Настоящее изобретение относится к созданию способа и устройства для направления транспортного средства без водителя вдоль направляющего кабеля, скрытого под поверхностью дороги, а более конкретно, к использованию двух детектирующих катушек, размещенных в соответствии с X-конфигурацией на транспортном средстве, для считывания вектора направления электромагнитного поля, не зависящего от пространственной и электромагнитной величин поля, причем эта информация используется для измерения бокового смещения транспортного средства относительно направляющего кабеля, для управления транспортным средством таким образом, чтобы отслеживать направляющий кабель.
На транспортном средстве без водителя установлены перпендикулярно размещенные катушки, которые используются для обнаружения электромагнитного поля, окружающего направляющий кабель, для осуществления автоматического направления транспортного средства без водителя вдоль направляющего кабеля. В известном устройстве обычно одна из катушек расположена вертикально, а другая катушка расположена горизонтально, или же они могут быть расположены по углом 45o к поверхности дороги (см. заявку Великобритании N 1092685, МПК G 05 D 1/02, 1967). Наведенные в катушках напряжения сравниваются и используются для определения бокового местоположения катушек относительно направляющего кабеля. Эта информация о местоположении обрабатывается и используется для управления транспортным средством.
Напряжение на выходе указанных катушек изменяется пропорционально частоте тока в направляющем кабеле, силе тока в направляющем кабеле, радиальному расстоянию от направляющего кабеля, размеру сердечника катушки, числу витков обмотки катушки и углу между основной осью катушки и линией, идущей от кабеля к центру катушки, который именуется углом бета.
Так как каждая катушка поворачивается в плоскости, перпендикулярной кабелю, создающему электромагнитное поле, то ее выходной сигнал становится максимальным, когда сердечник катушки параллелен круговым линиям магнитного потока. Выходной сигнал катушки становится минимальным (нулевым), когда сердечник катушки перпендикулярен потоку, т.е. направлен к обмотке или от нее. Таким образом, сигнал катушки изменяется в соответствии с синусом угла бета.
Термин sin (бета) отражает отношение радиального поля к круговому, которые замеряются в каждом положении катушки и воздействуют на выходной сигнал чувствительного элемента. Поэтому различие в величинах, замеряемых двумя катушками, зависит от радиуса, соответствующих расстояний между катушками и от тока кабеля. Изменение любого из этих факторов приводит к значительным изменениям выходного сигнала. Дополнительно, в зависимости от угла бета, некоторая информация радиального и/или кругового поля, связанная с обычной аппаратурой, которая получена в результате менее чем идеального соотношения сигнал/шум, должна быть отброшена. Другим недостатком известных взаимных расположений катушек является то, что информация, обеспечиваемая катушками, указывает только приблизительное боковое смещение относительно направляющего кабеля и не представляет собой измерение расстояния бокового смещения. Поэтому коррекция управления транспортным средством может быть произведена только в направлении, противоположном смещению, причем неточно.
Задачей настоящего изобретения является создание способа и устройства направления транспортного средства без водителя вдоль направляющего кабеля, расположенного под поверхностью дороги, которые позволяют измерять боковое отклонение транспортного средства от направляющего кабеля.
Другой задачей настоящего изобретения является создание устройства для направления транспортного средства без водителя вдоль направляющего кабеля, расположенного под поверхностью дороги, имеющего увеличенное "поле зрения" относительно кабеля по сравнению с известными устройствами.
Еще одной задачей настоящего изобретения является создание устройства, позволяющего получать информацию смещения от центра, необходимую для управления транспортным средством без водителя, на базе измеренного бокового смещения относительно направляющего кабеля, расположенного под поверхностью дороги, причем измеренное боковое смещение определено исключительно исходя из вектора направления электромагнитного поля и не зависит от всех составляющих величины полного электромагнитного поля.
Способ направления транспортного средства без водителя вдоль пути, определяемого направляющим кабелем, расположенным под горизонтальной дорожной поверхностью, причем по направляющему кабелю протекает ток, создающий электромагнитное поле в пространстве, окружающем направляющий кабель, согласно настоящему изобретению содержит операции: установки монтажа первой катушки, имеющей основную ось, расположенную под углом +45 градусов относительно горизонтали указанного транспортного средства; установки второй катушки, имеющей основную ось, расположенную под углом -45 градусов относительно горизонтали указанного транспортного средства, причем оси первой и второй катушек пересекаются; считывания обоих радиального и кругового векторов поля электромагнитного поля каждой катушки; сравнение величины радиального вектора с величиной кругового вектора для установления бокового положения точки пересечения осей катушек относительно кабеля (бокового смещения транспортного средства); передачи этой информации на блок управления для управления транспортным средством.
Устройство для направления транспортного средства без водителя вдоль пути, определяемого направляющим кабелем, расположенным под дорожной поверхностью, причем по направляющему кабелю протекает ток, создающий электромагнитное поле в пространстве, окружающем направляющий кабель, содержит чувствительный элемент для обнаружения направления и величины электромагнитного поля, окружающего кабель. Чувствительный элемент образован первой и второй смещенными друг относительно друга детектирующими катушками, основные оси, в соответствии с данным изобретением, которых расположены в соответствии с X-конфигурацией на указанном транспортном средстве таким образом, что основные оси пересекаются и ориентированы на угол, соответственно +45 и -45 градусов относительно дорожной поверхности. Каждая детектирующая катушка считывает векторы как радиального, так и кругового магнитного поля в заданной точке. Предусмотрены средства, связанные с первой и второй детектирующими катушками, которые сравнивают величину радиального вектора с величиной кругового вектора, за счет чего производится измерение бокового положения (смещения) чувствительного элемента относительно направляющего кабеля. Указанные средства сравнения выполнены делящими считанный радиальный вектор электромагнитного поля на круговой вектор. Полученное отношение пропорционально горизонтальному смещению чувствительного элемента (детектирующих катушек) и является сигналом управления, подаваемым на средства управления транспортным средством. Эти средства управления могут представлять собой цифровую или аналоговую систему управления.
Детектирующие катушки могут крепиться на транспортные средства посредством монтажной платы, причем целесообразно одну из них закреплять на одной стороне платы, а другую - на противоположной. Детектирующие катушки следует размещать с зазором друг относительно друга по крайней мере на величину ее длины с тем, чтобы измеряемое одной катушкой поле не нарушалось другой катушкой.
Указанные выше особенности и преимущества настоящего изобретения без труда станут ясны из последующего детального описания предпочтительного варианта осуществления изобретения, данного со ссылками на сопроводительные чертежи.
На фиг. 1 показан схематически вид спереди или сзади транспортного средства без водителя, которое может направляться вдоль направляющего кабеля, расположенного под дорожной поверхностью; на фиг. 2 приведена диаграмма, на которой показаны первая и вторая катушки, установленные в соответствии с настоящим изобретением под углом +/- 45 градусов относительно горизонтали, а также линии электромагнитного поля и векторы напряжения в электромагнитном поле, созданные направляющим кабелем, по которому протекает переменный ток; на фиг. 3 приведена блок-схема, на которой показаны различные напряжения в детектирующих катушках и их преобразование в выходной сигнал измерения расстояния смещения от центра; на фиг. 4 приведена блок-схема одного из вариантов осуществления изобретения.
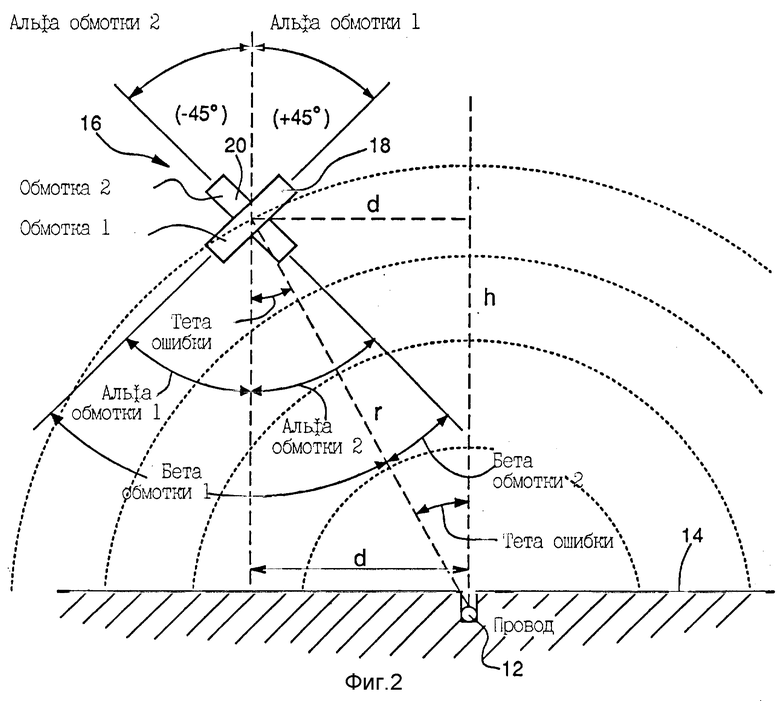
Обратимся теперь к рассмотрению фиг. 1, на которой показан вид спереди или сзади транспортного средства 10 без водителя, которое может следовать вдоль направляющего кабеля 12, расположенного в (под) горизонтальной дорожной поверхности 14. На транспортном средстве 10 установлен чувствительный элемент 16, который содержит две детектирующие катушки 18, 20. Одна из катушек 18 установлена под углом +45 градусов относительно дорожной поверхности 14, а другая катушка 20 установлена под углом -45 градусов.Термины +45 и -45 градусов относятся к углу оси катушки или ее сердечника относительно поверхности дороги 14 или относительно горизонтали. Оси катушек 16, 18 пересекаются в направлении протекания тока. По направляющему кабелю 12 протекает переменный ток, который, если нет его возмущений, создает электромагнитное поле с круговыми магнитными линиями, которые наводят (генерируют) в катушках 18 и 20 напряжения, которые могут быть использованы для измерения бокового смещения центра транспортного средства 10 относительно направляющего кабеля 12, и последующего управления транспортным средством для его направления вдоль кабеля.
Теперь с ссылками на фиг. 2-4 будет описано, каким образом осуществляется направление транспортного средства без водителя вдоль кабеля 12. Пунктирные линии на фиг. 2 показывают круговые векторы магнитного поля, окружающего направляющий кабель 12. Эти (силовые) линии поля предназначены для отображения случая, в котором вблизи от кабеля 12 нет ферромагнитных объектов или других носителей тока, которые могут нарушать поперечное круговое сечение линий поля. Положение по вертикали или высота h детектирующих катушек 18, 20 остается постоянной.
В результате монтажной (установочной) геометрии катушек 18, 20, когда каждая из основных осей расположена под углом +/- 45 градусов относительно горизонтали, каждая катушка создает выходное напряжение, которое является векторной суммой вертикальной и горизонтальной порций (составляющих) цилиндрического электромагнитного поля направляющего кабеля 12. Когда чувствительный элемент 16 отцентрирован над кабелем, тогда каждая катушка 18, 20 имеет одинаковые значения горизонтального и вертикального сигналов. Однако знаки сигналов противоположны, так как каждая катушка 18, 20 "видит" источник (сигнала) с разных сторон своей основной оси. Когда чувствительный элемент 16 смещен в боковом направлении влево или вправо относительно направляющего кабеля 12, выходной сигнал каждой катушки 18, 20 изменяется в функции суммы ее ориентации к горизонтальной плоскости (+/- 45 градусов) и угла ошибки Тета в вертикальной плоскости.
Сигнал или напряжение каждой из катушек максимальны, когда основная ось перпендикулярна к направляющему кабелю 12, и минимальны (равны нулю), когда ее основная ось направлена к направляющему кабелю (указывает на него). Так как эти катушки 18, 20 движутся в плоскости, параллельной кабелю 12, одновременно пересекая силовые линии его цилиндрического электромагнитного поля, то их выходные сигналы пропорциональны SIN (Бета обмотки 1 или 2).
Соответственно, истинное положение чувствительного элемента 16 или информация ошибки положения для цепи обратной связи, описанной далее, может быть найдено делением разницы радиальных векторов на сумму круговых векторов, считываемых катушками 18, 20. Истинный знак определяется тем, что сумма радиальных векторов делится на разницу круговых векторов, однако для работы фазового компаратора с контролем "безопасного управления" полярность катушек 18, 20 выбрана таким образом, что когда чувствительный элемент установлен (отцентрирован) над кабелем 12, выходной сигнал катушек смещен по фазе (расфазирован) на 180 градусов. Поэтому, когда чувствительный элемент 16 установлен над кабелем 12, векторы будут равны, но будут иметь противоположный знак, при этом радиальные векторы в числителе уничтожаются, в то время как круговые векторы удваиваются в знаменателе. Так как высота h остается положительной, т.е. чувствительный элемент 16 располагается над кабелем 12, то знаменатель никогда не достигает нуля и не вызывает неопределенности операции деления.
В соответствии с фиг.2 можно записать следующие уравнения:
Сигнал обмотки 1 = K1•SIN (Бета обмотки 1)
Сигнал обмотки 2 = K2•SIN (Бета обмотки 2)
Поэтому:
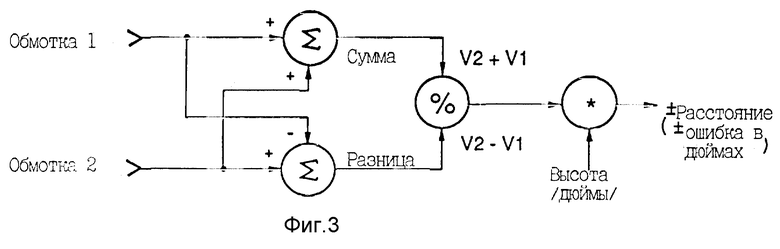
Расстояние (+/- ошибка) = Высота•(Сигнал обмотки 2 + Сигнал обмотки 1)/ (Сигнал обмотки 2 - Сигнал обмотки 1).
Последующее является математическим доказательством приведенного уравнения линейного измерения.
По определению:
Углы по часовой стрелке относительно вертикали положительные.
Радиус r определен как расстояние/линия между центром катушек 18, 20 и центром кабеля 12.
Ток определен как электрический ток в обмотке.
Частота определена как частота тока.
Высота h является расстоянием по вертикали от кабеля до горизонтальной плоскости, в которой могут перемещаться катушки 18, 20.
Расстояние d(+/-) представляет собой горизонтальное расстояние от кабеля до центра катушек.
Угол альфа катушки 1 является углом смещения от вертикали катушки 1 (+45).
Угол альфа катушки 2 является углом смещения от вертикали катушки 2 (-45).
Тета является углом ошибки между радиусом и высотой.
и
K1 пропорционален току, частоте и индуктивности и обратно пропорционален радиусу.
Сигнал обмотки 1 = K1•SIN (Бета обмотки 1) (уравнение 1)
Сигнал обмотки 2 = K1•SIN (Бета обмотки 2) (уравнение 2).
Из фиг. 2 можно видеть:
Бета обмотки 1 = Тета-Альфа обмотки 1
и
Бета обмотки 2 = Тета-Альфа обмотки 2,
при этом когда Тета=Альфа обмотки 1, Бета обмотки 1 приближается к нулю, а когда Тета=Альфа обмотки 2, Бета обмотки 2 приближается к нулю.
Поэтому:
Сигнал обмотки 1 = K1•SIN (Тета-Альфа обмотки 1) (уравнение 3).
Сигнал обмотки 2 = K2•SIN (Тета-Альфа обмотки 2) (уравнение 4).
С использованием тригонометрического тождества:
SIN(A-B)= SIN(A)•COS(B)-COS(A)•SIN(B)
уравнения 3 и 4 могут быть представлены следующим образом:
Сигнал обмотки 1 = K1•(SIN(Тета)•COS(Альфa обмотки 1) - COS (Тета)•SIN(Альфа Обмотки 1)
(уравнение 5)
Сигнал обмотки 2 = K1•(SIN(Тета)•COS(Альфa обмотки 2) - COS (Тета)•SIN (Альфа Обмотки 2)
(уравнение 6)
и так как по определению:
Альфа обмотки 1 = +45 градусов и Альфа обмотки 2 = - 45 градусов, то
SIN (Альфа обмотки 1) = COS (Альфа обмотки 1) = SIN (Альфа обмотки 2) = COS (Альфа обмотки 2),
при всех значениях, равных (Квадратному корню из 2)/2, что приблизительно равно 0,707...
Из показанной на фиг.2 геометрии можно также видеть, что:
SIN (Тета) = Расстояние/Радиус = d/r
и
COS (Тета) = Высота / Радиус = h /r.
Теперь уравнения 5 и 6 могут быть упрощены заменой:
Сигнал Обмотки 1 = K1•(d/h•0,707 - h/r•0,707)
Сигнал Обмотки 2 = K1•(d/h•0,707 - h/r•-0,707)
или когда
Сигнал обмотки 1 = K'•(d-h) K'= (K1•0,707/r
Сигнал обмотки 2 = K'•(d+h)
Для нахождения искомой ошибки расстояния (положения)(+/-d) относительно высоты (h) чувствительного элемента, выходные сигналы обмоток должны быть скомбинированы следующим образом:
(Сигнал обмотки 2 + Сигнал обмотки 1)/ (Сигнал обмотки 2 - Сигнал обмотки =
[K'•((d+h) +(d-h))] /[K'•((d+h)-(d-h))] =[K'•d+h+d-h]/ [K'•d+h - d-h] = 2d/2h=d/h=Расстояние/Высота.
Поэтому:
Расстояние (+/-ошибка) = Высота•(Сигнал обмотки 2 + Сигнал обмотки 1)/(Сигнал обмотки 2 - Сигнал обмотки 1).
Это выражение может быть реализовано при помощи комбинации известных устройств управления транспортным средством без водителя, как это показано на блок-схеме фиг. 3.
Из рассмотрения фиг. 3 можно видеть, что для реализации указанного выражения требуются операции простого сложения, вычитания, умножения и деления, что может быть выполнено средствами аналоговой или цифровой электроники. Также легко могут быть выполнены дополнительные операции согласования по уровню и форме сигнала, то есть фильтрация, аналого-цифровая демодуляция и аналого-цифровые преобразования.
Для использования чувствительного элемента 16 с целью сохранения знака информации, выходные сигналы катушек 18, 20 должны быть синхронно демодулированы.
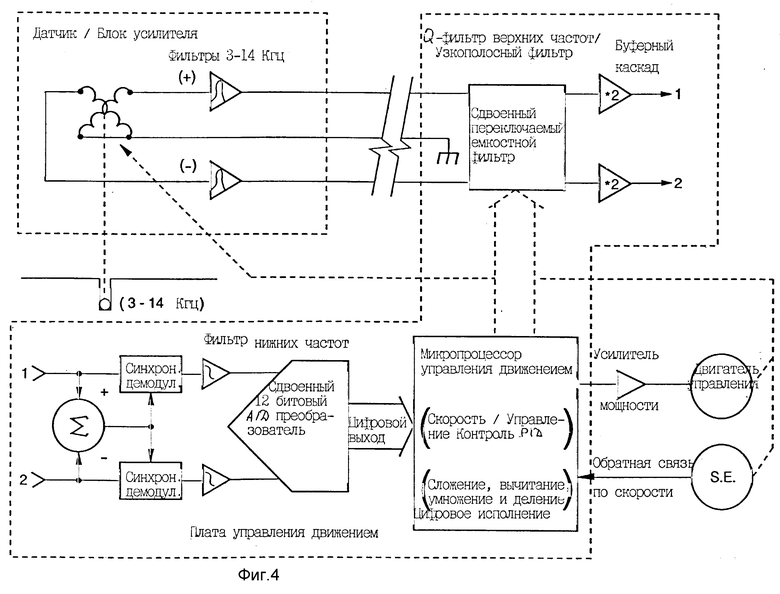
На фиг. 4 в виде блок-схемы иллюстрируется способ внедрения чувствительного элемента 16 с X-конфигурацией катушек в систему управления транспортного средства 10 без водителя.
На фиг. 4 представлен пример описанной ранее X-конфигурации катушек, предназначенной для транспортного средства 10, управляемого при рабочей высоте 3 дюйма над 100-миллиамперным направляющим кабелем, обеспечивающим аппаратурную ширину "безопасного управления" +/- 3 дюйма. Однако для случаев, когда высота чувствительного элемента выше или ниже, может быть использована программная характеристика "безопасного управления", описанная далее, так что чувствительный элемент 16 может перекрывать диапазон высот от 1 до 6 дюймов. При использовании АРУ цифровой блок управления может работать в диапазоне токов кабеля от 20 до 400 мА, в диапазоне высот от 1 до 6 дюймов и в диапазоне горизонтального смещения +/-12 дюймов.
При использовании Q-фильтров верхних частот и синхронных демодуляторов отсекаются все посторонние сигналы, не синхронные по частоте и фазе. Однако одним сигналом, который не отсекается, является сигнал "обратного среза" от соседнего кабеля. Этот сигнал обратного среза может искажать электромагнитное поле, смещая нулевой уровень чувствительного элемента. Это искажение вызывает сдвиг нуля, который находится в прямо пропорциональной зависимости от расстояний чувствительного элемента до каждого из кабелей, то есть, если высота составляет 3 дюйма и обратный срез равен 24 дюймам, то нуль будет сдвинут на 3/24 единичного выходного положения (3 дюйма, умноженные на высоту 3 дюйма), или 3/24•3 = 3/8 дюйма, причем направление сдвига нуля зависит от фазы "обратного среза". На половине расстояния между двумя кабелями любой сигнал считывается как результирующий круговой вектор, при этом результат деления стремится к нулю. Линейность также падает в диапазоне от 10 до 12 дюймов в результате "обратного среза", который ближе 20 футов. По этим причинам выходной сигнал чувствительного элемента устанавливается соответствующим +/- полной шкалы при +\- 8 дюймах горизонтального перемещения.
Соответственно, значительно увеличено поле зрения чувствительного элемента 16 без потери направлений левого/правого борта. Это улучшает процедуру повторного захвата "беспроводного маневра". При значительно улучшенной линейности и обеспечении токов на высоте чувствительного элемента транспортного средства все выходные сигналы обладают одинаковым соотношением +/- 8 дюймов, что обеспечивает регулировки беспроводного управления +/-4 дюйма, для учета "обратного среза" и/или для центровки (транспортного средства) в нагруженном состоянии.
Как более широкое "поле зрения", так и хорошая линейность обеспечивают вариабильность запрограммированных пределов "безопасного управления". Эта характеристика оказалась очень полезной при контроле "беспроводного маневра", так как технические требования ANSI (Американского национального института стандартов) допускают для таких операций окно +/- 6 дюймов. Внутренние аппаратные фазовые компараторы обеспечивают первичный выходной сигнал "безопасного управления". Однако это окно не устанавливается на +/- 3 дюйма для всех высот чувствительных элементов.
При X-конфигурации катушек +/- окно "безопасного управления" становится равным высоте h катушек 18, 20 над проводом (направляющим кабелем), то есть для чувствительно элемента 16, установленного на высоте 3 дюйма над проводом, окно "безопасного управления" будет составлять +/- 3 дюйма и может изменяться на +/- 1/2 дюйма, если глубина провода изменяется на +/- 1/2 дюйма. Под контролем бортового микропроцессора цифровые программные средства управления обеспечивают один или два активных сигнала "безопасного управления".
Несмотря на то, что предпочтительный вид осуществления изобретения был описан детально, специалисты в данной области могут найти различные альтернативные варианты и решения для осуществления изобретения, которое определяется следующей патентной формулой.
Заявленные способ и устройство предназначены для направления движения транспортного средства по электрическому кабелю, уложенному на (под) поверхности дороги. Технический результат изобретения заключается в увеличении "поля зрения" относительно кабеля и измерении для целей управления бокового смещения транспортного средства исходя из вектора направления электромагнитного поля. На транспортном средстве устанавливают две смещенные относительно друг друга детектирующие катушки, имеющие Х-конфигурацию с расположением осей под углом 1-45° относительно поверхности дороги. Каждая катушка считывает как радиальный, так и круговой векторы магнитного поля, сравнение которых позволяет определить величину смещения транспортного средства относительно направляющего кабеля. 2 с. и 7 з.п. ф-лы, 4 ил.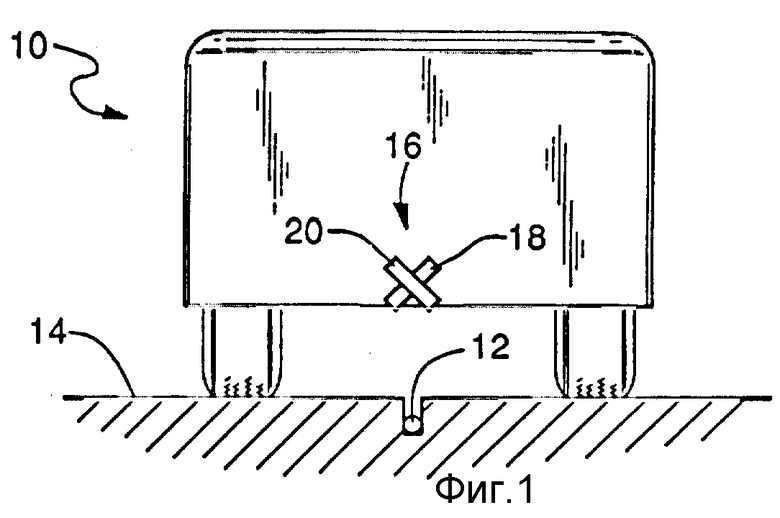
| Электропривод постоянного тока | 1983 |
|
SU1092685A1 |
| Устройство для автоматической подмазки контактных проводов электротранспорта | 1984 |
|
SU1234245A1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
