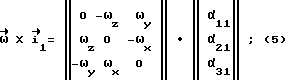
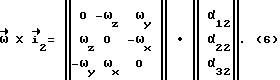
Учитывая неизменность величин и ориентации векторов  , когда
, когда  по формулам (4) получаем соотношения, предлагаемые к реализации в заявляемом устройстве контроля
по формулам (4) получаем соотношения, предлагаемые к реализации в заявляемом устройстве контроля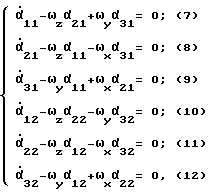
где направляющие косинусы между осями систем координат: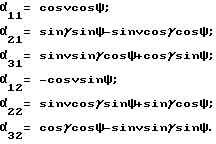
Устройство 1 для контроля построителя 2 курсовертикали и датчиков 3-1, 3-2, 3-3 угловых скоростей по осям связанной системы координат ЛА содержит блок 4 направляющих косинусов, первый вход которого соединен с выходом 5-1 синуса угла курса построителя 2 курсовертикали, второй вход - с выходом 5-2 косинуса угла курса построителя 2 курсовертикали, третий вход - с выходом 5-3 синуса угла крена построителя 2 курсовертикали, четвертый вход - с выходом 5-4 косинуса угла крена построителя 2 курсовертикали, пятый вход - с выходом 5-5 синуса угла тангажа построителя 2 курсовертикали, шестой вход - с выходом 5-6 косинуса угла тангажа построителя 2 курсовертикали. Оно также содержит блок 6 проекций, первый, второй, третий, четвертый, пятый и шестой входы которого соединены соответственно с одноименными выходами блока 4 направляющих косинусов, седьмой вход - соединен с выходом датчика 3-1 угловых скоростей по поперечной оси связанной системы координат, восьмой вход - соединен с выходом датчика 3-2 угловых скоростей по продольной оси связанной системы координат, девятый вход - соединен с выходом датчика 3-3 угловых скоростей по нормальной оси связанной системы координат. Первый, второй, третий, четвертый, пятый и шестой выходы блока 6 проекций соответственно через одноименные компараторы 7-1, 7-2, 7-3, 7-4, 7-5, 7-6 соединены с первым, вторым, третьим, четвертым, пятым и шестым входами логической схемы 8 ИЛИ, выход которой, в свою очередь, соединен с входом индикатора 9, являющегося выходом устройства.
Блок 4 направляющих косинусов предлагается выполнить содержащим двенадцать умножителей 10-1 - 10-12 так, чтобы один из входов умножителей 10-1, 10-2, 10-3, 10-4, 10-5 был соединен с первым входом блока 4 направляющих косинусов, второй вход которого соединен с одним входом умножителей 10-6, 10-7, 10-8, 10-9, 10-10. Вторые входы умножителей 10-6 и 10-1 соединены с шестым входом блока 4 направляющих косинусов, а их выходы соединены соответственно с первым и вторым его выходами. Вторые входы умножителей 10-2, 10-8 и первый вход умножителя 10-11 соединены с третьим входом блока 4 направляющих косинусов. Вторые входы умножителей 10-3, 10-7 и первый вход умножителя 10-12 соединены с четвертым входом блока 4 направляющих косинусов. Вторые входы умножителей 10-11, 10-12 соединены с пятым входом блока 4 направляющих косинусов. Вторые входы умножителей 10-4, 10-9 соединены с выходом умножителя 10-12. Вторые входы умножителей 10-5, 10-10 соединены с выходом умножителя 10-11. Выходы умножителей 10-4 и 10-8 соединены с входами первого сумматора 11-1, выход которого соединен с третьим выходом блока 4 направляющих косинусов. Выходы умножителей 10-3 и 10-10 соединены с входами второго сумматора 11-2, выход которого соединен с четвертым выходом блока 4 направляющих косинусов. Суммирующий вход первого вычитатора 12-1 соединен с выходом умножителя 10-2, вычитающий вход - с выходом умножителя 10-9, а выход - с пятым выходом блока 4 направляющих косинусов. Суммирующий вход второго вычитатора 12-2 соединен с выходом умножителя 10-7, вычитающий вход - с выходом умножителя 10-5, а выход - с шестым выходом блока 4 направляющих косинусов.
Блок 6 проекций предлагается выполнить содержащим последовательно соединенные первый дифференциатор 13-1, вход которого соединен с первым входом блока 6 проекций, третий сумматор 11-3, второй суммирующий вход которого соединен с выходом умножителя 10-13, вычитающий вход - с выходом умножителя 10-14, а выход - с первым выходом блока 6 проекций. Последовательно также соединены второй дифференциатор 13-2, вход которого через инвертор 14 соединен со вторым входом блока 6 проекций, четвертый сумматор 11-4, второй суммирующий вход которого соединен с выходом пятнадцатого умножителя 10-15, вычитающий вход - с выходом умножителя 10-16, а выход - со вторым выходом блока 6 проекций. Последовательно соединены третий дифференциатор 13-3, вход которого соединен с третьим входом блока 6 проекций, пятый сумматор 11-5, второй суммирующий вход которого соединен с выходом умножителя 10-17, вычитающий вход - с выходом умножителя 10-18, а выход - с третьим выходом блока 6 проекций. Последовательно соединены четвертый дифференциатор 13-4, вход которого соединен с четвертым входом блока 6 проекций, шестой сумматор 11-6, второй суммирующий вход которого соединен с выходом умножителя 10-19, вычитающий вход - с выходом умножителя 10-20, а выход - с четвертым выходом блока 6 проекций. Последовательно соединены пятый дифференциатор 13-5, вход которого соединен с пятым входом блока 6 проекций, седьмой сумматор 11-7, второй суммирующий вход которого соединен с выходом умножителя 10-21, вычитающий вход - с выходом умножителя 10-22, а выход - с пятым выходом блока 6 проекций. Последовательно соединены шестой дифференциатор 13-6, вход которого соединен с шестым входом блока 6 проекций, восьмой сумматор 11-8, второй суммирующий вход которого соединен с выходом умножителя 10-23, вычитающий вход - с выходом умножителя 10-24, а выход - с шестым выходом блока 6 проекций. Седьмой вход блока 6 проекций соединен с одним из входов умножителей 10-14, 10-16, 10-17, 10-21. Восьмой вход блока 6 проекций соединен с одним из входов умножителей 10-18, 10-19, 10-22, 10-23. Девятый вход блока 6 проекций соединен с одним из входов умножителей 10-13, 10-15, 10-20, 10-24. Вторые входы умножителей 10-13, 10-22 соединены с четвертым входом блока 6 проекций. Вторые входы умножителей 10-14, 10-19 соединены с пятым входом блока 6 проекций. Вторые входы умножителей 10-15, 10-18 соединены с шестым входом блока 6 проекций. Вторые входы умножителей 10-16, 10-23 соединены с третьим входом блока 6 проекций. Вторые входы умножителей 10-17, 10-24 через инвертор 14 соединены со вторым входом блока 6 проекций. Вторые входы умножителей 10-20, 10-21 соединены с первым входом блока 6 проекций.
Устройство для контроля построителя курсовертикали и датчиков угловых скоростей работает следующим образом. Сигнал с выхода 5-1 синуса угла курса построителя 2 курсовертикали поступает на первый вход блока 4 направляющих косинусов и далее на один из входов умножителей 10-1, 10-2, 10-3, 10-4, 10-5 в нем. Сигнал с выхода 5-2 косинуса угла курса построителя 2 курсовертикали поступает на второй вход блока 4 направляющих косинусов и далее на один из входов умножителей 10-6, 10-7, 10-8, 10-9, 10-10 в нем. Сигнал с выхода 5-3 синуса угла крена построителя 2 курсовертикали поступает на третий вход блока 4 направляющих косинусов и далее на один вход умножителя 10-11 и вторые входы умножителей 10-2, 10-8 в нем. Сигнал с выхода 5-4 косинуса угла крена построителя 2 курсовертикали поступает на четвертый вход блока 4 направляющих косинусов и далее на один вход умножителя 10-12 и вторые входы умножителей 10-3, 10-7. Сигнал с выхода 5-5 синуса угла тангажа построителя 2 курсовертикали поступает на пятый вход блока 4 направляющих косинусов и далее на вторые входы умножителей 10-11, 10-12. Сигнал с выхода 5-6 косинуса угла тангажа построителя 2 курсовертикали поступает на шестой вход блока 4 направляющих косинусов и далее на вторые входы умножителей 10-1, 10-6. Сигнал с выхода умножителя 10-11 поступает на вторые входы умножителей 10-5, 10-10, а сигнал с выхода умножителя 10-12 - на вторые входы умножителей 10-4, 10-9. С выхода умножителя 10-6 сигнал, пропорциональный направляющему косинусу α11, поступает на первый выход блока 4 направляющих косинусов. С выхода умножителя 10-1 сигнал, пропорциональный направляющему косинусу - α12, поступает на второй выход блока 4 направляющих косинусов. Сигналы с выходов умножителей 10-4, 10-8 поступают на входы сумматора 11-1, на выходе которого получается сигнал, пропорциональный направляющему косинусу α22 и поступающий на третий выход блока 4. Сигналы с выходов умножителей 10-3, 10-10 поступают на входы сумматора 11-2, на выходе которого получается сигнал, пропорциональный направляющему косинусу α31 и поступающий на четвертый выход блока 4. На суммирующий вход вычитатора 12-1 поступает сигнал с выхода умножителя 10-2, а на вычитающий вход - сигнал с выхода умножителя 10-9. Выходной сигнал вычитатора 12-1, пропорциональный направляющему косинусу α21, поступает на пятый выход блока 4. На суммирующий вход вычитатора 12-2 поступает сигнал с выхода умножителя 10-7, а на вычитающий вход - сигнал с выхода умножителя 10-5. Выходной сигнал вычитатора 12-2, пропорциональный направляющему косинусу α32, поступает на шестой выход блока 4. Сигналы, пропорциональные направляющим косинусам α11,α12,α22,α31,α21,α32/ , с первого, второго, третьего, четвертого, пятого и шестого выходов блока 4 направляющих косинусов поступают соответственно на первый, второй, третий, четвертый, пятый и шестой входы блока 6 проекций. Сигнал с первого входа блока 6 проекций поступает на один вход умножителей 10-20, 10-21 и вход дифференциатора 13-1. После дифференцирования с выхода дифференциатора 13-1 он поступает на первый суммирующий вход сумматора 11-3. Сигнал со второго входа блока 6 проекций через инвертор 14 поступает на один вход умножителей 10-17, 10-24 и вход дифференциатора 13-2. После дифференцирования с выхода дифференциатора 13-2 он поступает на первый суммирующий вход сумматора 11-4. Сигнал с третьего входа блока 6 проекций поступает на один вход умножителей 10-16, 10-23 и вход дифференциатора 13-3. После дифференцирования с выхода дифференциатора 13-3 он поступает на первый суммирующий вход сумматора 11-5. Сигнал с четвертого входа блока 6 проекций поступает на один вход умножителей 10-13, 10-22 и вход дифференциатора 13-4. После дифференцирования с выхода дифференциатора 13-4 он поступает на первый суммирующий вход сумматора 11-6. Сигнал с пятого входа блока 6 проекций поступает на один вход умножителей 10-14, 10-19 и вход дифференциатора 13-5. После дифференцирования с выхода дифференциатора 13-5 он поступает на первый суммирующий вход сумматора 11-7. Сигнал с шестого входа блока 6 проекций поступает на один вход умножителей 10-15, 10-18 и вход дифференциатора 13-6. После дифференцирования с выхода дифференциатора 13-6 он поступает на первый суммирующий вход сумматора 11-8. Одновременно с седьмого входа блока 6 проекций на вторые входы умножителей 10-14, 10-16, 10-17, 10-21 поступает сигнал с датчика 3-1 угловой скорости по поперечной оси связанной системы координат, пропорциональный угловой скорости ωz ЛА. С восьмого входа блока 6 проекций на вторые входы умножителей 10-18, 10-19, 10-22, 10-23 поступает сигнал с датчика 3-2 угловой скорости по продольной оси связанной системы координат, пропорциональный угловой скорости ωx ЛА. С девятого входа блока 6 проекций на вторые входы умножителей 10-13, 10-15, 10-20, 10-24 поступает сигнал с датчика 3-3 угловой скорости по нормальной оси связанной системы координат, пропорциональный угловой скорости ωy ЛА. На второй суммирующий вход сумматора 11-3 поступает сигнал с выхода умножителя 10-13, не вычитающий вход - сигнал с выхода умножителя 10-14, а не выходе сумматора 11-3 получается сигнал, пропорциональный сумме составляющих проекций абсолютной скорости вектора  на ось X связанной системы координат
на ось X связанной системы координат
С выхода сумматора 11-3 он поступает на первый выход блока 6 проекций и далее на вход компаратора 7-1, где проверяется равенство (7). На второй суммирующий вход сумматора 11-4 поступает сигнал с выхода умножителя 10-15, на вычитающий вход - сигнал с выхода умножителя 10-16, а на выходе сумматора 11-4 получается сигнал, пропорциональный сумме составляющих проекции абсолютной скорости вектора  на ось X связанной системы координат
на ось X связанной системы координат
С выхода сумматора 11-4 он поступает на второй выход блока 6 проекций и далее на вход компаратора 7-2, где проверяется равенство (10). На второй суммирующий вход сумматора 11-5 поступает сигнал с выхода умножителя 10-17, на вычитающий вход - сигнал с выхода умножителя 10-18, а на выходе сумматора 11-5 получается сигнал, пропорциональный сумме составляющих проекции абсолютной скорости вектора  на ось Y связанной системы координат
на ось Y связанной системы координат
С выхода сумматора 11-5 он поступает на третий выход блока 6 проекций и далее на вход компаратора 7-3, где проверяется равенство (11). На второй суммирующий вход сумматора 11-6 поступает сигнал с выхода умножителя 10-19, на вычитающий вход - сигнал с выхода умножителя 10-20, а на выходе сумматора 11-6 получается сигнал, пропорциональный сумме составляющих проекции абсолютной скорости вектора  на ось Z связанной системы координат
на ось Z связанной системы координат
С выхода сумматора 11-6 он поступает на четвертый выход блока 6 проекций и далее на вход компаратора 7-4, где проверяется равенство (9). На второй суммирующий вход сумматора 11-7 поступает сигнал с выхода умножителя 10-21, на вычитающий вход - сигнал с выхода умножителя 10-22, а на выходе сумматора 11-7 получается сигнал, пропорциональный сумме составляющих проекции абсолютной скорости вектора  на ось Y связанной системы координат
на ось Y связанной системы координат
С выхода сумматора 11-7 он поступает на пятый выход блока 6 проекций и далее на вход компаратора 7-5, где проверяется равенство (8). На второй суммирующий вход сумматора 11-8 поступает сигнал с выхода умножителя 10-23, на вычитающий вход - сигнал с выхода умножителя 10-24, а на выходе сумматора 11-8 получается сигнал, пропорциональный сумме составляющих проекции абсолютной скорости вектора  на ось Z связанной системы координат
на ось Z связанной системы координат
С выхода сумматора 11-8 он поступает на шестой выход блока 6 проекций и далее на вход компаратора 7-6, где проверяется равенство (12). В компараторах 7-1, 7-2, 7-3, 7-4, 7-5, 7-6 с учетом порогов срабатывания, пропорциональных максимальным допустимым ошибкам исправных построителя 2 курсовертикали и датчиков 3-1, 3-2, 3-3 угловых скоростей, формируется сигнал отказа, если одно или несколько равенств (7) - (12) не выполняется. Сигнал отказа с одного или нескольких компараторов 7-1 - 7-6 в этом случае через логическую схему 8 ИЛИ поступает на индикатор 9, который информирует летчика о неисправности проверяемых датчиков пилотажно-навигационной информации.
Практическая реализация заявляемого устройства 1 контроля возможна для типовых построителей 2 курсовертикали, содержащих указатели 16 курса типа ПНП-1, ПНП-72, ИРМ-1 и др., датчики 15 курса типа МКС, Гребень, ИКВ, СКВ и др. , указатели 18 тангажа и крена ПКП-1, ПКП-72, АГБ-96 и др., датчики 17 тангажа и крена МГВ, ИКВ, СКВ и др., а также унифицированные датчики 3-1 - 3-3 угловых скоростей типа ДУСУ, широко применяемые на современных отечественных самолетах и вертолетах /1, 5/. При этом выходы 5-1 - 5-6 построителя 2 курсовертикали могут быть сигнальными обмотками соответствующих синусно-косинусных трансформаторов (СКТ), входящих в названные указатели и датчики системы управления ЛА. Реализация элементов устройства 1 контроля, таких как умножители 10-1 - 10-24, возможна на микросхеме К525ПС1 /9, с. 320/, сумматоры 11-1 - 11-8, инвертор 14, вычитаторы 12-1, 12-2 и дифференциаторы 13-1 - 13-6 - на операционном усилителе К140УД8 /9, с. 286; 10, с. 77/, компараторы 7-1 - 7-6 - на микросхеме 521СА1 или К554СА1 /10, с. 174; 9, с. 310/, а логическая схема 8 ИЛИ - на микросхеме 133ЛЕ3 /9, с. 78/. Предпочтительна реализация программными средствами на БЦВМ 80-401 или 400, широко применяемых в бортовых комплексах современных ЛА.
Заявляемое устройство контроля обладает высокой эффективностью контроля, так как оно проверяет построитель курсовертикали и датчики угловых скоростей при любых произвольных маневрах, связанных с изменением углов крена, тангажа и курса ЛА. Достоверность контроля, определяемая через вероятность обнаружения отказа именно построителя курсовертикали и датчиков угловых скоростей, составляет Pд.з(500) = 0,90822. Это соответствует среднему времени достоверного контроля Tд.з = 5190 часов. Аналогичный высокий показатель достоверности контроля Pд.п(500) = 0,90822; Tд.п = 5190 часов имеет место и у прототипа, но только в прямолинейном, горизонтальном полете. Даже небольшое маневрирование с угловой скоростью ωy или ωz, равной 2 - 3o/с, при углах тангажа и крена порядка ±10o приводит к недопустимо большим ошибкам контроля порядка 0,5o/с и, как следствие, к ложным срабатываниям устройства контроля, выбранного за прототип. Это несомненно уменьшает достоверность контроля в прототипе. Весовой и габаритный показатели качества предлагаемого устройства, определяемые отношением веса и габаритов контролирующего устройства к весу и габаритам проверяемого построителя курсовертикали (СКВ) и датчиков угловых скоростей (ДУСУ), в заявляемом устройстве минимальны и составляют соответственно gз = 0,238; vз = 0,192. То есть устройство контроля по весу и габаритам много легче и меньше проверяемых приборов. Чтобы сопоставить полученные численные оценки качества заявляемого устройства проводилось определение аналогичных показателей для известных средств контроля построителей курсовертикали и датчиков угловых скоростей на самолетах ИЛ-86, ЯК-40, АН-26 и т.д. Так для самолета ИЛ-86 достоверность контроля с помощью систем БСКВ, БКК получилась Pд.ИЛ-86(500) = 0,90286, что соответствует времени достоверного контроля Tд.ИЛ-86 = 4893 ч. Достоверность контроля сравнительно высока, но весовой и габаритный показатели здесь велики и составляют gИЛ-86 = 2,08; vИЛ-86 = 2,39, что слишком много для устройств контроля легкого, маневренного самолета. Вес и габариты необходимого для контроля оборудования в два раза превышают вес и габариты минимального комплекта построителя курсовертикали и датчиков угловых скоростей. Несколько иное соотношение получается для показателей качества контроля на самолете местных воздушных линий ЯК-40. При контроле с помощью БСПК и отмеченных в аналогах простейших пороговых элементов весовой и габаритный показатели невелики и составляют gЯК-40 = 0,392; vЯК-40 = 0,252, но достоверность обнаружения отказа построителя курса и вертикали здесь не превышает Pд.ЯК-40 = 0,056, что соответствует сравнительно небольшому времени достоверного контроля Tд.ЯК-40 = 173 ч. Следовательно, заявляемое устройство контроля обладает наибольшей эффективностью обнаружения отказов построителя курсовертикали и датчиков угловых скоростей на легком, маневренном ЛА при отсутствии избыточных измерителей на борту. При этом оно имеет минимальные вес, габариты, энергопотребление и стоимость, которые определяются избыточностью измерителей одноименных параметров полета. Устройство использует сигналы типовых указателей курса и вертикали современных ЛА, что упрощает его подключение к бортовой аппаратуре легкого, маневренного самолета.
Источники информации
1. Алтухов В. Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. - М.: Машиностроение, 1991.
2. Богданченко Н.М. Курсовые системы и их эксплуатация на самолетах: Учебн. для авиац.-техн. училищ. - 3-е изд. - М.: Транспорт, 1983.
3. Королев Е.Н., Щербаков Л.К., Уманский В.А., Иванов Ф.Е. Анализ работы службы движения ГА за 1992 год и первое полугодие 1993 г. //Проблемы безопасности полетов. 1993, N 11.
4. Бондарчук И. Е., Харин В.И. Авиационное и радиоэлектронное оборудование самолета ЯК-40. - М.: Транспорт, 1982.
5. Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. - М.: Транспорт, 1992.
6. Белогородский С.Л. Автоматизация управления посадкой самолета. - М.: Транспорт, 1972 /прототип/.
7. Бюшгенс Г.С., Студнев Р.В. Динамика продольного и бокового движения. - М.: Машиностроение, 1979.
8. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. Т. 1 - М.: Наука, 1971.
9. Аналоговые и цифровые интегральные микросхемы: Справочное пособие /С. В. Якубовский, Н. А. Барканов, Л.И. Ниссельсон и др.; Под ред. С.В. Якубовского - 2-е изд. - М.: Радио и связь, 1984.
10. Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. - М.: Радио и связь, 1981.
Изобретение относится к области комплексного контроля основных датчиков пижотажно-навигационной информации, а именно построителя курсовертикали и датчиков угловых скоростей летательного аппарата (ЛА). Предпочтительно его использование для контроля приборов легких, маневренных ЛА, не содержащих избыточных измерителей на борту. Сущность изобретения состоит в определении проекций абсолютных скоростей векторов, ориентированных по горизонтальным осям, через их проекции в связанной системе координат. Вычисление этих проекций и проверка соотношений по показаниям построителя курсовертикали и датчиков угловых скоростей позволяют определить отказ приборов. 2 з.п.ф-лы, 6 ил.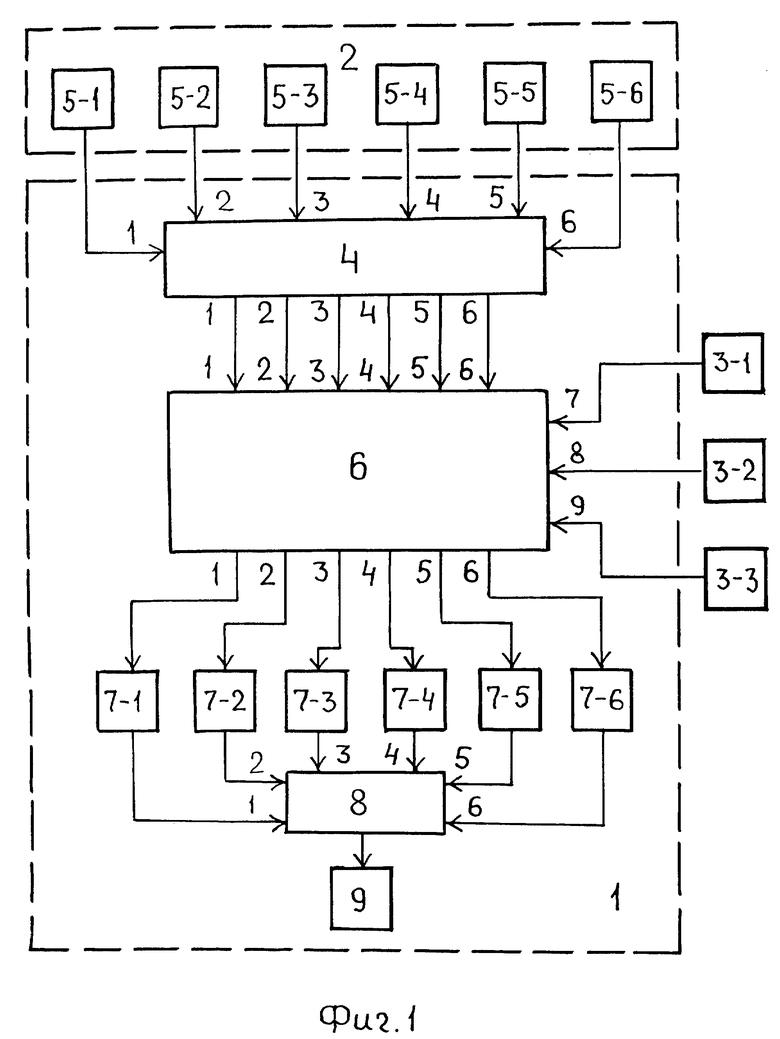
| Белогородский С.Л | |||
| Автоматизация управления посадкой самолета | |||
| - М.: Транспорт, 1972, с | |||
| Приспособление для уменьшения дымовой тяги паровоза | 1920 |
|
SU270A1 |
