Изобретение относится к электротехнике и радиотехнике.
Техническим результатом изобретения является устройство с неподвижным статором и ротором, перемещающимся линейно относительно статора, причем скорость и величина перемещения задаются внешним управляющим сигналом.
Изобретение может найти применение в различных электромеханических приводах, где требуется линейное перемещение, например робото-технике, дистанционной автоматике, испытаниях и т.д.
Прототипом данного устройства является хорошо известный соленоид. При подаче на обмотку постоянного напряжения ток, протекающий через обмотку, создает электромагнитное поле, под действием которого сердечник (из магнитного материала) будет втягиваться внутрь соленоида. Если в качестве сердечника использовать магнит, то в зависимости от создаваемого электромагнитного поля сердечник будет втягиваться или выталкиваться из соленоида. Прототип имеет два устойчивых состояния с трудно предсказуемым промежуточным положением сердечника, что является его недостатком, ограничивающим применение.
Известен электропривод [3], содержащий электромагнитный двигатель возвратно-поступательного движения, содержащий магнитопровод с катушками прямого и обратного хода, якорь установленный в направляющих, емкостный датчик положения якоря, включенный в цепь синусоидального автогенератора, преобразователь частота-напряжение, компаратор, дифференцирующую цепь и систему управления тиристорными преобразователями, включающими катушки прямого и обратного хода двигателя. Устройство предназначено для забивки свай, дробления негабаритов, разрушения мерзлого грунта и т.д., то есть для тех устройств, где требуется значение или определение конечных значений положения перемещения якоря.
Недостатком данного устройства является сложность в управлении для получения произвольной скорости и величины перемещения якоря. Устройство сложное, с ограниченными возможностями.
Технический результат - устранение указанных недостатков.
Поставленный технический результат достигается следующим образом.
Линейный электродвигатель содержит статор, внутри которого находится ротор, выполненный в виде электромагнита, питающегося током одного направления, датчик перемещения, включенный в цепь автогенератора, выполненного так, что его частота связана с положением статора относительно ротора. Ротор выполнен в виде электромагнита. Введены опорный автогенератор, выполненный с возможностью управления его частотой током или напряжением в пределах изменения частоты автогенератора, частотно-фазовый детектор, выполненный с возможностью сравнения частот обоих автогенераторов, первые два выхода которого подключаются к импульсным усилителям, питающим обмотку статора, третий выход, на котором всегда генерируется импульсная последовательность при неравенстве частот входных сигналов, подключен к импульсному усилителю, питающему обмотку электромагнита сердечника.
В качестве сердечника (ротора) двигателя применен электромагнит, обмотка которого питается током одного направления. Создаваемое сердечником магнитное поле будет пропорционально току, протекающему через его обмотку. Между ротором и статором устанавливается датчик, параметры которого изменяются в зависимости от положения ротора относительно статора. Здесь в качестве датчика применен конденсатор, одна пластина которого соединена с ротором, а другая - со статором. Когда ротор находится внутри статора, емкость конденсатора максимальна, когда максимально выдвинут, емкость минимальна. Обмотка статора подключается к цепи схемы управления, которая под воздействием управляющего напряжения и напряжения источника питания может изменять в обмотке статора ток на противоположный, что равносильно изменению полюсов электромагнита статора. Таким образом созданы условия для втягивания, выталкивания статора и контроля его местоположения с помощью емкостного датчика.
Емкостный датчик включен в цепь зависимого автогенератора схемы управления двигателем. Частота автогенератора однозначно связана с местоположением статора относительно ротора через датчик.
В качестве сигнала управления двигателем используется ток или напряжение, подаваемые на управляющий вход второго независимого опорного автогенератора, частота которого под воздействием управляющего напряжения или тока изменяется в пределах изменения частоты зависимого автогенератора.
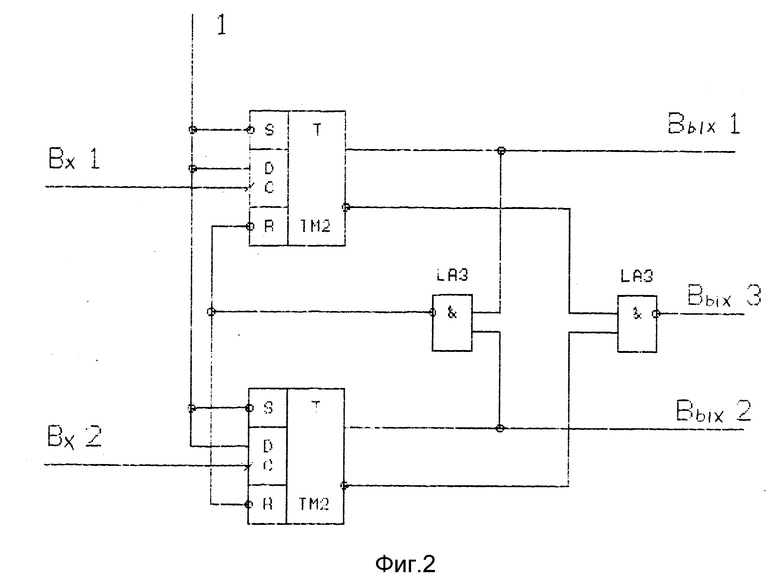
Напряжения с выходов обоих автогенераторов подаются на входы сравнивающего устройства, роль которого выполняет известный частотно-фазовый детектор [1, 2], работающий по фронтам входных сигналов (фиг. 1). Выходы 1, 2 детектора подключаются к импульсным усилителям, питающим обмотку статора двигателя, а выход 3 - к импульсному усилителю, питающему обмотку ротора.
Детектор работает таким образом, что при равенстве фаз выходных сигналов на выходах его появляются остроконечные, с длительностью, определяемой быстродействием примененных схем, импульсы, которые не оказывают никакого воздействия на ток в обмотках двигателя, т.е. ток, потребляемый двигателем, равен нулю. При разных частотах генераторов детектор на одном из выходов 1 или 2, а также на выходе 3 генерирует импульсную последовательность, которой начинает питаться обмотка ротора и определенным образом обмотка статора, которая создает такое электромагнитное поле при взаимодействии с полем ротора, что ротор будет перемещаться в направлении, при котором частота зависимого генератора будет стремиться с точностью до фазы к частоте опорного генератора. Остаточный фазовый сдвиг или фазовая ошибка в установившемся режиме может достигать ± 2π (характеристика данного частотно-фазового детектора), что зависит от силы, противодействующей ротору, выполнить его работу по перемещению.
Если считать, что управитель (перемещающийся ротор) является безынерционным элементом, то время переходного процесса может достигать до [2] четырех периодов частоты сравнения. В данном случае время переходного процесса будет определяться инерционностью перемещения ротора.
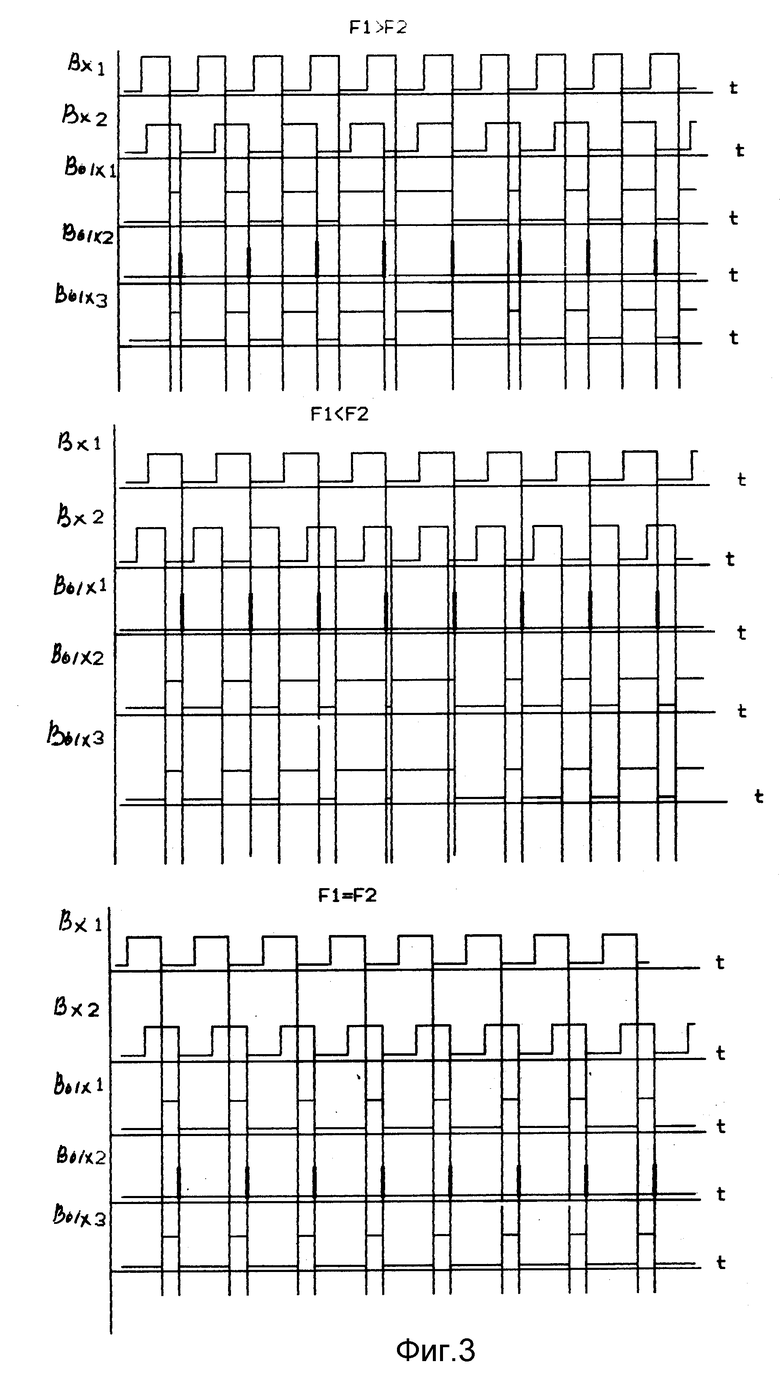
Частотно-фазовый детектор состоит из двух D-триггеров, одного элемента совпадения, устанавливающего триггеры в исходное состояние, и элемента ИЛИ, собирающего информацию с выходов триггеров. Работа частотно-фазового детектора поясняется диаграммами входных и выходных сигналов, приведенных на фиг. 2 и 3.
Детектор работает следующим образом. Предположим вх.1 подключен к зависимому автогенератору с частотой F1, а вх.2 подключен к опорному автогенератору с частотой F2.
При F1 > F2 первым изменит свое состояние верхний триггер, на вых.1 появится "1", затем сигналом от опорного генератора с частотой F2 изменит свое состояние нижний триггер и на вых.2 появится тоже "1", но ее существование очень мало и будет определяться быстродействием примененных схем, т.к. через элемент совпадения И оба триггера будут переброшены в исходное состояние. В результате действия этих сигналов на вых.1 образуется импульсная последовательность, а на вых. 2 - сигнал, равный "0", ток в обмотке статора (соленоида) будет протекать через импульсный усилитель от вых.1 к вых.2, создавая соответствующие полюса статора, та же самая последовательность будет выделена на вых.3 и через импульсный усилитель будет питать обмотку ротора или якоря двигателя, создавая определенные полюса на концах якоря. Якорь будет втягиваться или выталкиваться, совершая работу и стремясь уравнять частоту зависимого автогенератора с опорным.
При F1 < F2 импульсная последовательность появится на вых.2, изменив тем самым ток в обмотке статора на противоположный, и соответственно изменятся его полюса, полюса же ротора не изменятся и двигатель выполнит работу по перемещению, якорь будет выталкиваться или втягиваться.
При F1 = F2 и уменьшении сопротивления движению якоря фаза зависимого генератора будет стремиться к фазе опорного генератора с уменьшением токов в обмотках ротора и статора.
Таким образом, закон изменения частоты опорного генератора под действием управляющего напряжения или тока будет соответствовать такому же закону перемещения ротора при условии идентичности модуляционных характеристик обоих генераторов.
Литература
1. Манассевич В. Синтезаторы частот. Теория и проектирование.- М.: Связь, 1979.
2. Галин А.С. Диапазонно-кварцевая стабилизация СВЧ.- М.: Связь, 1976.
3. Авторское свидетельство СССР N 991557, кл. H 02 K 33/12, 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты для электро-МАшиННыХ пРЕОбРАзОВАТЕлЕй | 1979 |
|
SU853763A1 |
| МОДУЛЯЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2303766C2 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| Весоизмерительное устройство | 1976 |
|
SU569863A1 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1970 |
|
SU279747A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2365025C1 |
Использование: в электротехнике, и радиотехнике. Сущность: в линейном двигателе с ротором в виде электромагнита используется емкостный датчик перемещения, включенный в цепь автогенератора. Частота спорного генератора регулируется внешним управляющим сигналом. Частоты автогенераторов сравниваются частотно-фазовым детектором, два выхода которого соединены со статорной обмоткой, а третий - с роторной. 3 ил.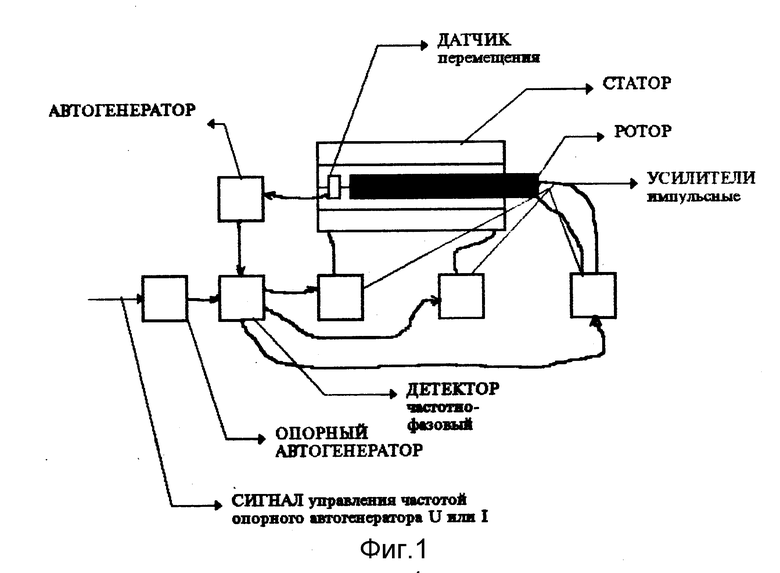
Линейный электродвигатель, содержащий статор, внутри которого находится ротор, датчик перемещения, который включен в цепь автогенератора, выполненного так, что его частота связана с положением ротора относительно статора, отличающийся тем, что ротор выполнен в виде электромагнита, питающегося током одного направления, и введены опорный автогенератор, выполненный с возможностью управления его частотой током или напряжением в пределах изменения частоты автогенератора, частотно-фазовый детектор, выполненный с возможностью сравнения частот обоих автогенераторов, первые два выхода которого подключены к импульсным усилителям, питающим обмотку статора, третий выход, на котором генерируется импульсная последовательность при неравенстве частот входных сигналов, подключен к импульсному усилителю, питающему обмотку электромагнита сердечника.
| SU, авторское свидетельство 991557, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
