Изобретение касается шарнирно сочлененного транспортного средства, состоящего из последовательности нескольких модулей, соединенных между собой при помощи составной шарнирной связи, имеющей в своем составе по меньшей мере одно шарнирное соединение с контролируемым перемещением.
Развитие автомобильного транспорта, в частности, грузового и пассажирского автомобильного транспорта, осуществляющего перевозки в городских или пригородных условиях, повлекло за собой нарастающую потребность в наличии транспортных средств достаточно большой вместимости.
Однако, такие транспортные средства должны также отвечать требованиям всех установленных законом правил дорожного движения, в частности, требованиям относительно размеров эксплуатируемых транспортных средств, а также обладать необходимой маневренностью, требуемой конкретными условиями эксплуатации этих транспортных средств в городах и пригородах.
Соединение нескольких взаимно шарнирно сочлененных модулей, образующих автопоезд, предоставляет значительные преимущества, в частности, в том, что касается общей длины такого транспортного средства, образованного идентичными или разными модулями относительно малой длины, а также удобства управления таким транспортным средством, особенно на закруглениях дорог.
Сказанное выше в особенности справедливо для транспортных средств, используемых в городах и принужденных достаточно часто двигаться по узким и извилистым магистралям, содержащим как горизонтальные, так и вертикальные кривые.
Однако, создание автопоездов из шарнирно связанных между собой модулей представляет значительные трудности как на стадии их проектирования, так и на стадии практической реализации, причем упомянутые трудности возрастают по мере увеличения числа модулей в данном автопоезде.
Относительное положение колесных пар или мостов данного транспортного средства на прямых участках дороги, а также на виражах, должно быть контролируемым для того, чтобы исключить возможные смещения или отклонения траектории движения этих колесных пар, их проскальзывание, явления колебаний или выезда из колеи отдельных модулей данного автопоезда, в частности, модулей, находящихся в середине этого автопоезда или в самом его конце.
Другая проблема создания подобных транспортных средств связана с существующими неровностями автодорог, например, с наличием на них горбов или локальных выпуклостей, уклонов и наклонов дороги на поворотах, а также локализованных оседаний или углублений дорожного покрытия. Относительное положение модулей данного автопоезда также должно быть контролируемым при движении такого транспортного средства в упомянутых выше условиях.
Для достижения этой цели применяются различные известные устройства контроля относительного положения модулей шарнирно сочлененного транспортного средства и его колесных пар или мостов. Однако, сразу следует отметить, что устройства, в которых используются гидравлические силовые цилиндры или домкраты другого типа, а также автоматизированное управление с использованием электронных устройств, являются слишком дорогостоящими и сложными в изготовлении и техническом обслуживании.
В настоящее время существуют чисто механические устройства контроля относительного положения модулей шарнирно сочлененного транспортного средства или устройства с переменной геометрией, такие, например, как устройство, описанное в патенте США US 5052707, относящемся к устройству с шарнирными траверсами, предназначенному для контроля положения промежуточного модуля перехода между двумя другими частями шарнирно сочлененного транспортного средства.
Однако, это устройство, содержащее несколько деформируемых параллелограммов, установленных в верхнем положении, оказывается весьма громоздким. Кроме того, применение этого устройства требует, чтобы конструкция конца по меньшей мере одного из модульных элементов была асимметричной. Следствием этого является снижение степени модульности и сложности в практической реализации.
В то же время, в заявке на европейский патент EP-0519813 описывается механическое устройство связи для шарнирно сочлененного транспортного средства на уровне межмодульного перехода, образованное косыми тягами, связанными при помощи соединительных элементов, образующих деформируемый параллелограмм в верхней части данного транспортного средства.
Описанное выше устройство предусматривает контроль положения межмодульного перехода только при движении данного транспортного средства по горизонтальным кривым дорожного полотна. Основная функция этого устройства ограничивается обеспечением центрирования верхней части промежуточного элемента, расположенного между двумя транспортными модулями.
Известно транспортное средство, образованное несколькими модулями, шарнирно соединенными между собой, состоящее из по меньшей мере одного головного модуля, снабженного передним мостом направляющих колес, одного хвостового модуля, снабженного задним колесным мостом, связанными между собой непосредственно или при помощи по меньшей мере одного промежуточного модуля, при этом два располагающихся друг за другом модуля соединены между собой посредством шарнирного соединения, состоящего из подвижной опоры шарнира, располагающейся на колесной оси и соединенной с каждым из примыкающих модулей при помощи шарнира или с тремя степенями свободы, каждый из которых расположен в среднем положении на каждой из поперечных сторон концов каждого модуля (см. патент FR N 2549436).
Цель предлагаемого изобретения состоит в том, чтобы устранить эти недостатки в заявляемой конструкции транспортного средства, шарнирно сочлененного чисто механическим образом, позволяющей удовлетворительно поддерживать относительное положение составляющих это транспортное средство модулей, почти идеально проходить закругления и неровности дороги, а также существенно ограничить паразитные взаимные перемещения модулей даже для автопоездов, состоящих из двух и более модулей.
Для достижения этой цели в соответствии с данным изобретением предлагается конструкция шарнирно сочлененного транспортного средства, содержащего несколько модулей, соединенных между собой составной шарнирной связью с подвижной опорой шарнирного соединения, снабженной колесами и с косой связью, причем передний оконечный или крайний модуль содержит направляющие колеса, а крайний задний модуль содержит задний мост, колеса которого неподвижны по направлению или могут свободно поворачиваться по направлению.
В конструкции данного транспортного средства каждая подвижная опора шарнирного соединения связана с одним из модулей при помощи связи с тремя степенями свободы и с другим модулем при помощи двойной связи, образованной нижней связью с тремя степенями свободы и верхней связью, образованной упругой связью с контролируемым перемещением.
Данное изобретение обеспечивает многочисленные преимущества в области простоты конструкции, себестоимости изготовления этой конструкции, надежности в эксплуатации, эффективности решения поставленных задач и других характеристик.
Предлагаемая конструкция особенно хорошо показывает себя применительно к общественному городскому пассажирскому транспорту, поскольку она позволяет обеспечить движение транспортных средств большой длины без потери маневренности.
В частности, конструкция шарнирно сочлененного транспортного средства в соответствии с предлагаемым изобретением обеспечивает заметное улучшение поведения такого транспортного средства в продольной плоскости и в поперечной плоскости, соответствующей кренению этого транспортного средства.
Предлагаемое устройство шарнирного сочленения позволяет сделать данное транспортное средство в целом практически изостатическим, что существенно снижает динамические нагрузки, воздействующие на конструкцию.
Другие технические характеристики и существенные преимущества предлагаемого изобретения будут показаны в приведенном ниже описании примера его практической реализации, сопровождаемом ссылками на приведенные в приложении фигуры, среди которых:
- фиг. 1, на которой представлен общий схематический перспективный вид шарнирно сочлененного транспортного средства, состоящего из трех модулей, причем на показанной фигуре выделены только те органы и элементы, которые имеют отношение к предлагаемому изобретению непосредственно;
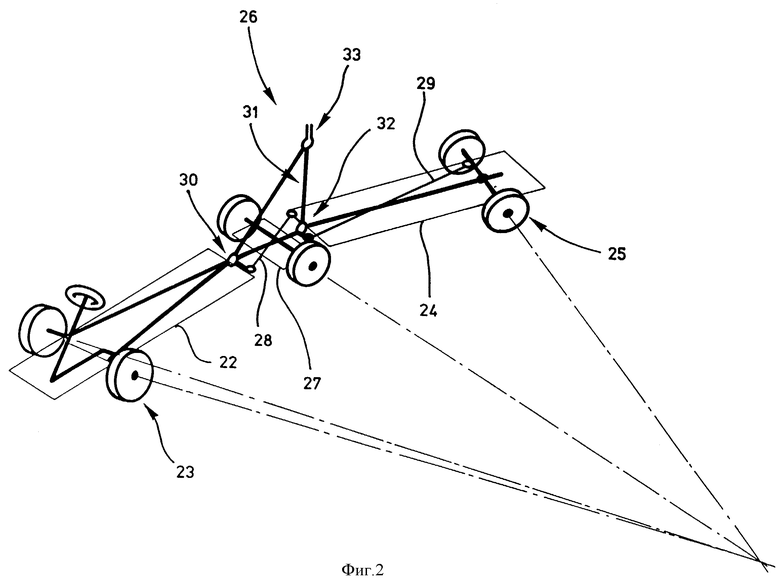
- фиг. 2, на которой представлен схематический вид, идентичный виду, показанному на фиг. 1, но относящейся к варианту реализации предлагаемого транспортного средства в соответствии с изобретением, состоящего из двух модулей;
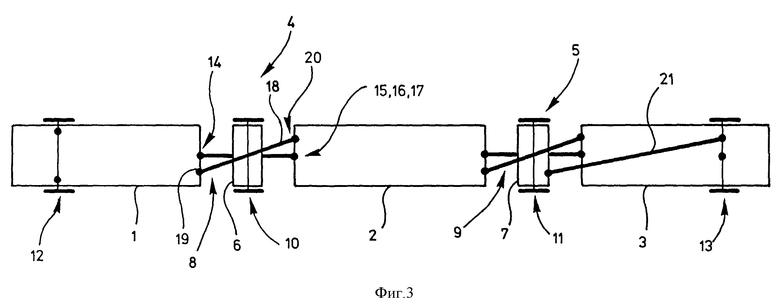
- фиг. 3, на которой представлен схематический вид в плане шарнирно сочлененного транспортного средства в положении, когда все составляющие его модули располагаются по одной прямой линии;
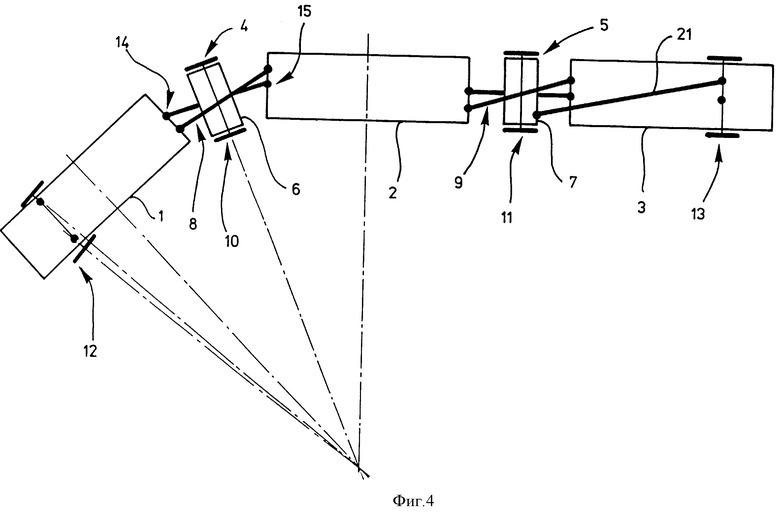
- фиг. 4, на которой представлен схематический вид в плане шарнирно сочлененного транспортного средства в момент начала поворота в горизонтальной плоскости;
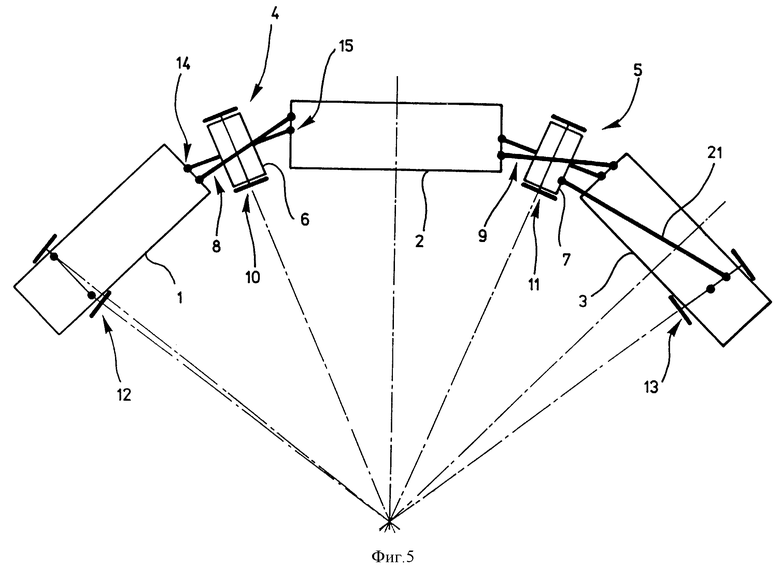
- фиг. 5, на которой представлен схематический вид в плане предлагаемого транспортного средства с шарнирным сочленением трех модулей в процессе выполнения поворота;
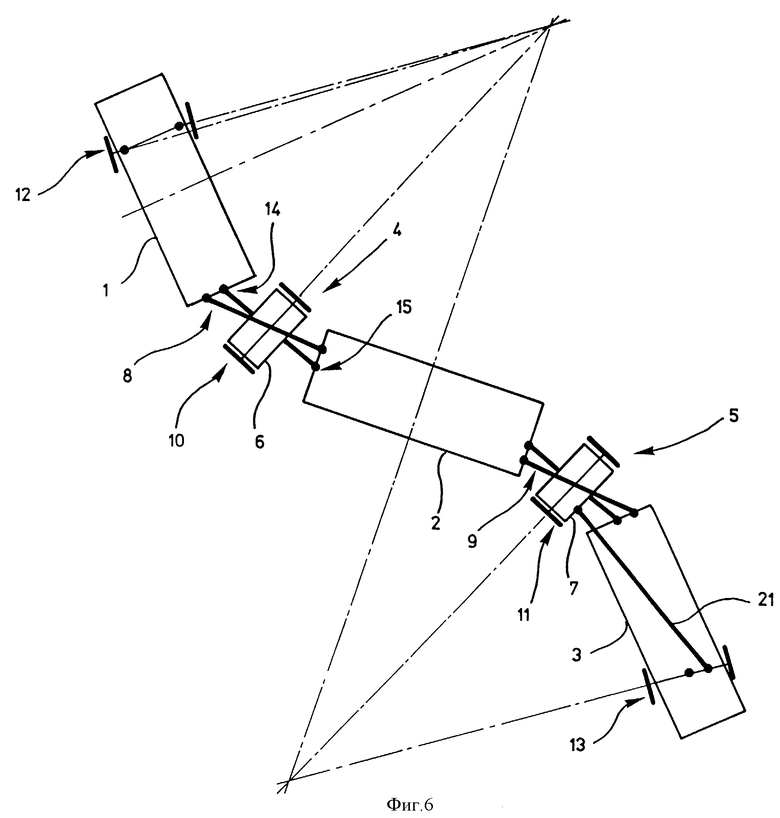
- фиг. 6, на которой представлен схематический вид в плане предлагаемого транспортного средства, состоящего из трех шарнирно сочлененных модулей в процессе преодоления S-образного виража;
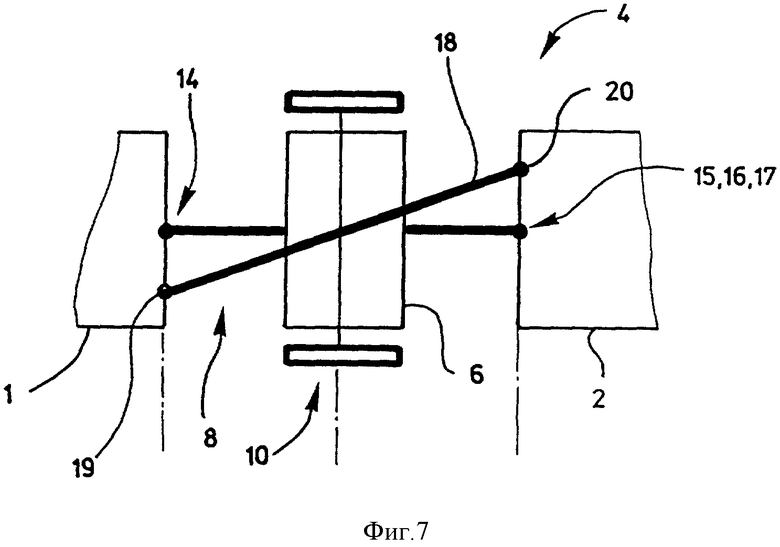
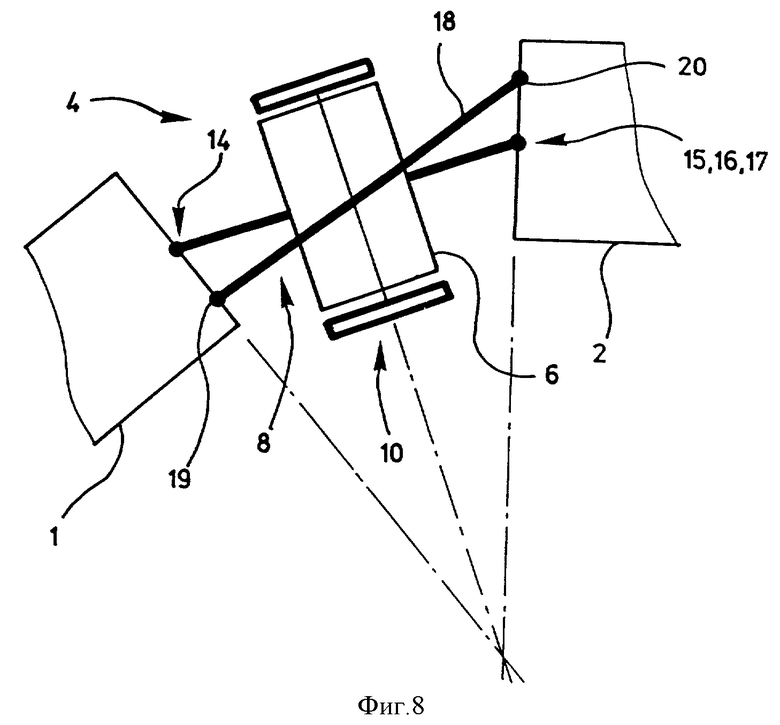
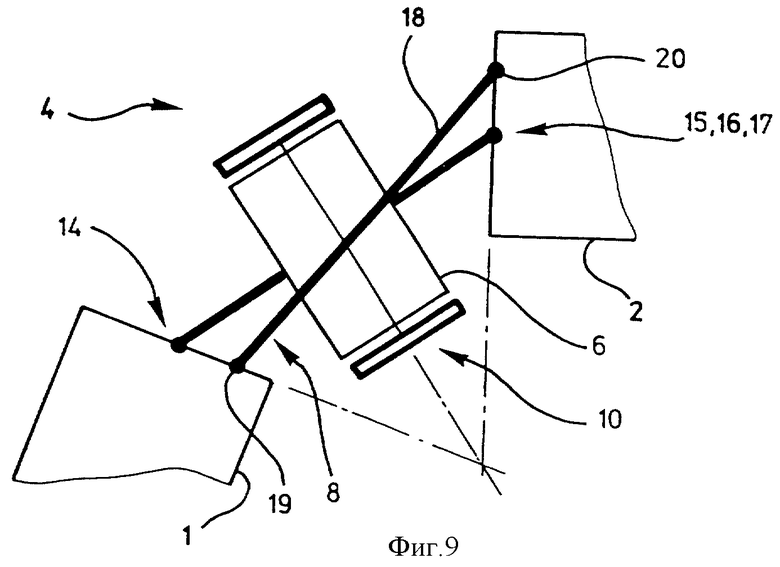
- фиг. 7, 8 и 9, на которых представлены схематические детализированные виды сверху составного элемента связи между двумя последовательно расположенными модулями соответственно на прямолинейном участке дороги, на плавном повороте и на более крутом повороте;
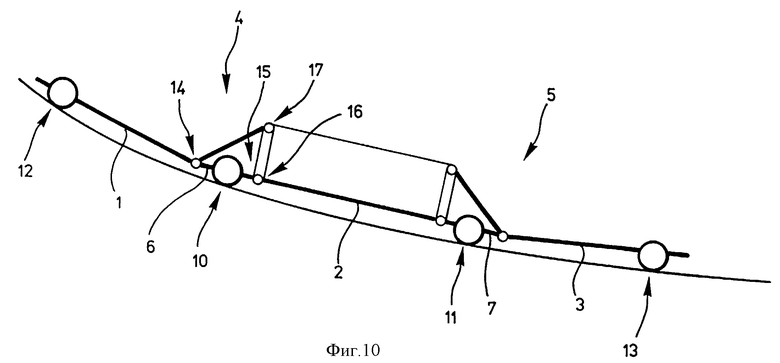
- фиг. 10, на которой представлен схематический вид в профиль предлагаемого транспортного средства, преодолевающего участок дороги с вертикальной кривизной.
Общая идея данного изобретения состоит в соединении модулей шарнирно сочлененного транспортного средства при помощи составных шарнирных связей, каждая из которых образована подвижной опорой шарнирного соединения, располагающейся на колесной оси, и дополнительной связью, образованной косой тягой, причем каждая подвижная опора шарнирного соединения соединена с одним из модулей при помощи связи с тремя степенями свободы, а с другим модулем эта опора шарнирного соединения связана при помощи двойного шарнирного соединения, нижний шарнир которого представляет собой шарнир с тремя степенями свободы, а верхний шарнир представляет собой, например, упругий шарнир с контролируемым перемещением.
Таким образом, каждая опора шарнирного соединения соединена шарнирным образом, с одной стороны, с одним из примыкающих к ней модулей при помощи шарнира типа шарового, а с другой стороны, эта опора соединена с другим примыкающим к ней модулем при помощи двойного шарнирного соединения, образующего обратный рычаг с маятниковым движением ограниченной амплитуды.
В соответствии с предпочтительным вариантом реализации каждая или по меньшей мере одна из двух подвижных опор шарнирного соединения располагается на ведущей оси данного транспортного средства. Тогда в этом варианте реализации вся толкающая сила, приводящая в движение данное транспортное средство, исходит от ведущих осей, на которых располагаются подвижные опоры шарнирного соединения или сочленения.
Пример практической реализации шарнирно сочлененного транспортного средства в соответствии с предлагаемым изобретением, состоящего из трех модулей, схематически представлен в перспективном виде на фиг. 1.
Эта фиг. 1 иллюстрирует базовую версию реализации данного изобретения, которая распространяется как на шарнирно сочлененное транспортное средство, состоящее из двух модулей, так и на транспортное средство, в котором шарнирно соединены между собой больше трех модулей.
Представленное схематически на фиг. 1 транспортное средство состоит из головного модуля 1, промежуточного модуля 2 и хвостового модуля 3. Эти модули соединены между собой шарнирным образом при помощи двойных составных связей 4 и 5, образованных, с одной стороны, подвижной опорой шарнирного соединения 6 или 7, а с другой стороны, косой шарнирной связью 8 или 9.
Каждая подвижная опора шарнирного соединения 6 или 7 располагается на колесной оси или колесной паре 10 или 11 с фиксированным направлением колес по отношению к данному корпусу или раме подвижной опоры шарнирного соединения.
Головной модуль 1 данного транспортного средства снабжен передним мостом направляющих колес 12, а его хвостовой модуль 3 содержит мост фиксированных по направлению или свободно поворачивающихся колес 13 в своей задней части. Этот колесный мост может быть ориентируемым в плоскости дороги, как это показано на фиг. 1, при помощи отслеживания положения примыкающей к нему подвижной опоры шарнирного соединения, обеспечиваемого с помощью специальной шарнирной передаточной связи.
В упрощенном варианте практической реализации этот задний мост хвостового модуля данного транспортного средства может также быть неподвижным относительно его рамы.
Шарнирные связи 4 или 5 между последовательно расположенными модулями предлагаемого транспортного средства подобны друг другу и они будут оставаться подобными друг другу также и в том случае, когда данное транспортное средство будет иметь в своем составе большее число модулей. Вследствие этого обстоятельства можно ограничиться описанием составной шарнирной связи 4, существующей между головным модулем 1 и промежуточным модулем 2.
Передняя подвижная опора шарнирного соединения 6 модулей данного транспортного средства, взятая в качестве примера, соединена с головным модулем 1 в соответствии с представлением в направлении спереди назад при помощи единственного переднего соединительного шарнира 14, имеющего три степени свободы. В качестве такого шарнира может быть использован, например, шаровой шарнир или карданный шарнир. Со следующим модулем, которым в данном случае является промежуточный модуль 2, упомянутая подвижная опора соединена задней двойной шарнирной связью 15, реализующей в целом функцию вертикальной обратной колеблющейся оси, то есть оси, свободной в маятниковых колебаниях. Это заднее двойное шарнирное соединение 15 образовано нижним шарниром 16 типа шарового шарнира или карданного шарнира с горизонтально расположенной главной осью и верхним упругим шарниром 17 с контролируемым перемещением, предназначенным для восприятия всех усилий, связанных или возникающих вследствие движений данного транспортного средства относительно его продольной оси (движения по крену) и поперечной оси (движения в продольной плоскости), а также комбинации упомянутых движений в процессе следования данного транспортного средства реальному профилю дороги, по которой ему приходится двигаться.
Таким образом, эта упомянутая выше общая ось представляет колебательные отклонения, позволяющие поглотить амплитуды креновых и продольных колебаний, связанных с изменениями формы дорожного покрытия и с движениями корпусов модулей данного транспортного средства в процессе его движения по дороге.
С другой стороны, подвижная опора шарнирного соединения дублирована косой шарнирной связью, выполненной в форме косой приводной тяги 18, шарнирно связанной одним из своих концов 19 с рамой предшествующего модуля, а другим своим концом 20 шарнирно связанной с рамой последующего модуля. Эти соединения осуществляются в двух точках, располагающихся друг против друга и смещенных симметрично по отношению к общей центральной продольной оси последовательно расположенных модулей данного транспортного средства в том случае, когда это транспортное средство располагается на прямолинейном участке дороги, то есть упомянутые модули выровнены по прямой линии. Упомянутая выше косая приводная тяга 18 смонтирован на концах рам упомянутых выше модулей при помощи всенаправленных шарниров, например, шаровых шарниров или карданных шарниров.
Упомянутые выше шарнирные связи образуют совокупность шарниров, располагающихся в вершинах треугольника, как это наглядно показано на приведенных в приложении фигурах. На этих фигурах вершины треугольников, образованных упомянутыми шарнирными связями, размещаются со стороны промежуточного модуля 2. Само собой разумеется, что предлагаемое изобретение нисколько не зависит от данного типа конфигурации, но, напротив того, в равной степени соответствует обеим возможностям ориентации этого треугольника, а именно, шарнирная вершина треугольника связей может располагаться как на головном модуле данного транспортного средства, так и на следующем за ним модуле.
В частности, двойная шарнирная связь 15 может существовать в передней части каждого последующего модуля, в том числе, в передней части последнего или хвостового модуля данного шарнирно сочлененного транспортного средства.
Как можно констатировать на основании схематических видов, приведенных на первых нескольких фигурах, подвижные опоры шарнирного соединения или сочленения 6 в передней части данного транспортного средства и 7 в его задней части (для транспортного средства в соответствии с предлагаемым изобретением, состоящего из трех модулей) реализуют своеобразный эквивалент сочленения при помощи карданного шарнира или связи с использованием шарового шарнира в том случае, если абстрагироваться от отклонений подвижных элементов данного транспортного средства от исходного положения по крену и в продольной плоскости. Таким образом, два следующих друг за другом модуля соединены между собой при помощи шарнирной связи, выступающей в качестве эквивалента двух перекрещивающихся тяг.
Как показано в качестве примера на фиг. 1, двойная шарнирная связь 15, реализующая функцию обратной или обращенной маятниковой оси, используется на каждом из двух концов промежуточного модуля 2 данного транспортного средства, содержащего всего три шарнирно сочлененных модуля, и при том обратным образом. Действительно, передняя подвижная опора шарнирного соединения или сочленения 6 имеет единственный шарнир 14, обращенный в направлении вперед, и двойную шарнирную связь 15, обращенную в направлении назад, тогда как задняя подвижная опора шарнирного соединения или сочленения 7 характеризуется обратной ориентацией упомянутых выше шарниров и шарнирных связей.
Будучи представленной в качестве иллюстративного примера, такое расположение или такая ориентация элементов транспортного средства в соответствии с предлагаемым изобретением не имеют никакого обязательного характера.
Таким образом, предлагаемое изобретение дает возможность практически реализовать шарнирно сочлененную систему модулей, состоящую из пяти элементов, среди которых три функциональных модуля данного транспортного средства и две подвижных опоры шарнирных соединений, которая представляет собой теоретически совершенный эквивалент шарнирно сочлененной системы, состоящей из трех функциональных элементов.
В случае необходимости можно предусмотреть на верхнем конце, располагающемся против единственного шарнира 14, хотя это и не обязательно, некоторую амортизирующую связь, образованную, например, двумя амортизаторами V-образного расположения.
Составная шарнирная связь 4 или 5 между различными модулями данного шарнирного сочлененного транспортного средства в соответствии с предлагаемым изобретением имеет следующую особенность. При прохождении упомянутым транспортным средством кривой дорожного полотна, располагающейся в горизонтальной плоскости, на среднюю поперечную ось каждой подвижной опоры шарнирного соединения налагается обязательная необходимость соответствовать постоянно биссектрисе угла, образованного двумя располагающимися друг за другом модулями, связь между которыми осуществляется при помощи упомянутой подвижной опоры.
Это обстоятельство соответствует формированию наиболее предпочтительной геометрии изгибающегося шарнирно сочлененного транспортного средства в случае преодоления этим транспортным средством закруглений дороги, поскольку прямые линии, проходящие через колесные оси данного транспортного средства, или их геометрические эквиваленты, в процессе виража проходят через некоторый мгновенный центр вращения.
При прохождении данным транспортным средством вертикальной кривой дорожного полотна, располагающейся в продольном направлении данной дороги, например, при переходе от горизонтального участка дороги к спуску или подъему, относительный поворот осуществляется между предшествующим модулем или последующим модулем и подвижным основанием шарнирного соединения, примыкающим к двум этим модулям, при помощи единственного шарнира 14, который представляет собой шарнир шарового типа.
Паразитные движения по крену модулей данного транспортного средства в процессе движения поглощаются нижними шарнирными соединениями и верхними шарнирными соединениями упомянутых подвижных опор шарнирного соединения или сочленения.
Возникающие в процессе движения данного транспортного средства по дороге колебания по всем трем осям каждого промежуточного модуля воспринимаются по меньшей мере одним упругим шарнирным соединением 17 с контролируемым перемещением, располагающимся в верхней части сочленения.
Объединение этого упомянутого выше упругого шарнира 17 в верхней части данного транспортного средства и противостоящего ему шарового шарнира 16 в нижней части этого транспортного средства позволяет обеспечить такое положение, при котором главные усилия нагрузки данного транспортного средства и усилия, возникающие вследствие вертикальных ускорений, а также усилия растяжения этого транспортного средства и воздействующие на него усилия торможения, будут передаваться посредством нижней шарнирной связи. Шарнирное соединение типа поворотной оси между данным модулем и связанной с ним подвижной опорой шарнирного соединения или сочленения является свободным по вращению в горизонтальной плоскости. При этом другие вторичные по своей значимости движения элементов данного транспортного средства контролируются верхней упругой шарнирной связью, предназначенной для восприятия механических усилий, возникающих вследствие кренения данного транспортного средства в процессе его движения по реальной дороге или в процессе преодоления этим транспортным средством продольных уклонов дороги.
В варианте практической реализации предлагаемого транспортного средства, в соответствии с которым хвостовой модуль оснащен ориентируемой свободно или принудительно задней осью колесного моста 13, этот мост устанавливается на хвостовом модуле с возможностью поворота. Привод этого заднего поворотного моста образован шарнирной связью, например, косой тягой 21, шарнирно связанной, с одной стороны, с упомянутой поворотной колесной задней осью 13, а с другой стороны, с задней подвижной опорой шарнирного соединения или сочленения 7, причем две упомянутые выше точки шарнирного соединения отстоят симметрично, то есть на одинаковые расстояния от общей продольной оси данного транспортного средства в том случае, когда все составляющие это транспортное средство модули установлены вдоль одной прямой линии. Упомянутая выше косая тяга смонтирована своими концами в шарнирных соединениях с тремя степенями свободы типа шаровых шарниров.
Само собой разумеется, что могут быть предусмотрены и другие средства управления задней поворотной колесной осью по направлению качения ее колес.
На фиг. 3, 4, 5, 6, 7 и 8 представлены относительные положения подвижных опор шарнирных соединений и модулей, составляющих данное транспортное средство, в различных конфигурациях, которые могут возникнуть в процессе преодоления этим транспортным средством различных участков дороги.
Упомянутые выше фигуры ясно показывают те возможности, которыми обладает предлагаемое шарнирно сочлененное транспортное средство в процессе следования по заданной траектории, соответствующей реальному профилю и конфигурации дорожного полотна. Эти возможности соответствуют модульной концепции данного транспортного средства и шарнирным связям между составляющими это транспортное средство модулями в соответствии с предлагаемым изобретением. Как видно на приведенных в приложении фигурах, траектория движения каждого модуля предлагаемого транспортного средства весьма точно повторяет траекторию движения предыдущего модуля этого шарнирно сочлененного транспортного средства.
Само собой разумеется, что предлагаемое изобретение, описанное на конкретном примере практической реализации шарнирно сочлененного транспортного средства, состоящего из трех модулей, вполне применимо и для транспортных средств, имеющих в своем составе большее число упомянутых модулей, а также для транспортных средств, имеющих в своем составе только два модуля, как это схематически показано на фиг. 2.
Головной модуль 22 шарнирно сочлененного транспортного средства в соответствии с предлагаемым изобретением содержит передний мост направляющих колес 23, а хвостовой модуль такого транспортного средства 24 содержит задний ориентируемый колесный мост 25, как это в целом описано выше.
Эти упомянутые выше модули соединены между собой при помощи единственной или единой составной шарнирной связи 26, в которой используется единственная подвижная опора шарнирного соединения 27, как она была описана выше, и косой шарнирной связи, реализованной в виде косой тяги 28. Приводная тяга 29 шарнирного соединения заднего ориентируемого колесного моста 25 соединена с упомянутым единым или единственным подвижным опорным элементом упомянутого шарнирного соединения 27.
Единая опора шарнирного соединения 27 соединена с головным или передним модулем 22 при помощи единственной шарнирной связи, реализованной в виде шарового шарнира 30. Эта подвижная опора связана также с задним по отношению к упомянутому головному модулем 24 при помощи двойной шарнирной связи 31, образованной, с одной стороны, нижним шарниром шарового типа 32 и, с другой стороны, верхним упругим шарниром 33 с контролируемым перемещением.
Таким образом, можно получить эквивалент шарнирного сочлененного транспортного средства, имеющего в своем составе два изостатических модуля, кроме случая, соответствующего поворотам элементов данного транспортного средства в горизонтальной плоскости.
Изобретение применимо для средств городского пассажирского и грузового транспорта. Сущность изобретения: шарнирно сочлененное транспортное средство имеет в своем составе несколько модулей, соединенных между собой шарнирным образом. При этом в состав данного транспортного средства входит головной модуль с передним мостом направляющих колес, хвостовой модуль с задним ориентируемым в пространстве управляемым колесным мостом и, в случае необходимости, один или несколько промежуточных модулей. В конструкции данного шарнирно сочлененного транспортного средства два следующих друг за другом модуля соединены посредством подвижной опоры шарнирного соединения, оборудованной колесной осью и дублированной жесткой косой шарнирной связью. При этом ориентация каждой подвижной опоры шарнирного соединения и ориентация заднего подвижного колесного моста связаны между собой таким образом, чтобы средняя поперечная ось этой подвижной опоры или ее колесного моста постоянно совпадала с биссектрисой угла, образованного продольными осями двух примыкающих друг к другу модулей. Изобретение позволяет поддерживать относительное положение составляющих модулей при поворотах и неровностях дороги и ограничить взаимное перемещение модулей. 11 з.п.ф-лы, 10 ил.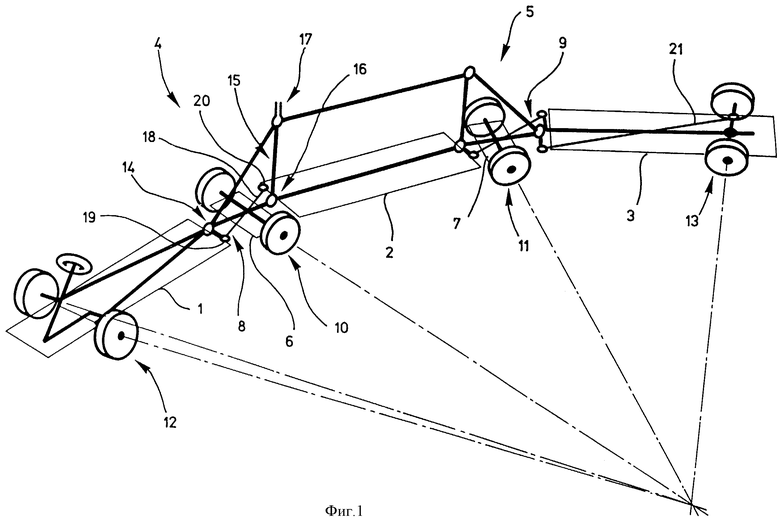
| СПОСОБ ЛЕЧЕНИЯ БОЛЬНЫХ ПЛЕЧЕЛОПАТОЧНЫМ ПЕРИАРТРОЗОМ | 2014 |
|
RU2549436C1 |
| Реле сопротивления с четырехугольной характеристикой срабатывания | 1972 |
|
SU519813A1 |
| Способ управления колесными осями автопоезда | 1973 |
|
SU521175A1 |
| Система управления колесными осями автопоезда | 1974 |
|
SU521176A1 |
| Устройство управления колесами прицепа транспортного средства | 1981 |
|
SU1049322A1 |
| Модульная управляемая тележка транспортных элементов автопоезда | 1985 |
|
SU1281470A1 |
