Изобретение относится к автоматическому управлению и может быть использовано в системах автоматического управления динамическими нестационарными объектами, математические модели которых содержат переменные операторы и/или параметры.
Примером таких объектов может служить вихревая топка для сжигания смеси угля и водно-шламового топлива, технологический процесс в которой подвержен влиянию неконтролируемых возмущений, обусловленных, в частности, изменениями характеристик качества угля и водно-шламового топлива, нарушениями процесса распыления последнего, старением элементов конструкции топки, что приводит к изменению динамики тепловых процессов и, соответственно, динамики каналов преобразования материальных и энергетических потоков. Кроме того, рассматриваемый объект является объектом с вариабельной структурой, которая изменяется, например, при переключении установки на работу с подачей и без подачи угля, что наряду с изменением структуры объекта управления влечет за собой необходимость изменения его математической модели.
Для идентификации объектов управления известен адаптивный идентификатор [1], содержащий первую модель объекта, первый блок сравнения, сумматор, первый блок задержки, вторую модель объекта, второй блок сравнения, последовательно включенные регулятор, экстраполятор и второй блок задержки, соединенный выходом с первым входом второй модели объекта и второго блока сравнения, второй вход которого соединен с выходом регулятора, а выход - с первым входом первой модели объекта, выход которой соединен с первым входом сумматора, первый и второй входы первого блока сравнения соединены соответственно с выходом сумматора и первым входом идентификатора, второй вход которого соединен через первый блок задержки с вторым входом первой и второй моделей объекта, выходы которых соединены соответственно с первым и вторым входами сумматора, выход первого блока сравнения подключен к входу регулятора.
При работе идентификатора в модельно-замкнутом контуре регулирования, составленном из сумматора, первой модели объекта, регулятора, первого и второго блоков сравнения, восстанавливается с запаздыванием оценка коэффициента передачи объекта. Эта оценка экстраполируется на текущий момент времени, а также корректируется с учетом ошибки экстраполяции, которая определяется в контуре, содержащем второй блок задержки и второй блок сравнения.
Недостатком известного идентификатора являются его низкие функциональные возможности, так как он ориентирован для определения лишь оценки коэффициента передачи динамического объекта.
Наиболее близкой по технической сущности к предлагаемой системе идентификации объектов управления является система управления [2], содержащая объект управления, последовательно включенные задатчик, первый блок сравнения, блок формирования свойств ошибок регулирования, второй блок сравнения, операторный регулятор, координатный регулятор, второй вход которого соединен с выходом первого блока сравнения, выход координатного регулятора соединен с входом объекта управления, выход которого подключен к второму входу первого блока сравнения, выход которого подключен к второму входу второго блока сравнения, выход объекта управления подключен к выходу системы.
При работе системы управления в зависимости от сигнала рассогласования на выходе первого блока сравнения координатным регулятором вырабатывается регулирующее воздействие, например, с целью обеспечения заданных свойств ошибок регулирования выходного воздействия объекта управления, подверженного влиянию неизвестного возмущения. При этом если ошибка координатного регулирования не соответствует заданным ее свойствам, сигнал о которых формируется на выходе блока формирования свойств ошибок регулирования, то операторным регулятором вырабатываются управляющие воздействия на изменения структуры или значений параметров закона регулирования, реализуемого в координатном регуляторе.
Недостатком этой системы является низкая функциональная возможность, так как она не предназначена для выполнения функции идентификации нестационарного объекта, т.е. оценивания структуры и значений параметров его математической модели.
Задача изобретения - расширение функциональных возможностей системы.
Поставленная задача достигается тем, что в систему, содержащую задатчик, последовательно соединенные объект управления, первый блок сравнения, координатный регулятор, последовательно соединенные блок формирования свойств ошибок регулирования, второй блок сравнения, операторный регулятор, причем выход координатного регулятора соединен с входом объекта управления, выход которого является первым выходом системы, выход задатчика подключен к второму входу первого блока сравнения, введены модель объекта управления, третий блок сравнения и блок расчета параметров модели объекта, вход которого соединен с выходом операторного регулятора, выход блока расчета параметров модели подключен к второму выходу системы идентификации объекта управления и соединен с первым входом модели объекта управления, второй и третий входы которой соединены соответственно с входом и выходом объекта управления; первый, второй и третий выходы модели объекта управления подключены соответственно к первому входу третьего блока сравнения, к второму и третьему входам операторного регулятора, второй вход третьего блока сравнения соединен с выходом объекта управления, а выход третьего блока сравнения подключен к второму входу второго блока сравнения и к входу блока формирования свойств ошибок регулирования.
Модель объекта управления содержит последовательно соединенные первый блок задержки, четвертый блок сравнения, модель объекта в приращениях и пятый блок сравнения, второй блок задержки, вход которого соединен с третьим входом модели объекта управления, а выход второго блока задержки подключен к второму входу пятого блока сравнения, выход которого соединен с первым выходом модели объекта управления, выход модели объекта в приращениях соединен с вторым выходом модели объекта управления, третий выход которой соединен с первым входом модели объекта в приращениях, второй вход четвертого блока сравнения соединен с входом первого блока задержки и вторым входом модели объекта управления, второй вход модели объекта в приращениях подключен к первому входу модели объекта управления, который соединен с выходом блока расчета параметров модели.
Операторный регулятор содержит последовательно соединенные первый блок переопределения сигнала, первый блок возведения в квадрат, сумматор, первый блок деления, первый блок умножения, первый блок интегрирования и первый масштабирующий блок, последовательно соединенные блок дифференцирования, второй блок переопределения сигнала, второй блок деления, второй блок умножения, второй блок интегрирования и второй масштабирующий блок, второй блок возведения в квадрат, вход которого соединен с выходом второго блока переопределения сигнала, а своим выходом подключен к второму входу сумматора, первый вход операторного регулятора, соединенный с выходом второго блока сравнения, подключен к вторым входам первого и второго блоков умножения соответственно, второй вход операторного регулятора, соединенный с вторым выходом модели объекта управления, подключен к входу блока дифференцирования, третий вход операторного регулятора, соединенный с третьим выходом модели объекта управления, подключен к входу первого блока переопределения сигнала, выход которого соединен с вторым входом первого блока деления, первый вход которого соединен с вторым входом второго блока деления, первый вход которого подключен к входу второго блока возведения в квадрат, выходы первого и второго масштабирующих блоков подключены к выходу операторного регулятора и являются составляющими его выходного сигнала, соединенного с входом блока расчета параметров модели.
На фиг.1 приведена блок-схема системы идентификации объекта управления. На фиг.1 приведены следующие обозначения:
u(t) - сигнал об управляющем воздействии;
y(t) - сигнал о выходном воздействии объекта управления;
kj(t); 
J - число этих коэффициентов;
t - непрерывное время.
На фиг.2 представлена блок-схема модели объекта управления, которая является одним из вариантов реализации модели объекта управления 5. На фиг.2 приведены следующие обозначения:
yM(t) - сигнал о выходном воздействии модели объекта управления;
δu(t) - разность сигналов u(t) и u(t-τ);
δy(t) - сигнал о выходном воздействии модели объекта управления в приращениях.
На фиг.3 приведен пример блок-схемы операторного регулятора, реализующего закон функционирования (16), (17), (10), (11). На фиг.3 приведены следующие обозначения:
σ(t) - сигнал об отклонении ошибки модели объекта εy(t) от задания 


Система идентификации объектов управления содержит объект управления 1, координатный регулятор 2, первый блок 3 сравнения, задатчик 4, модель 5 объекта управления, третий блок 6 сравнения, блок 7 расчета параметров модели, операторный регулятор 8, второй блок 9 сравнения, блок 10 формирования свойств ошибок регулирования.
Модель объекта управления содержит первый блок 11 задержки, четвертый блок 12 сравнения, модель 13 объекта в приращениях, пятый блок 14 сравнения и второй блок 15 задержки.
Операторный регулятор содержит первый блок 16 переопределения сигнала, первый блок 17 возведения в квадрат, первый блок 18 деления, первый блок 19 умножения, сумматор 20, первый блок 21 интегрирования, первый масштабирующий блок 22, блок 23 дифференцирования, второй блок 24 переопределения сигнала, второй блок 25 возведения в квадрат, второй блок 26 деления, второй блок 27 умножения, второй блок 28 интегрирования и второй масштабирующий блок 29.
Система идентификации объектов управления работает следующим образом. Сигнал y(t) о выходном воздействии объекта управления 1 поступает по первому входу в первый блок 3 сравнения, где он сравнивается с сигналом y*(t) о задании на выходную переменную объекта 1, который поступает с выхода задатчика 4 на второй вход первого блока 3 сравнения. Выходной сигнал ε(t) первого блока 3 сравнения поступает в координатный регулятор 2, на выходе которого появляется сигнал u(t) об управляющем воздействии, вырабатываемый в соответствии с алгоритмом fR{·} координатного регулирования

Сигнал u(t) с выхода координатного регулятора 2 подается на второй вход модели 5 объекта управления и на вход объекта управления 1, где он обеспечивает с требуемой точностью компенсацию отклонений сигналов y(t) от y*(t). Одновременно с сигналом u(t) на вход модели 5 объекта управления подается сигнал y(t), с использованием которых осуществляется расчет сигнала yM(t) о выходном воздействии модели 5 объекта управления.
Функционирование модели 5 объекта управления осуществляется следующим образом. Сигнал u(t) с выхода координатного регулятора 2 задерживается в первом блоке 11 задержки на время задержки τ и вычитается из сигнала u(t). Полученная разность сигналов δu(t) поступает на первый вход модели 13 объекта в приращениях, на второй вход которой подается с выхода блока 7 расчета параметров модели сигнал о текущих значениях оценок ее коэффициентов a 1(t). Сигнал δy(t) с выхода модели 13 объекта в приращениях, характеризующий ее реакцию на приращение δu(t), суммируется в пятом блоке 14 сравнения с предварительно задержанным на время τ во втором блоке 15 задержки выходным сигналом y(t-τ) объекта управления 1, формируя на первом выходе модели 5 объекта управления сигнал yM(t).
Закон функционирования модели 5 объекта управления в общем виде представлен следующими выражениями





где τ - время задержки сигналов u(t) и y(t);
fз{·} - оператор задержки сигналов на время τ;
φ{·) - оператор модели объекта в приращениях;
J - число коэффициентов.
В частности, модель (4), в том числе и нелинейная, может быть представлена в удобной для идентификации линейно-параметрической форме
где 

Jл - число коэффициентов линейно-параметрической модели.
Например, если модель 13 объекта в приращениях представлена в виде линейного дифференциального уравнения первого порядка

где Т(t), k(t) - текущие значения оценок параметров модели в приращениях: постоянной времени и коэффициента передачи соответственно, которые являются составляющими сигнала kj(t), то выражение (7) будет иметь вид


Сигнал yM(t) с первого выхода модели 5 объекта управления поступает по первому входу в третий блок 6 сравнения, где он вычитается из сигнала y(t), поступающего по второму входу третьего блока 6 сравнения с выхода объекта управления 1. Выходной сигнал εy(t) третьего блока сравнения 6, пропорциональный разности сигналов с выхода объекта управления 1 y(t) и с первого выхода модели 5 объекта управления yM(t), т.е.

поступает по второму входу во второй блок 9 сравнения и на вход блока 10 формирования свойств ошибок регулирования, в котором реализуется оператор S{εy(t)}, отражающий в общем виде задание на свойства ошибок операторного регулирования.
Как вариант, это задание может быть связано с характером переходного процесса ошибки εy(t) и, в частности, выражено с помощью соотношения следующего вида

где α - постоянный коэффициент.
Сигнал 

который поступает на первый вход операторного регулятора 8, на второй и третий входы которого поступают сигналы δy(t) и δu(t) соответственно со второго и третьего выходов модели 5 объекта управления.
Закон функционирования операторного регулятора 8, который может реализовать в частном случае функции параметрического регулятора, в общем виде представлен с помощью следующих выражений

 ;
;


εy(t)=y(t)-yM(t),
где fи{·} - оператор текущего оценивания коэффициентов модели в приращениях.
Если модель 13 объекта в приращениях представлена в виде выражения (9), то выражение (15) примет следующий вид

δu1(t)=δu(t);

где θ - интервал интегрирования.
Функционирование операторного регулятора осуществляется следующим образом. Сигнал δu(t) с третьего выхода модели объекта управления 5 поступает по третьему входу операторного регулятора в первый блок 16 переопределения сигнала и, после преобразования в соответствии с выражением (10) в сигнал δu1(t), поступает в первый блок 17 возведения в квадрат, формируя на его выходе сигнал, пропорциональный значению 
Одновременно с сигналом δu(t) сигнал δy(t) с второго выхода модели 5 объекта управления поступает по второму входу операторного регулятора в блок 23 дифференцирования, на выходе которого формируется сигнал, пропорциональный значению производной 




Одновременно с сигналами δu(t) и δy(t) через первый вход операторного регулятора на вторые входы первого 19 и второго 27 блоков умножения поступает с выхода второго блока 9 сравнения сигнал σ(t), пропорциональный отклонению ошибки модели 5 объекта εy(t) от сигнала 

Значения сигнала

Таким образом, на выходе первого масштабирующего блока 22 вырабатывается сигнал, пропорциональный текущей оценке коэффициента
что соответствует выражению (16), а на выходе второго масштабирующего блока 29 - сигнал, пропорциональный
что соответствует выражению (17). Эти сигналы, являясь составляющими сигнала 



Текущие оценки коэффициентов модели (8), являющейся частным случаем модели объекта в приращениях (4), поступают как составляющие сигнала kj(t)={k(t);T(t)} из блока 7 расчета параметров модели в модель 13 объекта в приращениях, как одного из элементов модели объекта управления. Тем самым обеспечивается непрерывная корректировка оценок коэффициентов этой модели.
Введение новых блоков и связей позволяет расширить функциональные возможности системы идентификации объектов управления, т.е. оценивать структуру и значения параметров математической модели нестационарного объекта управления. Это также дает возможность использовать эту систему для идентификации линейных и нелинейных объектов управления, модели которых можно привести к линейно-параметрической форме.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. SU 1365047 A1. 07.07.1986.
2. Емельянов С.В., Коровин С.К. Новые типы обратной связи: Управление при неопределенности. - М.: Наука. Физматлит, 1997. - 352 с., с. 143, рис.3.16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ УПРАВЛЕНИЯ С ИХ ИДЕНТИФИКАЦИЕЙ | 2015 |
|
RU2583746C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Бинарная система управления | 1985 |
|
SU1303993A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| Система управления | 1985 |
|
SU1285430A1 |


Изобретение относится к автоматическому управлению и может быть использовано в системах автоматического управления динамическими нестационарными объектами, математические модели которых содержат переменные операторы и/или параметры. Технический результат заключается в повышении точности идентификации объектов управления. Система содержит модель объекта управления, третий блок сравнения и блок расчета параметров модели объекта, вход которого соединен с выходом операторного регулятора, выход блока расчета параметров модели подключен к второму выходу системы идентификации объекта управления и соединен с первым входом модели объекта управления, второй и третий входы которой соединены соответственно с входом и выходом объекта управления; первый, второй и третий выходы модели объекта управления подключены соответственно к первому входу третьего блока сравнения, к второму и третьему входам операторного регулятора, второй вход третьего блока сравнения соединен с выходом объекта управления, а выход третьего блока сравнения подключен к второму входу второго блока сравнения и к входу блока формирования свойств ошибок регулирования. 2 з.п. ф-лы, 3 ил.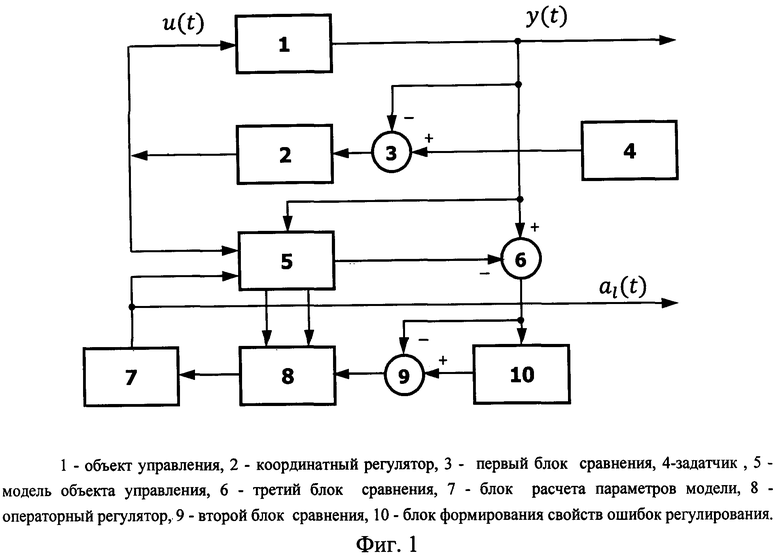
1. Система идентификации объектов управления, содержащая задатчик, последовательно соединенные объект управления, первый блок сравнения, координатный регулятор, последовательно соединенные блок формирования свойств ошибок регулирования, второй блок сравнения, операторный регулятор, выход координатного регулятора соединен с входом объекта управления, выход которого является первым выходом системы, выход задатчика подключен к второму входу первого блока сравнения, отличающаяся тем, что в нее введены модель объекта управления, третий блок сравнения и блок расчета параметров модели объекта, вход которого соединен с выходом операторного регулятора, выход блока расчета параметров модели подключен к второму выходу системы идентификации объекта управления и соединен с первым входом модели объекта управления, второй и третий входы которой соединены соответственно с входом и выходом объекта управления; первый, второй и третий выходы модели объекта управления подключены соответственно к первому входу третьего блока сравнения, к второму и третьему входам операторного регулятора, второй вход третьего блока сравнения соединен с выходом объекта управления, а выход третьего блока сравнения подключен к второму входу второго блока сравнения и к входу блока формирования свойств ошибок регулирования.
2. Система по п.1, отличающаяся тем, что модель объекта управления содержит последовательно соединенные первый блок задержки, четвертый блок сравнения, модель объекта в приращениях и пятый блок сравнения, второй блок задержки, вход которого соединен с третьим входом модели объекта управления, а выход второго блока задержки подключен к второму входу пятого блока сравнения, выход которого соединен с первым выходом модели объекта управления, выход модели объекта в приращениях соединен с вторым выходом модели объекта управления, третий выход которой соединен с первым входом модели объекта в приращениях, второй вход четвертого блока сравнения соединен с входом первого блока задержки и вторым входом модели объекта управления, второй вход модели объекта в приращениях подключен к первому входу модели объекта управления, который соединен с выходом блока расчета параметров модели.
3. Система по п.1, отличающаяся тем, что операторный регулятор содержит последовательно соединенные первый блок переопределения сигнала, первый блок возведения в квадрат, сумматор, первый блок деления, первый блок умножения, первый блок интегрирования и первый масштабирующий блок, последовательно соединенные блок дифференцирования, второй блок переопределения сигнала, второй блок деления, второй блок умножения, второй блок интегрирования и второй масштабирующий блок, второй блок возведения в квадрат, вход которого соединен с выходом второго блока переопределения сигнала, а своим выходом подключен к второму входу сумматора, первый вход операторного регулятора, соединенный с выходом второго блока сравнения, подключен к вторым входам первого и второго блоков умножения соответственно, второй вход операторного регулятора, соединенный с вторым выходом модели объекта управления, подключен к входу блока дифференцирования, третий вход операторного регулятора, соединенный с третьим выходом модели объекта управления, подключен к входу первого блока переопределения сигнала, выход которого подключен к второму входу первого блока деления, первый вход которого соединен с вторым входом второго блока деления, первый вход которого подключен к входу второго блока возведения в квадрат, выходы первого и второго масштабирующих блоков подключены к выходу операторного регулятора и являются составляющими его выходного сигнала, соединенного с входом блока расчета параметров модели.
| SU 1565261 A1, 10.12.1999 | |||
| Адаптивный идентификатор для объекта с запаздыванием | 1986 |
|
SU1365047A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2004 |
|
RU2258951C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

