Предлагаемое изобретение относится к усовершенствованной конструкции следящего рычага, предназначенного для автоматического направления движения автодорожного транспортного средства вдоль направляющего рельса.
Заявитель предложил техническое решение в заявке на патент Франции N 9306491, относящейся к системе автоматического управления дорожным транспортным средством, движущимся вдоль направляющего рельса.
Для того чтобы лучше понять предложенные в данной заявке на патент усовершенствования следящего рычага упомянутой системы автоматического управления, ниже будет кратко описана предшествующая реализация этой системы, предложенная заявителем.
Заявленная ранее система автоматического управления движением автодорожного транспортного средства вдоль направляющего рельса содержит поднимающийся следящий рычаг, шарнирно смонтированный на конце шасси некоторого автодорожного транспортного средства. Этот следящий рычаг имеет на своем переднем конце направляющую головку, оснащенную средствами качения, предназначенными для отслеживания направляющего рельса, уложенного на дороге на дне специальной канавки.
Этот следящий рычаг смонтирован шарнирно на переднем конце конструкции кузова данного транспортного средства и имеет возможность поворачиваться относительно двух пересекающихся осей вращения. Одна их этих осей представляет собой ось качания данного рычага в вертикальной плоскости и позволяет обеспечить его подъем, а другая ось его вращения располагается вертикально и обеспечивает возможность его отклонений по направлению движения данного транспортного средства.
Упомянутый следящий рычаг имеет некоторую основную часть, образованную двумя продольно расположенными и располагающимися рядом вилками, которая может опускаться и подниматься при помощи шарнирно присоединенного гидравлического силового цилиндра.
На переднем конце упомянутых вилок располагается следящая головка, оборудованная средствами качения, образованными двумя спаренными роликами, располагающимися V-образно с вершиной, направленной вниз, и охватывающими направляющий рельс с некоторым фиксированным углом наклона по отношению к нему.
Специальный путеочистительный кронштейн располагается перед упомянутой следящей головкой защищает ее от посторонних предметов, которые могут находиться на дороге.
Из опубликованного патента DE-A-1455512 К СН известно роликовое устройство автоматического направления движения наземного транспортного средства вдоль некоторого направляющего рельса. Это устройство имеет подвижную тележку, способную поворачиваться вокруг центральной вертикальной оси, причем эта тележка образована рамой, имеющей на каждом из своих концов пару направляющих роликов, наклоненных по отношению к вертикали V-образным способом, вершина этого V направлена вниз и каждый из упомянутых роликов катится своей канавкой по одному из плеч направляющего рельса. Это устройство представляет собой орган управления движения данного транспортного средства по направлению движения, соединенный функциональными связями в виде тяг с рулевым управлением данного транспортного средства и шарнирно связанный с рамой при помощи центральной оси поворота, обеспечивающей отклонение в вертикальной плоскости. Направляющие ролики каждой пары установлены на специальных держателях, обеспечивающих возможность поворота этих роликов в отношении наклона друг по отношению к другу. Кроме того, предусмотрен специальный механизм освобождения упомянутых роликов от их натяжения по сближению.
В соответствии с одной из основных характеристик этого изобретения всегда существуют две пары направляющих роликов, смонтированных на конце тележки. Эти пары роликов, таким образом, жестко связаны между собой через упомянутую раму и существенно удалены друг от друга. Эта характеристика данного изобретения определенным образом ограничивает величину минимально допустимого радиуса кривизны поворота для данного управляемого таким образом транспортного средства. Это ограничение по величине радиуса кривизны закругления дороги является весьма неблагоприятными обстоятельством в области городского общественного транспорта, трассы движения которого зачастую, особенно в центральных частях городов со старой застройкой, имеют очень крутые повороты.
В то же время, возвратное устройство по сближению роликов, располагающееся под данным транспортным средством, труднодоступно и может управляться только вручную. По правде говоря, это устройство предназначено для использования только в исключительных случаях в процессе технического обслуживания или ремонта данного транспортного средства. Кроме того, отсутствуют какие бы то ни было автоматические режимы функционирования в части захвата направляющего рельса следящими роликами.
Таким образом, оказывается, что устройство в соответствии с упомянутым изобретением К СН не позволяет поднимать следящие ролики в процессе движения данного транспортного средства и тем более эта операция не может быть автоматизирована. Упомянутая невозможность поднятия следящих роликов в процессе движения данного транспортного средства, а следовательно, и невозможность освобождения направляющего рельса не позволяет этому транспортному средству последовательно и без затруднений переходить от участка траектории его движения в режиме отслеживания положения направляющего рельса к участку траектории, движение на котором осуществляется с ручным управлением, и обратно.
Цель предлагаемого изобретения состоит в том, чтобы дать усовершенствованную конструкцию следящего рычага, в которой следящие ролики, также располагающиеся V-образно, шарнирно связаны между собой по повороту. В конструкции предлагаемого следящего рычага некоторое устройство автоматически обеспечивает захват следящими роликами направляющего рельса и его обжатие или, наоборот, его автоматическое освобождение при помощи разведения упомянутых следящих роликов в некоторой начальной фазе, предшествующей подъему следящего рычага. Это устройство обеспечивает также автоматическую блокировку в рабочем положении направляющей головки и следящих роликов на направляющем рельсе. Эти ролики поддаются некоторой регулировке, обеспечивающей возможность некоторого обжатия направляющего рельса после его захвата упомянутыми следящими роликами предлагаемого следящего рычага.
В то же время, упомянутая шарнирная конструкция типа деформируемого параллелограмма приводится в движение при помощи гидравлического силового цилиндра. Этот гидравлический силовой цилиндр управляет целой совокупностью различных функций, среди которых подъем следящего рычага или его опускание в рабочем положении, а также движение сближения следящих роликов и их разведение для освобождения направляющего рельса.
К уже упомянутым выше преимуществам, обеспечиваемым существующим уровнем техники, характеризуемым, в частности, упомянутой заявкой на изобретение, в соответствии с данным изобретением добавляются специфические и весьма существенные дополнительные преимущества.
Конструкция следящих роликов в соответствии с предлагаемым изобретением позволяет обеспечить поглощение или компенсацию небольших отклонений, связанных с некоторыми отклонениями в кривизне проходимых поворотов.
Устройство управления сближением следящих роликов и их освобождением обеспечивает возможность точных и быстрых движений подъема и опускания следящего рычага, а также захват и освобождение направляющего рельса.
Упомянутое устройство обжатия и освобождения от механического контакта выступов направляющего рельса с полной блокировкой автоматического функционирования системы рулевого управления по направляющему рельсу исключает, например, случайное соскакивание роликов с рельса вследствие сильных и внезапных толчков.
Другие характеристики и преимущества предлагаемого изобретения будут более конкретно обозначены в приведенном ниже описании примера его практической реализации, не являющегося ограничительным, где даются ссылки на приведенные в приложении фигуры, среди которых:
- фиг. 1 представляет собой общий перспективный вид усовершенствованного рычага автоматического управления движением данного транспортного средства, отслеживающего положение некоторого направляющего рельса;
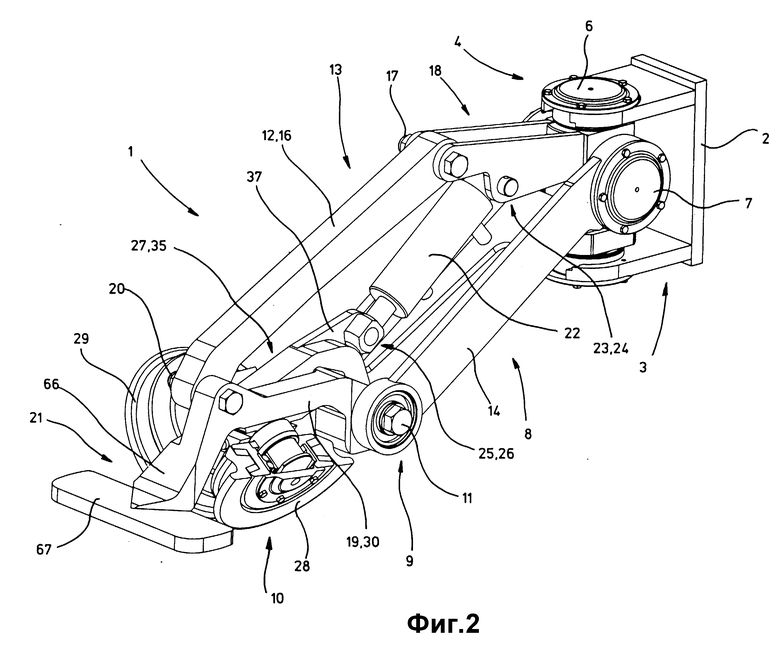
- фиг. 2 представляет собой перспективный вид спереди справа следящего рычага в соответствии с прилагаемым изобретением с демонстрацией сечения одного из следящих роликов;
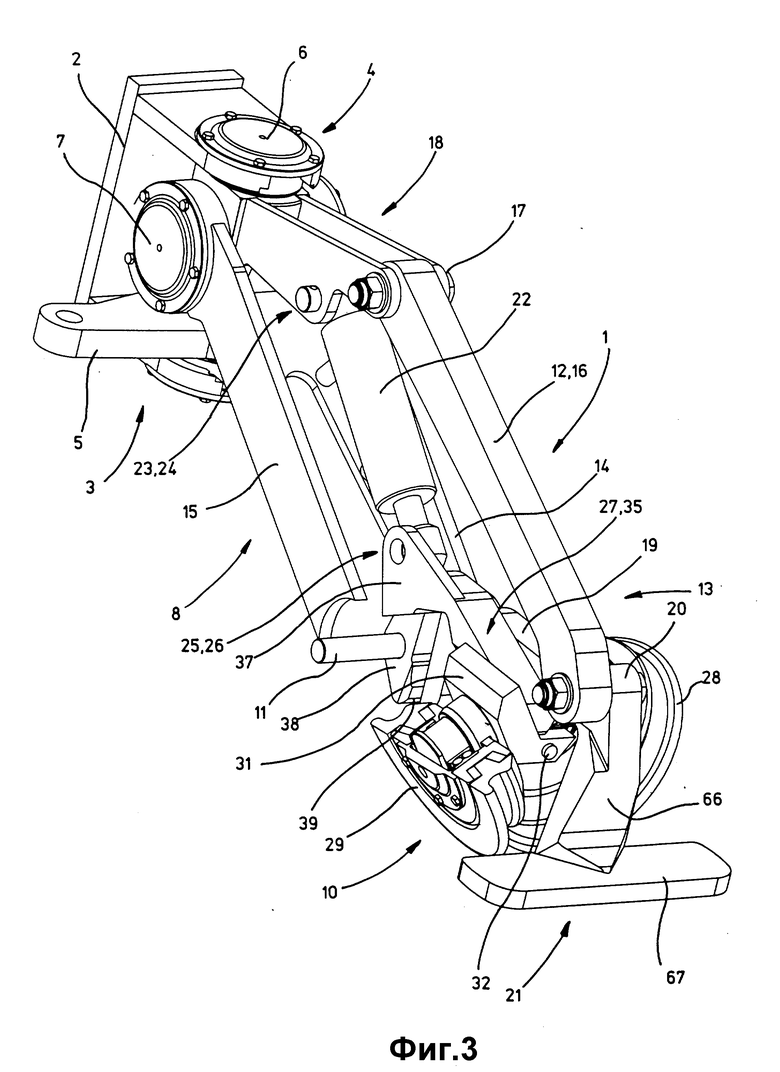
- фиг. 3 представляет собой схематический перспективный вид спереди слева направляющего рычага или следящего рычага в соответствии с предлагаемым изобретением с демонстрацией сечения одного из следящих роликов;
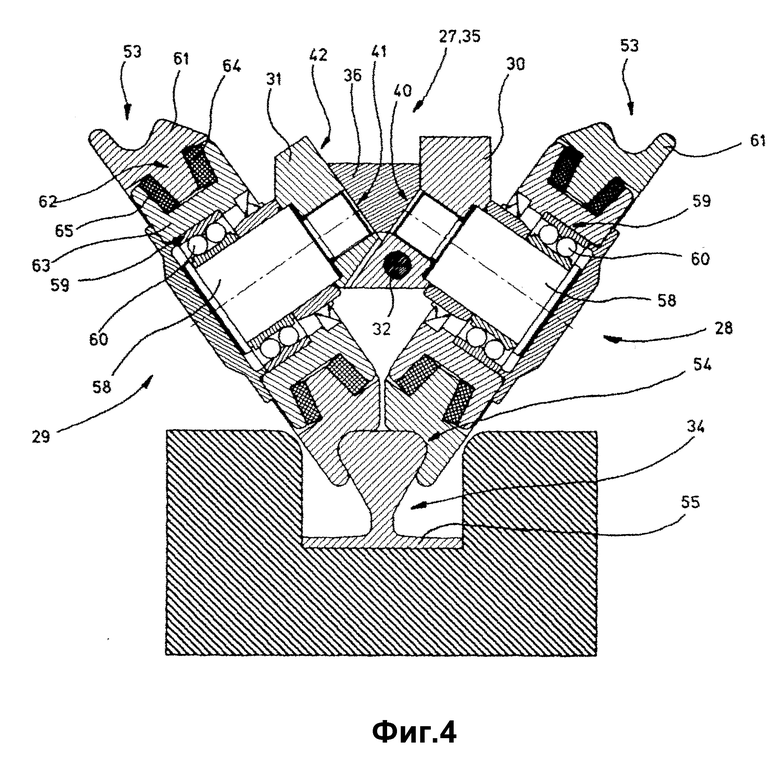
- фиг. 4 представляет собой схематический вид в поперечном разрезе пары следящих или направляющих роликов в их рабочем положении, то есть в процессе качения по направляющему рельсу;
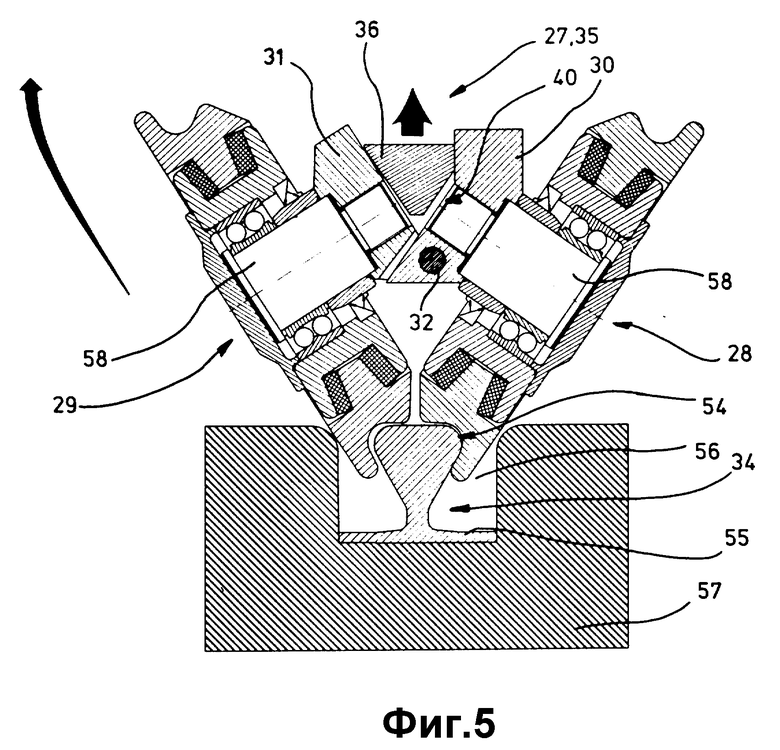
- фиг. 5 и 6 представляют собой схематические виды в поперечном разрезе пары следящих или направляющих роликов, иллюстрирующие подъем детали наклона, выполненной в виде клина, для освобождения кронштейнов этих роликов;
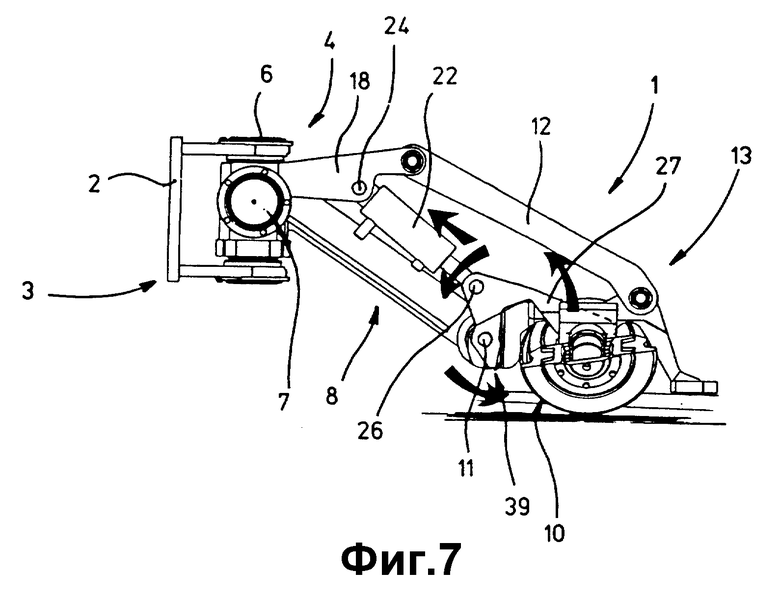
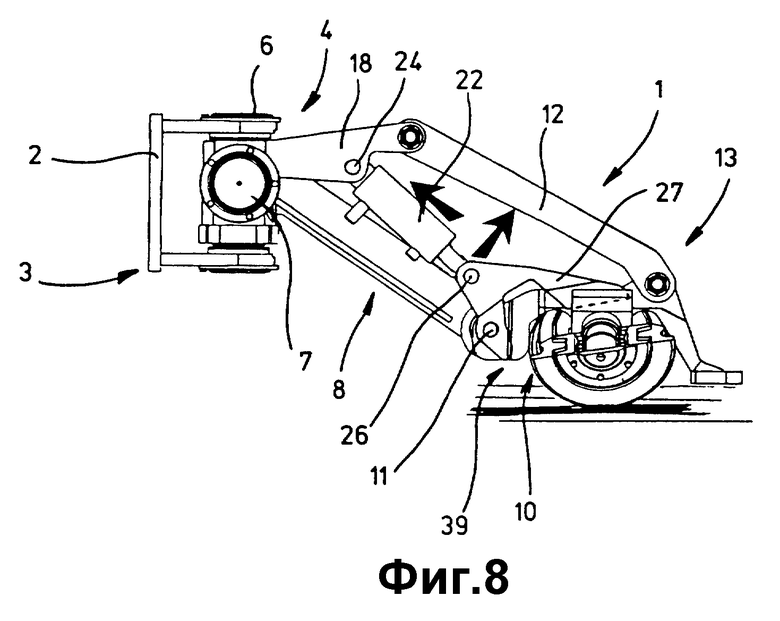
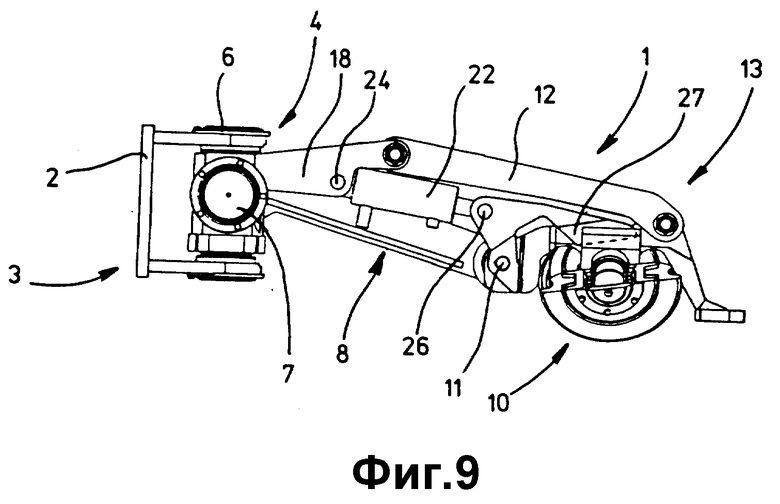
- фиг. 7, 8 и 9 представляют собой схематические виды сбоку следящего рычага в соответствии с предлагаемым изобретением, иллюстрирующие положения шарнирно связанных между собой элементов в основных фазах кинематики рычага;
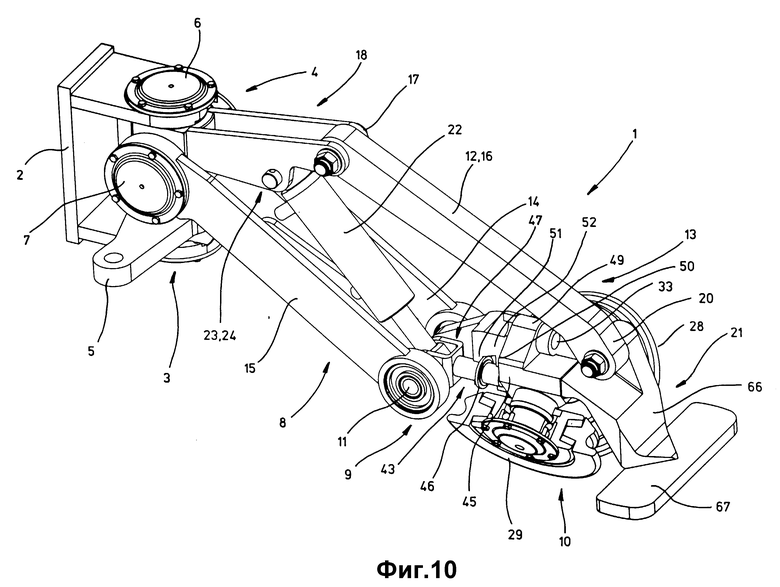
- фиг. 10 представляет собой схематический перспективный вид с левой стороны, показывающий реализацию рычага с конической деталью приведения в действие;
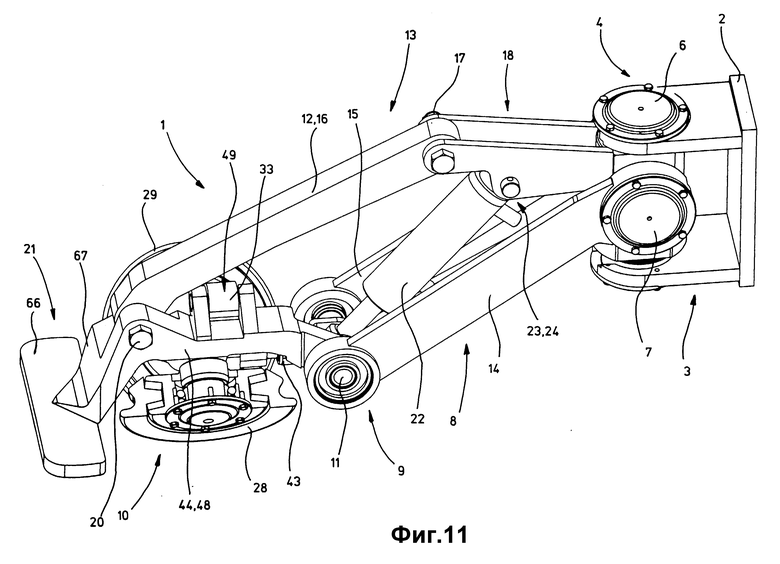
- фиг. 11 представляет собой схематический перспективный вид с правой стороны, показывающий реализацию рычага с конической деталью разведения.
Усовершенствованный поднимающийся следящий рычаг системы автоматического управления транспортного средства по направляющему рельсу в соответствии с предлагаемым изобретением представляет собой чувствительный орган, отслеживающий положение направляющего рельса и воздействующий на систему рулевого управления данного транспортного средства.
В этой системе рулевого управления с автоматическим следованием по заданной траектории функцию датчика направления движения выполняет следящий направляющий рычаг 1, смонтированный в карданом кронштейне 2 шасси дорожного транспортного средства. Этот кронштейн образует центр шарнирного соединения 3, которое сформировано блок-осью 4, продолженной в боковом направлении рычага привода рулевого управления 5. Эта блок-ось или карданный подвес обеспечивает возможность поворота вокруг вертикальной оси 6 по направлению и вокруг горизонтальной оси 7 подъема и опускания следящего и направляющего рычага, проходящей сквозь тело блок-оси 4.
Следящий и направляющий рычаг 1 имеет форму прямолинейной удлиненной шарнирной деформируемой рамки, образованной несколькими ветвями постоянной длины, шарнирно связанными с двумя осями поворота фиксированной высоты и шарнирно связанными между собой. Нижняя ветвь и верхняя ветвь соединены между собой спереди при помощи концевой ветви и сзади при помощи фиксированной ветви в плоскости подъема рычага.
Упомянутый рычаг образован прежде всего нижней наклонной конструкцией постоянной длины 8, шарнирно связанной по вращению своим верхним концом с блок-осью 4 при помощи горизонтальной оси качания 7 и шарнирно связанной по вращению своим нижним концом 9 с механическим корпусом следящей головки 10 относительно нижней оси вращения 11. Эта следящая головка 10 образует концевую ветвь.
Далее упомянутая рамка образована верхней ветвью в виде шарнирного соединительного рычага 12, предназначенного для формирования вместе с упомянутой уже нижней наклонной конструкцией 8 и другими элементами, в частности, концевой ветвью концевой деформируемой рамки, называемой в дальнейшем шарнирной деформируемой системой 13 типа деформируемого параллелограмма.
Упомянутая нижняя наклонная конструкция 8 образована двумя наклонными параллельными тягами 14 и 15, тогда как соединительный рычаг 12 образован центральной тягой 16, шарнирно соединенной по вращению с одной стороны при помощи верхней оси поворота 17 с верхней вилкой 18, а с другой стороны, при помощи передней оси поворота 20, с механическим соединительным блоком 19. Этот механический соединительный блок 19 продолжается в направлении вперед путеочистительным кронштейном 21 и проходит назад вплоть до нижней оси поворота 11, установленной в нем, на которой могут поворачиваться нижние тяги 14 и 15. Эта конструкция образует упомянутую выше шарнирную систему 13, деформируемую под действием приводного силового гидравлического цилиндра 22, шарнирно связанного с каждым из ее концов. Верхний конец 23 силового цилиндра 22 шарнирно связан по вращению с верхней вилкой 18 в непосредственной близости от ее свободного конца при помощи оси поворотов 24, а нижний конец 25 этого силового цилиндра 22 шарнирно связан по вращению при помощи оси 26 с приводной деталью 27 устройства управления наклоном для обеспечения захвата следящими роликами направляющего рельса или его освобождения.
Устройство управления наклоном роликов автоматически обеспечивает, исходя из соответствующих толкающих или тянущих усилий и движений приводного силового гидравлического цилиндра 22 посредством специальной детали наклона 27, подвижной по отношению к следящей головке, освобождение или сближение следящих роликов, а также положение самоблокированного конца рабочего хода.
Теперь будут более подробно рассмотрены используемые в конструкции следящего и направляющего рычага в соответствии с предлагаемым изобретением специальные средства.
Устройство управления наклоном состоит из детали наклона 27, шарнирно связанной по вращению с концом штока силового гидравлического цилиндра либо в точке, совпадающей с нижней осью поворота 11, либо находящейся отдельно от этой оси.
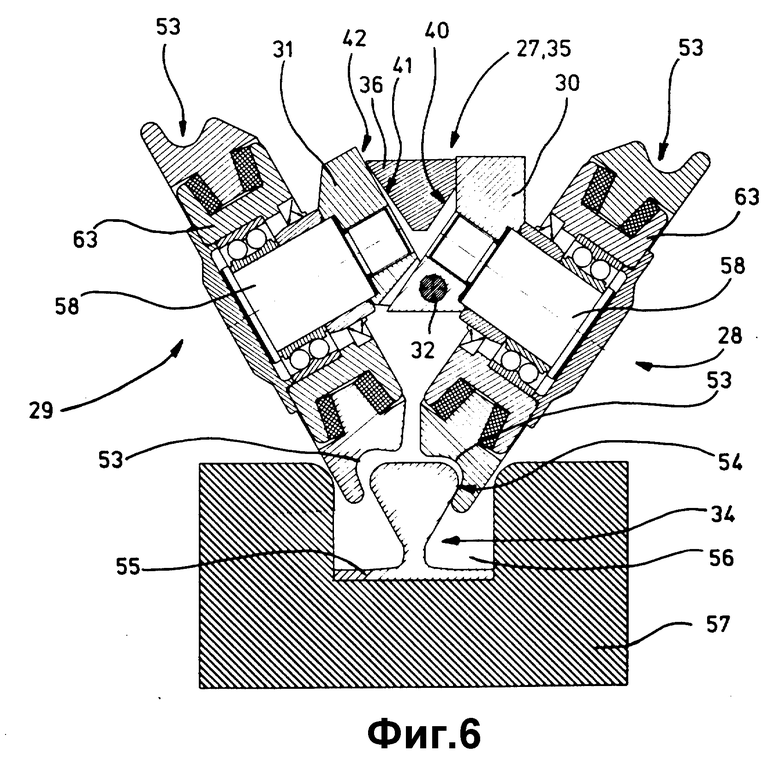
Следящая головка оборудована средствами качения, образованными двумя роликами 28 и 29, расположенными V-образно друг по отношению к другому с вершиной этой буквы, направленной вниз. Эти ролики смонтированы на двух держателях 30 и 31, шарнирно связанных между собой по вращению относительно нижней оси 32 или верхней оси 33 по отношению к детали наклона 27.
В соответствии с представленным на приведенных в приложении фигурах вариантом реализации, один из двух следящих роликов является неподвижным по наклону. Сближение или разделение этих следящих роликов осуществляется при помощи движения одного из них по отношению к другому.
В рабочем положении ролики находятся в зацеплении с выступами направляющего рельса 34, который они слегка обжимают. Эти ролики удерживаются, например, в этом положении путем блокировки, обеспечиваемой приводным силовым цилиндром, поддерживаемым под небольшой нагрузкой, или давлением, или при помощи "игры" наклона малого угла на упомянутой детали, или при помощи любого другого средства.
Эти ролики располагаются на двух держателях 30 и 31 различной формы, располагающихся таким образом, чтобы упомянутые ролики 28 и 29 образовывали V-образную конструкцию с вершиной, направленной ниже. На наружных поверхностях этих держателей смонтированы оси качения упомянутых роликов.
Один из упомянутых держателей роликов или оба также держателя приводятся в движение, приводящее к освобождению рельса или к сближению роликов при помощи приводной детали 27, которая смонтирована шарнирно на конце штока приводного гидравлического силового цилиндра 22.
Возможны различные технические варианты практической реализации упомянутой детали наклона 27. Глазная функция этой детали состоит в том, чтобы вызвать поворот по меньшей мере одного держателя следящего ролика при помощи одного относительного перемещения этой детали по отношению к другому держателю.
Среди многочисленных существующих вариантов реализации этой детали наклона 27 ниже будут описаны два возможных способа ее реализации, приемлемые в данном случае: способ реализации в виде клина и способ реализации в виде стержня с коническим концом.
В соответствии с первым способом реализации держатели роликов 30 и 31 образуют между собой некоторый объем, в который может быть вставлена упомянутая деталь наклона 27, движение которой вызывает поворот по отношению к их общей оси вращения по меньшей мере одного из двух держателей следящих роликов.
В соответствии с этим первым способом реализации упомянутая деталь наклона представляет собой башмак 35 с передним концом 36, выполненным в виде клина.
Задняя часть этой приводной детали имеет выступ в виде боковой пластины, при помощи которой она соединяется шарнирно с концом штока силового цилиндра. Нижняя часть 38 этой детали наклона, имеющей в целом изогнутую форму в виде колена, шарнирно связана по вращению с нижней осью поворота 11. В представленном случае реализации фронтальная поверхность этой нижней части в виде колена служит упорной поверхностью для поперечного элемента, чтобы обеспечить возможность подъема данного следящего и направляющего рычага в соответствии с предлагаемым изобретением.
Как уже было указано выше, передний конец упомянутой детали наклона выполнен в виде клина. Этот клин имеет с правой стороны плоскую и вертикальную боковую поверхность в своей верхней части, которая продолжается в направлении вниз наклонной плоскостью 40, и с левой стороны имеет боковую плоскость 41, наклоненную под соответствующим углом. Каждый из шарнирно связанных между собой держателей следящих роликов 30 и 31 имеет с внутренней стороны боковую поверхность. Эти внутренние боковые поверхности держателей следящих роликов располагаются друг против друга. Правый (если смотреть на приведенные в приложении фигуры) держатель следящего ролика 30 фиксирован по своему наклону и содержит внутреннюю вертикальную боковую плоскость, затем переходящую в наклонную плоскость, тогда как левый держатель 31 является подвижным по наклону путем поворота и имеет внутреннюю боковую поверхность 42, наклонную, например, на тот же угол, и располагающаяся против нее шарнирная боковая поверхность 41 клиновидного конца 36.
Располагающиеся друг против друга с внутренней стороны поверхности держателей следящих роликов формируют некоторый приемный объем, по меньшей мере одна из боковых стенок которого является подвижной по наклону.
Эти располагающиеся друг против друга боковые поверхности держателей следящих роликов используются в данном случае как площадки толкания приводным башмаком 35, образующим здесь упомянутую деталь наклона, сходящаяся форма боковых поверхностей конца которого позволяет преобразовать его движение опускания и продвижения вперед в движение разведения боковых стенок упомянутого приемного объема и, таким образом, в движение сближения следящих роликов до их вхождения в контакт зацепления с выступами направляющего рельса, последующего обжатия этого рельса и автоматического блокирования в этом положении.
Здесь следует уточнить, что упомянутая самоблокировка может быть результатом состояния приводного силового цилиндра, который в этом случае оставляется под некоторым давлением в конце хода толкания или следствием соответствующего более пологого наклона упомянутой детали наклона клиновидной формы, а также может выполняться при помощи любых других средств.
Схемы, приведенные на фиг. 7, 8 и 9, дают возможность объяснить в целом характер функционирования, относящегося к движениям следящего и направляющего рычага, а также следящих роликов.
Движение подъема следящего и направляющего рычага осуществляется в три фазы, последовательно проиллюстрированные упомянутыми выше фигурами, которые могут быть сведены с фигурами, демонстрирующими поперечный разрез.
Упомянутый рычаг находится в исходном опущенном состоянии со следящими роликами, находящимися в зацеплении с направляющим рельсом, то есть слегка обжимающими этот рельс.
В этом состоянии упомянутый башмак 35 упирается в дно упомянутого приемлемого объема и его передней конец, образующий деталь управления наклоном следящих роликов, опущен под действием приводного силового цилиндра и остается блокированным в этом положении в результате усилия приводного силового цилиндра, находящегося под небольшим давлением, или блокированным в этом положении при помощи любого другого средства. Упомянутая деталь управления наклоном следящих роликов заставляет эти ролики обжимать направляющий рельс как путем прямого воздействия на левый ролик, так и в результате механической реакции противоположного ему правого ролика.
Движение подъема следящего и направляющего рычага начинается с освобождения следящих роликов. Это освобождение осуществляется путем простого поворота упомянутого башмака 35 в направлении назад вокруг оси 11 под действием движения втягивания штока приводного силового гидравлического цилиндра. В процессе этого движения передней конец упомянутого башмака 35 приподнимается и освобождает таким образом для свободного движения левый держатель следящего ролика.
Упомянутое движение поворота назад башмака 35 означает прекращение контакта передней поверхности нижнего конца изогнутой части этого башмака с располагающейся против нее упорной поверхностью.
Продолжение упомянутого выше втягивания штока приводного гидравлического силового цилиндра вызывает деформацию упомянутой выше деформируемой системы 13 путем сближения нижней наклонной конструкции 8 и верхней части рычага одновременно с небольшим его удлинением тем, чтобы оказаться в положении, схематически показанном на фиг. 9. В этом положении рычаг слежения и направления движения данного транспортного средства поднят и следящие ролики освобождены от контакта с направляющим рельсом.
Таким образом, реализован автоматический механизм подъема и управления следящими роликами по их наклону, действующий только в результате функционирования приводного силового цилиндра, который управляет различными функциями и последовательностью их практической реализации.
Втягивание штока упомянутого приводного силового гидравлического цилиндра приводит последовательно и автоматически к освобождению следящих роликов от контакта с направляющим рельсом и подъему всей следящей и направляющей системы.
И наоборот, выдвигание штока упомянутого приводного силового цилиндра приводит в опусканию упомянутой системы и блокирует следящие ролики по наклону в положении зацепления за направляющий рельс с некоторым его обжатием.
В соответствии со вторым способом реализации предлагаемого изобретения, схематически представленным на фиг. 10 и 11, упомянутая приводная деталь представляет собой стержень наклона 43 с коническим концом, поступательное движение которого вперед или назад преобразуется в движение разведения или сближения правого 44 и левого 45 держателей следящих роликов.
Этот стержень управления наклоном 43 имеет примерно на середине своей длины диаметрально расположенный выступ 46.
Упомянутый стержень управления наклоном 43 шарнирно связан по вращению с концом штока приводного силового гидравлического цилиндра при помощи вилки 46, сквозь которую проходит нижняя ось поворота 11.
В этом варианте реализации собственно механический блок связи, обозначенный в целом позицией 48, служит опорой для держателя следящего ролика 44 с фиксированным наклоном. Он содержит на своей верхней грани шарнирное соединение 49, при помощи которого шарнирно присоединяется левый держатель следящего ролика 45 с изменяемым наклоном.
Ось поворота 33 держателей и, соответственно, следящих роликов, смещена в направлении вверх, выше детали управления наклоном 43 и левый держатель следящего ролика 45 с изменяемым наклоном имеет новую техническую или конструктивную форму маятникового типа. Пример практической реализации предлагаемого изобретения, схематически представленный на фиг. 10 и 11, показывает механический блок, поворачивающийся в направлении верх, с наклонной боковой поверхностью держателя следящего ролика и с продолжением вверх, пронизываемым верхней осью поворота.
Корпус левого держателя следящего ролика 45 содержит некоторый приемный объем, который действует по тому же принципу, в соответствии с которым преобразование поступательного движения в поворотное движение осуществляется в результате взаимодействия конической опорной поверхности или просто наклонной поверхности с подвижным управляющим элементом в толкающем контакте в виду осуществления сближения держателей следящих роликов 44 и 45 и освобождения этих роликов при обратном движении.
Упомянутый выше диаметральный выступ 46 образует специальный упор между передними 50 и задними 51 поверхностями верхнего ложемента 52, который определяет ход управления упомянутой приводной детали. Дополнительное втягивание штока приводного силового цилиндра вызывает подъем путем поворота шарнирной системы 13.
Поперечный профиль упомянутых выше следящих роликов имеет канавку 53, охватывающую выступ 54 направляющего рельса 34, по которому он должен следовать.
Для этой цели можно использовать направляющий рельс треугольной формы, круглой формы, рельс с поперечным сечением в виде сердечника или рельс другого сечения, подошва которого 55 установлена на звукопоглощающей прокладке на дне канавки 56 прямолинейных предварительно изготовленных элементов типа желоба 57, в котором располагается направляющий рельс.
Конструкция каждого из следящих роликов является одинаковой. В данном случае речь идет о составной конструкции, образованной осью качения 58, жестко связанной с каждым из держателей упомянутых следящих роликов, и на которой смонтирована с возможностью вращения втулка 59 при помощи подшипника качения 60.
В периферийной канавке втулки 59 установлено внешнее кольцо качения. Это кольцо смонтировано на обводе 63 при помощи уплотнения 62 из упругого материала, например, из эластомера, образованного двумя толстыми коническими шайбами 64 и 65, располагающимися в форме буквы V и служащими в качестве промежуточных деформируемых элементов, позволяющих за счет своей деформации обеспечить возможность небольших перемещений, поглощающих функциональные зазоры, а также демпфирующие боковые смещения на поворотах.
Эти кольца из эластичного материала обеспечивают также полную вибрационную изоляцию, а также электрическую изоляцию.
Таким образом, реализована система зацепления двух следящих роликов за направляющий рельс, которая может автоматически блокироваться, например, при помощи поддержания под небольшим давлением приводного силового цилиндра.
Формы реализации и технические функции позволяют приводному силовому цилиндру автоматически освобождать расхождение следящих роликов в ходе первой фазы движения подъема рычага и обеспечивать их сближение, а затем и обжатие направляющего рельса в конце движения опускания рычага.
Путеочистительный кронштейн 21, установленный перед следящими роликами для их защиты от возможных препятствий на пути следования, образован искривленным рычагом 66, на конце которого установлена поперечная горизонтальная пластина 67, располагающая точно над направляющим рельсом. В данном случае речь идет о кронштейне, который входит неотъемлемой частью в шарнирную деформируемую систему. Он убирается вместе с ней при помощи подъема этой системы.
Усовершенствованный рычаг автоматического управления по направлению движения наземного транспортного средства вдоль направляющего рельса имеет в целом конструкцию шарнирной рамки. На концевом элементе этой конструкции располагается пара следящих роликов, установленных под углом друг к другу в форме буквы V и шарнирно связанных между собой по повороту относительно некоторой фиксированной оси. Эти ролики приводятся в движение при помощи устройства управления, содержащего деталь управления наклоном, связанную шарнирно с приводным силовым цилиндром. Этот силовой цилиндр управляет наклоном роликов и качанием относительно горизонтальной оси упомянутого рычага, а также устройством автоматического управления наклоном роликов при подъеме и опускании рычага. Примененяется в системах автоматического управления по направлению движения вдоль направляющего рельса средств общественного городского транспорта и обеспечивает усовершенствование существующих конструкций. 14 з.п. ф-лы, 11 ил.
| EP 0062370 A, 13.10.82 | |||
| US 3724584 A, 03.04.73 | |||
| Устройство для поворота уборочной автомашины в углах ледяной площадки (катка), обнесенной бортами | 1959 |
|
SU142543A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ АЛЮМИНИЕВЫХ ИСПАРИТЕЛЕЙ ДЛЯ ХОЛОДИЛЬНИКОВ | 1986 |
|
SU1455512A1 |

