Модуляционный гироскоп может быть использован в системах инерциального управления объектами.
Известен модуляционный гироскоп, содержащий ротор с неравными экваториальными моментами инерции, выполненный в виде параллелепипеда на упругом равножестком подвесе, помещенный в герметизированную, вакуумированную, вращающуюся вместе с ротором камеру, газодинамические сферические опоры, двигатель вентильного типа, датчик момента, вынесенные из вакуумированного объема, устройство съема информации, выполненное во вращающейся системе координат в виде емкостно-частотного преобразователя, и устройство управления ротором, включающее генератор внешнего возбуждения (ГВВ). В генератор конструктивно введена дополнительная третья размагничивающая статорная обмотка, на которую подается переменное напряжение, промодулированное по амплитуде (RU 2003116003 A, G01C 19/00).
При управлении ротором во вращающейся системе координат с помощью синусно-косинусного преобразователя (генератора с внешним возбуждением) статорное железо генератора намагничивается в момент прохождения по обмоткам статора тока управления датчиком момента. В этом случае помимо полезного сигнала в роторную обмотку трансформируется вредный сигнал вследствие намагниченности статора. При изменении тока управления в статорной обмотке намагниченность статора также меняется, что приводит к гистерезису статорной обмотки генератора с внешним возбуждением. В этом случае точность гироскопа снижается за счет возникновения тренда (накапливающего дрейфа), который присущ всем без исключения гироскопам.
Техническим результатом данного изобретения является повышение точности гироскопа за счет устранения тренда (медленного изменения точностного параметра со временем) путем устранения магнитного гистерезиса.
Указанный результат достигается тем, что в модуляционном гироскопе, содержащем ротор с неравными экваториальными моментами инерции, выполненном монолитным, в виде параллелепипеда на упругом равножестком подвесе с торсионами крестообразного сечения, помещенном в герметизированную, вакуумированную, вращающуюся вместе с ротором камеру, газодинамические сферические опоры, двигатель вентильного типа, датчик момента, вынесенное из вакуумированного объема устройство съема информации, выполненное во вращающейся системе координат в виде емкостно-частотного преобразователя, и устройство управления ротором гироскопа в виде синусно-косинусного преобразователя (генератора с внешним возбуждением), в генератор, помимо двух рабочих обмоток, введены еще две дополнительные обмотки, уложенные в те же самые пазы статора генератора, что и основные; причем на эти две дополнительные обмотки подается синусно-косинусное напряжение, промодулированное по амплитуде, в результате чего возникает переменное затухающее круговое магнитное поле.
На фиг.1 представлена конструкция модуляционного гироскопа. На фиг.2 показана блок-схема обработки информации с ротора гироскопа. На фиг.3 показана блок-схема управления ротором во вращающейся системе координат. На фиг.4 показана конструкция третьей размагничивающей обмотки статора гироскопа. На фиг.5 показан процесс появления переменного затухающего кругового магнитного поля при подаче на две дополнительные обмотки синусно-косинусного напряжения, промодулированного по амплитуде.
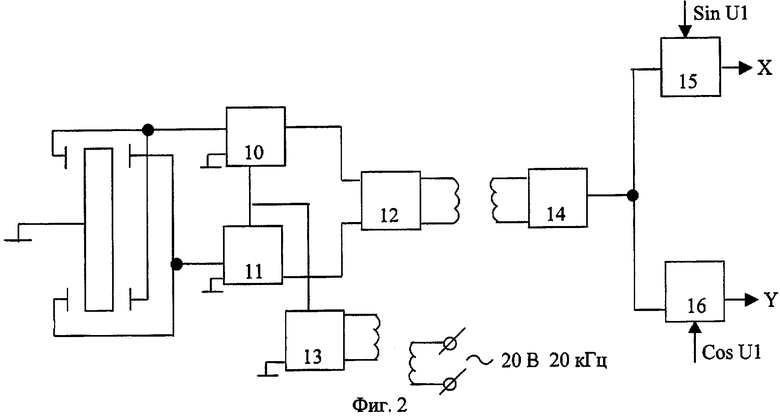
Ротор 1 (фиг.1), имеющий неравные экваториальные моменты инерции и равножесткий упругий подвес крестообразного профиля сечения торсионов с вырожденным промежуточным кольцом, помещен в вакуумированную, вращающуюся вместе с ротором камеру 2 в газодинамических сферических опорах (см. фиг.1). Вращение осуществляется с помощью торцевого вентильного электрического двигателя 3 с резонансной угловой скоростью Ω. Устройство съема информации с ротора выполнено во вращающейся вместе с ротором в системе координат в виде емкостного датчика угла 4, емкостно-частотного преобразователя (ЕЧП) 5, токоподвода-токосъема 6, служащего для запитки ЕЧП и съема информации с ротора. Генератор с внешним возбуждением (ГВВ) 7 вместе с двумя электронными диодами, конструктивно входящими в ЕЧП, и двумя электромагнитами 8 служит для управления ротором во вращающейся системе координат. Электромагнитные датчики момента гироскопа не чувствительны к знаку управления, поэтому на их входе стоят электронные диоды, которые одну половину синусоиды подают на один электромагнит, другую половину синусоиды - на другой. Генераторы опорных импульсов (ГОИ) 9 формируют опорное напряжение для разложения сигнала на две составляющие. Такой гироскоп имеет две оси чувствительности и может заменить собой два классических гироблока. Колебания ротора от действия входной угловой скорости или угла поворота основания в инерциальном пространстве преобразуются емкостным дифференциальным датчиком угла и емкостно-частотным преобразователем, включающим в себя два автогенератора 10 и 11 (фиг.2), смеситель 12, блок питания 13, в девитацию частоты 2Δf, идущей на частоте вращения ротора Ω. Девитация частоты передается с вращающейся части прибора на неподвижную с помощью индуктивного токосъема. Питание блока питания осуществляется через аналогичный индуктивный токоподвод, питающийся напряжением 20 В и частотой 20 кГц от автономного источника питания. Информация с токосъема поступает на вход частотного детектора 14 и далее на вход двух фазовых демодуляторов 15 и 16, опорным напряжением которых является импульсное напряжение sin u1 и cos u1, вырабатываемое двумя катушками генераторов опорных импульсов (ГОИ). С выходов фазовых демодуляторов поступает сигнал в виде постоянного тока или напряжения о двух составляющих входной угловой скорости или угла поворота гироскопа в инерциальном пространстве.
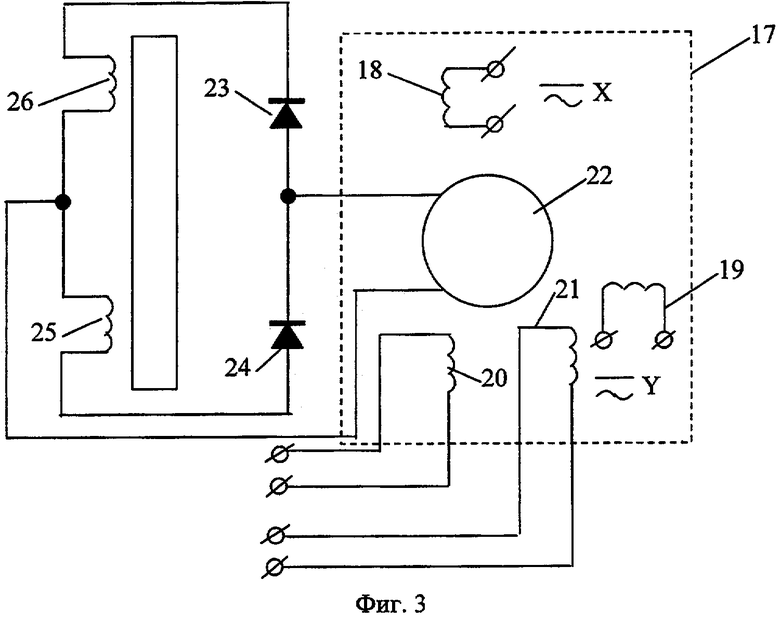
Блок-схема управления ротором (фиг.3) включает в себя синусно-косинусный преобразователь 17 (он же генератор с внешним возбуждением ГВВ), состоящий из четырех статорных обмоток 18, 19, 20, 21 и одной роторной обмотки 22, находящейся на вращающемся валу, двух электронных диодов 23 и 24 (условно показанных как диоды), конструктивно входящих в емкостно-частотный преобразователь, и двух электромагнитов 25 и 26, расположенных на вращающемся валу за стенкой герметизированной ампулы. При подаче управляющего постоянного или медленно меняющего сигнала на одну из статорных обмоток управления 18 или 19 при вращении ротора с резонансной скоростью Ω в роторной обмотке 22 наводится соответствующее (синусное или косинусное) напряжение, которое поступает на входы электронных диодов и далее к исполнительным электромагнитам, управляющих ротором. Две дополнительные обмотки 20 и 21, которые конструктивно уложены в те же самые пазы статора генератора, что и основные (18, 19), служат для снятия намагниченности статорного железа при прохождении тока по обеим обмоткам управления (18, 19). На две дополнительные обмотки (20, 21) подается переменное синусно-косинусное напряжение, промодулированное по амплитуде. В этом случае дополнительный, вредный сигнал в роторной обмотке, связанный с намагниченностью железа статора, не наводится.
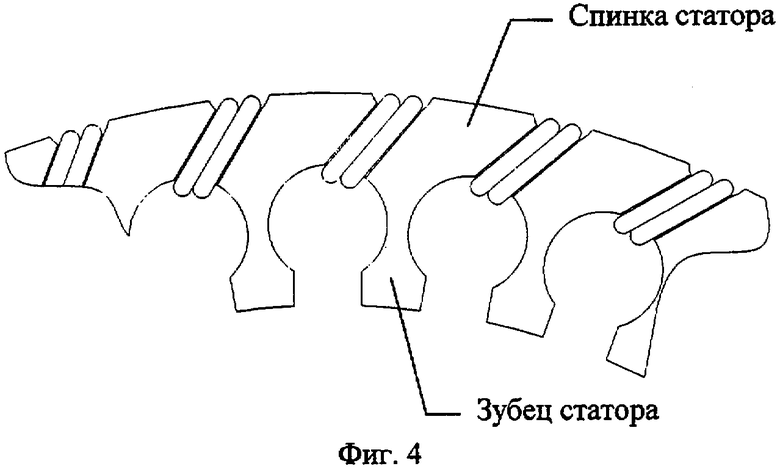
Ранее в конструкции гироскопа помимо двух рабочих обмоток использовалась третья дополнительная обмотка (она была непрерывно задействована в момент работы прибора), которая служила для снятия намагниченности статорного железа и устранения гистерезиса в генераторе при прохождении тока по обеим обмоткам управления. Использование третьей обмотки позволяло уменьшить величину гистерезиса и достичь величины дрейфа гироскопа 0,02 °/час. Указанная третья обмотка (фиг.4) была намотана на спинке статора генератора, перпендикулярно основным обмоткам и при подаче на нее переменного напряжения, промодулированного по амплитуде, размагничивала лишь спинку статора, причем зубцы статора оставались намагниченными.
В заявляемом изобретении в статоре генератора к двум основным обмоткам добавлены две дополнительные обмотки, причем уложенные в те же самые пазы, что и основные. При создании переменного затухающего кругового магнитного поля путем подачи синусно-косинусного напряжения, промодулированного по амплитуде, в эти дополнительные обмотки, удалось убрать величину гистерезиса в пересчете на уход до 0,005 °/час.
Укладка двух дополнительных обмоток в новой конструкции статора в те же самые пазы статора, что и две основные обмотки, позволила убрать намагниченность и зубцовой зоны статора.
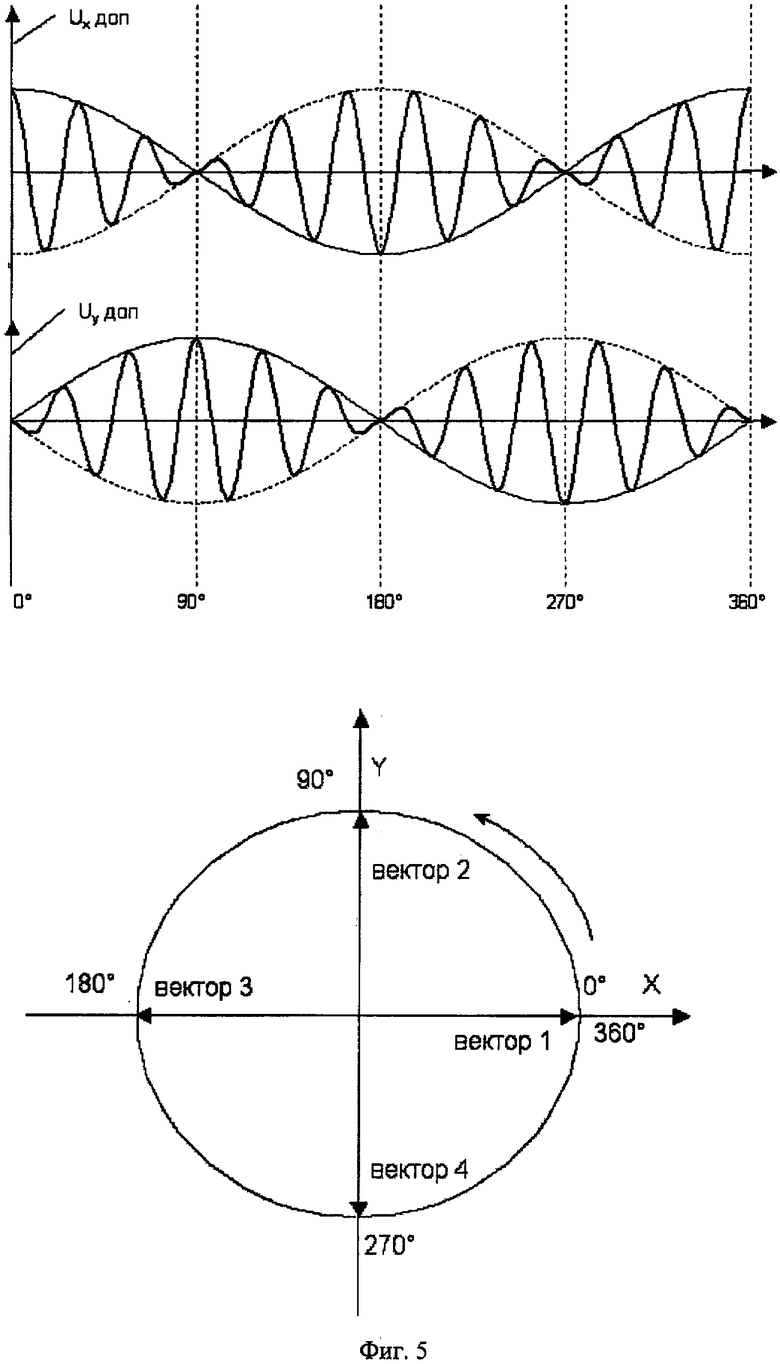
Рассмотрим процесс появления переменного затухающего кругового магнитного поля (фиг.5) при подаче в дополнительные обмотки синусного и косинусного напряжения постоянной частоты, например, 220±20 Гц; причем оба напряжения по амплитуде плавно нарастают до максимума и плавно снижаются до нуля с периодом 2÷5 секунд.
При прохождении синусного напряжения Удоп по дополнительной обмотке 21 (фиг.3) с затухающей амплитудой UYдоп, а по дополнительной обмотке 20 косинусного напряжения Хдоп с затухающей амплитудой UXдоп образуется круговое вращающееся магнитное поле, а именно:
- при нуле градусов (фиг.5) амплитуда в дополнительной Yдоп обмотке равна нулю, в то время как в Хдоп обмотке она максимальна. На векторной круговой диаграмме это вектор 1. При 90° амплитуда в Yдоп обмотке максимальна, в то время как в дополнительной Хдоп обмотке она равна нулю. На векторной диаграмме поля это вектор 2. При 180° амплитуда в обмотке Yдоп равна нулю, в то время как в обмотке Хдоп она равна максимуму со знаком минус, что соответствует на векторной круговой диаграмме поля (магнитного потока) вектору 3. При 270° амплитуда в обмотке Yдоп будет равна максимальному значению со знаком минус, в то время как в дополнительной обмотке Хдоп она будет равна нулю, т.е. получаем вектор 4. При 360° амплитуда в Yдоп обмотке будет равна нулю, в то время как в Хдоп обмотке будет максимальна.
Таким образом, получаем векторную круговую диаграмму последовательности векторов 1÷4, причем поле идет против часовой стрелки.
При размагничивании переменным, затухающим, круговым магнитным полем, кроме размагничивания спинки и зубцов статора, происходит размагничивание и ротора генератора, если такое намагничивание ротора от постоянного источника имело место.
Предлагаемая конструкция гироскопа позволяет решить проблему гистерезиса в статорной обмотке генератора с внешним возбуждением и, как следствие, проблему тренда.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| СПОСОБ ГЕРМЕТИЗАЦИИ АМПУЛЫ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2282838C2 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |
| СПОСОБ УСТРАНЕНИЯ ТРЕНДА В МОДУЛЯЦИОННОМ ГИРОСКОПЕ | 2003 |
|
RU2262074C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Устройство для контроля зенитных углов и положения отклонителя в скважине | 1983 |
|
SU1155733A1 |
| Электропривод | 1979 |
|
SU864476A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
Изобретение относится к гироскопии и может быть использовано в системах инерциального управления объектами. Введение в статор генератора двух дополнительных обмоток, на которые подается синусно-косинусное напряжение, промодулированное по амплитуде, и уложенных в те же самые пазы, что и основные обмотки, позволяет повысить точность гироскопа за счет размагничивания статора переменным затухающим круговым магнитным полем. 5 ил.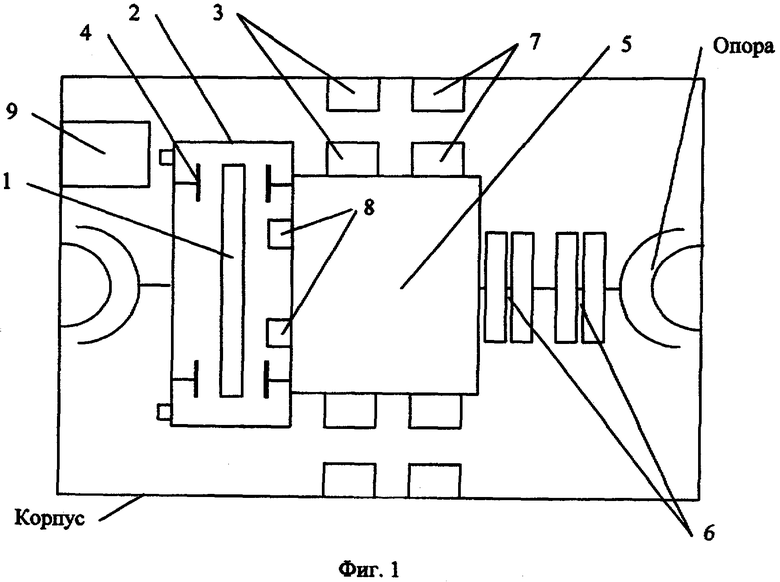
Модуляционный гироскоп, содержащий ротор с неравными экваториальными моментами инерции, выполненный в виде параллелепипеда на упругом равножестком подвесе, помещенный в герметизированную, вакуумированную, вращающуюся вместе с ротором камеру, газодинамические сферические опоры, двигатель вентильного типа, датчик момента, вынесенные из вакуумированного объема устройство съема информации с ротора, выполненное во вращающейся системе координат в виде емкостно-частотного преобразователя, и устройство управления ротором, включающее генератор с внешним возбуждением, содержащий две статорные и одну роторную обмотки, отличающийся тем, что в генератор введены две дополнительные статорные обмотки, на которые подается синусно-косинусное напряжение, промодулированное по амплитуде, уложенные в те же самые пазы статора генератора, что и основные.
| RU 2003116003 А, 27.11.2004 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| Электромагнитный подвес | 1972 |
|
SU446748A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| US 3394597 A, 30.07.1968. | |||

