Известны системы электропривода постоянного тока с импульсным полупроводниковым усилителем, в .которых для реализации астатического регулирования скорости управление усилителем осуществляется при помощи триггера, на входы которого подключены задающий генератор импульсов и датчи : обратной связи. В известных систег 1ах диаоазон регулирова ния скорости ограничен, так как применение в них явнополюсных датчиков и синхронных генераторов ведет к Пропорциональному изменению рабочей частоты усилителя, ухудшению точности и эиергетических соотнощений.
В предлагаемом устройстве в качестве датчика обратной связи Применен сельсин, включенный на вход лобового импульсного реверсивного усилителя. При этом оказывается возможным не только расширить диапазон регулирования скорости и обеспечить возможность реверсирования, но также осуществить дополнительное воздействие на угловое положение вала двигателя путем изменения фазы системы напряжений возбуждения сельсина.
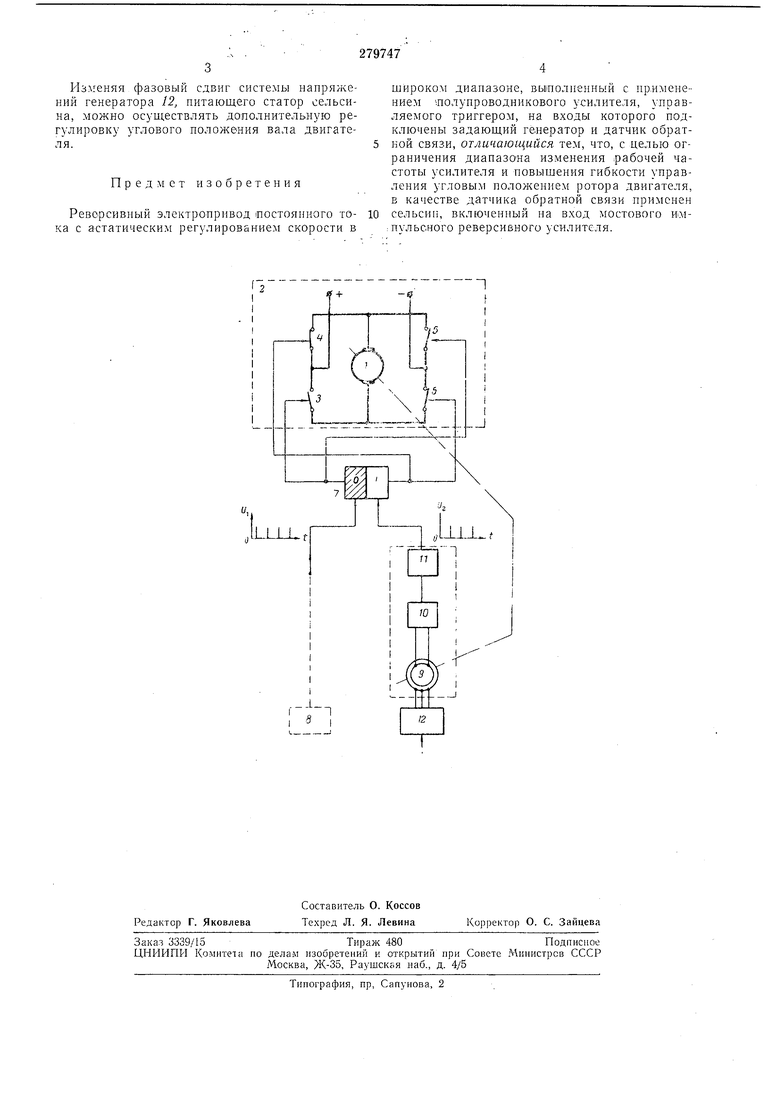
Принци пиальная схема устройства представлена на чертеже.
Якорь У двигателя постоянного тока включен в диагональ мостового полупроводникового усилителя 2, выпол.ненного на четырех переключателях 3, 4, 5, 6. Упр-авление усилителем 2 осуществляется триггером 7, который обеспечивает попарное включение элементов 3, 5 } 4, 6 усилителя. На входы триггера 7 поступают сигналы с задающего генератора
импульсов 8, а также с датчика обратной связи 9 через выпрямитель 10 и формирователь У/. В .качестве датчика обратной связки при-менеи сельсин, ротор которого закреплен на валу двигателя. Питание обмотки статора сельсина осуществляется трехфазной системой напряжений с выхода генератора 12.
Устройство работает Следующим образом. Если якорь двигателя не вращается, частота импульсов t/i, 11-2 .на входах триггера 7 одинакова, а фазовый сдвиг между ними равен л/2, то в этом случае относите.тьное время включения элементов 3, 5 и 4, 6 усилителя 2 одинаково, напряжение на якоре равно нулю.
Если увеличить или уменьщить частоту следовапия импульсов задающего генератора, то относительное время включения элементов 3, 5 и 4, 6 усилителя 2 начнет изменяться пропорционально интегралу разности частот Ui ,и U-,.
Якорь двигателя начинает вращаться, и иовое равновесие наступит при равенстве частот и и Uz. Однако при этом фазовый сдвиг между группамп указанных импульсов будет огличен от я/2. Аналогичный процесс возникает и
Р1злгеняя фазовый сдвиг системы напряи-сений генератора 12, питающего статор сельсина, можно осуществлять дополнительную регулировку углового положения вала двигателя.
Предмет изобретения
Реверсивный электропривод постоянного тока с астатическим регулированием скорости в
широком диапазоне, выполненный с нр.именением полупроводникового усилителя, управляемого триггером, на входы которого подключены задающий генератор и датчик обратной связи, отличающийся тем, что, с целью ограничения диапазона изменения |рабочей частоты усилителя и повыщения гибкости управления угловым положением ротора двигателя, в качестве датчика обратной связи применен сельси 1, включенный на вход мостового ИМпульсного реверсивного усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Синхронизированный вентильный электродвигатель | 1978 |
|
SU681517A1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| Вентильный электродвигатель | 1977 |
|
SU743129A1 |
| Устройство для астатического регулирования скорости вращения электродвигателя постоянного тока | 1978 |
|
SU780137A1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| Вентильный электродвигатель | 1986 |
|
SU1328891A2 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1972 |
|
SU327552A1 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
