Изобретение относится к беспилотным летательным аппаратам (БЛА) вертикального взлета и посадки (ВВП) и, в частности, к БЛА с тороидальным фюзеляжем и парой соосных несущих винтов, вращающихся в противоположных направлениях в кольцевом канале, образованном фюзеляжем, и обеспечивающих способность вертикального взлета и посадки. На такой БЛА для ведения наблюдения с земной поверхности установлены дистанционно управляемый, внешний, складываемый в транспортировочное положение блок воспринимающих приборов и/или складывающееся шасси.
В последнее время возрос интерес к использованию беспилотных летательных аппаратов (БЛА) в самолетной и/или вертолетной конфигурации для решения множества задач, выполнение которых пилотируемыми летательными аппаратами в силу различных причин нецелесообразно. В число таких задач входят наблюдение, разведка, захват цели и/или целеуказание, сбор и накопление данных, связь и передача данных, запуск ложных целей, активное радиоэлектронное противодействие, отвлечение противника или полеты с грузом без возврата. С недавних пор исследуется приспособленность БЛА вертолетного типа к выполнению задач наблюдения с земной поверхности.
Существуют многочисленные задачи наблюдения, выполнению которых в особой степени способствуют достоинства БЛА вертолетного типа. Например, способность БЛА вертолетного типа вертикального взлетать и приземляться делает их применение особенно предпочтительным в тех случаях, когда площадки ведения наблюдения удалены, когда нахождение на них сопряжено с опасностью и/или когда они недоступны с применением других средств. Во многих случаях требования, обусловливаемые характером задач ведения наблюдения, делают неэффективным применение стационарных воспринимающих систем, работающих, к примеру, с видеосигналами, акустическими сигналами, фиксирующими перемещение. Кроме того, выполнение многих задач наблюдения не под силу человеку, так как они могут быть сопряжены с опасностью или требовать наблюдения из многих точек в течение короткого периода времени.
Вот некоторые из задач, связанных с наблюдением, особенно успешно решаемых БЛА ВВП: обзор пограничной зоны, распространение информации, радиометрический контроль зоны бедствия, обзор зон, закрытых для доступа, экологический мониторинг, геологические/сейсмические наблюдения. При выполнении задачи патрулирования пограничной зоны БЛА ВВП может быть направлен к участкам возможного пересечения границы и скрытно приземлен там. Для выполнения скрытного наблюдения за участком возможного пересечения границы блок воспринимающих приборов может включаться автоматически или дистанционными командами. В зависимости от конкретных условий блок воспринимающих приборов может иметь компоновку, обеспечивающую возможность наблюдения в мультиспектральном режиме. Данные, полученные воспринимающими приборами, могут передаваться на удаленный центр наблюдения для их обработки в масштабе реального времени и принятия решения. Что касается задачи распространения информации, БЛА ВВП может ее выполнять с исключительно высокой эффективностью, поскольку способность БЛА к вертикальному взлету и посадке может обеспечить наиболее оперативный или даже единственно практически осуществимый способ доступа к площадкам, с которых необходимо получить информацию. БЛА ВВП направляется к такой площадке, приземляется там, после чего блок воспринимающих приборов включается в режим вещания и/или записи видеоинформации и/или аудиоинформации с места события. БЛА ВВП способен в целях улучшения условий съемки быстро изменять свое положение или перемещаться по команде на другую точку. Распространение видео- и/или аудиоинформации с сильно рассредоточенных площадок может легко осуществляться с помощью одного БЛА ВВП, не требующего многочисленной съемочной команды или транспортировочного оборудования.
БЛА ВВП могут быть развернуты для наблюдения в районах стихийных бедствий, например, разлившихся рек или разрушенных мостов, дорог, зданий. БЛА ВВП может быть дистанционно приземлен в районах бедствий, где блок воспринимающих приборов будет передавать данные, позволяющие оценить масштаб бедствия, заранее предупредить об усугублении процесса его развития и/или выявлять наличие возможности жертв. После проведения на основе данных, дистанционно переданных блоком воспринимающих приборов, оценки ситуации в одном пункте зоны бедствия, БЛА ВВП может быть передислоцирован в другой пункт для выполнения аналогичной задачи. При использовании в интересах правоохранительных органов БЛА ВВП может быть направлен в потенциально/реально криминогенные пункты, например, зоны, закрытые для доступа, места, где совершаются преступления. Блок воспринимающих приборов включается в работу с целью скрытной передачи информации с места события. Использование БЛА ВВП для обзора криминогенных зон исключает необходимость привлечения персонала правоохранительных органов для выполнения этой работы, связанной с опасностью для жизни. БЛА ВВП могут быть быстро развернуты в местах химического заражения с целью сбора соответствующих данных с применением, например, видео-, химических детекторов, что позволило бы оценить тяжесть последствий заражения и/или спланировать действия по их ликвидации и средства для этого. Применение БЛА ВВП устраняет риск для здоровья людей, решающих эти задачи. БЛА ВВП могут также найти применение для выявления случаев нелегального сброса токсичных отходов. Также БЛА ВВП могут использоваться для дистанционного наблюдения за вулканической или сейсмической деятельностью. БЛА ВВП могут использоваться при составлении сейсмических карт удаленных, недоступных районов.
Помимо рассмотренных в предыдущих абзацах типовых задач наблюдения, относящихся к гражданской сфере деятельности, существуют перспективы применения БЛА ВВП и в военной сфере. Задачи ведения наблюдения здесь имеют невысокий приоритет, поэтому, хотя они могут выполняться и пилотируемыми летательными аппаратами, но последние могут быть задействованы в решении более важных задач. БЛА ВВП, наоборот, может выполнять такие задачи, как дозорная служба или дистанционная разведка, имеющие низкую степень приоритета в общей совокупности военных задач. Кроме того, применение БЛА ВВП исключает опасность для жизни военнослужащих и во многих случаях, например при дистанционной разведке, решает поставленные задачи более оперативно.
В статье журнала "Aviation Week & Space Technology" от 7 марта 1994 г. описывается беспилотный летательный аппарат (БЛА) "CYPHERTM", разрабатываемый фирмой "Сикорски Эйркрафт", г. Стрэтфорд, штат Коннектикут. БЛА "CYPHERTM" имеет форму тороида и соосные несущие винты противоположного вращения, обеспечивающие способность БЛА к вертикальному взлету и посадке. Описанный БЛА "CYPHERTM" представлен на иллюстрациях с жестко закрепленным шасси полозкового типа, т.е. в виде треножной конструкции с одной пятой на каждой опоре, изготовленной из высокопрочного стекловолокна. БЛА "CYPHERTM" оборудован комплектом воспринимающих приборов, составляющих его полезную нагрузку включающих в себя стандартную видеокамеру, размещенную внутри тороидального фюзеляжа и интегрированную в планер летательного аппарата, полностью выполненный из композиционных материалов. Видеокамера в полете может поворачиваться в вертикальной плоскости, в то время как изменение ее азимутальной ориентации возможно только за счет эволюций БЛА "CYPHERTM". Запланированный вариант применения БЛА "CYPHERTM" называется "Аэромобильная система контроля безопасности с земной поверхности", согласно которому БЛА "CYPHERTM" выводится в заданные районы и приземляется для контроля обстановки в заданном районе путем передачи видеоинформации оператору.
Потребность в БЛА ВВП, способном с земной поверхности выполнять задачи дистанционного наблюдения и/или мониторинга, существует. Такой БЛА ВВП должен дистанционно пилотироваться и останавливать/запускать силовую установку с целью увеличения продолжительности его применения и повышения скрытности, если это необходимо. БЛА ВВП должен обладать способностью нести на борту блок воспринимающих приборов, который может предназначаться для ведения мультиспектрального наблюдения/мониторинга при любой погоде. Информация, собираемая и передаваемая блоком воспринимающих приборов с борта БЛА ВВП, должна быть удобочитаема персоналом центра дистанционного управления (ЦДУ). Блок воспринимающих приборов БЛА ВВП должен быть быстросъемным для обеспечения компактности и транспортабельности БЛА ВВП. Сам БЛА ВВП должен уметь приземляться в режиме дистанционного управления на неподготовленные площадки, а также быть приспособленным к посадке на площадки различного рельефа. БЛА ВВП должен уметь передавать информацию о характеристике площадки приземления. Кроме того, БЛА ВВП должен передавать информацию с блока воспринимающих приборов на ЦДУ в масштабе реального времени.
Задачей изобретения является создание беспилотного летательного аппарата (БЛА), который имеет тороидальный фюзеляж и несущий винт, состоящий из пары коаксиально расположенных винтов противоположного вращения, установленных на тороидальном фюзеляже и создающих подъемную силу, обеспечивающую вертикальный взлет и посадку (ВВП), и который для ведения наблюдения с земной поверхности оборудован внешним, дистанционно управляемым, складывающимся в транспортировочное положение блоком воспринимающих приборов и/или складывающимся шасси.
Другой задачей изобретения является разработка для применения на БЛА ВВП блока воспринимающих приборов, способного в целях ведения наблюдения выполнять сканирование в горизонтальной плоскости по углам азимута и в вертикальной плоскости в пределах заданных углов возвышения/понижения.
Следующая задача изобретения заключается в обеспечении возможности развертывания блока воспринимающих приборов в рабочее положение для ведения наблюдения с земной поверхности, а также его складывания для транспортирования БЛА.
Эти и другие задачи, положенные в основу настоящего изобретения, решаются в виде беспилотного летательного аппарата (БЛА), который имеет тороидальный фюзеляж и несущий винт, состоящий из пары коаксиальных винтов противоположного вращения, установленных на тороидальном фюзеляже и создающих подъемную силу, обеспечивающую вертикальный взлет и посадку БЛА. БЛА в одном варианте выполнения оборудован для ведения наблюдения с земной поверхности дистанционно управляемым, внешним, складывающимся в транспортировочное положение блок воспринимающих приборов, способным в целях наблюдения с земной поверхности выполнять сканирование в горизонтальной плоскости по азимуту и в вертикальной плоскости в пределах заданных углов возвышения/понижения, а также складывающимся шасси, обеспечивающим возможность посадки БЛА на неподготовленные площадки.
Складывающееся шасси состоит из нескольких ног, пяты с опорной плитой, шарнирно прикрепленной ко второму концу каждой ноги, а также несиловых шарниров, соединяющих ноги с тороидальным фюзеляжем, причем первый конец каждой ноги прикреплен к тороидальному фюзеляжу. Применение несиловых шарниров позволяет складывать шасси в транспортировочное положение, при этом каждая нога шасси вместе с шарнирной пятой убирается в пределы контура тороидального фюзеляжа.
Блок воспринимающих приборов имеет несколько опорных стоек, одним концом шарнирно соединенных с тороидальным фюзеляжем, при этом опорные стойки имеют возможность поворачиваться при установке блока воспринимающих приборов в рабочее, развернутое, положение и при его складывании в транспортировочное положение. Блок воспринимающих приборов имеет также контейнер с поворотной подставкой и механизм крепления, соединяющий опорные стойки с поворотной подставкой таким образом, что контейнер может поворачиваться в пределах заданных угловых ограничений, обеспечивая блоку воспринимающих приборов возможность сканирования по углу возвышения/понижения. Поворотная подставка установлена на механизме крепления с возможностью вращения, а на самой поворотной подставке расположено устройство управления азимутальной ориентацией, взаимодействующее с механизмом крепления и предназначенное для вращения поворотной подставки относительно механизма крепления, что позволяет блоку воспринимающих приборов выполнять сканирование по азимуту. На поворотной подставке установлен по крайней мере один прибор, воспринимающий и передающий данные результатов наблюдения с земной поверхности.
В альтернативном варианте по крайней мере один прибор, воспринимающий и передающий дополнительные данные результатов наблюдения, установлен хотя бы на одной опорной плите шарнирной пяты.
Изобретение, его особенности и достоинства более детально представлены в следующем подробном описании, излагаемом со ссылками к прилагаемым чертежам.
Фиг. 1 - вид в аксонометрической проекции, с частичным вырезом, варианта беспилотного летательного аппарата (БЛА), имеющего тороидальный фюзеляж и несущий винт в виде пары винтов противоположного вращения, создающих подъемную силу и обеспечивающих способность БЛА к вертикальному взлету и посадке (ВВП).
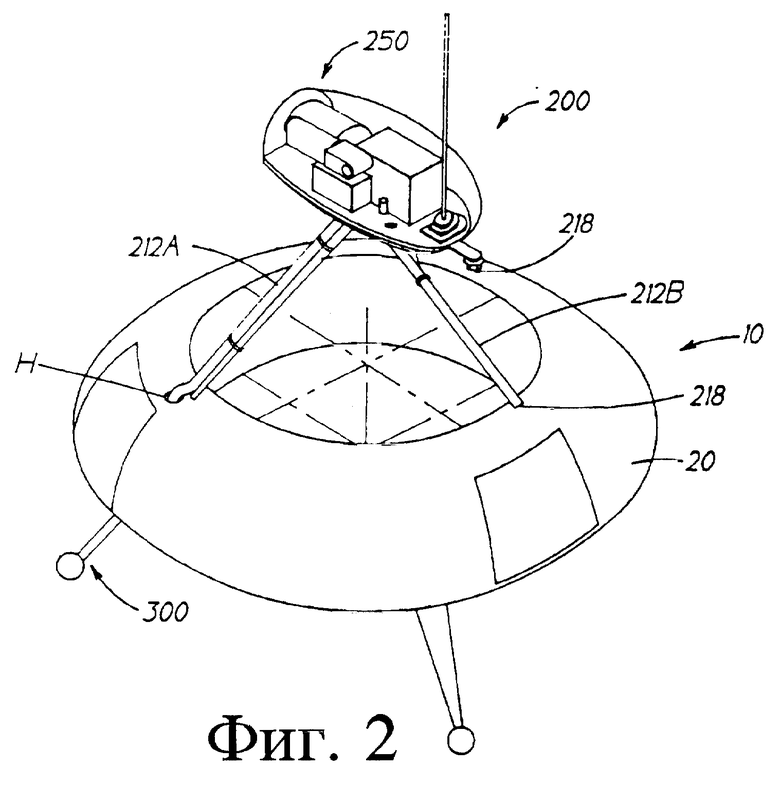
Фиг. 2 - вид в аксонометрической проекции БЛА ВВП согласно настоящему изобретению, оснащенного внешним, дистанционно управляемым блоком воспринимающих приборов, а также имеющего шасси.
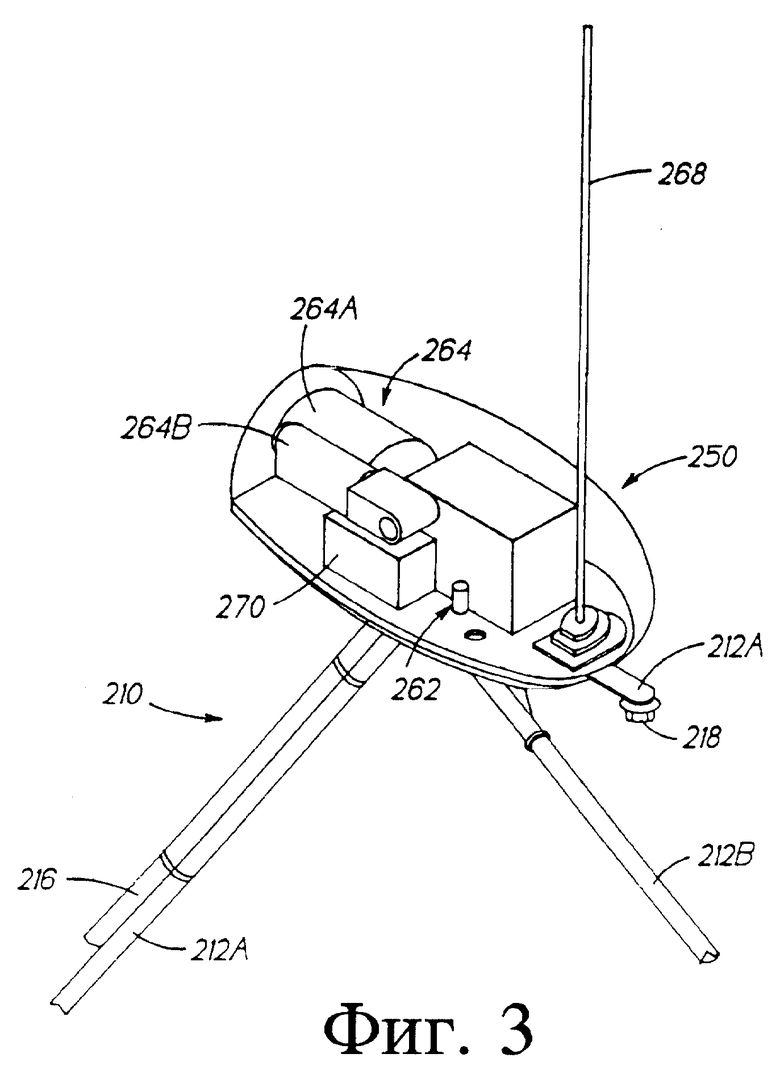
Фиг. 3 - вид в аксонометрической проекции внешнего, дистанционного управляемого блока воспринимающих приборов, показанного на фиг. 2.
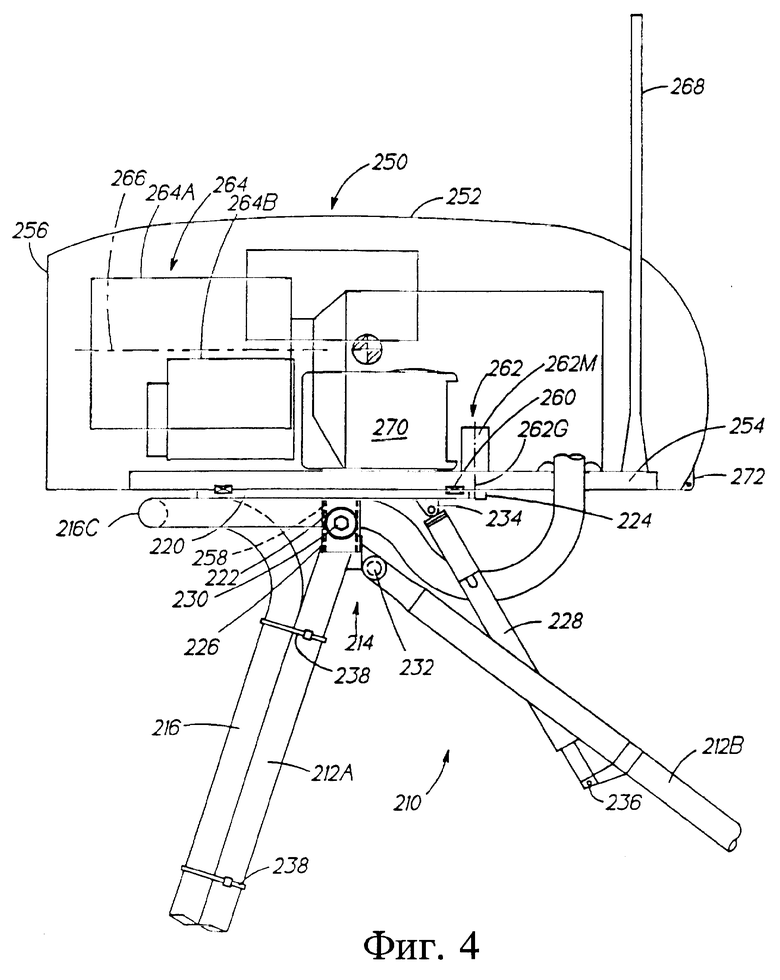
Фиг. 4 - вид частично разделенного внешнего, дистанционно управляемого блока воспринимающих приборов, показанного на фиг. 3.
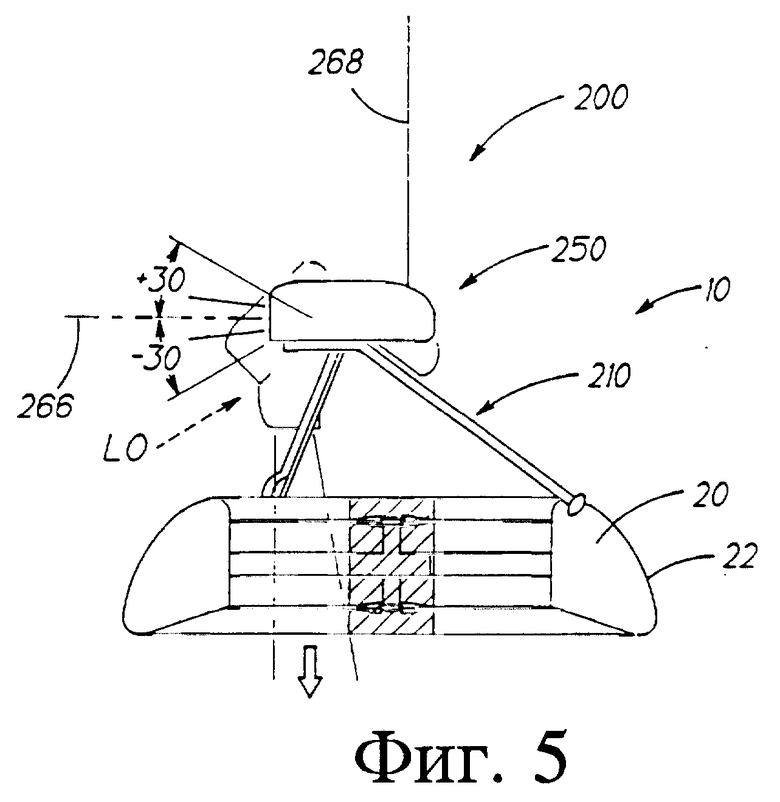
Фиг. 5 иллюстрирует способность внешнего, дистанционно управляемого блока воспринимающих приборов, показанного на фиг. 2, выполнять сканирование по углу возвышения/понижения.
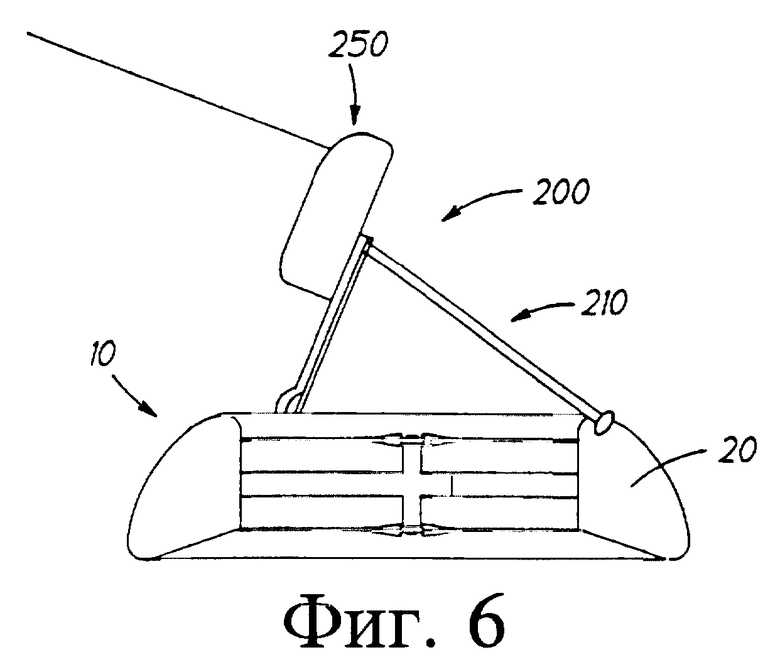
Фиг. 6 показывает начальный этап процесса складывания внешнего, дистанционно управляемого блока воспринимающих приборов, показанного на фиг. 2, в транспортировочное положение.
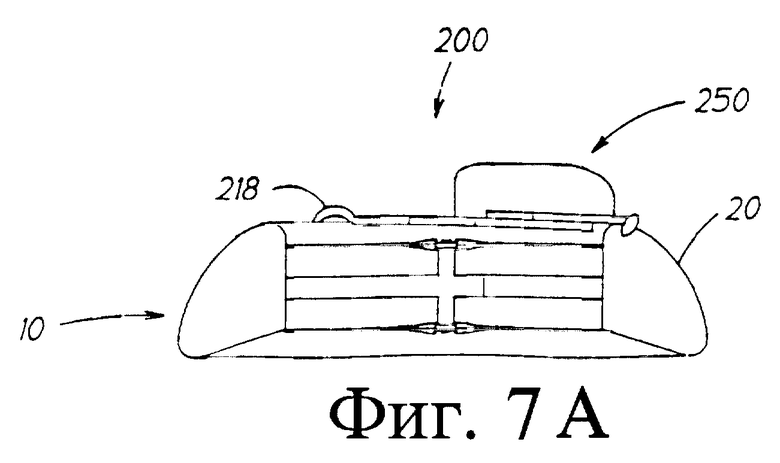
Фиг. 7A - вид сбоку внешнего, дистанционно управляемого блока воспринимающих приборов, показанного на фиг. 2, находящегося в транспортировочном положении.
Фиг. 7B - вид сверху блока воспринимающих приборов в транспортировочном положении, отображенном на фиг. 7A.
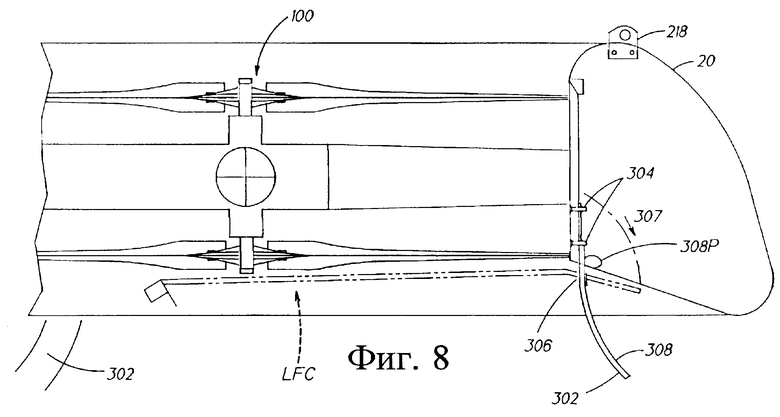
Фиг. 8 - частичный разрез БЛА ВВП согласно фиг. 2, показывающий фрагмент шасси.
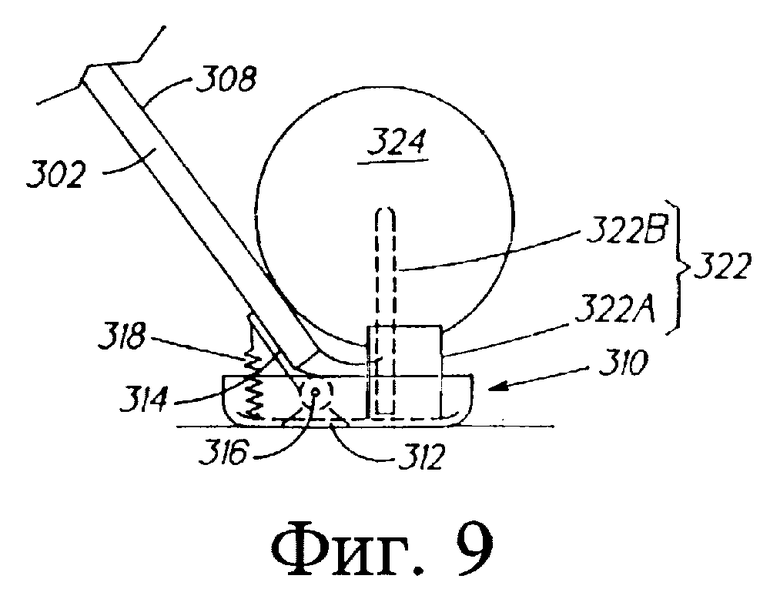
Фиг. 9 - вид сбоку типовой пяты ноги шасси, показанного на фиг. 2.
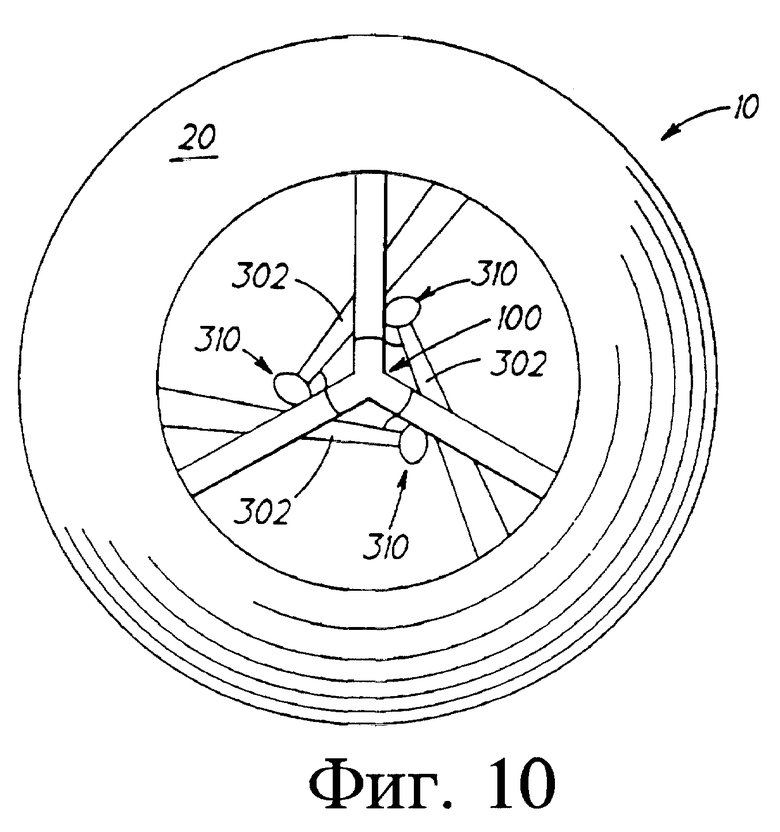
Фиг. 10 - вид сверху БЛА ВВП, показывающий ноги складывающегося шасси в транспортировочном положении.
Обратимся к чертежам, на которых идентичные или подобные элементы конструкции обозначены единой нумерацией позиций. На фиг. 1 показан один из вариантов беспилотного летательного аппарата (БЛА) 10' "CYPHERTM", разработанного фирмой "Сикорски Эйркрафт" "CYPHERTM" - товарный знак подразделения "Сикорски Эйркрафт" компании "Юнайтид Текнолоджиз Копэрейшн". "БЛА CYPHERTM" 10' имеет тороидальный корпус или фюзеляж 20 и пару соосных винтов несущего винта 100, вращающихся в кольцевом канале, образованном фюзеляжем, в противоположных направлениях. Несущий винт 100 обеспечивает способность выполнения БЛА 10' вертикального взлета и посадки (ВВП). Тороидальный фюзеляж 20 обладает аэродинамическим профилем, который может быть оптимизирован с точки зрения уменьшения момента кабрирования, возникающего в прямолинейном полете, что раскрывается подробно в патенте США N 5150857 на изобретение под названием "Геометрия корпуса беспилотных летательных аппаратов". Аэродинамический профиль также может быть полуцилиндрическим, как описано в патенте США N 5152487 на изобретение под названием "Беспилотный летательный аппарат с соосным несущим винтом, размещенным внутри тороидального корпуса и управляющим летательным аппаратом по всем каналам управления".
БЛА "CYPHERTM" 10' в рассматриваемой компоновке имеет тороидальный фюзеляж 20, диаметр которого примерно равен 1,98 м, а максимальная высота примерно равна 0,49 м. Пустой вес летательного аппарата составляет около 79,37 кг, полный вес - около 113,38 кг. Ось фюзеляжа БЛА 10' обозначена на фиг. 1 позицией 12. Тороидальный фюзеляж 20 имеет несколько (в рассматриваемом варианте - три) полых распорных штанг 24, выполненных как одно целое с внутренней периферической частью тороидального фюзеляжа 20, расположенных радиально и соединяющих тороидальный фюзеляж с несущим винтом 100. Распорные штанги жестко скреплены со стационарной частью несущего винта 100 и служат для его центрирования относительно тороидального фюзеляжа 20, т.е. такой фиксации, при которой ось вращения несущего винта 100 совпадает с осью 12 фюзеляжа.
С целью обеспечения высокой прочности при минимальном весе предпочтительным материалом для изготовления тороидального фюзеляжа 20 и распорных штанг 24 является композиционный материал. Специалистам хорошо известны различные типы волокнистых материалов с высокой прочностью на разрыв и смол, применяемых при изготовлении конструкций аэрокосмических аппаратов. Для обеспечения максимальной прочности конструкции тороидальный фюзеляж изготавливается в виде замкнутого тороида. Тороидальный фюзеляж 20 представляет собой частично полую конструкцию и содержит несколько внутренних отсеков 26 с панелями с возможностью доступа в них. Рассматриваемый предпочтительный вариант тороидального фюзеляжа 20 БЛА 10' "CYPHERTM" более подробно раскрыт в патенте США N 5277380 на изобретение под названием "Конструкция тороидального фюзеляжа для беспилотных летательных аппаратов с соосным несущим винтом, вращающимся в кольцевом канале, образованном фюзеляжем".
Как описывается ниже, внутренние отсеки 26 обычно используются для размещения различного полетного и специального оборудования 30. Специальное оборудование 32, представляющее собой полезную нагрузку БЛА, предпочтительно (но не обязательно) размещается в переднем внутреннем отсеке 26 (с углом азимута 180 относительно направления прямолинейного полета) тороидального фюзеляжа 20. Обычно специальное оборудование 32 включает в себя какой-либо пассивный воспринимающий прибор (приборы), например, инфракрасный детектор (детекторы), телекамеру (телекамеры) и т.д., и/или активные устройства, такие как лазерный аппарат (аппараты), аппаратура радиосвязи, радиолокатор и т. д. Кроме того, в состав специального оборудования входит сопряженная обрабатывающая аппаратура, определяющая способность БЛА 10' "CYPHERTM" выполнять такие воздушные задачи, как наблюдение, разведка и/или наведение на цель, и передний внутренний отсек 26 обеспечивает хорошее поле обзора для этого специального оборудования 32. Другое полетное и специальное оборудование 30, например радиоэлектронная аппаратура 34, навигационное оборудование 36, вычислитель управления полетом 38, аппаратура связи 40 (предназначенная для трансляции данных, полученных воспринимающим прибором в масштабе реального времени, а также для приема команд управления в масштабе реального времени), бортовой источник энергоснабжения, такой как заряжаемый аккумулятор (показанный, к примеру, под номером 42), антенны и т.д. распределены по различным внутренним отсекам 26, как показано в качестве примера на фиг. 1. Оптимизация распределения полетного и специального оборудования 30 совместно с размещением силовой установки 50 выполнена исходя из весовых и балансировочных требований летной эксплуатации БЛА 10' "CYPHERTM".
Вычислитель управления полетом 38 управляет режимами полета БЛА 10' "CYPHERTM", включая взлет и посадку. Вычислитель 38 может хранить в памяти заранее составленные программы выполнения этапов полета, таких как взлет, посадка, крейсерский полет, активизируемые сигналами дистанционного управления. Вычислитель управления полетом 38 также отрабатывает управляющие сигналы, посланные средствами центра дистанционного управления (ЦДУ), при этом средства ЦДУ могут видоизменять программу любого этапа полета или вмешиваться в процесс ее выполнения БЛА 10'.
В состав силовой установки 50 входит один или несколько топливных баков 52, двигатель 54, трансмиссия (на чертежах не показана), передающая мощность, развиваемую двигателем 54, на несущий винт 100. Трансмиссия включает в себя вал привода (не показан), проходящий от двигателя 54 к несущему винту 100 внутри одной из полых распорных штанг 24. Топливные баки 52 размещены в отведенных для них внутренних отсеках 26, расположенных предпочтительно напротив друг друга, по азимутальным углам 90 и 270o (боковые отсеки). Такая схема размещения баков способствует постоянству центровки БЛА 10' "CYPHERTM" в полете. Двигатель 54 установлен во внутреннем отсеке 26 так, чтобы уравновешивать топливные баки 52, а также полетное и специальное оборудование 30. Работа двигателя 54 управляется и контролируется вычислителем управления полетом 38. Устройство силовой установки 50 обеспечивает возможность выполнения дистанционно управляемых остановки и повторного запуска двигателя 54 посредством вычислителя управления полетом 38.
Конструкция БЛА 10' "CYPHERTM" может содержать экран 14, фрагмент которого показан на фиг. 1, защиты входного устройства несущего винта 100 от попадания посторонних предметов. Для аналогичной защиты выходного устройства несущего винта 100 БЛА 10' может также иметь экран выходного устройства (не показан). Другие конструктивные и функциональные особенности силовой установки 50, трансмиссии и несущего винта 100, включающего в себя электронную исполнительную подсистему управления, верхний и нижний автоматы перекоса, набор тяг управления шагом лопастей, втулку с соосной передачей вращения на разнесенные по обе стороны роторы несущего винта, шлицевые конусные установочные узлы, верхний и нижний многолопастные роторы противоположного вращения, описаны в патенте США N 5281099 на изобретение под названием "Объединенный шлицевой конусный установочный узел для несущего винта с соосными винтами, вращающимися в кольцевом канале в противоположных направлениях". Поскольку вышеупомянутые конструктивные и функциональные особенности БЛА 10' не являются определяющими для понимания сущности настоящего изобретения, их подробности в целях краткости изложения опущены.
На фиг. 2 изображен беспилотный летательный аппарат (БЛА) 10 "CYPHERTM" согласно настоящему изобретению и обладающий теми конструктивными и функциональными особенностями, которые были раскрыты в предшествующих абзацах. БЛА 10 по настоящему изобретению имеет конфигурацию для выполнения задач наблюдения с земной поверхности, рассмотренных выше. Для выполнения задач по наблюдению с земной поверхности БЛА 10 оснащен внешним, дистанционно управляемым блоком воспринимающих приборов 200 и/или складывающимся шасси 300, на которое могут быть установлены воспринимающие приборы для выполнения некоторых задач наблюдения. БЛА 10 по настоящему изобретению оснащен воспринимающими приборами, предназначенными для ведения наблюдения с земной поверхности, поэтому специальное, размещаемое внутри фюзеляжа, оборудование 32, например, пассивные воспринимающие приборы и/или активные устройства, состав которого применительно к варианту БЛА 10' "CYPHERTM" рассмотрен выше, решающее такие задачи, как наблюдение и разведка с воздуха и/или наведение на цель, отсутствует. Внутренние отсеки 26, предназначенные для размещения такого специального оборудования 32, могут быть перепрофилированы под размещение оборудования, сопряженного с внешними блоками воспринимающих приборов БЛА 10, например, оборудования обработки данных, запоминающих устройств и/или связного оборудования и т. п. , дополнительных топливных баков 52, увеличивающих радиус действия БЛА 10, и/или дополнительных заряжаемых аккумуляторных батарей 42, увеличивающих продолжительность работы блока (блоков) воспринимающих приборов в режиме наблюдения.
Внешний, дистанционно управляемый блок воспринимающих приборов 200 имеет характеристики, позволяющие при ведении наблюдения с земной поверхности выполнять многоракурсное сканирование в пределах угла 360o по азимуту и угла возвышения/понижения 60o (с отклонением угла поворота шарнира от плоскости линии статического визирования, равным ±30o). Кроме того, характеристики блока воспринимающих приборов 200 должны обеспечивать возможность восприятия данных через вращающиеся винты несущего винта 100, что позволяет оценить состояние посадочной площадки. Такая возможность позволяет дистанционно передислоцировать БЛА 10 "CYPHERTM", включая выполнение этапов взлета, перелета на новую точку наблюдения и посадки на неподготовленную площадку. Размещение блока воспринимающих приборов 200 по высоте примерно соответствует положению человека-наблюдателя, поэтому данные, передаваемые приборами, легко воспринимаются и анализируются средствами ЦДУ, управляющими функционированием БЛА 10 при выполнении задачи. Блок воспринимающих приборов 200 выполнен складывающимся для уменьшения объема БЛА 10 в транспортировочном положении и облегчения его транспортировки.
Как видно на фиг. 3...8, внешний, дистанционно управляемый блок воспринимающих приборов 200 включает в себя механизм крепления 210 и контейнер 250. Механизм крепления состоит из нескольких опорных стоек 212 (причем три опорные стойки 212A, 212A, 212B образуют треножную конструкцию, обеспечивающую требуемую устойчивость контейнера 250 и одновременно минимальный вес механизма крепления 210), средств шарнирного соединения 214 контейнера 250 на треноге, образованной опорными стойками 212, соединительного жгута 216, шарнирных опор 218, которые установлены на конце каждой опорной стойки 212 треноги, удаленном от контейнера 250 воспринимающих приборов (см. фиг. 2, 3). Каждая шарнирная опора 218, в свою очередь, укреплена на тороидальном фюзеляже 20 БЛА 10 "CYPHERTM", как это показано, например, на фиг. 2. Опорные стойки 212 треноги могут поворачиваться относительно шарнирных опор 218 на фюзеляже, что позволяет складывать блок воспринимающих приборов 200 в транспортировочное положение способом, подробно рассматриваемым ниже, и улучшить транспортабельность БЛА 10 по земле, по воздуху или по воде перед применением БЛА по назначению.
Для рассматриваемого варианта внешнего, дистанционно управляемого блока воспринимающих приборов 200 в средства его шарнирного соединения 214 входит платформа 220, имеющая крепежную цилиндрическую ось 222, пристыкованную, зубчатое кольцо 224, прилегающее к ее периферии, кронштейн 226 платформы и привод 228 с линейной характеристикой. Кронштейн 226 платформы, выполненный в виде серьги, шарнирно соединен с крепежной осью 222 таким образом, что платформа 220 может поворачиваться относительно кронштейна 226 платформы (ось этого шарнира обозначена на фиг. 4 позицией 230). Концы опорных стоек треноги 212A, удаленные от шарнирных опор 218, соединены с кронштейном 226 платформы неразъемным способом. Соединение конца опорной стойки треноги 212B, удаленного от шарнирной опоры 218, с кронштейном 226 платформы - разъемное, посредством быстросъемного пальца 232.
Привод 228 с линейной характеристикой, который в представленном варианте представляет собой винтовой домкрат, одним концом соединен с платформой 220 посредством шарнирного узла 234, а вторым концом - разъемным способом с опорной стойкой 212B посредством быстросъемного пальца 236. Привод 228 с линейной характеристикой управляется дистанционно, т.е. управляющими сигналами, передаваемыми средствами ЦДУ, и обеспечивает поворот контейнера 250 воспринимающих приборов по углу возвышения/понижения, при котором платформа 220 поворачивается относительно кронштейна 226 платформы, т.е. вокруг оси шарнира 230, на угол, величина которого лежит в заданном диапазоне, в результате чего отклоняется по углу возвышения/понижения линия визирования воспринимающих приборов, размещенных в контейнере 250. Как показано на фиг. 5 (шасси 300 в развернутом положении для простоты не показано), в рассматриваемом варианте изобретения контейнер 250 способен в стандартном режиме работы отклоняться вверх на угол до +30o над плоскостью оси статического визирования и вниз на угол -30o ниже плоскости оси статического визирования, требуемый для введения наблюдения с земной поверхности. Кроме того, привод 228 с линейной характеристикой в нестандартном режиме работы может наклонять контейнер 250 вниз (как правило, по управляющим сигналам, вырабатываемым программой посадки, хранящейся в памяти вычислителя управления полетом 38) так, что его ось статического визирования проходит через вращающийся несущий винт 100 (посадочная ориентация контейнера 250 обозначена на фиг. 5 символами "LO"). В этом положении блок воспринимающих приборов передает данные, позволяющие на расстоянии оценить состояние выбранной посадочной площадки в точке наблюдения после того, как БЛА 10 "CYPHERTM" начал отрабатывать программу посадки. По управляющим сигналам, либо переданным со средств ЦДУ, либо выработанным программой вычислителя БЛА, выполняется выдвижение/втягивание привода 228 с линейной характеристикой, поворачивающего платформу 220 относительно кронштейна 226 платформы, т.е. вокруг шарнирной оси 230, в результате чего ось статического визирования контейнера 250, а вместе с ней линия визирования воспринимающих приборов, размещенных в контейнере 250, поворачивается по углу возвышения/понижения.
Соединительный жгут 216 в рассматриваемом варианте выполнения БЛА 10 "CYPHERTM" обеспечивает энергоснабжение и/или подачу управляющих сигналов на контейнер 250 воспринимающих приборов и/или передает информацию с контейнера 250 воспринимающих приборов на сопряженное оборудование обработки, размещенное во внутреннем отсеке 26 БЛА 10. Контейнер 250 воспринимающих приборов может иметь конструкцию, обеспечивающую автономность его функционирования в плане энергоснабжения, управления, обработки информации, полученной воспринимающими приборами, однако такая автономность повлечет за собой соответствующее увеличение габаритов и веса контейнера, что может неблагоприятно сказаться на весовых и балансировочных летных характеристиках БЛА 10. Применение соединительного жгута 216, позволяющее разместить источник энергоснабжения 42, приемопередатчик управляющих сигналов 40 и/или оборудование обработки данных, функционально связанные с контейнером 250 воспринимающих приборов, внутри тороидального фюзеляжа 20 БЛА 10, является практичным подходом, упрощающим достижение приемлемых весовых и балансировочных летных характеристик БЛА 10. Соединительный жгут 216 закреплен на одной из опорных стоек посредством монтажных хомутов 238. Один конец жгута 216 проходит через отверстие H (см. фиг. 2) в тороидальном фюзеляже 20 и подсоединяется, как это требуется, к внутреннему источнику энергоснабжения 42, аппаратуре связи 40 и/или оборудованию обработки/хранения в памяти информации, сопряженному с контейнером 250 воспринимающих приборов. Другой конец соединительного жгута 216 вводится в контейнер 250 воспринимающих приборов, обеспечивая согласно данному описанию подключение соответствующих элементов блока воспринимающих приборов 200. Жгут 216 имеет форму петли рассчитанных размеров (петля обозначена позицией 216C на фиг. 4), при этом слабина жгута в петле позволяет контейнеру 250 воспринимающих приборов свободно вращаться по азимуту в пределах 360o, что ниже описывается более подробно.
Как видно на фиг. 3, 4, контейнер 250 воспринимающих приборов имеет корпус 252, содержащий поворотную подставку 254 и открытую концевую стенку 256. Поворотная подставка 254 имеет пристыкованную цилиндрическую крепежную ось 258, вставляемую в цилиндрическую крепежную ось 222 платформы 220 и тем самым устанавливающую поворотную подставку 254 на платформе 220. Таким образом, поворотная подставка 254, а вместе с ней и контейнер 250 воспринимающих приборов наклоняются вверх/вниз синхронно с платформой 220, как описано выше. Между поворотной подставкой 254 и платформой 220 установлен кольцевой подшипник 260, благодаря чему поворотная подставка 254 может вращаться относительно платформы 220 (т. е. цилиндрическая крепежная ось 258 может свободно вращаться внутри цилиндрической крепежной оси 222).
Внутри корпуса 252 контейнера, на поворотной подставке 254, установлен дистанционно управляемый механизм 262 управления азимутальной ориентацией, управляющий азимутальной ориентацией контейнера 250 воспринимающих приборов относительно платформы 220. В представленном варианте выполнения БЛА 10 "CYPHERTM" механизм 262 управления азимутальной ориентацией содержит электродвигатель 262M, приводящий во вращение ведущее зубчатое колесо 260G. С помощью управляющих сигналов (передаваемых со средств ЦДУ или вырабатываемых прикладной программой выполнения задачи из встроенного пакета программного обеспечения) включается электродвигатель 262M, вращающий ведущее зубчатое колесо 260G, которое зацепляется с зубцами зубчатого колеса 224 платформы 220, вращая поворотную подставку 254 относительно платформы 220, в результате чего изменяется азимутальная ориентация статической оси визирования контейнера 250 воспринимающих приборов.
Также на поворотной подставке 254 установлены один или несколько воспринимающих приборов 264. Типовой состав воспринимающих приборов 264, размещаемых в контейнере 250, обычно определяется из условия, что БЛА 10 "CYPHERTM" должен обеспечивать ведение наблюдения и/или мониторинга в мультиспектральном режиме и при любой погоде. К примеру, в рассматриваемом варианте выполнения БЛА 10 оснащен инфракрасной системой обзора передней полусферы (ИКСО) 264A и системой телевизионной передачи изображения малой освещенности (ТПИМО) 264B. Специалисту понятно, что тип и/или количество воспринимающих приборов 264, устанавливаемых в контейнере 250, зависит главным образом от типа решаемых БЛА 10 задач наблюдения с земной поверхности, а также внешних условий, влияющих на эффективность их выполнения. Например, система ИКСО 264A подошла бы к выполнению задачи наблюдения за пограничной зоной в ночное время, но может оказаться непригодной для выполнения той же задачи в дневное время, в то время как система ТПИМО 264B является пригодной для введения наблюдения в дневное время, особенно при низком уровне освещенности, например, при густой облачности. Наличие открытой концевой стенки 256 корпуса контейнера 252 способствует улавливанию и/или распространению электромагнитного (например, инфракрасного, видимого и т.п.) излучения воспринимающими приборами 264. В альтернативном выполнении концевая стенка может быть закрытой, при этом она изготавливается из материала, пропускающего электромагнитное излучение тех частотных спектров (например, видимого, инфракрасного), которые улавливаются/распространяются воспринимающими приборами 264.
На фиг. 4, 5 позицией 266 обозначена ось статического визирования контейнера 250 воспринимающих приборов, т.е. приблизительная центральная линия поля обзора воспринимающих приборов 264, установленных в контейнере 250. При условии, что внешний, дистанционно управляемый блок воспринимающих приборов 200 и складывающееся шасси 300 находятся в развернутом состоянии (см. фиг. 2), ось статического визирования 266 направлена примерно горизонтально по отношению к земной поверхности на высоте, соответствующей среднему росту человека-наблюдателя, поэтому информация от воспринимающих приборов 264 может легко восприниматься персоналом, обслуживающим средства ЦДУ. Базовое направление оси статического визирования 266 соответствует азимутальному углу 180o в системе отсчета БЛА 10 "CYPHERTM" (см. фиг. 5). Угол возвышения/понижения и/или поворота поворотной подставки 254 может отсчитываться от нового, измененного по сравнению с базовым, направления оси статического визирования 266.
На поворотной подставке может быть установлена антенна, воспринимающая излучение на расстоянии непрямой видимости 268, соединенная (при необходимости) с соединительным жгутом 216, с приводом 228 с линейной характеристикой, механизмом 262 управления азимутальной ориентацией и/или воспринимающими приборами 264. Применение антенны 268 улучшает способность БЛА 10 "CYPHERTM" принимать управляющие сигналы со средств ЦДУ на этапе подготовки БЛА 10 к посадке или в случае расположения точки наблюдения вне зоны прямой видимости ЦДУ.
На поворотной подставке 254 могут также устанавливаться средства 270 ориентации контейнера. Средства 270 ориентации контейнера предназначаются для формирования данных о пространственной ориентации поворотной подставки 254 с тем, чтобы информация, полученная воспринимающими приборами 264, установленными в контейнере 250, при наблюдении с земной поверхности могла быть правильно ориентирована оператором дистанционного управления, например, с привязкой к сетке координат или топографической карте. Например, было бы предпочтительным в состав средств 270 ориентации контейнера ввести электронный угломер, выдающий данные об абсолютной (или относительно) пространственной ориентации поворотной подставки 254 по углу возвышения/понижения (относительно базовой плоскости оси статического визирования 266) и электронный компас, выдающий данные об абсолютной (или относительной) пространственной азимутальной ориентации поворотной подставки 254 (относительно базовой плоскости оси статического визирования 266).
Корпус 252 контейнера имеет также кронштейн 272 фиксации в транспортировочном положении, установленный со стороны, противоположной проницаемой концевой стенке 256 (см. фиг. 4), и используемый для фиксации корпуса 252 контейнера в транспортировочном положении. В состав внешнего, дистанционно управляемого блока воспринимающих приборов 200 также входят первый и второй кронштейны 280, 282 фиксации в транспортировочном положении (см. фиг. 7B), установленные на тороидальном фюзеляже 20. Первый кронштейн 280 служит для взаимодействия с кронштейном 272, для фиксации корпуса 252 контейнера в транспортировочном положении. Второй кронштейн 282 предназначен для фиксации задней опорной стойки 212B в транспортировочном положении.
Внешний, дистанционно управляемый блок воспринимающих приборов 200 в развернутом положении показан на фиг. 2, 5. Перед складыванием блока воспринимающих приборов 200 в транспортировочное положение контейнер 250 поворачивается до совмещения своей оси статического визирования 266 с направлением, соответствующим азимутальному углу 180o в системе отсчета БЛА 10 "CYPHERTM", если это требуется, после чего контейнер 250 воспринимающих приборов наклоняется вниз, в транспортировочное положение, показанное на фиг. 6 (для лучшего восприятия этого шасси 300 на фиг. 6 не показано). Затем из узла соединения привода 228 с линейной характеристикой и задней опорной стойки 212B вручную вынимается быстросъемный палец 236 для расстыковки этих элементов конструкции. Затем, для расстыковки задней опорной стойки 212B и кронштейна 226 платформы из узла соединения этих элементов вручную вынимается быстросъемный палец 232. Вслед за этим задняя опорная стойка 212B поворачивается в шарнирной опоре 218 до контакта со вторым кронштейном 282, фиксирующим заднюю опорную стойку 21B в транспортировочном положении (смотри фиг. 7B). И наконец, контейнер 250 воспринимающих приборов вручную наклоняется назад (опорные стойки 212A поворачиваются при этом относительно соответствующих им шарнирных опор 218) до тех пор, пока кронштейн 272 на корпусе 252 контейнера не упрется в первый кронштейн 280 фиксации корпуса 252 в транспортировочном положении. Сочлененные кронштейны 272 и 280 проштыриваются для фиксации контейнера 250 воспринимающих приборов на БЛА 10. На фиг. 7A и 7B показан блок воспринимающих приборов 200 в транспортировочном состоянии. Для приведения блока воспринимающих приборов 200 в рабочее, развернутое состояние, описанные действия выполняются в обратном порядке.
Типовой вариант складывающегося шасси 300 для БЛА 10 "CYPHERTM" в общем виде показан на фиг. 2, а более подробно - на фиг. 8...10. Конструкция шасси 300 позволяет БЛА 10 взлетать и приземляться на неподготовленных площадках в точках ведения наблюдения в режиме дистанционного управления. Рассматриваемая конструкция шасси 300 расширяет диапазон возможностей БЛА 10, позволяя ему работать с неподготовленных посадочных площадок с различной структурой почвы, а также совершать посадки на пересеченную местность с углами уклона до 30o. Шасси 300 предусматривает также возможность его складывания для обеспечения транспортабельности БЛА 10. Кроме того, в зависимости от характера поставленной задачи наблюдения с земной поверхности, на шасси 300 могут быть установлены дополнительные воспринимающие устройства, принадлежащие к типу устройств, которые наиболее эффективно работают у поверхности посадочной площадки.
Шасси 300 включает в себя несколько ног 302, к каждой из которых прикреплена шарнирная пята 310. В рассматриваемом варианте БЛА имеет три ноги 302, обеспечивающие его устойчивость на земле. Хотя шасси 300 могло бы состоять из более чем трех ног 302, с точки зрения технической возможности складывания ног 302 шасси, а также его общего веса, использование более чем трех ног в конструкции шасси, нерационально.
Каждая нога 302 изготавливается как цельный элемент конструкции, имеющий заданную упругость, т.е. в виде пружинной ноги 302. Такое пружинное исполнение ног 302 шасси сглаживает посадочные перегрузки, действующие на БЛА 10 "CYPHERTM", и, кроме того, за счет разной величины прогиба таких ног 302 в определенной степени автоматически компенсируются неровности земной поверхности неподготовленной посадочной площадки. Для усиления эффекта прогиба ноги 302 при посадке БЛА 10 на пересеченную местность, а также для уменьшения взаимодействия выпущенных ног 302 шасси и прикрепленных к ним шарнирных пят 310 с воздушной струей, создаваемой вращающимся несущим винтом, каждая нога 302 имеет статический прогиб, обращенный к оси БЛА (см фиг. 8). С одной стороны каждая нога 302 крепится разъемным способом с помощью соединительных болтов 304 к соответствующей внутренней силовой конструкции 68 внутри тороидального фюзеляжа 20 (см. фиг. 8). Внутренние силовые конструкции 68 более подробно описаны в патенте США N 5277380 на изобретение под названием "Конструкция тороидального фюзеляжа для беспилотных летательных аппаратов с соосным несущим винтом, вращающимся в кольцевом канале" (см., в частности, фиг. 3, 4b этого документа).
К каждой ноге 302 и внутренней силовой конструкции 68 прикреплен несиловой шарнир 306. Несиловые шарниры 306, которые не нагружены в том случае, когда ноги 302 развернуты в полетное положение (см. фиг. 2), предназначаются для обеспечения складывания ног шасси 300. Длина ног 302, определяемая требуемой высокой расположения оси статического визирования 266 над поверхностью площадки ведения наблюдения, нее позволяет складывать ноги в строго радиальное положение по отношению к фюзеляжу, поэтому ось каждого шарнира 306 отклонена в сторону от радиуса фюзеляжа, за счет чего все ноги 302 умещаются в транспортировочном состоянии внутри контура тороидального фюзеляжа 20, как показано на фиг. 10 (для удобства рассмотрения ног 302 шасси в транспортировочном положении БЛА 10 на фиг. 10 показан без внешнего, дистанционно управляемого блока воспринимающих приборов 200). Для развертывания ног 302 в полетную конфигурацию, изложенная последовательность действий выполняется в обратном порядке.
Перед складыванием ног 302 в транспортировочное положение БЛА 10 "CYPHERTM" приподнимается с помощью, например, лебедки, так, чтобы ноги 302 не касались земли. Для высвобождения верхнего конца каждой ноги 302 вынимаются соединительные болты 304 соответствующей ноги 302. После этого свободный конец каждой ноги поворачивается (направление поворота показано стрелкой 307 на фиг. 8) относительно несилового шарнира 306, в результате чего каждая нога 302 убирается внутрь контура тороидального фюзеляжа 20. Прочность несилового шарнира 306 достаточна для удержания соответствующей ему ноги 302 в транспортировочном состоянии (нога 302 в транспортировочном состоянии обозначена на фиг. 8 символами LFC).
В том случае, когда на шарнирной пяте 310 ноги 302 шасси 300 установлены один или несколько воспринимающих приборов, к соответствующей ноге может быть прикреплен дополнительный жгут 308. Дополнительный жгут обеспечивает электрическое соединение специального и полетного оборудования 30, размещенного во внутреннем отсеке (отсеках) 26 БЛА 10, с каждым воспринимающим прибором, установленным на шарнирной пяте 310. Каждый дополнительный жгут 308 имеет петлеобразный участок 308P, обеспечивающий свободу поворота соответствующей ноги 302 во время ее складывания и развертывания. Применение петлеобразного участка 308P исключает необходимость установки электрических разъемов, используемых для стыковки/расстыковки электрических дополнительных жгутов при развертывании/складывании соответствующих им ног 302.
Шарнирная пята 310 отображена на фиг. 9 и включает в себя опорную плиту 312, рычаг 314, шарнирный узел 316 и амортизирующую пружину 318. Опорные плиты 312 в своей совокупности предназначены для обеспечения устойчивости БЛА 10 "CYPHERTM" на поверхности неподготовленной посадочной площадки в точке ведения наблюдения. Рычаг 314 к ноге 302 крепится жестко, а к опорной плите 312 - с возможностью поворота относительно шарнирного узла 316. Пружина 318 устанавливается между опорной плитой 312 и рычагом 314 и поддерживает опорную плиту 312, позволяя ей поворачиваться при касании неровной земной поверхности в момент посадки БЛА 10 "CYPHERTM" на неподготовленную площадку. На фиг. 9 пружина 318 показана в растянутом состоянии. При взлете БЛА 10 под действием силы упругости пружины 318 опорная плита 312 поворачивается относительно шарнирного узла 316 (в случае, показанном на фиг. 9 - по часовой стрелке).
С опорной плитой 312 и шарнирным узлом 316 соединяется датчик механического типа, например, контактный датчик или концевой выключатель. Датчик функционально сопряжен с инерциальной навигационной системой 32 БЛА 10 "CYPHERTM" для автоматического определения возможности посадки на выбранную неподготовленную площадку. Если установлено, что посадочная площадка непригодна, например уклон местности превышает 30o, посылается управляющий сигнал на вычислитель управления полетом 38, который, в свою очередь, посылает БЛА 10 "CYPHERTM" команду на прекращение отработки программы посадочного снижения и на набор заданной высоты, на которой БЛА будет ожидать следующих команд управления.
Как отмечено выше, на опорной плите 312 шарнирной пяты 310 могут быть установлены один или несколько воспринимающих приборов, в зависимости от требований поставленной задачи наблюдения. Как правило, воспринимающий прибор (приборы) 322, устанавливаемые на опорной плите 312, принадлежат к типу устройств, которые более (или наиболее) эффективно работают вблизи поверхности неподготовленной посадочной площадки в точке наблюдения. Как показано в качестве примера на фиг. 9, воспринимающими приборами 322 могут быть сейсмодатчик 322A, акустический датчик 322B, при этом воспринимающие приборы 322 такого типа особенно эффективны в решении задач геолого-сейсмического наблюдения или контроля зоны безопасности. Поскольку толчки/колебания поверхности в точке наблюдения первоначально воспринимаются шарнирной пятой 310, размещение сейсмического воспринимающего прибора 322A на опорной плите 322 обеспечивает его наиболее эффективное использование. Аналогичное преимущество размещения у земной поверхности относится и к акустическому датчику 322B, так как вблизи земли перемещения воздушных масс оказывают наименьшее влияние на точность воспринимаемой акустической информации. Если в состав специального оборудования входит акустический воспринимающий прибор 322B, то на опорную плиту предпочтительно устанавливается ветровой экран 324, отражающий ветра, дующие у поверхности земли и неблагоприятно влияющие на работу акустического воспринимающего прибора 322B. Управление работой воспринимающих приборов 322 может осуществляться дистанционно, по управляющим сигналам (передаваемым со средств ЦДУ или вырабатываемым прикладной программой выполнения задачи из встроенного программного обеспечения), проходящим по дополнительному жгуту 308. Аналогично, данные, собранные воспринимающими приборами 322, могут передаваться в контейнер 250 воспринимающих приборов и/или в БЛА 10 для хранения в памяти и/или передачи на средства ЦДУ в масштабе реального времени.
Согласно типовой схемы выполнения задач наблюдения с земной поверхности БЛА 10 "CYPHERTM" с внешним, дистанционно управляемым блоком воспринимающих приборов 200 и складывающимся шасси 300 в транспортировочном положении перевозится на стартовую площадку, которая может быть неподготовленной и располагаться по возможности ближе к точке ведения наблюдения, транспортным средством, например тягачом с прицепом (транспортное средство может размещать в себе средства ЦДУ, обеспечивающие работу БЛА). По прибытии на стартовую площадку БЛА 10 подвешивается с помощью лебедки, и шасси 300 переводится из транспортировочного в развернутое положение. После этого БЛА 10 опускается на землю, и внешний, дистанционно управляемый блок воспринимающих приборов 200 переводится из транспортировочного в развернутое положение. После проверки работоспособности систем по команде средств ЦДУ начинается этап взлета (запуск двигателя 54, отрыв и зависание).
БЛА 10 "CYPHERTM" в режиме ручного управления может быть выведен на посадочную площадку, в заданный пункт ведения наблюдения, по передаваемым управляющим сигналам (или в альтернативном варианте - по запрограммированному маршруту полета, записанному в памяти вычислителя управления полетом 38). После достижения БЛА 10 заданной неподготовленной посадочной площадки в пункте наблюдения активизируется программа посадочного снижения, предусматривающая поворот контейнера 250 воспринимающих приборов в положение обзора посадочной площадки через вращающийся несущий винт 100 с целью передачи данных для оценки возможности приземления в данном пункте наблюдения. После приземления БЛА 10 двигатель 54 выключается, и БЛА начинает выполнение задачи наблюдения. Управление работой блока воспринимающих приборов, размещенных в контейнере 250, и/или воспринимающего прибора (приборов) 322 может осуществляться по программе выполнения задачи из встроенного программного обеспечения и/или по управляющим сигналам в масштабе реального времени. Собранные данные могут запоминаться сопряженным оборудованием обработки данных на БЛА 10 и/или передаваться на ЦДУ в масштабе реального времени. БЛА может быть перемещен на вторую, третью и т.д. площадки ведения наблюдения с земной поверхности путем дистанционного запуска двигателя 54 и выполнения программы взлета. После выполнения задачи наблюдения БЛА 10 возвращается на место базирования ЦДУ, где внешний, дистанционно управляемый блок воспринимающих приборов 200 и складывающееся шасси 300 переводятся из развернутого в транспортировочное положение, после чего БЛА 10 готов к погрузке на транспортное средство.
Настоящее изобретение допускает различные технические изменения в рамках изложенного замысла. Так, в зависимости от требований задачи наблюдения с земной поверхности, БЛА 10 "CYPHERTM" может иметь компоновку, включающую в себя дистанционно управляемый извне блок воспринимающих приборов 200 и складывающееся шасси 300 с одним или несколькими воспринимающими приборами 322, установленными на шарнирной пяте 310. В другой компоновке БЛА 10 "CYPHERTM" может иметь дистанционно управляемый извне блок воспринимающих приборов 200 и складывающееся шасси 300 без каких-либо воспринимающих приборов, установленных на шарнирной пяте 310. В следующей компоновке БЛА 10 "CYPHERTM" может иметь только складывающееся шасси 300 с одним или несколькими воспринимающими приборами 322, установленными на шарнирной пяте 310. Поэтому следует учитывать, что настоящее изобретение в рамках совокупности его существенных признаков, указанных в прилагаемой формуле изобретения, технически осуществимо в виде, отличающемся от изложенного выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕНАСТРОЙКОЙ КООРДИНАТ | 1995 |
|
RU2145725C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ РЕГУЛИРОВКИ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 1995 |
|
RU2142567C1 |
| УСТРОЙСТВО И СПОСОБ ЛАЗЕРНОГО СПЕКАНИЯ ПОРОШКА | 1994 |
|
RU2141887C1 |
| УСТРОЙСТВО И СПОСОБ ЛАЗЕРНОГО СПЕКАНИЯ | 1994 |
|
RU2132761C1 |
| ВОЗВРАЩАЕМЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ТРЕХОПОРНЫМ ШАССИ | 2008 |
|
RU2408500C2 |
| УЗЕЛ ПЛАНЕТАРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ | 1995 |
|
RU2145396C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2002 |
|
RU2213024C1 |
| УСТРОЙСТВО И СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА (ВАРИАНТЫ) | 1995 |
|
RU2132288C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ЗА СОСТОЯНИЕМ ИЗДЕЛИЯ ИЗ УДАЛЕННОГО ПУНКТА | 2002 |
|
RU2282940C2 |

Аппарат имеет тороидальный фюзеляж и несущий винт, состоящий из пары коаксиально расположенных винтов противоположного вращения, создающих подъемную силу, обеспечивающую вертикальный взлет и посадку аппарата. В одном варианте аппарат оборудован для ведения наблюдения с земной поверхности внешним, дистанционно управляемым, складывающимся в транспортировочное положение с блоком воспринимающих приборов 250, способным в целях наблюдения с земной поверхности выполнять сканирование в горизонтальной плоскости и в вертикальной плоскости в пределах заданных углов возвышения/понижения, а также складывающимся шасси 300, обеспечивающим возможность посадки на неподготовленные площадки. При этом складывающееся шасси 300 состоит из несколько ног, одним концом прикрепленных к тороидальному фюзеляжу посредством шарниров, сочленяющих каждую ногу с тороидальным фюзеляжем. Применение шарниров позволяет складывать шасси в транспортировочное положение, причем каждая нога шасси вместе с шарнирной пятой убирается внутрь контура тороидального фюзеляжа. Изобретение направлено на решение задачи дистанционного наблюдения. 15 з.п.ф-лы, 11 ил.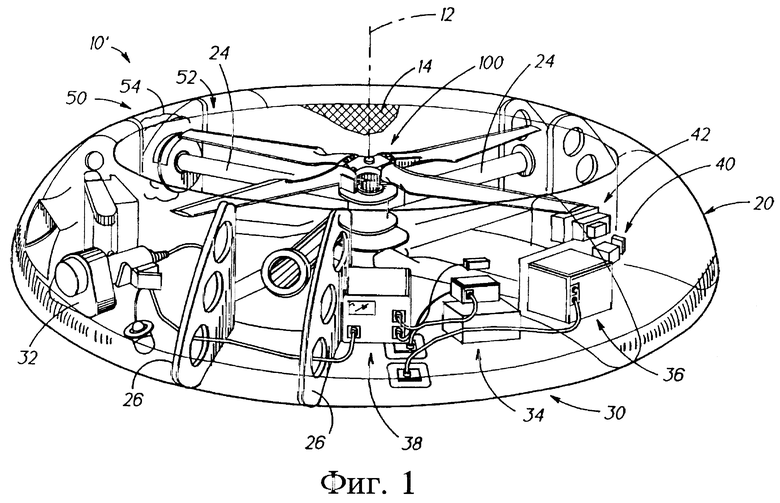
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 0 |
|
SU170432A1 |
