Изобретение относится к области технической физики, в частности к способам оптической и звуковой охранной сигнализации, в которых используются оптические средства передачи информации, что позволяет определять такие параметры движения объекта нарушающего границу охраняемого участка (объекта), как место нарушения границы объектом, траекторию его движения, вектор скорости этого движения, а также индентифицировать сам объект.
Один из способов оптической охранной сигнализации лежит в основе предлагаемого в [1] оптического охранного устройства, используемого для охраны ценных предметов в закрытых помещениях. Здесь используется различие способности отражения ИК луча, испускаемого излучателя, от охраняемого предмета и от стены помещения, в котором находится этот предмет. При отсутствии охраняемого предмета происходит смещение ИК луча в фотоприемном устройстве и появляется сигнал тревоги.
Недостатками этого способа являются возможность применения его только в закрытых помещениях, ограниченность числа охраняемых предметов, ограниченность по размерам помещений [1], в которых находятся охраняемые предметы, наконец, невозможность идентифицировать объект, приближающийся к охраняемому предмету.
Отметим, что последний недостаток, в известной мере, можно устранить, если в рамках того же способа дополнительно, используя тот же самый ИК луч, создать оптическое переговорное устройство [2], которое передавало бы звуковую информацию вокруг охраняемого предмета на пульт управления охранной системы.
Другим способом оптической охранной сигнализации наиболее близким к предлагаемому является способ прерывания объектом ИК луча [3]. ИК луч представляет собой оптические импульсы, генерируемые излучателем и принимаемые в отсутствие объекта фотоприемным устройством (фотоприемником), которое отнесено от излучателя на такое расстояние, при котором излучатель и фотоприемник остаются оптически связанными. При этом излучатель и фотоприемник располагаются так, чтобы ИК луч распространялся вдоль границы охраняемого участка. В случае прерывания ИК луча объектом в фотоприемнике срабатывает сигнал тревоги.
Основными недостатками этого способа охранной сигнализации являются невозможность определения таких данных об объекте, как вектор скорости и траектория его движения, габариты объекта, наконец, невозможность идентифицировать сам объект. Последнее является наиболее важной, но весьма трудной задачей, не имеющей до сих пор общего решения [3].
Целью изобретения является определение параметров движения объекта, таких как вектор мгновенной скорости, вектор средней скорости по направлению и времени, траектория движения как функция времени, определение габаритов объекта и его идентификация, наконец, увеличение протяженности границ охраняемого участка и повышение эффективности его охраны.
Для достижения поставленной цели в соответствии с предлагаемым способом фотоприемное устройство, называемое ниже фотоприемником и устройство генерации оптических ИК импульсов, называемое в дальнейшем излучателем, сопрягают в одно устройство, которое будем называть ИФП. ИФП тиражируют в количестве  штук и распределяют по N+1 устройствам, называемым штангами. Очевидно число Mi определяет число выходящих и входящих в i-ю штангу ИК лучей. На каждой i-й штанге, где i=1,2,...,N+1, размещают 2Mi ИФП, в которых каждый из 2Mi пространственно независимых излучателей изготавливают так, что генерируемый им оптический луч представляет собой
штук и распределяют по N+1 устройствам, называемым штангами. Очевидно число Mi определяет число выходящих и входящих в i-ю штангу ИК лучей. На каждой i-й штанге, где i=1,2,...,N+1, размещают 2Mi ИФП, в которых каждый из 2Mi пространственно независимых излучателей изготавливают так, что генерируемый им оптический луч представляет собой  , где αi = 1,2,...,2Mi независимых оптических каналов. Это обусловлено тем, что каждый оптический луч представляет собой
, где αi = 1,2,...,2Mi независимых оптических каналов. Это обусловлено тем, что каждый оптический луч представляет собой  различных последовательностей соосных оптических импульсов, причем каждая последовательность характеризуется номером
различных последовательностей соосных оптических импульсов, причем каждая последовательность характеризуется номером  и периодом
и периодом  при этом
при этом  если
если  где
где 
Кроме того, каждый из 2Mi ИФП дополняют элементами, позволяющими i-й штанге с ИП осуществлять с помощью ИК лучей прием различной информации, а том числе звуковой, по  независимым оптическим каналам из любых 2Mi независимых пространственных направлений и передачу этой информации по такому же числу Ki независимых оптических каналов в любых других 2Mi пространственных направлениях. Таким образом, i-ю штангу СИП можно использовать в качестве элемента, обеспечивающего, в частности, дуплексную оптическую связь. Для осуществления такой связи штанги с ИП выставляют в соответствии с их номерами i=1,2,...,N+1 вдоль линии границы охраняемого участка в местах, определяемых векторами
независимым оптическим каналам из любых 2Mi независимых пространственных направлений и передачу этой информации по такому же числу Ki независимых оптических каналов в любых других 2Mi пространственных направлениях. Таким образом, i-ю штангу СИП можно использовать в качестве элемента, обеспечивающего, в частности, дуплексную оптическую связь. Для осуществления такой связи штанги с ИП выставляют в соответствии с их номерами i=1,2,...,N+1 вдоль линии границы охраняемого участка в местах, определяемых векторами  где R
где R по осям ортогональной системы x, y, z, связанной с охраняемым участком. При этом должно выполняться условие
по осям ортогональной системы x, y, z, связанной с охраняемым участком. При этом должно выполняться условие
где 1≤j≤N+1, j≠i, i+1 и ρj - половина максимального размера в поперечном сечении j-й штанги с ИП.
Каждую i-ю штангу с ИП оптически связывают, в том числе дуплексно, 2Mi ИК лучами с другими штангами с ИП таким образом, чтобы обеспечить, в частности дуплексную передачу информации вдоль линии границы охраняемого участка. При этом присваивают оптическим лучам, выходящим из i-й штанги с ИП, номера αγi, где γ = l и αli = 1, 2,...,Mli, если эти лучи передают информацию к штангам с ИП с номерами j=i-Mli,...,i-1, и γ = r и αri = 1, 2, ...,Mri, если они передают информацию к штангам с ИП с номерами j=i+1, i+2,. . .,i+Mri, причем Mli+Mri=2Mi. Кроме того, в системе координат, связанной со штангой с ИП, в каждой i-й штанге с ИП в местах, определяемых векторами  где
где  αγi = 1,2,...Mγi, γ = r,l
αγi = 1,2,...Mγi, γ = r,l
где  и
и
помещают однонаправленные микрофоны с ориентацией их рабочей стороны по направлению выходящих из i-й штанги с ИП ИК лучей, причем каждый из этих микрофонов связывают электрически только с одним независимым оптическим каналом передачи информации, соответствующим номеру  или
или 
Помимо этого местоположения штанг с ИП, определяемые совокупность векторов  выбирают так, чтобы, во-первых, для всех штанг с ИП с номерами i и j, связанных между собой непосредственно оптически, выполнялись условия
выбирают так, чтобы, во-первых, для всех штанг с ИП с номерами i и j, связанных между собой непосредственно оптически, выполнялись условия
где R - радиус сферы действия микрофонов, max(ρi, ρj) - максимальное по значению величины из двух величин ρi и ρj, и любая точка линии границы охраняемого участка всегда находилась в сфере действия микрофонов, помещенных на ближайшей к этой точке штанге с ИП. Во-вторых, необходимо, чтобы местоположение штанг с ИП  вместе с подбором числа 2Mi оптических лучей, связывающих i-ю штангу с ИП с другими штангами с ИП, обеспечивал пересечение объектом, подлежащим идентификации, не менее четырех пространственно различных оптических лучей, проекции которых на плоскость z=0 представляли бы собой различные прямые.
вместе с подбором числа 2Mi оптических лучей, связывающих i-ю штангу с ИП с другими штангами с ИП, обеспечивал пересечение объектом, подлежащим идентификации, не менее четырех пространственно различных оптических лучей, проекции которых на плоскость z=0 представляли бы собой различные прямые.
Далее заблаговременно при отсутствии пересечения линии границы охраняемого участка объектом определяют средние по времени значения совокупности электрических амплитуд от звуковых сигналов
и совокупности спектральных составляющих этих сигналов по частоте  . Здесь символ { ...} означает совокупность всех величин, стоящих в фигурных скобках, получающихся при изменении всех индексов в пределах их значений.
. Здесь символ { ...} означает совокупность всех величин, стоящих в фигурных скобках, получающихся при изменении всех индексов в пределах их значений.
В случае прерывания объектом оптического ИК луча под номером α′γ′i′ где штрихи будут означать, что в данный момент времени луч под таким номером прерывается объектом, информация об этом передается по штангам с ИП на пульты управления охранной системы, подключенным к штангам с ИП с номерами i=1 и i=N+1. Здесь фиксируют номера штанг с ИП j из совокупности i = i′-Mli′,..., i′+ Mri′, непосредственно оптически связанных со штангой с ИП под номером i1, момент времени  соответствующий началу прерывания объектом ИК луча под номером α′γ′i′, длительность прерывания этого луча
соответствующий началу прерывания объектом ИК луча под номером α′γ′i′, длительность прерывания этого луча  Одновременно включают все микрофоны, расположенные на штангах с ИП под номерами j из совокупности i = i′-Mli′,..., i′+ Mri′. Микрофоны работают до тех пор, пока объект не минует все ИК лучи, исходящие из штанги с ИП под номером i', встречающиеся на пути объекта. При пересечении объектом ИК лучей других штанг с ИП все повторяется, т. е. номер штанги с ИП i1 является функцией времени t. По штангам с ИП передают на пульты управления охранной системы звуковую информацию из области штанг с ИП под номерами j и совокупности i = i′-Mli′,..., i′+ Mri′, а также значения электрических амплитуд от звуковых сигналов как функций времени t и их спектральные составляющие по частоте ω
Одновременно включают все микрофоны, расположенные на штангах с ИП под номерами j из совокупности i = i′-Mli′,..., i′+ Mri′. Микрофоны работают до тех пор, пока объект не минует все ИК лучи, исходящие из штанги с ИП под номером i', встречающиеся на пути объекта. При пересечении объектом ИК лучей других штанг с ИП все повторяется, т. е. номер штанги с ИП i1 является функцией времени t. По штангам с ИП передают на пульты управления охранной системы звуковую информацию из области штанг с ИП под номерами j и совокупности i = i′-Mli′,..., i′+ Mri′, а также значения электрических амплитуд от звуковых сигналов как функций времени t и их спектральные составляющие по частоте ω
соответственно, где номера j относятся к совокупности i = i′-Mli′,..., i′+ Mri′.
Принимаемую звуковую информацию оперативно анализируют, вводя в память ЭВМ электрические амплитуды от звуковых сигналов и их спектральные составляющие, и, проводя сравнение полученных звуковых образов со звуковыми образами тех объектов, которые хранятся в памяти ЭВМ.
Далее с помощью полученных данных определяют вектор  местоположения объекта, прерывающего оптические лучи, из условия минимума функции
местоположения объекта, прерывающего оптические лучи, из условия минимума функции
по величинам Rx(f),Ry(f),Rt(f) и A, т.е из системы уравнений
Величина  определяет траекторию движения объекта. При этом должно выполнять условие
определяет траекторию движения объекта. При этом должно выполнять условие
В выражении для функции  сумма по номерам j означает, что выбираются лишь те номера штанг с ИП j, которые в данный момент времени t связаны непосредственно оптически со штангами с ИП под номерами i1 и у которых в этот же момент времени t ИК лучи прерваны объектом.
сумма по номерам j означает, что выбираются лишь те номера штанг с ИП j, которые в данный момент времени t связаны непосредственно оптически со штангами с ИП под номерами i1 и у которых в этот же момент времени t ИК лучи прерваны объектом.
Далее из условий минимума функционала
по параметрам  определяют эти параметры при выполнении условия
определяют эти параметры при выполнении условия
из системы уравнений
Здесь величины  являются проекциями на оси координат x, y вектора, характеризующего место, где происходит прерывание движущимся объектом первого оказавшегося на его пути оптического луча под номером
являются проекциями на оси координат x, y вектора, характеризующего место, где происходит прерывание движущимся объектом первого оказавшегося на его пути оптического луча под номером  и начало этого прерывания происходит в момент времени
и начало этого прерывания происходит в момент времени  Величины
Величины  проекции на оси x, y векторов
проекции на оси x, y векторов  соответственно, где
соответственно, где  вектор, определяющий в системе координат, связанной с i'-й штангой, с ИП местоположение излучателя, генерирующего ИК луч под номером
вектор, определяющий в системе координат, связанной с i'-й штангой, с ИП местоположение излучателя, генерирующего ИК луч под номером  Величины
Величины  являются проекциями на оси координат x, y среднего значения по времени и направлению вектора скорости движения объекта. Момент времени
являются проекциями на оси координат x, y среднего значения по времени и направлению вектора скорости движения объекта. Момент времени  соответствует началу прерывания объектом ИК луча под номером
соответствует началу прерывания объектом ИК луча под номером  Величины
Величины  проекции на оси координат x, y соответственно единичного вектора, направленного по оси оптического луча под номером
проекции на оси координат x, y соответственно единичного вектора, направленного по оси оптического луча под номером  и выходящего из штанги с ИП под номером i'.
и выходящего из штанги с ИП под номером i'.
Далее вычисляют совокупность величин  где
где

и символы  означают совокупности величин, стоящих в фигурных скобках, получающихся при изменении индексов у этих величин лишь на те значения из них
означают совокупности величин, стоящих в фигурных скобках, получающихся при изменении индексов у этих величин лишь на те значения из них  1 ≤ i' ≤ N + 1, которые характеризуют оптические лучи, прерываемые объектом. Учитывая пространственное расположение ИК лучей с номерами
1 ≤ i' ≤ N + 1, которые характеризуют оптические лучи, прерываемые объектом. Учитывая пространственное расположение ИК лучей с номерами  судят о габаритах объекта. Наконец, сопоставляя все полученные данные по параметрам движения объекта Vx(t), Vy(t),
судят о габаритах объекта. Наконец, сопоставляя все полученные данные по параметрам движения объекта Vx(t), Vy(t),  с данными о его габаритах и звуковом образе, причем с обоих пультов управления охранной системы, идентифицируют объект.
с данными о его габаритах и звуковом образе, причем с обоих пультов управления охранной системы, идентифицируют объект.
Предложенный способ может быть реализован с помощью устройства, представленного на рис. 1 и 2.
Согласно рис. 1 устройство содержит штанги с ИП a, выставленные по порядку под номерами i = 1, 2, ..., N + 1 вдоль линии b границы охраняемого участка в точках, определяемых векторами  где i = 1, 2, ..., N + 1, причем штанги с ИП с номерами i = 1, N + 1 связаны с пультом управления охранной системы. Каждая i=ая штанга с ИП содержит комплект ИП c, состоящий из 2Mi ИП, в которые входят элементы, позволяющие i-й штанге с ИП осуществлять с помощью ИК лучей причем различной информации, в том числе звуковой, по
где i = 1, 2, ..., N + 1, причем штанги с ИП с номерами i = 1, N + 1 связаны с пультом управления охранной системы. Каждая i=ая штанга с ИП содержит комплект ИП c, состоящий из 2Mi ИП, в которые входят элементы, позволяющие i-й штанге с ИП осуществлять с помощью ИК лучей причем различной информации, в том числе звуковой, по  независимыми оптическими каналам из любых 2Mi независимых пространственных направлений и передачу этой информации по тому же числу Ki независимых каналов в любых других 2Mi пространственных направлениях. Кроме того, на каждый i-й штанге с ИП в точках, определяемых векторами
независимыми оптическими каналам из любых 2Mi независимых пространственных направлений и передачу этой информации по тому же числу Ki независимых каналов в любых других 2Mi пространственных направлениях. Кроме того, на каждый i-й штанге с ИП в точках, определяемых векторами  в системе координат, связанной с i-й штангой с ИП, располагаются однонаправленные микрофоны d, ориентированные рабочей стороной по направлению входящих из i-й штанги ИК лучей e под номерами αγi = 1,2,...Mγi, где γ = l, r, причем микрофон, местоположение которого характеризуется вектором
в системе координат, связанной с i-й штангой с ИП, располагаются однонаправленные микрофоны d, ориентированные рабочей стороной по направлению входящих из i-й штанги ИК лучей e под номерами αγi = 1,2,...Mγi, где γ = l, r, причем микрофон, местоположение которого характеризуется вектором  электрически связан с оптическим каналом под номером
электрически связан с оптическим каналом под номером 
Фиг. 1 соответствует следующим значениям параметров:
1 ≤ αli ≤ Mli = 6, 1 ≤ αri ≤ Mri = 6;
1 ≤ αli+2 = Mli+2 = 6, 1 ≤ αri+2 Mri+2 = 6;
1 ≤ αli±1 ≤ Mli+1 = 3, 1 ≤ αri±1 ≤ Mri+1 = 3;
2Mi = Mli + Mri = 12; 2Mi+2 = Mli+2 + Mri+2 = 12;
2Mi+1 = Mli+1 + Mri+1 = 6;



т. е. фиг. 1 соответствует дуплексной передаче информации по штангам с ИП, причем i-ая и i+2-ая штанги с ИП осуществляют прием и передачу информации по двенадцати различным пространственным направлениям каждая, а i-1-я и i+1-я штанги с ИП - по шести различным пространственным направлениям каждая.
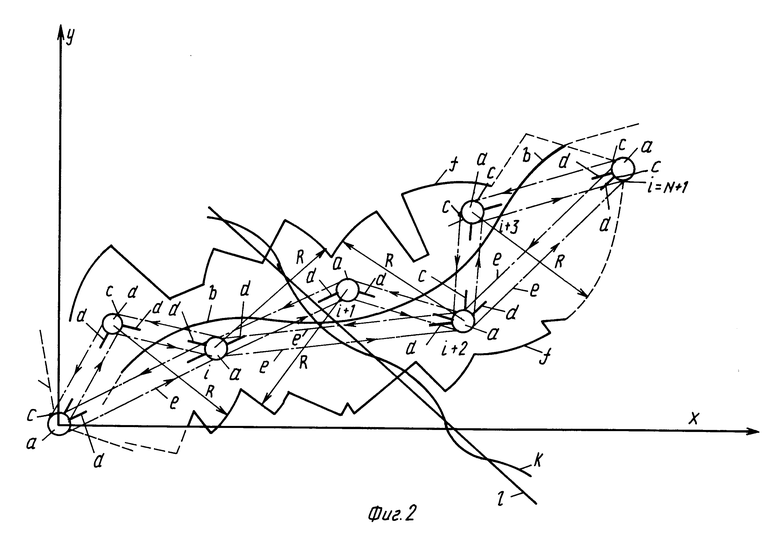
Кроме того, в устройство охранной системы входит линия f границы действия микрофонов, которая согласно фиг. 2, где представлена проекция устройства на полость Z = 0, должна охватывать область, внутри которой находится линии b границы охраняемого участка.
Наконец, отметим, что вместо однонаправленных микрофонов d устройство может содержать остронаправленные микрофоны.
Способ реализуется следующим образом. Находящиеся на штангах с ИП a, расставленных вдоль линии b границы охраняемого участка, И c излучают и принимают ИК лучи e, с помощью которых обеспечивается связь и передача информации, в том числе звуковая, по штангам с ИП a как между пультами управления охранной системы, связанными со штангами с ИП i=1 и i = N+1, так и между любым пультом управления и любой из штанг с ИП a. С пультов управления охранной системы, пользуясь связью по штангам с ИП a, можно включить микрофоны d, находящиеся на штангах с ИП a, в окрестности любой из интересующей нас штанги с ИП и выяснить там звуковую обстановку. Граница окрестности определяется радиусом R действия микрофонов d, углом раствора принимаемых микрофоном звуковых волн и ориентацией их рабочей стороны. Совокупное действие всех микрофонов d определяет линию f границы всей охраняемой микрофонами области вдоль линии b границы охраняемого участка. На фиг. 1 и 2 линия f приведена для случая угла раствора, принимаемого микрофоном звуковых волн в 60o.
При движении через линию b охраняемого участка объект, который на фиг. 1 представлен в двух g1 и g2 положениях, последовательно прерывает ИК лучи e под номерами  в частности, самый первый по времени ИК луч под номером
в частности, самый первый по времени ИК луч под номером  Информация о прерывании ИК луча под номером
Информация о прерывании ИК луча под номером  передается по штангам с ИП a на пульты управления охранной системы. Здесь фиксируют те номера штанг с ИП j из совокупности штанг с ИП с номерами i = i′-Mli′,..., i′+ Mri′, которые непосредственно оптически связаны со штангой с ИП под номером i', а также фиксируют момент времени
передается по штангам с ИП a на пульты управления охранной системы. Здесь фиксируют те номера штанг с ИП j из совокупности штанг с ИП с номерами i = i′-Mli′,..., i′+ Mri′, которые непосредственно оптически связаны со штангой с ИП под номером i', а также фиксируют момент времени  соответствующий началу прерывания объектом ИК луча под номером
соответствующий началу прерывания объектом ИК луча под номером  и длительность прерывания этого луча
и длительность прерывания этого луча 
При поступлении на пульты управления охранной системы информации о прерывании объектом ИК луча под номером  включают все микрофоны d, расположенные на штангах с ИП под номерами j из совокупности j = i′-Mli′,..., i′+ Mvi′. Эта совокупность микрофонов работает до тех пор, пока объект не минует все те ИК лучи, выходящие из штанги с ИП под номером i', которые встречаются на пути объекта. При пересечении объектом ИК лучей других штанг с ИП указанная совокупность микрофонов выключается и включается другая совокупность микрофонов и т.д. Таким образом, номер штанги с ИП i' является функцией параметров движения объекта, то есть в конечном итоге функцией времени t.
включают все микрофоны d, расположенные на штангах с ИП под номерами j из совокупности j = i′-Mli′,..., i′+ Mvi′. Эта совокупность микрофонов работает до тех пор, пока объект не минует все те ИК лучи, выходящие из штанги с ИП под номером i', которые встречаются на пути объекта. При пересечении объектом ИК лучей других штанг с ИП указанная совокупность микрофонов выключается и включается другая совокупность микрофонов и т.д. Таким образом, номер штанги с ИП i' является функцией параметров движения объекта, то есть в конечном итоге функцией времени t.
Звуковая информация из области штанг с ИП под номерами j из совокупности i = i′-Mli′,..., i′+ Mri′, а также значения электрических амплитуд от звуковых сигналов как функций времени t
и их спектральные составляющие
поступают на пульты управления охранной системы, оперативно анализируются, а также вводятся в компьютер наряду с данными  где, принимая во внимание пространственное расположение ИК лучей
где, принимая во внимание пространственное расположение ИК лучей  с помощью уравнений (5) - (10) определяются параметры движения объекта Vx(t), Vy(t),
с помощью уравнений (5) - (10) определяются параметры движения объекта Vx(t), Vy(t),  его габариты, а также строится звуковой образ объекта путем сравнения со звуковыми образами объектов, хранящихся в памяти ЭВМ, и с помощью всей совокупности данных проводится идентификация объекта.
его габариты, а также строится звуковой образ объекта путем сравнения со звуковыми образами объектов, хранящихся в памяти ЭВМ, и с помощью всей совокупности данных проводится идентификация объекта.
Отметим, что как видно из фиг. 1 и 2, в случае включенных микрофонов d можно установить наличие объекта в зоне действия микрофонов, определяемых линий f, еще до прерывания объектом ИК лучей, поскольку линия b границы охраняемого участка лежит внутри области, ограниченной линией f.
Проведем теоретическое обоснование способа определения параметров движения объекта и его идентификации.
Прежде всего поясним смысл неравенств (1) - (4). Условие (1) означает, что из трех с последовательными номерами штанг с ИП третья штанга с ИП всегда будет отстоять от первой на большем расстоянии, чем вторая. Это дает возможность нумеровать штанги с ИП по вполне определенной системе, что будет использоваться на практике.
Неравенства (2), (3) означают, что все микрофоны, располагаются на какой-либо штанге с ИП, помещаются в разные точки пространства, причем настолько разные, что микрофоны заведомо не соприкасаются между собой. В дальнейшем это обстоятельство будет существенным при решении системы уравнений (5).
Неравенство (4) обеспечивает расположение линии b границы охраняемого участка внутри области ограниченной линией f границы действия микрофонов и при этом любая точка линии b находится в области действия микрофонов, находящихся на ближайших к этой точке штангах с ИП. Неравенство (4) получено из условия того, что максимальное разрешенное расстояние между центрами штанг с ИП под номерами i и j определяется минимальной длиной хорды, определяемой точками пересечения окружностей радиуса R с центрами в точках, задаваемых векторами  Принимая, что минимальная длина хорды равна 2 max(ρi, ρj) , находим расстояние между центрами окружностей, и требуем, чтобы это расстояние было больше величины
Принимая, что минимальная длина хорды равна 2 max(ρi, ρj) , находим расстояние между центрами окружностей, и требуем, чтобы это расстояние было больше величины 
Обоснуем систему уравнений (5). Ниже все обозначения имеют тот же смысл, что и в (5). Не ограничивая общности можно считать, что звуковые волны исходят из центра инерции объекта, определяемого вектором  Как известно [4] , давление, на которое реагирует микрофон на j-й штанге, связанный электрически с оптическим каналом под номером
Как известно [4] , давление, на которое реагирует микрофон на j-й штанге, связанный электрически с оптическим каналом под номером  обратно пропорционально расстоянию от источника звука до микрофона, т.е.
обратно пропорционально расстоянию от источника звука до микрофона, т.е.

Электрический сигнал, дополнительно возникший вследствие реакции микрофона на давление Δp, очевидно, равен (см. систему уравнений (5)).
Здесь A - некоторая постоянная, которую можно найти вместе с составляющими вектора  (Rx(t), Ry(t), Rz(t)). Поскольку в (11) содержится четыре неизвестных, то необходима система из четырех независимых уравнений. Это обеспечивается, как уже отмечалось, неравенствами (2), (3) согласно которым векторы
(Rx(t), Ry(t), Rz(t)). Поскольку в (11) содержится четыре неизвестных, то необходима система из четырех независимых уравнений. Это обеспечивается, как уже отмечалось, неравенствами (2), (3) согласно которым векторы  с разными индексами различны. В случае, если число уравнений (11) более четырех, т.е. число независимых оптических каналов и соответственно число микрофонов более четырех, то возникает проблема переполнения системы уравнений (11), поскольку на эксперименте неизвестные будут, вообще говоря, различными при различных выборах системы четырех независимых уравнений.
с разными индексами различны. В случае, если число уравнений (11) более четырех, т.е. число независимых оптических каналов и соответственно число микрофонов более четырех, то возникает проблема переполнения системы уравнений (11), поскольку на эксперименте неизвестные будут, вообще говоря, различными при различных выборах системы четырех независимых уравнений.
В таких случаях поступают следующим образом.
Рассмотрим квадрат разности левой и правой частей уравнений (11) при всех возможных значениях индексов j,  Просуммируем этот квадрат разности по всем возможным значениям указанных индексов. Получим функцию
Просуммируем этот квадрат разности по всем возможным значениям указанных индексов. Получим функцию  и найдем те значения вектора
и найдем те значения вектора  и постоянной A, при которых эта
и постоянной A, при которых эта  величина минимальна. Это будут те же значения неизвестных, которые будут минимизировать сумму среднеквадратичных отклонений экспериментальных и теоретических значений электрических сигналов от микрофонов.
величина минимальна. Это будут те же значения неизвестных, которые будут минимизировать сумму среднеквадратичных отклонений экспериментальных и теоретических значений электрических сигналов от микрофонов.
Условия минимальности функционала  по параметрам Rx(t), Ry(t), Rz(t) и A дают систему уравнений (5), которые определяют траекторию движения объекта. Условие же (6) определяется минимальным числом независимых уравнений (5).
по параметрам Rx(t), Ry(t), Rz(t) и A дают систему уравнений (5), которые определяют траекторию движения объекта. Условие же (6) определяется минимальным числом независимых уравнений (5).
Проведем оценки расстояний между соседними штангами с ИП, при которых еще возможна работа охранной системы в полном объеме, то есть с использованием как ИК лучей, так и микрофонов. Поскольку оптическая связь между штангами с ИП сохраняется по мере увеличения расстояния между ними вплоть до нескольких километров при сравнительно низкой потребляемой мощности около 0,1 Вт то ясно, что лимитирует расстояние между соседними штангами радиус R зоны действия микрофонов.
Максимально возможное значение Rmax можно оценить следующим образом. Напряжение, возникающее в микрофоне от поступления в нее звуковой волны, равно  и оно должно превышать наименьшее возможное для регистрации приборами напряжение Uo. Отсюда следует, что максимальное возможное значение
и оно должно превышать наименьшее возможное для регистрации приборами напряжение Uo. Отсюда следует, что максимальное возможное значение
Здесь ε - чувствительность микрофона, максимальное значение которой имеет величину [5] ε ≃ 50 мВ/Па.
Величина ρ = 1,29 кг/м3 и V = 3,4 • 102 м/с плотность воздухе и скорость звука в воздухе при комнатной температуре; Io - интенсивность звука непосредственно на поверхности источника звука; a - характерный размер источника звука.
Так, если мы хотим выяснить величину R, полагая, что для интенсивности Io, соответствующей речи средней громкости, при a ≈ 1 м Io ≈ 10-6 Вт/м2 и Vo ≈ 0,01 мВ, то получаем R ≈ 150 м. Таким образом, расстояние между соседними штангами может быть около 2R ≈ 200 - 300 м.
Что касается протяженности линии границы охраняемого участка, то она определяется числом возможных ретрансляций, поступающих с какой-либо штанги с ИП оптических сигналов на последующие штанги с ИП. Число таких ретрансляций без существенного искажения сигнала весьма велико и можно с уверенностью сказать, что протяженность линии границы охраняемого участка вполне может быть сто и более километров.
Обоснуем теперь систему уравнений (8). Предположим для простоты, что объект, как показано на фиг. 1, плоский и плоскость, проходящая по объекту перпендикулярна плоскости z = 0 в ортогональной системе координат x, y, z. Кроме того, без ограничения общности можно считать, что объект движется поступательно. Истинная проекция траектории движения объекта на плоскость z = 0 имеет на фиг. 2 вид кривой k и определяется проекциями Rx(t) и Ry(t) на оси x, y вектора  Вектор
Вектор  можно определить из уравнений (5), однако, лишь тогда, когда интенсивности звука Io достаточно велика, чтобы расстояние между соседними штангами с ИП было меньше, чем величина 2Rmax. В противном случае определить кривую k невозможно.
можно определить из уравнений (5), однако, лишь тогда, когда интенсивности звука Io достаточно велика, чтобы расстояние между соседними штангами с ИП было меньше, чем величина 2Rmax. В противном случае определить кривую k невозможно.
Однако в этой ситуации возможно определить некоторую среднюю траекторию, представляющую собой прямую, проекция которой на плоскость z = 0 представлена на фиг. 2 прямой l. С учетом сделанных выше упрощающих предположений, полагая, что  компоненты по осям x, y среднего по времени и направлению вектора скорости объекта, для проекции на плоскость z = 0 траектории той точки объекта, которая первой по времени начинает пересекать первый встречающийся на пути объекта ИК луч под номером
компоненты по осям x, y среднего по времени и направлению вектора скорости объекта, для проекции на плоскость z = 0 траектории той точки объекта, которая первой по времени начинает пересекать первый встречающийся на пути объекта ИК луч под номером  имеем уравнение, которое является уравнением для прямой l
имеем уравнение, которое является уравнением для прямой l
Важным моментом здесь является то, что проекция на плоскость z = 0 траекторий всех прочих точек объекта, которые в соответствующие моменты времени  пересекают ИК лучи под номерами
пересекают ИК лучи под номерами  описываются теми же уравнениями (12). Для получения соответствующих координат пересечения в плоскости z = 0 достаточно в уравнениях (12) вместо t подставить соответствующие времени
описываются теми же уравнениями (12). Для получения соответствующих координат пересечения в плоскости z = 0 достаточно в уравнениях (12) вместо t подставить соответствующие времени  т.е.
т.е.
Здесь введены обозначения

Прямая (12) должна пересекаться в моменты времени  с проекциями осевых линий ИК лучей с номерами
с проекциями осевых линий ИК лучей с номерами  В параметрической форме осевая линия ИК луча под номером
В параметрической форме осевая линия ИК луча под номером  имеет вид
имеет вид
где  единичный вектор в направлении ИК луча под номером
единичный вектор в направлении ИК луча под номером  параметр - ∞ < U < ∞.
параметр - ∞ < U < ∞.
Выписывая уравнения для проекции прямой (14) rx, ry на оси x, y и полагая  исключаем параметр U и получаем
исключаем параметр U и получаем
Подставляя в (15) величины  из (13), получаем уравнение
из (13), получаем уравнение
Это уравнение содержит четыре неизвестных  для нахождения которых требуется четыре независимых уравнения. Последнее обеспечивается, если имеется не менее четырех различных ИК лучей с номерами
для нахождения которых требуется четыре независимых уравнения. Последнее обеспечивается, если имеется не менее четырех различных ИК лучей с номерами  проекции которых на плоскость z = 0 представляют собой не менее четырех различных прямых. Дальнейшие рассуждения аналогичны тем, что и при обосновании уравнений (5) и неравенства (6). В результате получаем систему уравнения (8) и неравенство (7).
проекции которых на плоскость z = 0 представляют собой не менее четырех различных прямых. Дальнейшие рассуждения аналогичны тем, что и при обосновании уравнений (5) и неравенства (6). В результате получаем систему уравнения (8) и неравенство (7).
Перейдем к пояснению выражений (9), (10). Из фиг. 1 видно, что при перемещении объекта из положения g1 в положение g2 происходит прерывание объектом, в частности, лучей  которые на объекте прописывают отрезки прямых
которые на объекте прописывают отрезки прямых  которые равны
которые равны
где смысл символов тот же, что и в выражениях (9). Если интенсивность звука от объекта позволяет определить  то, зная пространственное расположение ИК лучей прерываемых объектом, и тем самым пространственное расположение отрезка прямых
то, зная пространственное расположение ИК лучей прерываемых объектом, и тем самым пространственное расположение отрезка прямых  можно судить о габаритах и в какой-то степени о профиле объекта, особенно при достаточном числе ИК лучей
можно судить о габаритах и в какой-то степени о профиле объекта, особенно при достаточном числе ИК лучей 
В случае недостаточной интенсивности звука от объекта для того, чтобы определить скорости vx(t), vy(t), можно воспользоваться скоростями  определяемыми с помощью ИК лучей. Зная длительность прерывания объектом ИК луча с соответствующим номером, вычисляют по формуле (10) среднюю по времени и направлению длину отрезка прямой
определяемыми с помощью ИК лучей. Зная длительность прерывания объектом ИК луча с соответствующим номером, вычисляют по формуле (10) среднюю по времени и направлению длину отрезка прямой  совокупность которых с учетом пространственного расположения ИК лучей также дает представление о габаритах объекта.
совокупность которых с учетом пространственного расположения ИК лучей также дает представление о габаритах объекта.
Идентификация объекта водится к анализу совокупности данных о параметрах движения объект, его габаритах и особенно его звуковых образцах, в частности, к анализу спектральных составляющих звуковых образцов.
В настоящее время заявителям не известны объекты из анализа научной и патентной литературы, в которых есть признаки, являющиеся отличительными в заявленном техническом решении, то есть техническое свойство анализируемого объекта ново и не присуще известным объектам, в том числе и аналогу.
Таким образом, свойством, заключающимся в том, что согласно предполагаемому изобретению повышается эффективность охраны линии границы охраняемого участка, обладает объект, характеризуемый совокупностью признаков в полном объеме формулы, то есть техническое решение представляет собой новую совокупность признаков и нового технического свойства, то есть отвечает критерию "существенные отличия"е
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| КОМПЛЕКС СТРЕЛЬБОВОЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ ДЫМ-СК | 2008 |
|
RU2373483C1 |
| Мобильная система тревожной сигнализации | 2019 |
|
RU2712108C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ СЛУЧАЙНЫХ ВОЛНОВЫХ НЕОДНОРОДНОСТЕЙ СРЕДЫ, МЕНЯЮЩИХСЯ ВО ВРЕМЕНИ | 1995 |
|
RU2099690C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИНТЕНСИВНОСТИ РАССЕЯННОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2003 |
|
RU2242745C2 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
Изобретение относится к способам оптической и звуковой охранной сигнализации, в котором определяют параметры движения объекта, нарушающего границу охраняемого участка, и идентифицируют этот объект. Техническим результатом изобретения является определение параметров движения объекта, таких как вектор мгновенной скорости, вектор средней скорости по направлению и времени, траектория движения как функция времени, определение габаритов объекта, его идентификации, увеличение протяженности границ охраняемого участка и повышение эффективности его охраны. Способ заключается в том, что вдоль границы охраняемого участка выставляются устройства ИП в виде излучателя и фотоприемника, расположенных на штанге, которые оптически связаны между собой системой ИК-лучей, по которым передается информация о том, что в данном месте в известное время ИК-луч прерывается объектом, а также передается звуковая информация из области пересечения ИК-луча объектом. Анализ совокупности полученной информации позволяет определить параметры движения объекта и идентифицировать сам объект. 2 ил.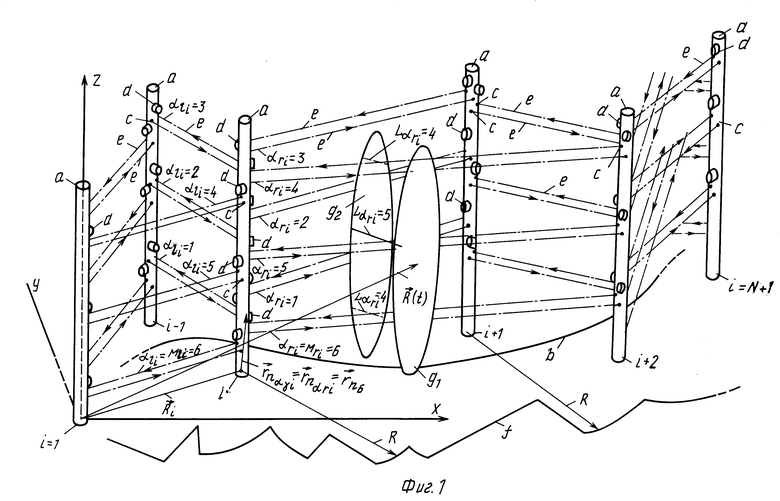
Способ определения параметров движения объекта и его идентификации, включающий подачу в фотоприемник сигналов тревоги, вызванных прерыванием объектом оптического луча, связывающего излучатель и фотоприемник, которые располагают вдоль границы охраняемого участка, отличающийся тем, что излучатель и фотоприемник сопрягают в одно устройство, называемое ИП, тиражируют его в количестве  штук и распределяют по N+1 штангам, при этом на i-й штанге, где i = 1,2,..., N+1, входящей в i-e устройство, называемое штанга с ИП, размещают 2Мi устройств ИП, в которых каждый из 2Мi пространственно независимых излучателей изготавливают так, что генерируемый им оптический луч представляет собой
штук и распределяют по N+1 штангам, при этом на i-й штанге, где i = 1,2,..., N+1, входящей в i-e устройство, называемое штанга с ИП, размещают 2Мi устройств ИП, в которых каждый из 2Мi пространственно независимых излучателей изготавливают так, что генерируемый им оптический луч представляет собой  где αi = 1,2,..., 2Мi, независимых оптических каналов, состоящий из
где αi = 1,2,..., 2Мi, независимых оптических каналов, состоящий из  различных последовательностей соосных оптических импульсов, причем каждая последовательность характеризуется номером
различных последовательностей соосных оптических импульсов, причем каждая последовательность характеризуется номером  1,2,.. .,
1,2,.. .,  и периодом
и периодом  при этом
при этом  если
если  и
и 
 кроме того, каждый из 2Мi указанных устройств дополняют элементами, позволяющими осуществлять с помощью оптических лучей прием различной информации, в том числе звуковой, по
кроме того, каждый из 2Мi указанных устройств дополняют элементами, позволяющими осуществлять с помощью оптических лучей прием различной информации, в том числе звуковой, по  независимым оптическим каналам из любых 2Мi независимых пространственных направлений и передачу этой информации по такому же числу К i независимых оптических каналов в любых других 2Мi пространственных направлениях, и используют в качестве элемента, обеспечивающего, в частности, дуплексную оптическую связь, для чего штанги с ИП выставляют в соответствии с их нормами i = 1,2,..., N+1 вдоль линии границы охраняемого участка в местах, определяемых вектором
независимым оптическим каналам из любых 2Мi независимых пространственных направлений и передачу этой информации по такому же числу К i независимых оптических каналов в любых других 2Мi пространственных направлениях, и используют в качестве элемента, обеспечивающего, в частности, дуплексную оптическую связь, для чего штанги с ИП выставляют в соответствии с их нормами i = 1,2,..., N+1 вдоль линии границы охраняемого участка в местах, определяемых вектором
где R по осям ортогональной координатной системы X, Y, Z, связанной с охраняемом участком, при этом
по осям ортогональной координатной системы X, Y, Z, связанной с охраняемом участком, при этом
где 1≤j ≤ N+1, j≠i, i+1 u ρj - половина максимального размера в поперечном сечении j-й штанги с ИП и каждую i-ю штангу с ИП оптически связывают, в том числе дуплексно, 2Мi ИК лучами с другими штангами с ИП таким образом, чтобы обеспечить дуплексную передачу информации вдоль границы охраняемого участка, и присваивают оптическим лучам номера αγi, где γ = l и αli = 1,2,...,Mli и γ = r и αri = 1,2,...Mri, при передаче к штангам с ИП с номерами f=i+1, i+2,..., i+Mri соответственно, причем Мli+Mri = 2Мi, и в системе координат, связанной с i-й штангой с ИП, помещают в местах, определяемых векторами  , где
, где  αγi = 1,2,...Mγi, γ=r,l,
αγi = 1,2,...Mγi, γ=r,l, 
где 
 однонаправленные микрофоны с ориентацией их рабочей стороны по направлению выходящих оптических лучей из i-й штанги с ИП, причем каждый из этих микрофонов электрически связывают только с одним своим независимым оптическим каналом передачи информации, кроме того, местоположения штанги с ИП, определяемые совокупностью векторов
однонаправленные микрофоны с ориентацией их рабочей стороны по направлению выходящих оптических лучей из i-й штанги с ИП, причем каждый из этих микрофонов электрически связывают только с одним своим независимым оптическим каналом передачи информации, кроме того, местоположения штанги с ИП, определяемые совокупностью векторов  выбирают так, чтобы для всех штанг с ИП с номерами, i, f, связанных между собой непосредственно через оптические лучи, выполнялись условия
выбирают так, чтобы для всех штанг с ИП с номерами, i, f, связанных между собой непосредственно через оптические лучи, выполнялись условия
где i-Mli≤f≤i+Mri;
R - радиус сферы действия микрофонов;
max(ρi, ρj) - максимальная по значению величина из двух величин ρi и ρj,
и любая точка линии границы охраняемого участка находилась в сфере действия микрофонов, помещенных на ближайшей к этой точке штанге с ИП и чтобы выбор местоположения штанг с ИП  вместе с подбором числа 2Мi оптических лучей, связывающих i-ю штангу с ИП с другими штангами с ИП, обеспечивал пересечение объектом, подлежащим идентификации, не менее четырех пространственно различных оптических лучей, проекции которых на плоскость Z= O представляли бы собой различные прямые, далее заблаговременно при отсутствии пересечения границы охраняемого участка объектом определяют средние по времени значения совокупности электрических амплитуд от звуковых сигналов
вместе с подбором числа 2Мi оптических лучей, связывающих i-ю штангу с ИП с другими штангами с ИП, обеспечивал пересечение объектом, подлежащим идентификации, не менее четырех пространственно различных оптических лучей, проекции которых на плоскость Z= O представляли бы собой различные прямые, далее заблаговременно при отсутствии пересечения границы охраняемого участка объектом определяют средние по времени значения совокупности электрических амплитуд от звуковых сигналов
где символ  означает совокупность всех величин
означает совокупность всех величин  , получающихся при изменении всех индексов в пределах их значений, и совокупности спектральных составляющих этих сигналов по частоте
, получающихся при изменении всех индексов в пределах их значений, и совокупности спектральных составляющих этих сигналов по частоте  в случае прерывания объектом ИК луча под номером α′γ′i′ информацию об этом передают на пульпы управления охранной системы штанг с ИП с номерами i=1 и i= N+1, где фиксируют номера штанг с ИП, в том числе и f=i', из совокупности i = i′-Mli′,..., i′+ Mri′, непосредственно связанных со штангой с ИП под номером i', момент времени
в случае прерывания объектом ИК луча под номером α′γ′i′ информацию об этом передают на пульпы управления охранной системы штанг с ИП с номерами i=1 и i= N+1, где фиксируют номера штанг с ИП, в том числе и f=i', из совокупности i = i′-Mli′,..., i′+ Mri′, непосредственно связанных со штангой с ИП под номером i', момент времени  соответствующий началу прерывания объектом ИК луча под номером α′γ′i′, и длительность прерывания этого луча
соответствующий началу прерывания объектом ИК луча под номером α′γ′i′, и длительность прерывания этого луча  и включает все микрофоны, расположенные на штангах с ИП под номерами j из совокупности i = i′-Mli′,..., i′+ Mri′ и работающие до тех пор, пока объект не минует все ИК лучи штанги с ИП под номерами i' и встречаются на пути объекта, то есть номер i' является функцией времени t, и передают на пульпы управления охранной системы звуковую информацию из области штанг с ИП под номером j из совокупности i = i′-Mli′,..., i′+ Mri′ и значения электрических амплитуд от звуковых сигналов как функций времени t и спектральные составляющие этих сигналов по частоте ω
и включает все микрофоны, расположенные на штангах с ИП под номерами j из совокупности i = i′-Mli′,..., i′+ Mri′ и работающие до тех пор, пока объект не минует все ИК лучи штанги с ИП под номерами i' и встречаются на пути объекта, то есть номер i' является функцией времени t, и передают на пульпы управления охранной системы звуковую информацию из области штанг с ИП под номером j из совокупности i = i′-Mli′,..., i′+ Mri′ и значения электрических амплитуд от звуковых сигналов как функций времени t и спектральные составляющие этих сигналов по частоте ω
соответственно, где номера j относятся к совокупности i = i′-Mli′,..., i′+ Mri′ анализируют амплитуды звуковых сигналов и их спектральные составляющие, проводят сравнение получаемых звуковых образов со звуковыми образами тех объектов, которые хранятся в памяти ЭВМ, определяют вектор  местоположения объекта, прерывающего оптические ИК лучи, из условия минимума функционала
местоположения объекта, прерывающего оптические ИК лучи, из условия минимума функционала
по величинам Rх, Rу, Rz u A, причем должно быть выполнено условие
и затем из условия минимума функционала
по параметрам  определяют эти параметры при выполнении условия
определяют эти параметры при выполнении условия  причем величины
причем величины  являются проекциями на оси координат Х, У вектора, характеризующего место, где происходит прерывание движущимся объектом первого оказавшегося на его пути оптического луча под номером
являются проекциями на оси координат Х, У вектора, характеризующего место, где происходит прерывание движущимся объектом первого оказавшегося на его пути оптического луча под номером  и начало этого прерывания происходит в момент времени
и начало этого прерывания происходит в момент времени  величины
величины  проекции на оси Х, У векторов
проекции на оси Х, У векторов  соответственно, где
соответственно, где  вектор, определяющий в системе координат, связанной с i-й штангой с ИП, местоположения излучателя, генерирующего ИК луч под номером
вектор, определяющий в системе координат, связанной с i-й штангой с ИП, местоположения излучателя, генерирующего ИК луч под номером  величины
величины  - являются проекциями на оси координат Х, У среднего значения по времени и направлению вектора скорости движения объекта, момент времени
- являются проекциями на оси координат Х, У среднего значения по времени и направлению вектора скорости движения объекта, момент времени  соответствует началу прерывания объектом оптического луча под номером
соответствует началу прерывания объектом оптического луча под номером  , величины
, величины  проекция на оси координат Х, У соответственно единичного вектора, направленного на оси оптического луча под номером
проекция на оси координат Х, У соответственно единичного вектора, направленного на оси оптического луча под номером  выходящего из i-й штанги с ИП, далее вычисляют совокупность величин
выходящего из i-й штанги с ИП, далее вычисляют совокупность величин  и
и  , где
, где
где символы  означают совокупности величин
означают совокупности величин  получающихся при изменении индексов
получающихся при изменении индексов  на те значения из них
на те значения из них  u 1≤i'≤ N+1, которые характеризуют оптические лучи, прерываемые объектом, учитывают пространственное расположение лучей с номерами
u 1≤i'≤ N+1, которые характеризуют оптические лучи, прерываемые объектом, учитывают пространственное расположение лучей с номерами  судят о габаритах объекта, сопоставляя все полученные данные по параметрам движения объекта Vх(t), Vу(t) и
судят о габаритах объекта, сопоставляя все полученные данные по параметрам движения объекта Vх(t), Vу(t) и  с данными о его габаритах и звуковом образе, причем с обоих пультов управления охранной системы, идентифицируют объект.
с данными о его габаритах и звуковом образе, причем с обоих пультов управления охранной системы, идентифицируют объект.
| Виноградов Ю.А., Электронная охрана, М., Символ -Р, 1996, с.3 - 7, 28 - 33 | |||
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2006949C1 |
| ОПТИЧЕСКОЕ ПЕРЕГОВОРНОЕ УСТРОЙСТВО | 1992 |
|
RU2042274C1 |
| Пассивная инфракрасная система обнаружения нарушителей | 1989 |
|
SU1640727A1 |
| Аппарат для экстрагирования жидкости | 1936 |
|
SU50751A1 |
| Иофе В.К | |||
| и др | |||
| Справочник по акустике, М., Связь, 1979 | |||
| Кизлюк А.И | |||
| Справочник по устройству и ремонту телефонных аппаратов зарубежного и отечественного производства, М., Библион, 1997, с.91. | |||
