Изобретение относится к медицинской технике, а именно к протезированию, и может быть использовано для приведения в действие протезов с привлечением внешнего источника энергии, а также при разработке антропоморфных механизмов, роботов, манипуляторов.
Известен электропривод локтевого механизма протеза плеча [а.с.741871 МКИ A 61 F 2/56], содержащий электродвигатель, фрикционную муфту трехступенчатый редуктор с валами-шестернями и зубчатыми колесами, компенсатор и отключающий механизм, выполненный в виде винтовой пары, винт которой образован валом-шестерней предпоследней ступени редуктора, гайка - зубчатым колесом этой ступени, а фрикционная муфта образована торцевыми поверхностями вала-шестерни и зубчатого колеса.
Недостатком данного устройства является его громоздкость и сложность кинематики.
Наиболее близким к заявленному устройству по технической сущности является электромеханический привод протезов конечностей [а.с.971312 СССР, МКИ A 61 F 2/56], содержащий реверсивный электродвигатель с выходным валом, редуктор и управляемый рычаг протеза, редуктор выполнен в виде параллельных нитей, одни концы которых закреплены на диаметральных точках выходного вала, а противоположные концы соединены с управляемым рычагом протеза.
Недостатком данного устройства является наличие значительного скручивающего момента закрученных в одну сторону нитей, приложенного к рычагу, что исключает возможность применения в протезах со сферическим шарниром, например локтевым.
Сущностью изобретения является улучшение эксплуатационных характеристик путем устранения скручивающего момента, действующего на шарнир протеза.
Это достигается тем, что в электромеханический привод протезов конечностей, содержащий реверсивный электродвигатель с выходным валом и редуктор, выполненный в виде параллельных нитей, одни концы которых соединены с управляемым рычагом протеза, введены дополнительная группа нитей и дифференциальный редуктор, причем дополнительная группа нитей размещена параллельно основной группе нитей и соединена с коробкой дифференциального редуктора, а входной вал дифференциального редуктора соединен с выходным валом реверсивного электродвигателя.
На чертеже представлен заявляемый электромеханический привод протезов конечностей.
Устройство содержит реверсивный электродвигатель 1 с выходным валом 2, соединенным со входным валом 3 дифференциального редуктора, на диаметральных точках выходного вала 4 которого закреплены параллельные нити первой группы 5. Параллельные нити дополнительной группы 6 закреплены на диаметральных точках дифференциальной коробки 7 редуктора, в которой размещены сателлиты 8.
Устройство работает следующим образом.
При включении питания реверсивного электродвигателя 1 вращение его вала 2 обеспечивает вращение входного вала 3 дифференциального редуктора. Посредством сателлитов 8 вращение передается на выходной вал 4 с закрепленными на его диаметральных точках нитями первой группы 5, которые, закручиваясь, уменьшают свою длину и воздействуют на управляющий рычаг протеза /на чертеже не показан/. Одновременно происходит вращение дифференциальной коробки 7 в противоположную сторону, что обеспечивает закручивание нитей дополнительной группы 6, закрепленных на диаметральных точках дифференциальной коробки 7, вокруг скрученных нитей первой группы 5. При этом вследствие работы дифференциала осуществляется полное выравнивание моментов закрученных нитей, т.е. на управляющем рычаге протеза, на котором закреплены вторые концы обеих групп нитей, полностью отсутствует скручивающий момент. При реверсировании электродвигателя 1 раскручивание нитей обеих групп происходит также при суммарном моменте на управляющем рычаге протеза, равном нулю, так как даже при незначительной разнице моментов закрученных нитей одной иди другой групп преимущественное вращение осуществляет звено дифференциального редуктора, к которому приложен меньший в данное время момент. Таким образом реализуется электромеханический привод протезов конечностей не создающий моментов скручивания, приложенных к рычагу протеза.
Применение заявленного электромеханического привода протезов конечностей обеспечивает по сравнению с прототипом улучшение эксплуатационных характеристик путем устранения скручивающего момента, что позволяет использовать его со сферическими шарнирами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический привод протезов конечностей | 1981 |
|
SU971312A1 |
| АВТОМОБИЛЬНЫЙ СТАРТЕР-ГЕНЕРАТОР | 1997 |
|
RU2150602C1 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРНОЙ СИСТЕМОЙ С ПЛАНЕТАРНЫМ РЕДУКТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2236079C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПРИ ИНДУКЦИОННОМ НАГРЕВЕ | 1992 |
|
RU2076465C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1992 |
|
RU2046618C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПЛОСКОЙ ЗАГОТОВКИ ПРИ ИНДУКЦИОННОМ НАГРЕВЕ | 1991 |
|
RU2032996C1 |
| УСТРОЙСТВО ИНДУКЦИОННОГО НАГРЕВА ПЛОСКИХ МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЙ | 1992 |
|
RU2076466C1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| СТАНОК ДЛЯ ФИНИШНОЙ ОБРАБОТКИ ДОРОЖЕК КАЧЕНИЯ КОЛЕЦ РОЛИКОПОДШИПНИКОВ | 1999 |
|
RU2189302C2 |
Привод относится к медицинской технике, а именно к протезированию, и может быть использован для приведения в действие протезов с привлечением внешнего источника энергии, а также при разработке антропоморфных механизмов, роботов, манипуляторов. Привод содержит реверсивный электродвигатель с выходным валом, соединенным со входным валом дифференциального редуктора, на диаметральных точках выходного вала которого закреплены параллельные нити первой группы. Параллельные нити дополнительной группы закреплены на диаметральных точках дифференциальной коробки редуктора, в которой размещены сателлиты. Технический результат заключается в улучшении эксплуатационных характеристик электромагнитного привода протезов конечностей путем устранения скручивающего момента, действующего на шарнир протеза. 1 ил.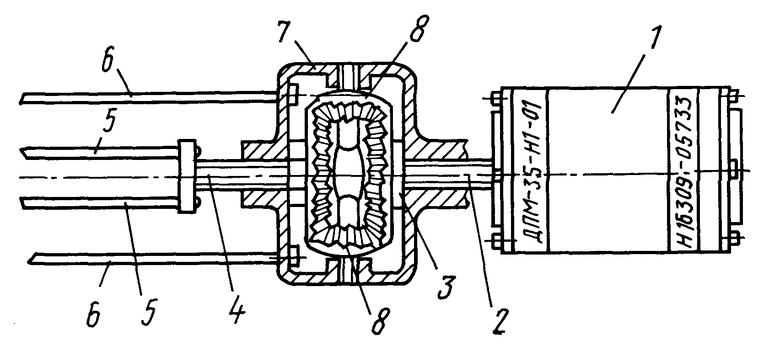
Электромеханический привод протезов конечностей, содержащий реверсивный электродвигатель с выходным валом и редуктор, выполненный в виде параллельных нитей, одни концы которых соединены с управляющим рычагом протеза, отличающийся тем, что в него введены дополнительная группа нитей и дифференциальный редуктор, причем дополнительная группа нитей размещена параллельно основной группе нитей и соединена с коробкой дифференциального редуктора, а входной вал дифференциального редуктора соединен с выходным валом реверсивного электродвигателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПЕРЕДВИЖНОЕ ДРОВОПИЛЬНО-ДРОВОКОЛЬНОЕ УСТРОЙСТВО | 1923 |
|
SU741A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАСТРАИВАНИЯ СТРУН В АВТОМАТИЧЕСКИХ СТРУННЫХ ИНСТРУМЕНТАХ | 1925 |
|
SU971A1 |
