Текст описания в факсимильном виде (см. графическую часть)и
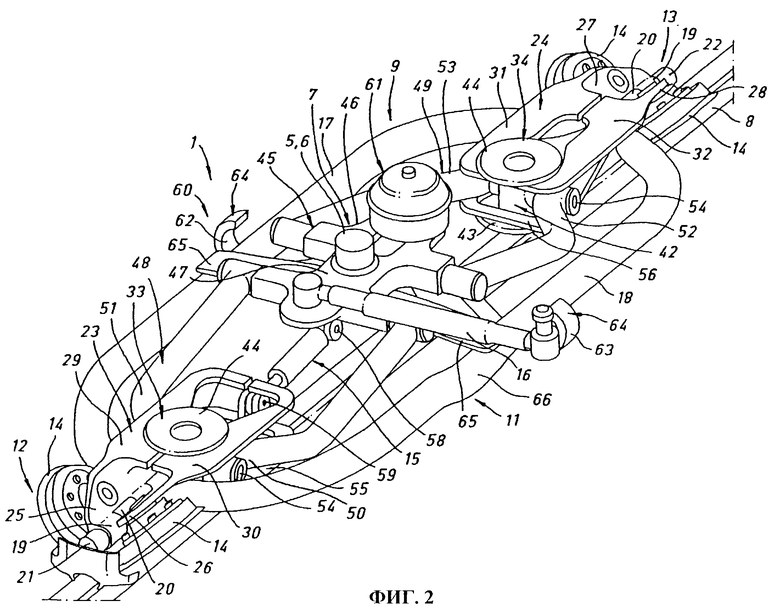
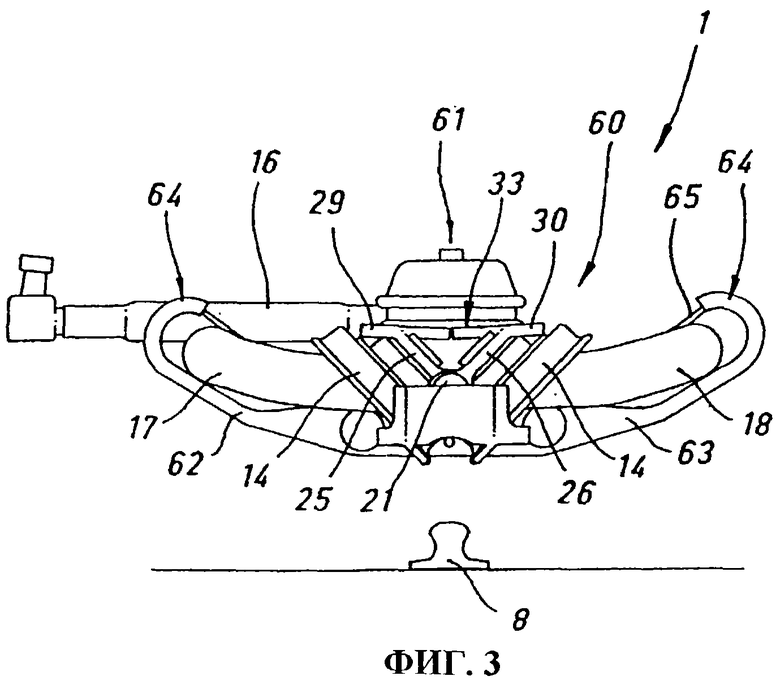
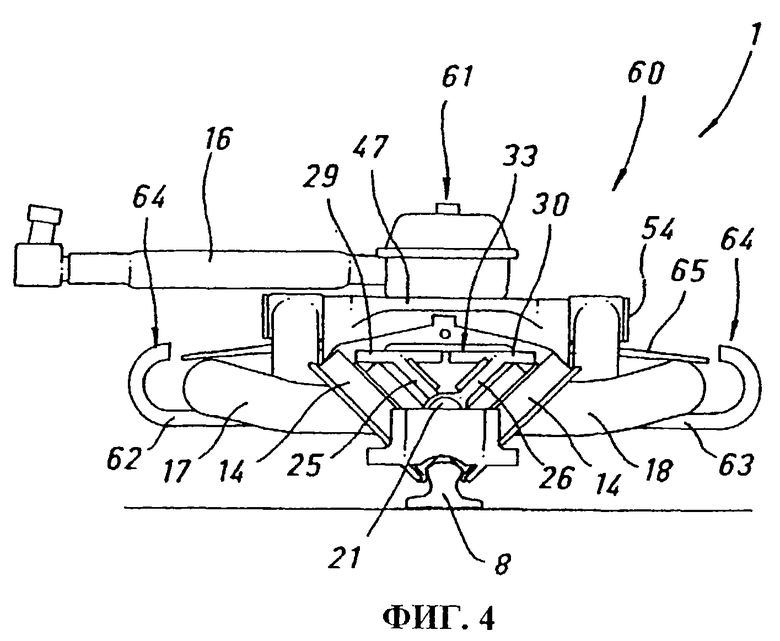
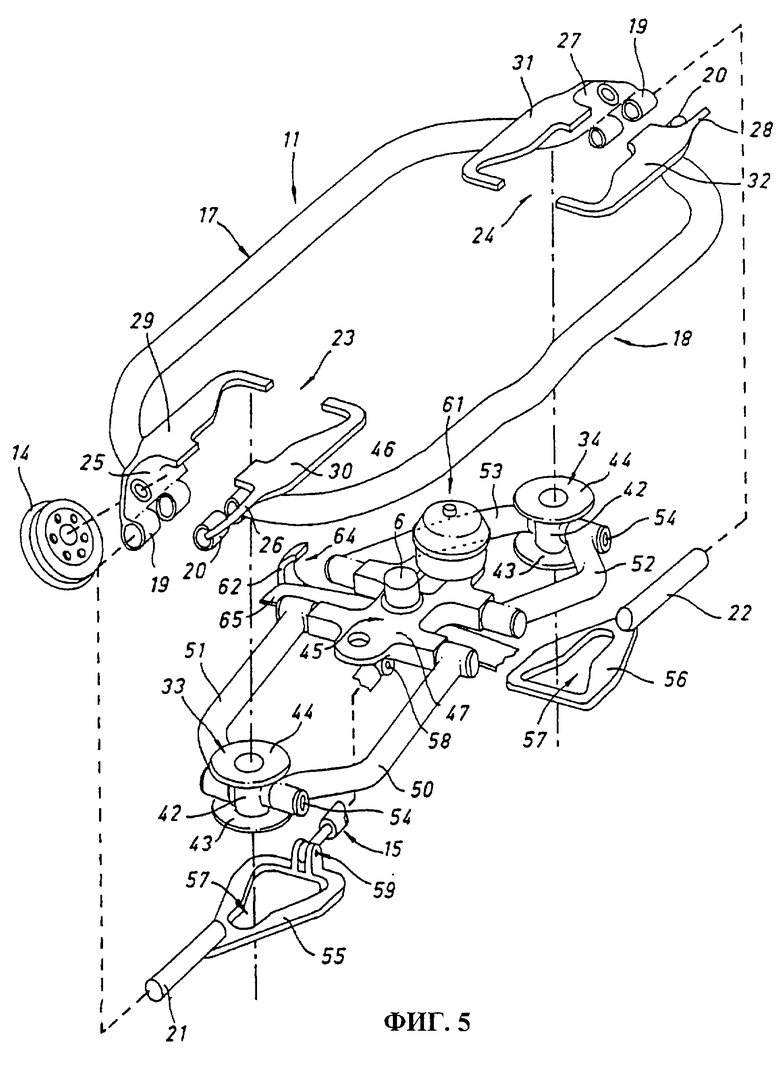
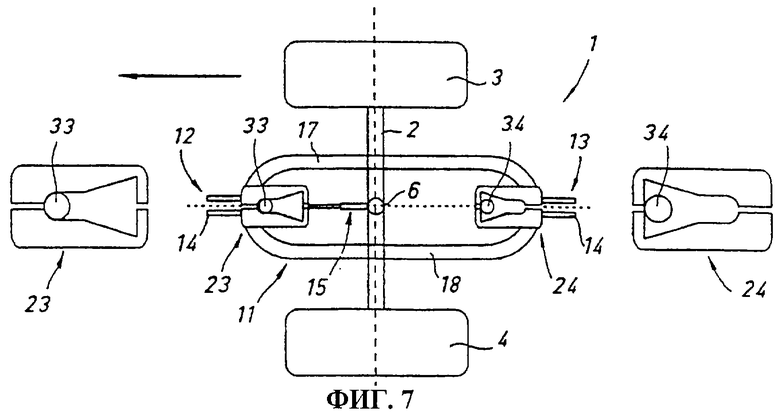
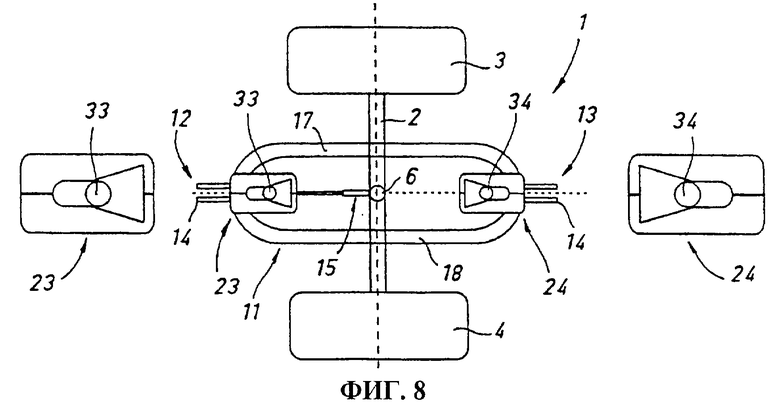
Изобретение относится к системам управления транспортными средствами. Система содержит опорную раму (11), образованную двумя ветвями (17, 18), шарнирно соединенными между собой с возможностью поворота вокруг двух концевых осей (21, 22). На каждой из ветвей установлены два наклонных направляющих ролика (14), движущихся вдоль направляющего рельса (8). Опорная рама (11) имеет возможность перемещаться в продольном направлении по отношению к колесной оси транспортного средства, обеспечивая при этом реверсирование направления автоматически управляемого движения, под действием силового привода (15) реверсирования. Опорная рама (11) имеет возможность подъема после освобождения направляющих роликов (14) от зацепления с направляющим рельсом (8) при помощи механизма подъема, воздействующего на рычаги опорной рамы. Колесная ось является автоматически управляемой по направлению движения при помощи подсистемы (9), управляемой при помощи опорной рамы (11). Управляемая подсистема (9) обеспечивает возможность отклонения в поперечном направлении сзади вокруг точки поворота, расположенной в непосредственной близости от передних направляющих роликов. Предложенная возможность реверсирования выгодна для конструкторов транспортных средств, движение которых управляется при помощи направляющего рельса. Технический результат заключается в предотвращении схода роликов системы управления с направляющего рельса при движении. 19 з.п.ф-лы, 12 ил.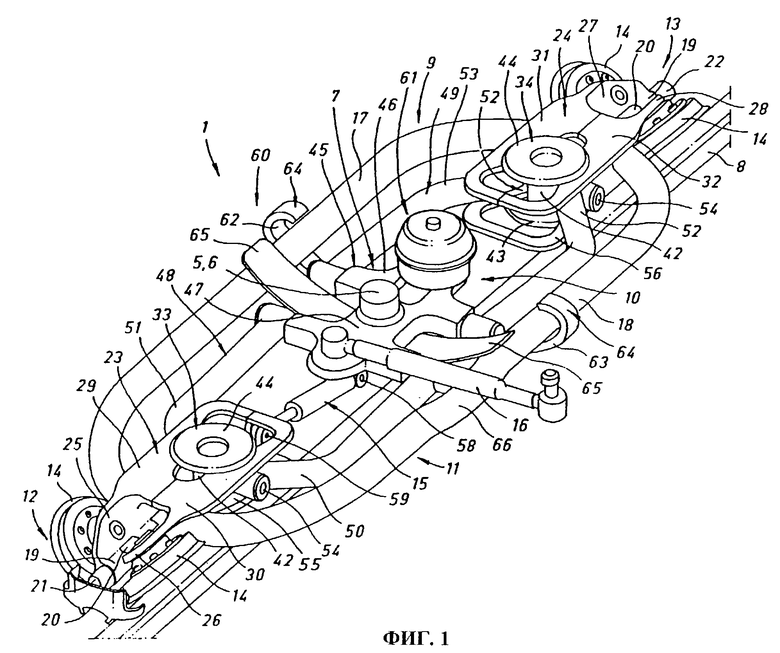
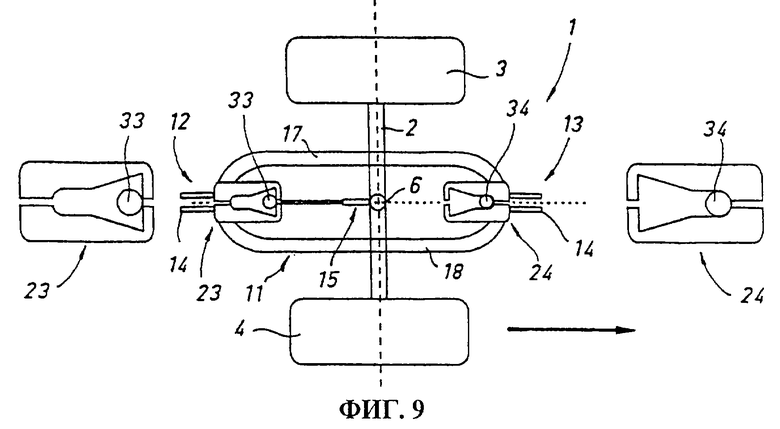
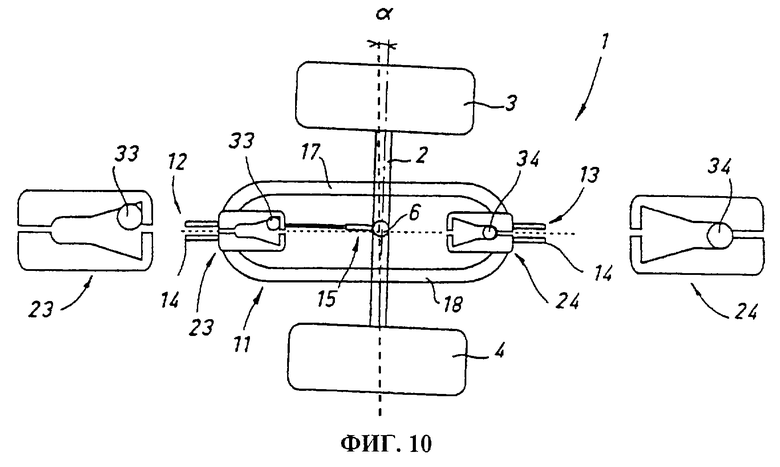
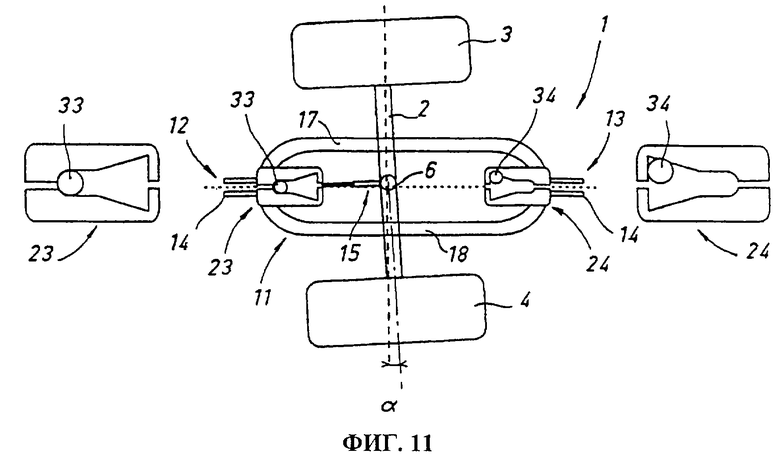
1. Двунаправленная система управления движением вдоль направляющего рельса (8) с ограничением бокового заноса для колесной оси (2) транспортного средства, содержащая две пары направляющих роликов (14), в каждой из которых два ролика наклонены V-образно, установленных по одну и по другую стороны от колесной оси (2) и катящихся вдоль одного и того же направляющего рельса (8), отличающаяся тем, что содержит следующие функциональные модули: управляемую подсистему (10), образованную центральным блоком (7) колесной оси, установленным на колесной оси (2) автодорожного транспортного средства и ориентирующим эту колесную ось (2) или управляемые колеса этой оси в соответствии с автоматическим управлением по направлению движения вдоль направляющего рельса (8), и которая может отклоняться в поперечном направлении сзади вокруг точки поворота, расположенной в окрестности передних роликов, управляющую подсистему (9), образованную конструкцией в виде опорной рамы (11), содержащей два противоположных конца по одну и по другую стороны от колесной оси, каждый из концов оборудован парой направляющих роликов (14), находящихся в зацеплении с направляющим рельсом (8), при этом управляющая подсистема (9) имеет возможность продольного перемещения по отношению к оси (2), двойную связь, соединяющую посредством шарниров и с возможностью перемещения в продольном направлении транспортного средства каждый из концов опорной рамы (11) с управляемой подсистемой (10), при этом перемещение управляющей подсистемы (9) позволяет обеспечить переход двунаправленной системы управления движением из первого положения в режиме автоматического управления с боковым отклонением колесной оси (2) в одном направлении движения транспортного средства во второе положение в режиме автоматического управления с боковым отклонением колесной оси (2) в противоположном направлении движения транспортного средства с переходом через центральное положение при остановленном транспортном средстве.2. Двунаправленная система управления движением по п.1, отличающаяся тем, что центральное положение, через которое проходит управляющая подсистема (9), представляет собой нейтральное положение, в котором направляющие ролики (14) освобождены от зацепления за направляющий рельс (8), и позволяет обеспечить подъем двунаправленной системы управления и управление транспортным средством в ручном режиме.3. Двунаправленная система управления движением по п.1, отличающаяся тем, что опорная рама (11) образована двумя ветвями (17) и (18), шарнирно связанными между собою с возможностью поворота друг относительно друга вокруг продольной оси, параллельной продольной оси транспортного средства.4. Двунаправленная система управления движением по п.1 или 2, отличающаяся тем, что двойная связь обеспечивает соединение каждого из концов опорной рамы (11) с каждым из концов управляемой подсистемы (10) при помощи составного шарнирного соединения с подвижной частью, позволяющего для каждого из них при помощи перемещения, продольного для транспортного средства, опорной рамы (11) по отношению к колесной оси (2), находиться поочередно в положении поворотной оси или в положении поперечного углового отклонения для режима автоматического управления, проходя при этом через незадействованное в автоматическом управлении состояние, соответствующее центральному положению.5. Двунаправленная система управления движением по п.4, отличающаяся тем, что соединительные части, связывающие центральный блок (7) колесной оси с каждым из концов опорной рамы (11), представляют собой поворотные рычаги (48) и (49), ветви которых шарнирно соединены с возможностью поворота вокруг концов поперечных конструкций центрального блока (7) колесной оси и вокруг оси, поперечной по отношению к подвижной детали разведения управляемой подсистемы (10).6. Двунаправленная система управления движением по п.4 или 5, отличающаяся тем, что каждая из двойной связи представляет собой шарнирное соединение, объединяющее подвижную деталь (33) или (34) разведения управляемой подсистемы (9) и подвижную опору, расположенную продольно по отношению к транспортному средству и образующую верхнюю часть каждого из концов управляющей подсистемы (9).7. Двунаправленная система управления движением по п.6, отличающаяся тем, что каждый из концов ветвей (17) и (18) опорной рамы (11) образует единую моноблочную деталь, выполняющую три функции: функцию держателя роликов, функцию поворотного шарнирного соединения ветвей (17) и (18) между собой и функцию подвижной опоры направления и скольжения для каждой подвижной детали разведения управляемой подсистемы (10).8. Двунаправленная система управления движением по п.3 или 4, отличающаяся тем, что нижние концы каждой ветви (17) и (18) опорной рамы (11) выполнены в виде шарнирных конструкций (19) и (20), причем шарнирные конструкции двух расположенных друг против друга концов ветвей вложены друг в друга для формирования гнезда для оси поворота ветвей друг относительно друга.9. Двунаправленная система управления движением по п.7 или 8, отличающаяся тем, что шарнирная конструкция (19) или (20) каждого конца каждой ветви продолжена в направлении вверх кронштейном крепления направляющих роликов, причем оба расположенных друг против друга кронштейна наклонены таким образом, чтобы сформировать V-образную конструкцию с вершиной, направленной вниз.10. Двунаправленная система управления движением по любому из пп.6-8, отличающаяся тем, что кронштейны верхних частей концов каждой ветви представляют собой полупластины (29-32) с концом в виде крюка, расположенные встык боковыми сторонами и имеющие возможность наклоняться, сближаясь друг с другом или удаляясь друг от друга при повороте в направлении вниз или в направлении вверх ветвей опорной рамы (11), что обеспечивает возможность перемещения направляющих роликов друг по отношению к другу.11. Двунаправленная система управления движением по п.10, отличающаяся тем, что две идентичные полупластины с концом в виде крюка образуют при боковом сближении опорные пластины (23) или (24), каждая из которых выполняет функцию подвижной в продольном направлении опоры для соответствующей концевой детали управляемой подсистемы (10).12. Двунаправленная система управления движением по п.11, отличающаяся тем, что опорные пластины (23) и (24) образуют при расположении встык боковыми сторонами соответствующих полупластин (29-32) подвижную опору с центральным вырезом, имеющим грушевидный профиль, образованный последовательным расположением большого и малого отверстий, разделенных входной зоной, в направлении которой сходятся края большого отверстия.13. Двунаправленная система управления движением по любому из пп.6, 11 и 12, отличающаяся тем, что каждая подвижная деталь (33), (34) разведения управляемой подсистемы (10) сформирована цилиндрической центральной частью (42), завершающейся двумя концевыми фланцами (43), (44) и выполняющей функцию устройства разведения для двух полупластин (29-32), а также функцию оси поворота для автоматического управления движением в случае, когда они расположены в малом отверстии выреза, и обеспечивает возможность бокового отклонения в случае, когда они расположены в большом отверстии, при этом наружный диаметр центральной цилиндрической части (42) подвижных деталей разведения или устройств разведения превышает ширину малого отверстия.14. Двунаправленная система управления движением по п.1, отличающаяся тем, что центральный блок (7) колесной оси представляет собой сдвоенную крестовину (45), имеющую два поперечных элемента, разделенных центральным штырем (6), обеспечивающим взаимодействие с колесной осью (2), и рычаг (16) автоматического рулевого управления.15. Двунаправленная система управления движением по п.1, отличающаяся тем, что управляющая подсистема (9) обеспечивает возможность подъема.16. Двунаправленная система управления движением по п.15, отличающаяся тем, что управляющая подсистема (9) обеспечивает возможность подъема при помощи механизма подъема, жестко связанного с центральным блоком (7) колесной оси и содержащего систему из двух поворотных рычагов подъема, приводимых в движение при помощи центрального приводного средства.17. Двунаправленная система управления движением по п.1, отличающаяся тем, что упругое усилие обеспечивает постоянную нагрузку в направлении вниз на направляющие ролики.18. Двунаправленная система управления движением по п.17, отличающаяся тем, что средство, обеспечивающее упругое возвратное усилие, действующее в направлении вниз, представляет собой гибкую поперечную пластину (65), концы которой размещены на ветвях (17) и (18) опорной рамы (11).19. Двунаправленная система управления движением по п.17, отличающаяся тем, что средство, обеспечивающее упругое возвратное усилие, представляет собой продольную гибкую пластину (67), опирающуюся своими концами (68) и (69) на верхние фланцы деталей (33) и (34) разведения.20. Двунаправленная система управления движением по любому из пп.1 или 3, отличающаяся тем, что опорная рама представляет собой жесткую раму с неподвижными ветвями (17) и (18).