Изобретение относится к области тренажеров для обучения управлению транспортными средствами и может быть использовано, преимущественно для контроля за точностью выполнения оператором (пилотом) заданного режима полета в процессе его обучения на авиационном тренажере.
Цель изобретения расширение функциональных возможностей за счет обеспечения контроля оператора при выполнении маловысотного полета с отслеживанием рельефа местности, маршрутного полета и атаки наземной цели.
На фиг.1 изображена блок-схема устройства, реализующего способ контроля деятельности оператора; на фиг.2 блок-схема блока формирования карты местности; на фиг. 3 блок-схема формирования прицельных параметров; на фиг.4 размещение элементов формата отображения информации для режимов маршрутного полета и маловысотного полета с отслеживанием рельефа местности; на фиг.5 размещение элементов формата отображения информации для режима атаки наземной цели.
Главным в реализации способа является представление инструктору авиационного тренажера необходимой информации на экране дисплея в определенных форматах ее отображения. Рассмотрим формирование информации для контроля деятельности оператора на авиационном тренажере на режимах маловысотного полета с отслеживанием рельефа местности и атаки наземной цели.
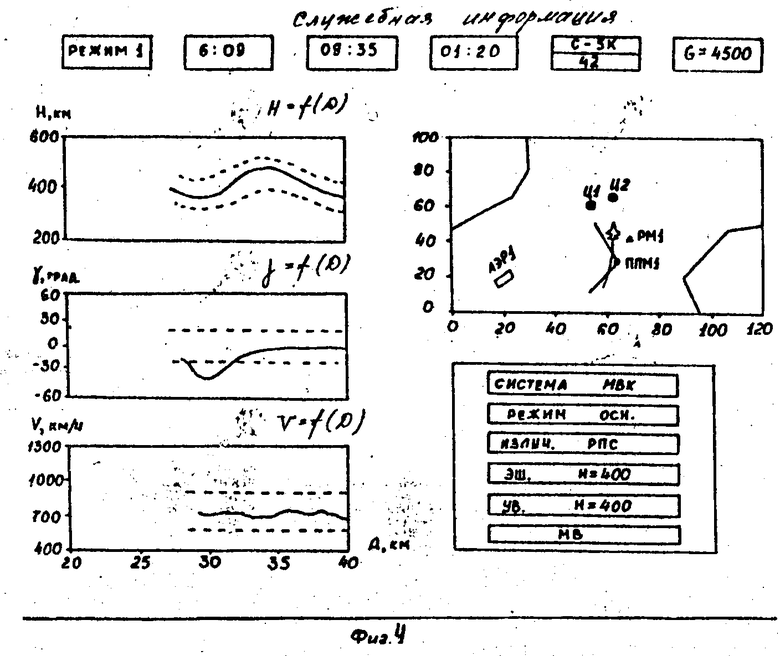
Для контроля деятельности оператора при выполнении маршрутного полета и маловысотного полета с отслеживанием рельефа местности (фиг.4) на экране дисплея отображается следующая информация:
графики зависимостей изменения по дальности высоты полета H t(Д), крена γ f(Д), скорости полета V f(Д) и допуска на отклонения этих параметров от заданных значений;
карта местности, включающая расположение наземных объектов (целей, аэродромов и др.), элементов маршрута (начальный пункт маршрута, поворотный пункт маршрута и др.), заданного и текущего маршрутов полета;
сигналы дискретных операций при работе с системой маловысотного контура (МВК);
служебная информация, включающая вид режима, текущее время, время выполнения режима, размещение и состав вооружения и т.п.
Указанный способ контроля оператора при выполнении на тренажере маршрутного полета с отслеживанием рельефа местности осуществляется следующим образом:
сравнивая текущие значения высоты, крена, скорости полета с допусками на отклонение этих параметров от заданных значений инструктор может оценить точность выдерживания расчетных параметров и качество директорного управления на рассматриваемом режиме:
карта местности обеспечивает возможность инструктору контролировать координаты и относительное расположение наземных объектов и моделируемого самолета, а также точность выдерживания заданного маршрута полета;
сигналы выполнения дискретных операций с системой МВК позволяют оценивать порядок и время выполнения операций при работе оператора с указанной системой.
Для контроля деятельности оператора при выполнении атаки наземной цели на экране дисплея отображается следующая информация:
графики зависимостей изменения по дальности до цели высоты полета Н f(Д) и области ее допустимого изменения, скорости полета V f(Д), перегрузки nу f(Д), крена γ f(Д) с отметками на них моментов выполнения дискретных операций с системой управления вооружением (СУВ);
карта местности с индукцией элементов наземной обстановки, целей и проекции траектории движения моделируемого самолета на горизонтальную плоскость;
прицельные параметры, включающие зависимости изменения угловых ошибок прицеливания по дальности в продольном εy f(Д) и боковом каналах управления εz f(Д), а также сетку прицела с подвижной и неподвижной метками и ошибки попадания в цель Rz, Rx.
служебная информация, включающая вид режима, текущее время, время выполнения режима, размещение и состав вооружения и т.п.
Способ контроля оператора при выполнении на тренажере атаки наземной цели осуществляется следующим образом:
сравнивая текущее значение высоты с областью ее допустимого изменения, инструктор может оценить точность выдерживания оператором расчетных параметров пилотирования в продольном канале управления;
карта местности обеспечивает возможность инструктору контролировать координаты и относительное расположение цели и моделируемого самолета, а по проекции траектории движения моделируемого самолета на горизонтальную плоскость оценивать правильность построения горизонтального маневра в процессе атаки цели;
сигналы выполнения дискретных операций с системой СУВ позволяют оценивать порядок и время выполнения операций при работе оператора с указанной системой;
прицельные параметры обеспечивают возможность инструктору контролировать точность прицеливания и степень поражения цели.
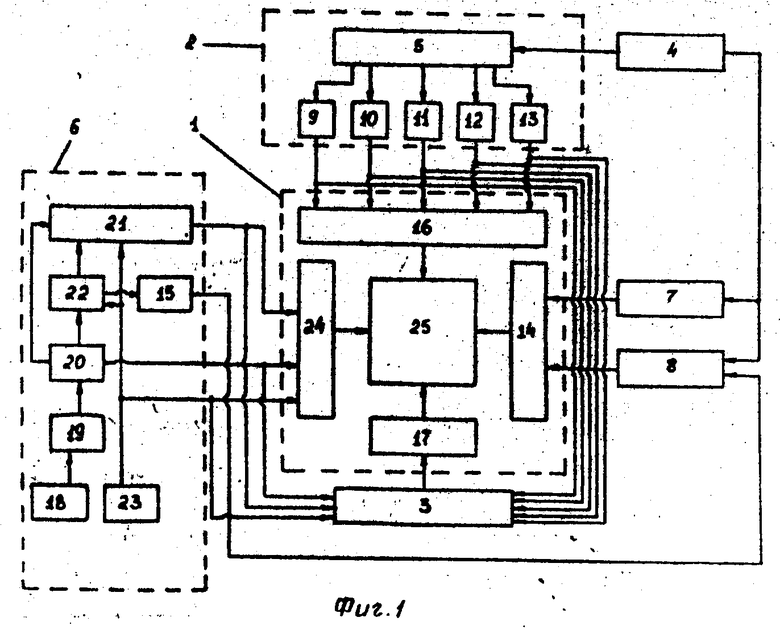
Способ контроля может быть реализован устройством, блок-схема которого представлена на фиг.1. Устройство содержит графический дисплей 1, задатчик 2 эталонных характеристик и допусков, блок 3 сравнения, магнитный накопитель 4, распределительный блок 5, тренажер 6, блок 7 формирования карты местности и блок 8 формирования прицельных параметров.
Магнитный накопитель 4 соединен с входом распределительного блока 5, входом блока 7 формирования карты местности и входом блока 8 формирования прицельных параметров. Выходы распределительного блока 5 соединены с блоком 9 формирования эталонных отклонений органов управления, блоком 10 формирования эталонных непрерывных управляющих воздействий, блоком 11 формирования эталонного дискретного управления, блоком 12 формирования заданной программы пилотирования, блоком 13 формирования границ допусков, входящих в задатчик эталонных характеристик и допусков. Выходы блока 7 формирования карты местности и блока 8 формирования прицельных параметров соединены с блоком 14 сопряжения графического дисплея. Второй вход блока 8 формирования прицельных параметров соединен с блоком 15 имитации системы управления вооружением. Выходы блоков 9-13 с входами блока 16 сопряжения графического дисплея 1 и блока 3 сравнения, который своим выходом соединен с блоком 17 сопряжения. Тренажер 6, содержащий последовательно соединенные блок 18 потенциометров, блок 19 аналого-цифрового преобразования, блок 20 тарировки, один из выходов которого соединен с блоком 21 формирования зависимостей текущих параметров движения и управления, блок 22 расчета параметров движения ЛА и блок 21, а также блок 23 цифровых входов, соединенный с другими входами блоков 21 и 22, соединен посредством выходов блоков 20, 21 и 23 с блоком 24 сопряжения графического дисплея 1 и блоком 3 сравнения. Выходы блоков 16, 17 и 24 сопряжения соединены с экраном 25 дисплея.
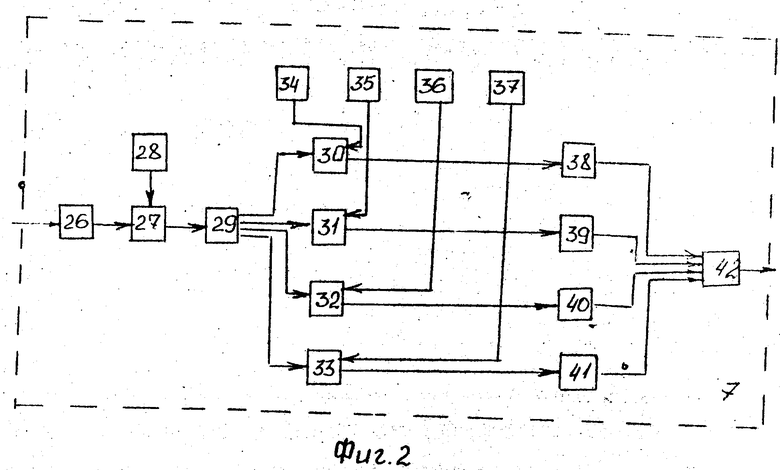
Блок 7 формирования карты местности содержит блок 26 преобразования двоичных кодов в двоично-десятичные, ключевую схему 27, первый переключатель 28, первое запоминающее устройство 29, ключевые схемы 30-33, переключатели 34-37, сумматоры 38-41, запоминающее устройство 42.
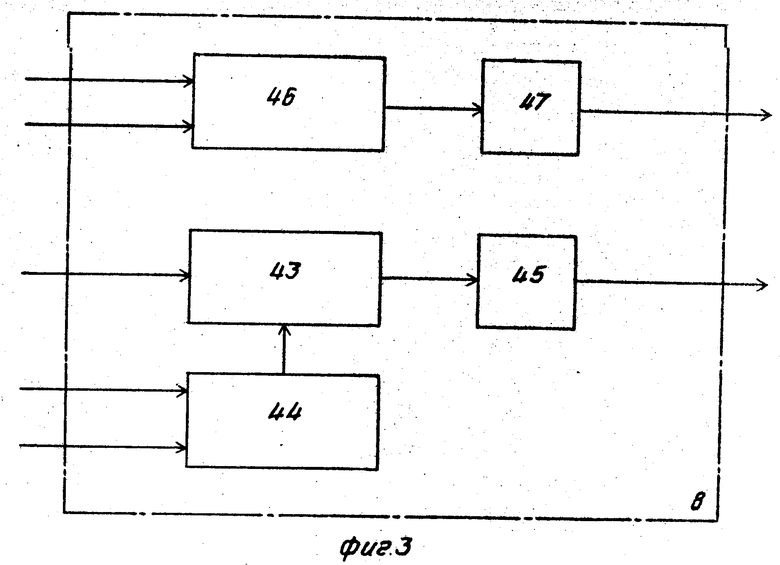
Блок 8 формирования прицельных параметров содержит первую ключевую схему 43, схему сравнения 44, первое запоминающее устройство 45, вторую ключевую схему 46 и второе запоминающее устройство 47.
Перед началом работы в устройство на магнитный накопитель 4 заносят информацию об эталонных зависимостях траекторных параметров, управляющих воздействий и отклонений органов управления летательного аппарата, сформированных по результатам летных испытаний, и дополнительно заносят информацию о расположении наземных объектов (координаты объектов) и динамические характеристики ракетного вооружения самолета. При включении устройства сигналы с магнитного накопителя 4, соответствующие координатам наземных объектов, поступают в блок 7 формирования карты местности, где они преобразуются согласно выбранным начальным условиям (вид режима, масштаб карты, тип цели, номер маршрута и т.п.) и поступают в блок 14 сопряжения графического дисплея. На режиме атаки цели в момент пуска ракет в блок 8 поступают сигналы управления вооружением из блока 15 имитации системы управления вооружением и сигналы текущего пространственного положения самолета из блока 22 расчета параметров движения летательного аппарата и затем осуществляется расчет траектории полета ракеты, а в момент попадания в цель расчет ошибки попадания и степень поражения цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ПРИ ИСПЫТАНИЯХ ТРЕНАЖЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
SU1833694A3 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |

Изобретение относится к области тренажеров для обучения управлению транспортными средствами и может быть использовано, преимущественно для контроля за точностью выполнения оператором (пилотом) заданного режима полета в процессе его обучения на авиационном тренажере и является усовершенствованием. Цель изобретения - расширение функциональных возможностей за счет обеспечения контроля оператора при выполнении маловысотного полета с отслеживанием рельефа местности, маршрутного полета и атаки наземной цели. В устройство, содержащее графический дисплей, задатчик эталонных характеристик и допусков, блок сравнения, магнитный накопитель, распределительный блок, тренажер, дополнительно включены блок формирования карты местности и блок формирования прицельных параметров. 2 с. и 2 з.п.ф-лы, 5 ил.
| Авторское свидетельство СССР N 1556393, кл | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
