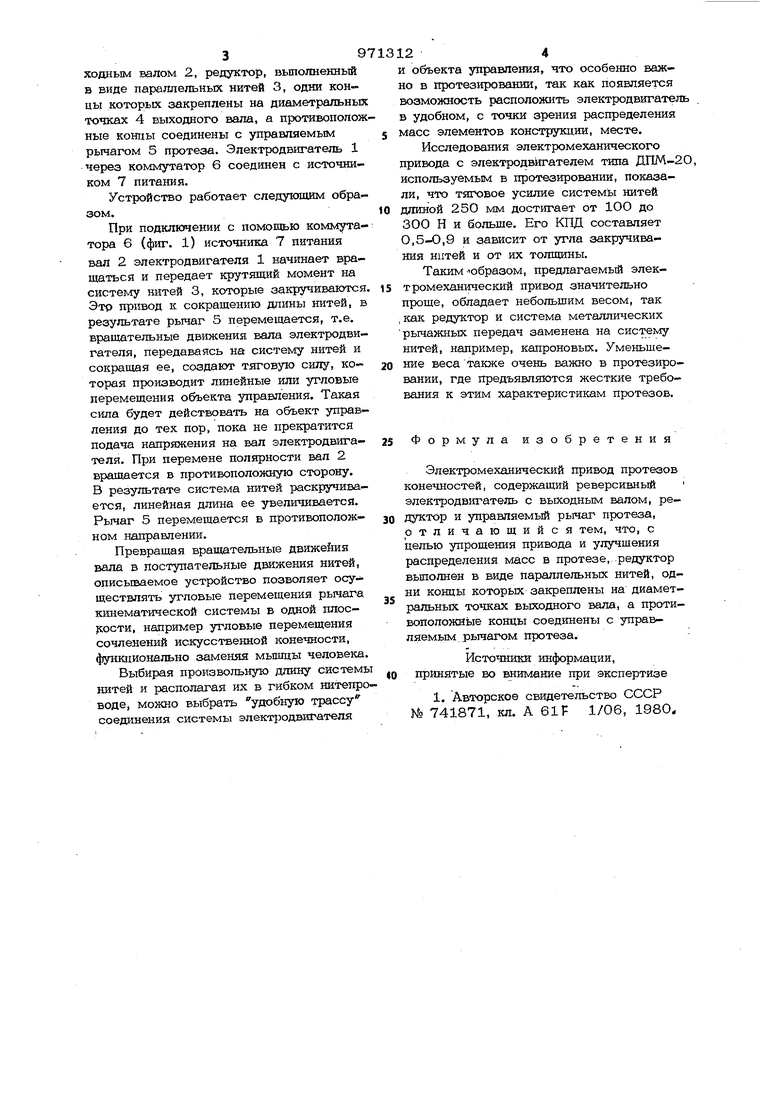
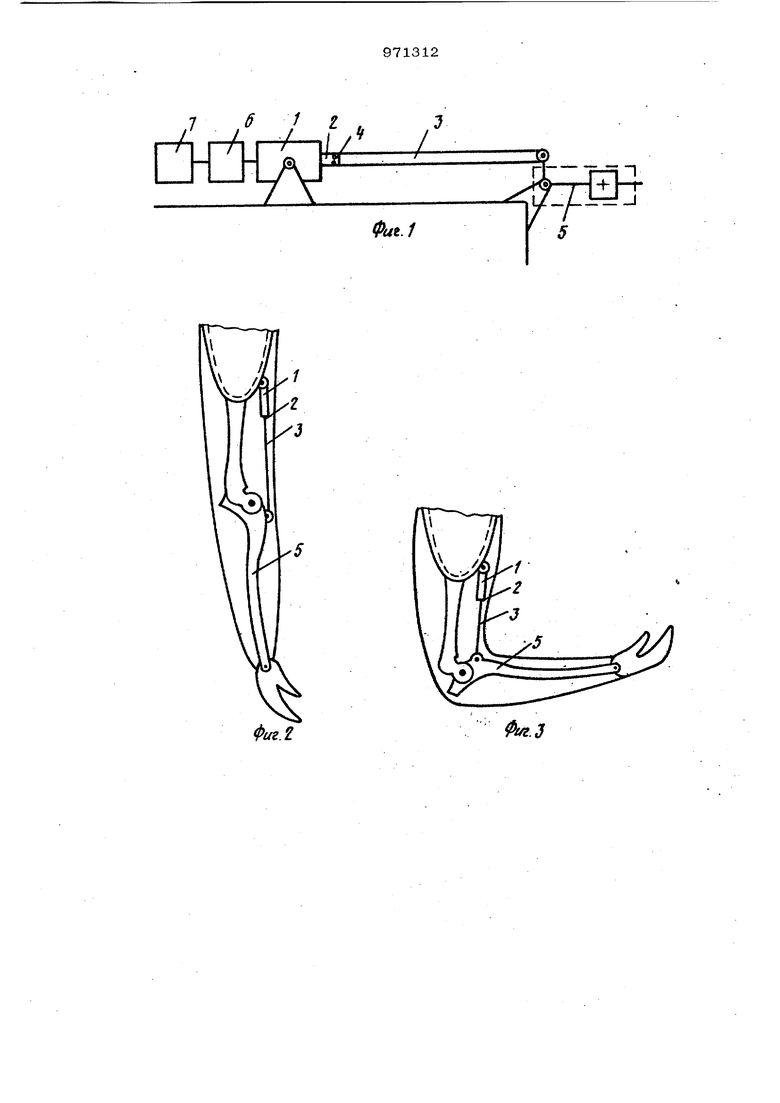
Изобретение относится к медицинской технике, а именно к протезированию, и может бьпъ использовано для приведения в действие протезов с привлечением внеш него источиика .энергии. Известен электромеханический привод протезов конечностей, который содержит реверсивный электродвигатель с выходным валом, редуктор и управляемый рычаг протеза f 1 . Однако известньА привод имеет сложную громоздкую конструкцию. Кроме того, для уменьшения длины рычажных передач и повышения КПД привод необходимо размещать непосредственно возле объектов управления, например привод пальцев искусственной кисти располагается в корпусе кисти. Это привод к нерацив нальному с точки зрения моментов распределению масс, так как в этом случае вся масса механизма будет сос|)едоточена в основном в корпусе кисти, поэтому для сгибания протеза в локте необходимо обеспечить большее усилие в локтевом шарнире, т.е. щж выполнении тех или иных движений электромеханический привод требует большого расхода мощности. Целью изобретения является упрощение привода и улучшение распределения масс в протезе. Поставленная цепь достигается тем, что в электромеханическом приводе tpoтезов коцёчностей, содержащем реверсивный электродвигатель с выходным валом, редуктор и управляемый рычаг протеза, редуктор выполнен в виде параллельных нитей, одни концы которьк закреплены на диаметральных точках выходного вала, а противоположные концы соединены с управляющим рычагом протеза. На фиг. 1 изображена кинематическая схема электромеханического привода протезов конечностей; на фиг. 2 и 3 пример использования привода в протезе плеча; на фиг. 4 - пример использования, привода в протезе бедра. Электромеханический привод содержит реверсивный электродвигатель 1 с выходным валом 2, редзпктор, выполненный в виде параллельных нитей 3, одни концы которых закреплены на диаметральных точках 4 выходного вала, а противоположные концы соединены с управляемым рычагом 5 протеза. Электрюдвигатель 1 через коммутатор 6 соединен с источником 7 питания.
Устройство работает следующим образом.
При подключении с помощью коммутатора 6 (фиг. 1) источника 7 питания вал 2 электродвигателя 1 начинает вращаться и передает крутящий момент на систему нитей 3, которые закручиваются Этр привод к сокращению длины нитей, в результате рычаг 5 перемещается, т.е. вращательные движения вала электродвигателя, передаваясь на систему нитей и сокращая ее, создают тяговую силу, которая производит линейные или угловые перемещения объекта управления. Такая сила будет действовать на объект управления до тех пор, пока не прекратится подача напряжения на вал электродвига- теля. При перемене пол$фности вал 2 вращается в противоположную сторону. В результате система нитей раскручивается, линейная длина ее увеличивается. Рычаг 5 перемещается в противоположном направлении.
Превращая вращательные движейия вала в поступательные движения нитей, описываемое устройство позволяет осуществлять угловые перемещения рычага кинематической системы в одной плосрости, например угловые перемещения сочленений искусственной конечности, функционально заменяя мьпиды человека.
Выбирая произвольную длину системы нитей и располагая их в гибком нитепроводе, можно выбрать удобную трассу соединения системы электродвигателя
и объекта управления, что особенно важно в протезировании, так как появляется возможность расположить электродвигате в удобном, с точки зрения распределения масс элементов конструкции, месте.
Исследования электромеханического привода с электродвигателем типа ДПМ-2 используемым в протезировании, показали, что тяговое усилие системы нитей длиной 250 мм достигает от 100 до 300 Н и больше. Его КПД составляет 0,5-0,9 и зависит от угла закручивания нитей и от их толщины.
Таким-Образом, предлагаемый электромеханический привод значительно проще, обладает небольщим весом, так , как редуктор и система металлических рычажных передач заменена на систему нитей, например, капроновых. Уменьще- ние веса также очень важно в протезировании, где предъявляются жесткие требования к этим характеристикам протезов.
Формула изобретения
Электромеханический привод протезов конечностей, содержащий реверсивный электродвигатель с выходным валом, редуктор и управляемый рьяаг протеза, отличающийся тем, что, с целью упрощения привода и улучщения распределения масс в протезе, редуктор вьшолнен в виде параллельных нитей, одни концы которых закреплены на диаметральных точках выходного вала, а противоположною концы соединены с управляемым рычагом протеза.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР hfo 741871, кл. А 61F 1/06, 1980
7 61
ArVir Lz j
и
I HI
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ПРОТЕЗОВ КОНЕЧНОСТЕЙ | 1995 |
|
RU2123312C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| МЕХАНИЗМ СХВАТА ДЕТСКОГО ОДНОСХВАТОВОГО БИОЭЛЕКТРИЧЕСКОГО ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2719658C1 |
| Электромеханическая кисть | 2017 |
|
RU2663942C1 |
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |
| Электромеханическая кисть | 2017 |
|
RU2663941C1 |
| СТЕНД ДЛЯ НАСТРОЙКИ И ИСПЫТАНИЙ МНОГОФУНКЦИОНАЛЬНОГО АКТИВНОГО ПРОТЕЗА ПЛЕЧА | 2019 |
|
RU2729449C1 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
«J
фиг. Ч
