Предлагаемое изобретение относится к машиностроению, приборостроению, а именно к устройствам, обеспечивающим механические перемещения рабочих органов с точностью, измеряемой нанометрами и менее. Устройство может быть использовано в прецизионных металлорежущих станках, высокоточном приборостроении, механизмах наведения телескопов, стволов орудий и др. областях.
Известен механизм малых перемещений (аналог, RU №1216519, F16Н 37/16, 1986). Он содержит корпус, расположенную в корпусе с возможностью вращения гайку, взаимодействующий с гайкой винт, установленный с возможностью осевого перемещения, кинематическую цепь, представляющую собой две пары зубчатых колес, связывающих винт с гайкой таким образом, что колесо, сидящее на винте, сопряжено с колесом, сидящим на валу, а следующее колесо, сидящее на валу, сопряжено с колесом, сидящем на гайке.
Данный механизм позволяет передавать большие усилия с относительно малой скоростью перемещения. Устройство обеспечивает увеличение хода перемещения.
Недостатком данного изобретения является то, что оно не обеспечивает при этом высокой точности позиционирования, зависящей от шага винта, который невозможно выполнить малой величины (в пределах сотых долей миллиметра).
Известен также механизм малых механических перемещений (прототип, SU №1397657, F16H 25/20, 1988), содержащий корпус с прямолинейной направляющей и резьбовым отверстием, установленный в направляющей с возможностью поступательного движения полый ползун с резьбой на его внутренней поверхности, предназначенный для взаимодействия с резьбовым отверстием корпуса, полый винт с маховичком и расположенный в полости винта с возможностью вращения второй винт с маховичком, предназначенный для взаимодействия с резьбой ползуна, маховичок на втором винте установлен с возможностью осевого перемещения, а механизм снабжен элементом связи маховичков первого и второго винтов для обеспечения периодического соединения винтов, а винты установлены один в другом без взаимного относительно друг друга перемещения.
Недостатком прототипа является низкая точность позиционирования рабочего органа, так как она зависит лишь от разности шагов двух соосных винтов.
Технический эффект, достигаемый изобретением, - повышение точности позиционирования рабочего органа (например, резца).
Технический эффект достигается тем, что устройство механического позиционирования, включающее корпус, два винта, расположенные параллельно друг другу, при этом первый винт установлен в корпусе на подшипниках и имеет зацепление с гайкой, жестко связанной с суппортом, установленным в корпусе с возможностью поступательного перемещения по направляющим качения, на винте жестко закреплена шестерня, связанная с зубчатым колесом, жестко установленным на втором винте, закрепленном в подшипниках и имеющим зацепление с гайкой, жестко связанной с салазками, установленными на суппорте с возможностью поступательного перемещения, а на конце первого винта установлен лимб, приводящий его в движение.
Величина перемещения рабочего органа определяется по формуле

где n - угол поворота лимба, t1, t2 - шаг соответственно первого и второго винтов, 
Для определенных условий, где допускается менее точный результат, можно соблюдать условие, при котором количество зубьев шестерен и шаг винтов должны быть подобраны таким образом, чтобы передаточное отношение


Как следует из (1), величина Δ уменьшается при увеличении члена 


Для повышения точности позиционирования рабочего органа необходимо соблюдать условие:
Предельное минимальное значение Δ в (1) равно нулю, т.е. Δ=0, следовательно, при стремлении величины Δ к нулю точность позиционирования повышается. Рассмотрим возникновение предельного значения Δ, равного нулю:

Разделим каждый член уравнения (2) на t2,получим

Вынесем n за скобки, получим

Так как n не может быть равно нулю (при n=0 механизм не работает), то для работающего механизма


Таким образом, высокая точность позиционирования обеспечивается при примерном равенстве отношения шагов винтов и отношения числа зубьев колес, установленных на этих винтах.
Сущность предлагаемого изобретения поясняется чертежом, где изображено устройство.
Устройство состоит из корпуса 1, в котором может поступательно перемещаться суппорт 2 по направляющим качения 3. В свою очередь по суппорту 2 могут поступательно перемещаться салазки 4 по направляющим качения 5, на которых жестко закреплен резец 6, предназначенный для обработки заготовки 7. В корпусе 1 на подшипниках 8,9 установлен винт 10, находящийся в зацеплении с гайкой 11, жестко связанной с суппортом 2. На винте 10 жестко закреплена шестерня 12 с числом зубьев z1, находящаяся в постоянном зацеплении с зубчатым колесом 13, имеющим число зубьев z2. На левом конце винта 10 установлен лимб 14 для отсчета угла поворота. Зубчатое колесо 13 жестко установлено на винте 15, закрепленном в подшипниках 16, 17 в корпусе суппорта 2. Винт 15 находится в зацеплении с гайкой 18, которая жестко связана с салазками 4.
Предлагаемое устройство работает следующим образом. При повороте рукоятки лимба 14 поворачивается шестерня 12, а следовательно, и поворачивается винт 10, который находится в зацеплении с гайкой 11, перемещает суппорт 2 (например, вправо). При этом вправо перемещаются также салазки 4 вместе с винтом 15 и зубчатым колесом 13. В связи с тем, что шестерня 12 находится в зацеплении с зубчатым колесом 13, то при повороте шестерни 12 на 360° происходит поворот зубчатого колеса в обратном направлении на угол 360° 
Возможность более точного позиционирования вершины резц, относительно оси вращающейся заготовки обеспечивает более точный размер обработанной поверхности. Таким образом предложенное устройство позволяет осуществлять настройку режущего инструмента на заданный размер с точностью нанометров, чего не позволяют известные механизмы и устройства.
Перемещение Δ будет складываться из разности хода винтов и передаточного отношения между ними:
где n - угол поворота лимба, t1, t2 - шаг соответственно - винтов суппорта и салазок, 
Величина перемещения Δ рабочего органа складывается из перемещения суппорта 2 (S1) и салазок 4 (S2), то есть:

Разложим каждое из перемещений на составляющие:

Заменим слагаемые S1 и S2 в уравнении (7) на произведение, получим: 
Вынесем n за скобки, тогда перемещение Δ будет определяться:

На основании формулы (1) были выполнены расчеты величины перемещения Δ, характеризующей точность позиционирования для различных шагов винтов t1, t2, чисел зубьев z1, z2 и их отношений.
Из таблицы следует, что при разных сочетаниях шагов t1, t2 и чисел зубьев z1, z2 имеем различную величину Δ, при этом чем ближе друг к другу находится отношение 




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического позиционирования на упоре рабочего органа станка | 1976 |
|
SU729033A1 |
| Способ отделочной обработки зубчатых элементов муфты с пространственно-модифицированными зубьями | 1989 |
|
SU1613257A2 |
| Станок для проточки канавок | 1980 |
|
SU965599A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1997 |
|
RU2123915C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЗУБЧАТЫХ КОЛЕС | 1994 |
|
RU2074794C1 |
| РАСТОЧНАЯ ГОЛОВКА | 1965 |
|
SU223566A1 |
| Суппорт зубофрезерного станка | 1983 |
|
SU1419831A2 |
| Способ отделочной обработки зубчатых элементов муфты с пространственно модифицированными зубьями | 1987 |
|
SU1511025A1 |
| РАСПРЕДЕЛЕНИЕ КАПЕЛЬ СТЕКЛОМАССЫ | 2007 |
|
RU2434815C2 |
| СУППОРТ МЕТАЛЛОРЕЖУЩЕГО СТАПКА | 1973 |
|
SU393046A1 |
Изобретение относится к способам точных перемещений и может использоваться в приводе перемещения режущего инструмента в прецизионных металлообрабатывающих станках, в высокоточном приборостроении. Устройство механического позиционирования включает корпус, два параллельно расположенных винта. Первый винт установлен в корпусе на подшипниках и имеет зацепление с гайкой, жестко связанной с суппортом, установленным в корпусе с возможностью поступательного перемещения по направляющим качения. На винте жестко закреплена шестерня, связанная с зубчатым колесом, жестко установленным на втором винте, закрепленном в подшипниках и имеющем зацепление с гайкой, жестко связанной с салазками, установленными на суппорте с возможностью поступательного перемещения. На конце первого винта установлен лимб, приводящий его в движение. Достигается высокая точность позиционирования. 1 ил., 1 табл.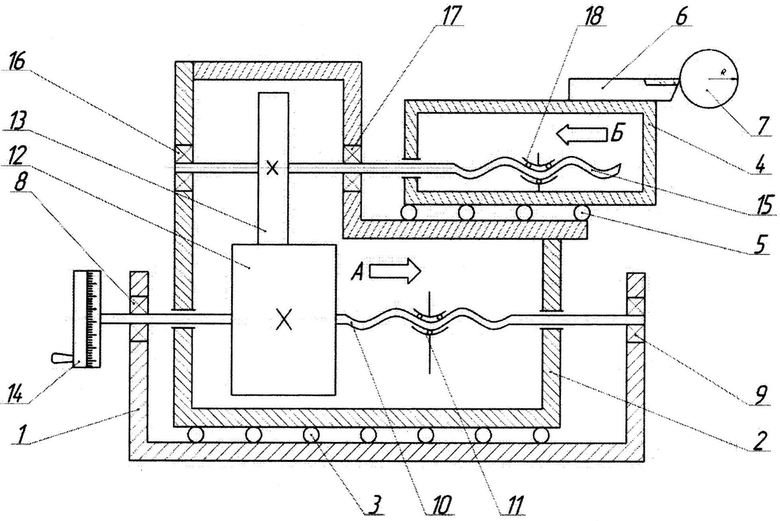
Устройство механического позиционирования, включающее корпус, два винта, отличающееся тем, что винты расположены параллельно друг другу, при этом первый винт установлен в корпусе на подшипниках и имеет зацепление с гайкой, жестко связанной с суппортом, установленным в корпусе с возможностью поступательного перемещения по направляющим качения, на винте жестко закреплена шестерня, связанная с зубчатым колесом, жестко установленным на втором винте, закрепленном в подшипниках и имеющем зацепление с гайкой, жестко связанной с салазками, установленными на суппорте с возможностью поступательного перемещения, а на конце первого винта установлен лимб, приводящий его в движение.
| Дифференциальный винтовой механизм | 1986 |
|
SU1397657A1 |
| СУДОВАЯ МАШИНКА ДЛЯ ОЧИСТКИ РЖАВЧИНЫ И КРАСКИ | 1949 |
|
SU85390A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРЕЦИЗИОННОЙ ОБРАБОТКИ | 2005 |
|
RU2315391C2 |
| US 3748789 A, 31.07.1973 | |||

