Изобретение относится к управлению дистанционно управляемыми движущимися аппаратами и, в частности, к перенастройке системы координат для управления дистанционно управляемым движущимся аппаратом.
Предшествующий уровень техники
Дистанционно управляемые движущиеся аппараты используются во многих сферах, включая военные, промышленные и развлекательно-игровые применения. Хорошо известно использование в развлекательно-игровых целях моделей самолетов, вертолетов, автомобилей, лодок и судов. Известно промышленное применение дистанционно управляемых движущихся аппаратов, выполняющих трудные и опасные задачи, такие, как проверки, техническое обслуживание и ремонт в зонах сильного радиационного заражения, исследования экстремальных морских глубин и наблюдение с воздуха. В военной области с недавних пор возвращается интерес к беспилотным летательным аппаратам (БЛА), предназначенным для выполнения ряда задач, решение которых силами пилотируемых летательных аппаратов считается неприемлемым по различным причинам. Такими задачами являются воздушное наблюдение, разведка, обнаружение цели и/или ее указание, получение и накопление данных, связь передачи данных, запуск ложных целей, активное радиоэлектронное противодействие, отвлечение противника или полеты с грузом без возврата. Подобной задачей, выполняемой дистанционно управляемыми торпедами в течение длительного периода, является доставка боевого заряда к цели под водой.
Очевидное различие между движущимся аппаратом с экипажем и дистанционно управляемым движущимся аппаратом заключается в управлении или пилотаже движущимся аппаратом. В движущемся аппарате с экипажем на борту оператор сидит внутри его и вырабатывает входные управляющие сигналы в соответствии с желательной реакцией движущегося аппарата. В таком случае все управляющие действия оператора движущегося аппарата основаны на системе координат, связанной с аппаратом. Например, в самолете входные управляющие сигналы подаются летчиком посредством ручки управления. Если летчик желает, чтобы самолет двигался вперед, он вводит ручкой управления управляющий сигнал, который преобразуется в движение самолета по тангажу, направленное вперед. Аналогично, если летчик желает, чтобы самолет двигался вправо, он вводит ручкой управления управляющий сигнал, который преобразуется, в свою очередь, в правый крен самолета.
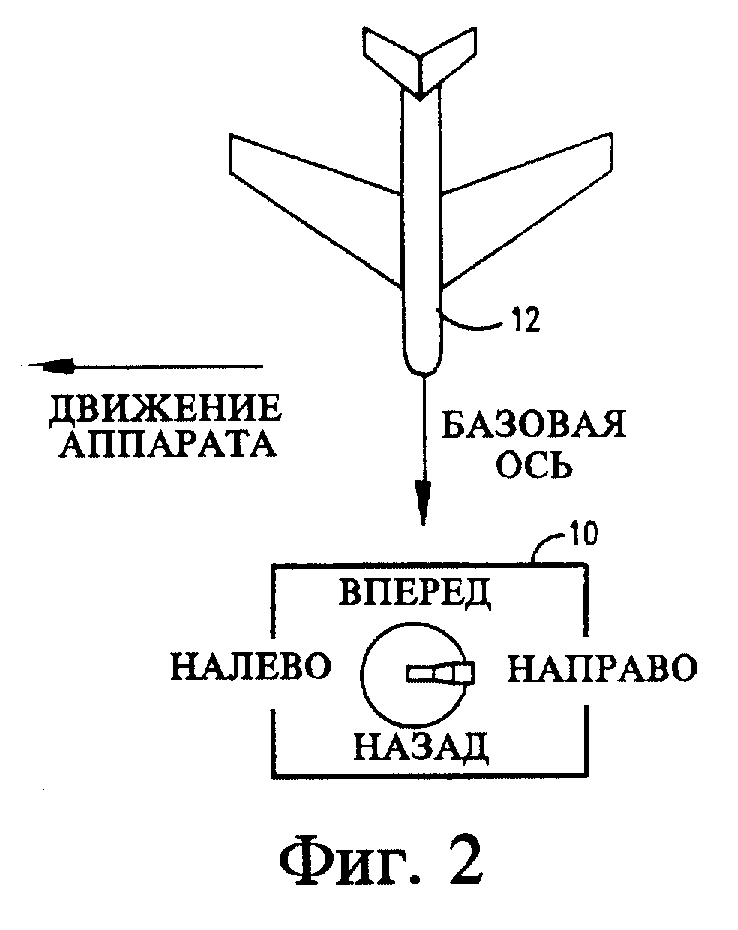
Проблема управления дистанционно управляемыми движущимися аппаратами заключается в том, что если оператор движущегося аппарата управляет им из удаленного положения, то управляющие команды, вырабатываемые в системе координат, связанной с оператором, могут привести к нежелательному движению движущегося аппарата. Как правило, движение дистанционно управляемого движущегося аппарата задается направлением, куда нацелена фиксированная базовая точка или ось движущегося аппарата, например, направлением носовой или фронтальной части движущегося аппарата. На фиг. 1 видно, что если движущийся аппарат 12 и его оператор 10 имеют одинаковую ориентацию вперед или систему координат, входные управляющие сигналы от оператора 10 приведут к соответствующему изменению движения движущегося аппарата, например, если оператор вводит сигнал на движение движущегося аппарата вправо, движущийся аппарат 12 будет двигаться/поворачивать вправо. Однако, как показано на фиг. 2, если движущийся аппарат движется к оператору 10, управляющий сигнал от оператора 10 приведет к противоположному изменению движения движущегося аппарата, например, если оператор вводит сигнал на движение движущегося аппарата вправо, движущийся аппарат будет на самом деле двигаться/поворачивать влево относительно оператора движущегося аппарата.
Из EP-A-0522829 известна система управления и контроля за положением дистанционно управляемого движущегося аппарата. Эта система определяет местоположение аппарата с использованием глобальной системы определения местоположения (ГСОМ) или передающей радиосигналы системы определения местоположения. Из патента США N 4405943 известно рассоединение работы камеры, установленной на дистанционно управляемом движущемся аппарате, и канала передачи данных с камеры для обеспечения подачи изображения высокого разрешения на контроллер дистанционно управляемого движущегося аппарата. Однако ни один из этих документов не затрагивает проблемы управления без предвидения при использовании определенных систем управления дистанционно управляемыми движущимися аппаратами.
Поэтому существующие способы управления дистанционно управляемыми движущимися аппаратами во многом полагаются на квалификацию оператора. После серьезной подготовки оператор может научиться умело управлять дистанционно управляемым движущимся аппаратом, находящимся относительно него во многих пространственных положениях. Однако в условиях стресса, больших нагрузок и отсутствия предвидения управление дистанционно управляемым движущимся аппаратом может привести к непреднамеренному и нежелательному движению последнего.
Сущность изобретения
Целью изобретения является разработка усовершенствованной системы управления для дистанционно управляемого движущегося аппарата, обеспечивающая переменную систему координат для управления.
Предложенная система управления дистанционно управляемым движущимся аппаратом позволяет оператору выбирать базовую ось движущегося аппарата для определения реакции аппарата на управляющее воздействие.
Согласно изобретению, система управления дистанционно управляемым движущимся аппаратом также позволяет оператору выбирать для управления движущимся аппаратом земную систему координат, систему координат, связанную с движущимся аппаратом, или переменную систему координат.
Согласно настоящему изобретению выбирается система координат, и входные управляющие сигналы, вырабатываемые оператором движущегося аппарата, преобразуются с учетом ориентации дистанционно управляемого аппарата в выбранной системе координат так, что дистанционно управляемый движущийся аппарат реагирует на входные управляющие сигналы относительно выбранной системы координат.
Далее в соответствии с изобретением может быть выбрана земная система координат, основанная на фиксированном курсе, например истинном Севере, или основанная на начальной ориентации оператора движущегося аппарата. Можно также выбрать систему координат, привязанную к движущемуся аппарату и являющуюся неподвижной относительно движущегося аппарата и переменной относительно оператора. Можно выбрать систему координат, привязанную к оператору движущегося аппарата, основанную на ориентации оператора относительно Земли, при этом управляющие команды преобразуются, основываясь на изменениях как ориентации оператора относительно земного ориентира, так и ориентации дистанционно управляемого движущегося аппарата относительно этого земного ориентира, что обеспечивает неподвижную относительно оператора и переменную относительно движущегося аппарата систему координат.
Далее в соответствии с настоящим изобретением преобразование величины курса дистанционно управляемого движущегося аппарата может основываться на выбранной передней, фиксированной или переменной базовой точке движущегося аппарата, связанной с центром тяжести движущегося аппарата, его передней частью, местом расположения на нем чувствительного элемента или любым другим произвольным местом на движущемся аппарате.
Изобретение обеспечивает упрощенное управление дистанционно управляемым движущимся аппаратом за счет предоставления оператору возможности выбора системы координат для входных управляющих сигналов, основанных на системе координат, связанной с оператором движущегося аппарата, или фиксированной земной системе координат, в отличие от системы координат, связанной с самим движущимся аппаратом. Использование фиксированной земной системы координат особенно предпочтительно при управлении движением аппарата по его положению на электронной карте, где при этом карта построена в неподвижной земной системе координат. Поэтому изобретение позволяет неопытному оператору управлять дистанционно управляемым движущимся аппаратом без характерной для известных систем управления дезориентации, сопровождающейся потерей предвидения эволюций движущегося аппарата. Кроме того, благодаря тому, что преобразование значения курса дистанционно управляемого движущегося аппарата может основываться на положении чувствительного элемента на аппарате, движущийся аппарат может управляться таким образом, что изменения входных управляющих сигналов будут управлять линией визирования чувствительного элемента.
Рассмотренные выше и другие цели, особенности и преимущества настоящего изобретения более наглядно и полно раскрыты в следующем подробном описании его вариантов, отображенных на прилагаемых рисунках.
Краткое описание чертежей
Фиг. 1 - блок-схема дистанционно управляемого движущегося аппарата и панели управления оператора, показывающая реакцию движущегося аппарата на входные управляющие сигналы, когда аппарат и панель управления находятся в одной системе координат.
Фиг. 2 - блок-схема дистанционно управляемого движущегося аппарата и панели управления оператора, показывающая реакцию движущегося аппарата на входные управляющие сигналы, когда аппарат и панель управления находятся в противоположных системах координат.
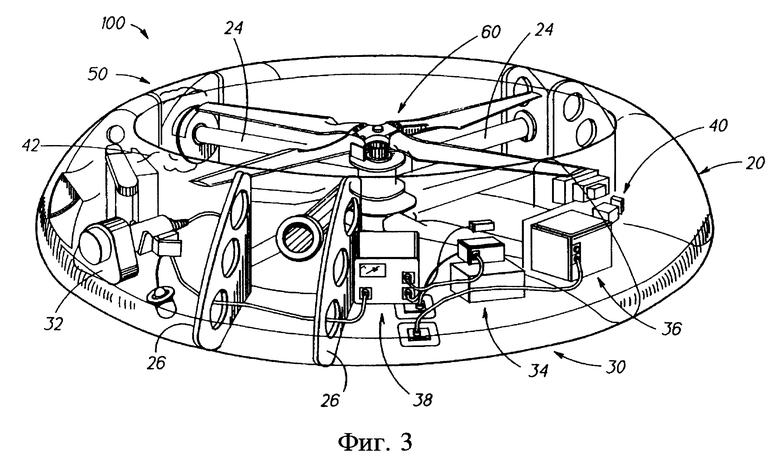
Фиг. 3 - аксонометрическая проекция с частичным вырезом дистанционно управляемого движущегося аппарата, имеющего систему управления с переменной системой координат в соответствии с настоящим изобретением.
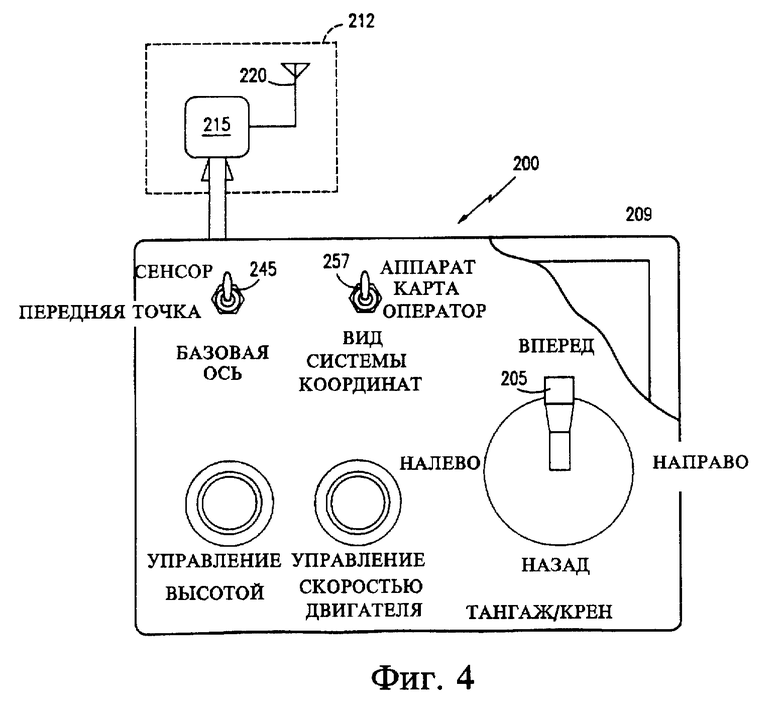
Фиг. 4 - блок-схема с частичным вырезом панели управления оператора, применяемой с дистанционно управляемым движущимся аппаратом по фиг. 3.
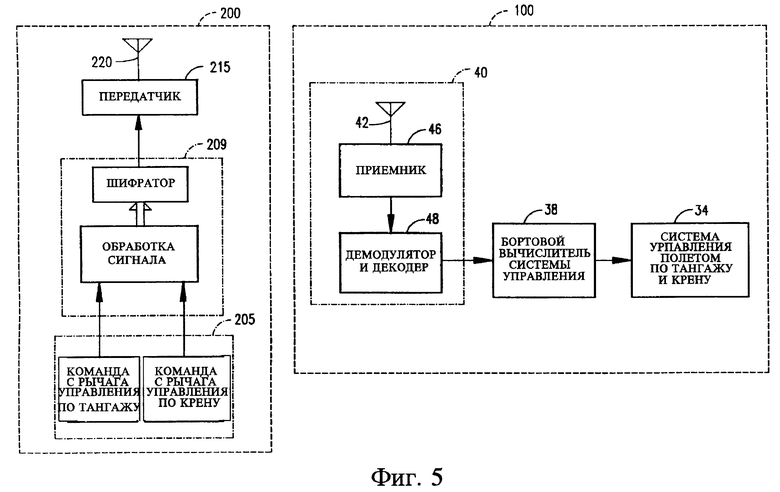
Фиг. 5 - блок-схема, показывающая передачу управляющих сигналов от панели управления оператора, показанной на фиг. 4, до дистанционно управляемого движущегося аппарата, показанного на фиг. 3.
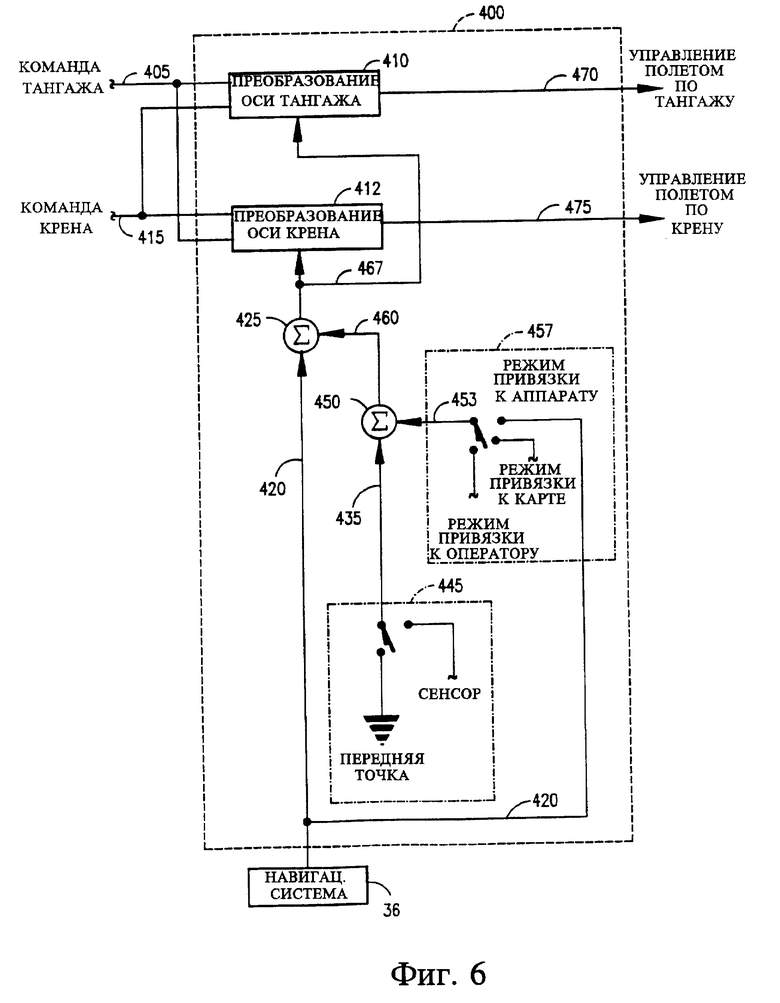
Фиг. 6 - блок-схема, показывающая процесс преобразования команд, используемый в вычислителе управления полетом дистанционно пилотируемого летательного аппарата.
Наилучший способ осуществления изобретения
Перенастраиваемая система управления для дистанционно управляемого движущегося аппарата согласно изобретению хорошо приспособлена для оптимального управления движущимся аппаратом, исходя из удобства работы оператора и эффективности реализации движущимся аппаратом своего предназначения. Система обеспечивает выработку команд управления аппаратом в системе координат, привязанной к оператору, вследствие чего управляющие команды оператора основаны на предвидении характера движения движущегося аппарата и не зависят от его ориентации относительно оператора. Дополнительно система обеспечивает привязку положения движущегося аппарата к его чувствительному элементу, позволяя оператору легко управлять линией визирования чувствительного элемента на движущемся аппарате для улучшенной точности приема данных. Следующее преимущество обеспечения фиксированной системы координат для дистанционно управляемого движущегося аппарата заключается в легкости управления аппаратом, когда его положение индицируется на электронной карте, привязанной к неподвижной земной системе координат.
Настоящее изобретение будет описано на примере беспилотного летательного аппарата (БЛА). Однако специалистам будет понятно, что перенастраиваемую систему управления согласно изобретению можно применять на любом дистанционно управляемом движущемся аппарате при условии, что этот аппарат содержит навигационную систему или другие средства, определяющие изменения в ориентации движущегося аппарата относительно оператора или неподвижной системы координат.
На фиг. 3 показан один вариант БЛА 100. БЛА, используемый в качестве примера, который состоит из тороидального фюзеляжа или оболочки 20 с обтекаемым аэродинамическим профилем, оборудования 30 для выполнения полета/задач, подсистемы 50 силовой установки и узла 60 ротора. Тороидальный фюзеляж 20 оснащен множеством распорок 24, которые прикреплены к узлу 60 ротора и служат для фиксации узла 60 ротора в фиксированном соосном положении с тороидальным фюзеляжем 20. Тороидальный фюзеляж 20 содержит расположенные спереди внутренние отсеки 26, предназначенные, как правило, для размещения различного оборудования 30 для выполнения полета/задач. Оборудование 32 для выполнения задачи преимущественно (но не обязательно) размещается во внутреннем отсеке 26. В общем случае оборудование для выполнения задач состоит из нескольких типов пассивных датчиков, например, инфракрасных датчиков, телевизионных камер и т.д., и/или активных устройств, например лазеров, устройств радиосвязи т.д., а также соответствующей обрабатывающей аппаратуры. Другое оборудование 30 для выполнения полета/задач, такое, как системы 34 радиоэлектронного оборудования, навигационное оборудование 36, бортовой вычислитель 38, блок 40 коммуникаций (для передачи данных от датчиков и получения входных управляющих команд в масштабе реального времени), антенна и т.д., распределено по различным внутренним отсекам 26, как показано на фиг. 3. Распределение различного оборудования 30 для выполнения полета/задач по отсекам оптимизировано с учетом размещения в тороидальном фюзеляже 20 подсистемы 50 силовой установки.
Набор оборудования 30 для выполнения полета/задач, описанного выше, является типовым используемым в БЛА. Однако, как должно быть понятно специалистам, отдельные компьютер управления полетом, системы радиоэлектронного и навигационного оборудования не являются строго необходимыми для выполнения задач, указанных в настоящем изобретении. В другом варианте для выполнения указанных функций можно задействовать единый компьютер системы управления полетом или компьютер выполнения задач.
На фиг. 4 показана панель 200 управления оператора дистанционно управляемого БЛА 100 (фиг. 1). Панель 200 управления снабжена органом управления, которым в рассматриваемом варианте изобретения является рычаг 205 управления (джойстик) для ввода сигналов, управляющих полетом БЛА. Показанный рычаг 205 управления является двухосным: перемещение рычага вперед-назад связано с движением по оси X, а влево-вправо связано с движением по оси Y.
Из динамики полета винтокрылых ЛА известно, что управление перемещением такого ЛА вперед-назад (по координатной оси X) достигается изменением угла тангажа (пикирование - кабрирование), а управление его перемещением влево-вправо (по координатной оси Y) - изменением угла крена в соответствующую сторону. Поэтому далее в качестве управляющих сигналов X и Y рассматриваются сигналы заданных углов тангажа и крена.
Компьютер 209 панели управления установлен для приема команд управления от рычага 205 управления и их преобразования в сигналы, которые должны передаваться посредством оборудования 212 связи. Оборудование 212 связи включает в себя передатчик 215, предназначенный для приема команд управления, генерируемых компьютером 209 панели управления, и их передачи через антенну 220 панели управления.
В соответствии с фиг. 5, когда управляющие сигналы передаются панелью управления через антенну 220, их воспринимает антенна 42 БЛА, через которую эти сигналы поступают в оборудование 40 связи БЛА. Оборудование связи включает в себя приемник 46 и демодулятор/декодер 48, принимающий и декодирующий сигнал, переданный панелью управления. После этого демодулированные и декодированные управляющие сигналы поступают в компьютер 38 системы управления и в радиоэлектронное оборудование 34. Компьютер 38 системы управления и радиоэлектронное оборудование 34 обрабатывают поступающие сигналы управления, формируя тем самым управляющие команды для управляющих поверхностей БЛА на выполнение им желательных маневров.
Все описанные устройства являются обычными для этой области техники. В известной системе управления с системой координат, привязанной к летательному аппарату, фиксированная базовая точка выбирается проходящей через переднюю или головную часть аппарата, и в ответ на управляющие сигналы эта базовая точка совершает маневры. Поэтому, например, если оператор посылает с панели управления команду на выполнение правого поворота или крена, БЛА повернет фиксированную базовую точку вправо относительно системы координат, связанной с БЛА. Однако в зависимости от ориентации БЛА относительно оператора команда на правый поворот, поданная оператором в систему управления БЛА, может быть выполнена как левый поворот с точки зрения оператора, находящегося на курсе движения управляемого им БЛА или находящегося "перед" БЛА.
Перенастраиваемая система управления в соответствии с настоящим изобретением позволяет оператору выбирать различные системы координат для управления БЛА, позволяя тем самым оператору приспособить управление БЛА к специфическим требованиям выполнения им своей задачи, что обеспечивает упрощенное интуитивное управление БЛА.
Согласно фиг. 6, компьютер системы управления снабжен блоком 400 преобразования рычага управления, который позволяет оператору задавать различные системы координат и базовые оси аппарата при управлении дистанционно управляемым летательным аппаратом. Требуемую систему координат или базовую ось можно выбрать путем перестановки переключателя или ввода команды на панели 200 управления (фиг. 2). После этого команда на выбор системы координат или базовой оси передается через оборудование связи и антенну панели управления в бортовой компьютер системы управления через оборудование связи на дистанционно пилотируемом летательном аппарате.
Блок 400 преобразования рычага управления отвечает на управляющие сигналы, принимаемые с панели управления, и данные о курсе летательного аппарата, осуществляя управление летательным аппаратом в соответствии с желательным режимом и ориентиром. Команда управления по тангажу (посылаемая с панели управления через оборудование связи летательного аппарата) поступает по каналу 405 на средство преобразования управляющих сигналов, включающее в рассматриваемом варианте изобретения блок 410 преобразования осей тангажа и блок 412 преобразования осей крена. Аналогично команда управления по крену поступает на блоки 410 и 412 преобразования осей тангажа и крена по каналу 415. Другим входным сигналом для блоков преобразования 410 и 412 осей тангажа и крена является угол ориентации базовой оси движущегося аппарата, или угол преобразования (θ). Угол преобразования формируется на основе истинного курса летательного аппарата, выдаваемого навигационной системой 36, желаемой базовой оси летательного аппарата и вида системы координат.
Истинный курс летательного аппарата выдается навигационным оборудованием 36 летательного аппарата, например, кольцевым лазерным гироскопом или инерциальной навигационной системой. Сигнал истинного курса показывает ориентацию фиксированной базовой оси летательного аппарата относительно истинного Севера. Обычно за базовую ось принимают ось, проходящую через переднюю часть аппарата, определяемую конструктивно или другим способом, таким, как вычисление на основе местоположения центра тяжести. Поскольку аппарат с тороидальным фюзеляжем имеет улучшенные летные характеристики прямолинейного полета, для тороидальной конфигурации расположение базовой оси определяют на основе положения центра тяжести. Сигнал истинного курса, формируемый навигационной системой 36, проходит по каналу 420 в суммирующий блок 425, вырабатывающий сигналы угла преобразования - угловой ориентации базовой оси дистанционно управляемого движущегося аппарата. Другим входным сигналом для суммирующего блока 425 является сигнал курса базовой оси, поступающий по каналу 460 с выхода суммирующего блока 450.
Одним из входных сигналов для суммирующего блока 450 является сигнал выбранной базовой оси летательного аппарата, поступающий по каналу 435 из переключателя 445 базовых осей летательного аппарата. Действие переключателя 445 базовых осей зависит от положения переключателя 245 базовых осей, расположенном на панели 200 управления (фиг. 4). Если переключатель 245 базовых осей на панели управления находится в положении "спереди", базовая ось летательного аппарата, используемая для управления его полетом, проходит через переднюю часть летательного аппарата. Однако, если переключатель 245 базовых осей на панели управления находится в положении "чувствительный элемент", то управление летательным аппаратом будет осуществляться по базовой оси, проходящей через чувствительный элемент. Поэтому сигнал, проходящий по каналу 435, будет равен угловому расстоянию между базовой осью, проходящей через переднюю часть летательного аппарата и базовой осью, проходящей через чувствительный элемент. Это угловое расстояние между базовой осью, проходящей через переднюю часть летательного аппарата и базовой осью, проходящей через чувствительный элемент, характеризуется углом смещения (φ). Другим входным сигналом для суммирующего блока 450 является сигнал вида системы координат, поступающий по каналу 453 от средства переключения системы управления на различные системы координат, которое в рассматриваемом варианте изобретения представлено переключателями 457 и 257 систем координат. Действие переключателя 457 систем координат зависит от положения переключателя 257 систем координат на панели управления 200 (фиг. 4). В режиме использования системы координат, связанной с летательным аппаратом, базовая ось летательного аппарата используется для управления его полетом с помощью панели управления. В режиме использования системы координат, привязанной к электронной карте, для управления летательным аппаратом используется земной ориентир, например Север. В режиме использования системы координат, привязанной к оператору, в качестве базовой оси используется ориентация оператора сразу после активизации данного режима. На выходе суммирующего блока 450 формируется сигнал курса базовой оси и поступает по каналу 460 в суммирующий блок 425. Выходным сигналом суммирующего блока 425 является угол преобразования, который поступает по каналу 467 на блоки 410 и 412 преобразования осей тангажа и крена.
Преобразование 410 оси тангажа использует уравнение (1) для формирования преобразованного управляющего сигнала по тангажу (ПСТ), который предназначается для подачи по каналу 470 в систему управления полетом по тангажу:
Подобным образом преобразование 412 оси крена использует уравнение (2) для формирования преобразованного управляющего сигнала по крену (ПСК), который предназначается для подачи по каналу 475 в систему управления полетом по крену:
Принцип работы изобретения наилучшим образом демонстрируется на примере. Когда летательный аппарат управляется в нормальном режиме, при котором его базовой осью служит ось, проходящая через переднюю точку, и в системе координат, привязанной к летательному аппарату, функция преобразования не должна вносить какие-либо поправки в команду 405 тангажа и команду 415 крена, проходящие по каналам 470 и 475, т.е. в этом случае ПСТ = команда тангажа, а ПСК = команда крена. Сигнал курса летательного аппарата поступает по каналу 420 в суммирующий блок 425. Сигнал углового положения базовой оси летательного аппарата, который равен нулю, поступает по каналу 435 в суммирующий блок 450. На выходе суммирующего блока 450 формируется сигнал курса летательного аппарата, поступающий по каналу 460 в суммирующий блок 425, где этот сигнал вычитается из сигнала курса летательного аппарата, поступающего по каналу 420. Таким образом выходным сигналом суммирующего блока 425, поступающим в канал 467, является ноль, и согласно уравнениям (1) и (2) при нулевом угле преобразования ПСТ, проходящий по каналу 470, равен команде тангажа, проходящей по каналу 405, а ПСК, проходящий по каналу 475, равен команде крена, проходящей по каналу 415.
Когда летательный аппарат управляется по базовой оси, проходящей через чувствительный элемент в системе координат, привязанной к летательному аппарату, входные управляющие сигналы, посылаемые оператором, приведут к изменению положения чувствительного элемента относительно системы координат, привязанной к летательному аппарату. В этом случае переключатель 445 на фиг. 6 будет установлен в положение "чувствительный элемент", и сигнал, отображающий угловое расстояние между базовой осью, проходящей через чувствительный элемент и базовой осью, проходящей через переднюю точку летательного аппарата, подается по каналу 435 в суммирующий блок 450, а другим сигналом, поступающим на вход суммирующего блока 450 по каналу 453, является сигнал курса летательного аппарата. Поэтому угол преобразования, поступающий в канал 467, характеризует относительное угловое положение базовой оси, проходящей через чувствительный элемент. Таким образом, ПСТ и ПСК будут преобразованы в блоках 410, 412 преобразования на величину поправки, соответствующую угловому расстоянию между базовой осью, проходящей через чувствительный элемент и базовой осью, проходящей через переднюю точку летательного аппарата.
Режим применения системы координат, привязанной к карте, особенно удобен при управлении летательным аппаратом с помощью электронной карты с фиксированной системой координат, ориентированной, например, на Север. В этом случае как панель управления оператора, так и летательный аппарат функционируют в фиксированной системе координат. При использовании оси, проходящей через переднюю точку, в качестве базовой оси летательного аппарата в режиме применения системы координат, привязанной к карте, на выходе суммирующего блока 450 будет сигнал, отображающий ориентацию аппарата относительно выбранного направления системы координат, например, направления на Север. Поэтому угол преобразования, формируемый на выходе суммирующего блока 425, будет пропорционален разности курса летательного аппарата и базового направления системы координат, привязанной к карте. В уравнениях (1) и (2) команда тангажа и команда крена преобразуются на величину разности курса летательного аппарата и базового направления системы координат, привязанной к карте. Если система координат, привязанная к карте, применяется в сочетании с выбором базовой оси летательного аппарата, проходящей через чувствительный элемент, то угловое расстояние между этой базовой осью, проходящей через чувствительный элемент и базовой осью, проходящей через переднюю точку летательного аппарата, прибавляется в суммирующем блоке 450 к угловой ориентации последней в системе координат, привязанной к карте. Таким образом, преобразования 410 и 412 учитывают также различие относительных угловых положений базовых осей, проходящих через чувствительный элемент, и переднюю точку летательного аппарата при преобразовании команды тангажа и команды крена.
Работа системы координат, привязанной к оператору (фиг. 6), в основном идентична работе системы координат, привязанной к карте (фиг. 6), за исключением того, что направление ее базовой оси соответствует ориентации панели управления оператора после включения режима системы координат, привязанной к оператору. Таким образом, если оператор после включения этого режима обращен лицом к Северу, по каналу 453 проходит сигнал базовой оси системы координат, направленной на Север.
Проблема, связанная с фиксированной системой координат, привязанной к оператору, во время работы соответствующего режима, заключается в том, что если оператор в процессе дистанционного управления летательным аппаратом меняет свое положение, фиксированная система координат больше не обеспечивает преимущества интуитивного управления по крену и тангажу. Для устранения этого недостатка может быть применен режим переменной системы координат, связанной с оператором, в котором привязанная к оператору система координат изменяется в соответствии с изменениями ориентации панели управления оператора. Это можно осуществить путем установки панели управления оператора на подставку и формирования сигнала от следящей системы или гироскопа, отражающего изменения положения панели управления относительно начальной системы координат, привязанной к оператору. В другом варианте панель управления оператора может быть оборудована точным индикатором положения, таким, как кольцевой лазерный гироскоп или инерциальный датчик положения, в результате чего при изменении положения панели управления изменится положение привязанной к оператору системы координат.
В силу сложности систем управления, применяемых на летательных аппаратах, настоящее изобретение было описано на примере беспилотного летательного аппарата. Однако специалисту ясно, что перенастраиваемая система управления согласно изобретению применима в любом движущемся аппарате при условии, что он оснащен средствами определения ориентации движущегося аппарата относительно выбранной системы координат. Движущийся аппарат может иметь бортовую навигационную систему либо для измерения ориентации движущегося аппарата относительно базовой оси системы координат можно использовать внешние устройства.
Изобретение относится к области управления дистанционно управляемыми летательными аппаратами. Технический результат изобретения - повышение эффективности управления. Выбирается система координат и входные управляющие сигналы, вырабатываемые оператором движущегося аппарата, преобразуются с учетом ориентации дистанционно управляемого аппарата в выбранной системе координат так, что дистанционно управляемый движущийся аппарат реагирует на входные управляющие сигналы относительно выбранной системы координат. Может быть выбрана земная система координат, основанная на фиксированном курсе, например истинном Севере, или основанная на начальной ориентации оператора движущегося аппарата. Можно также выбрать систему координат, привязанную к движущемуся аппарату и являющуюся неподвижной относительно движущегося аппарата и переменной относительно оператора. Можно выбрать систему координат, привязанную к оператору движущегося аппарата, основанную на ориентации оператора относительно Земли, при этом управляющие команды преобразуются, основываясь на изменениях как ориентации оператора относительно земного ориентира, так и ориентации дистанционно управляемого движущегося аппарата относительно этого земного ориентира, что обеспечивает неподвижную относительно оператора и переменную относительно движущегося аппарата систему координат. 6 з.п. ф-лы, 6 ил.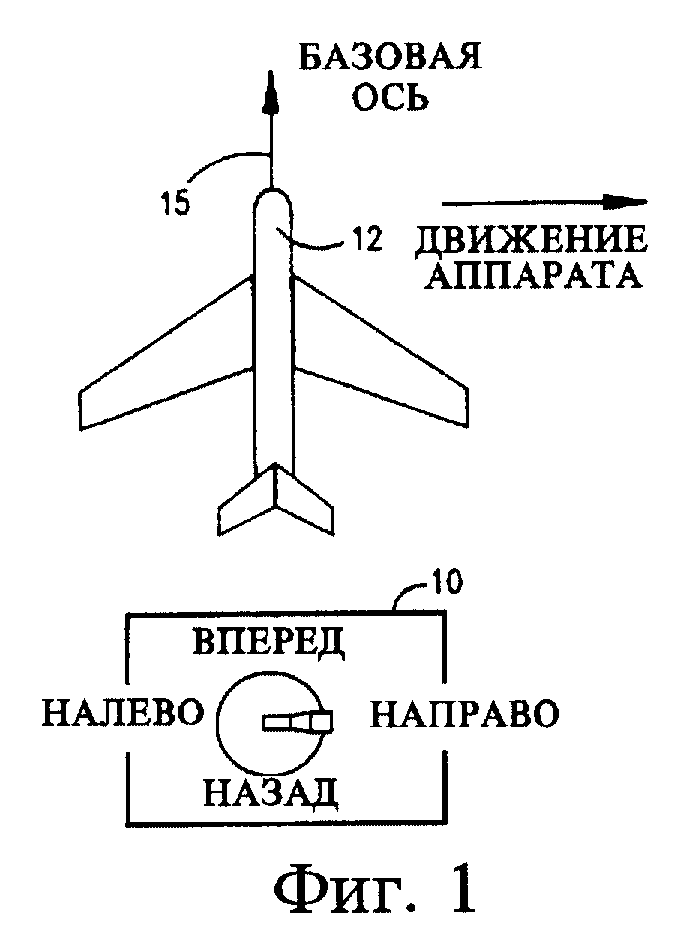
5. Система управления по п.2, отличающаяся тем, что сигнал относительного углового положения выбранной базовой оси отображает угол (⊘) смещения, характеризующий угловое расстояние между указанной выбранной базовой осью и фиксированной базовой осью дистанционно управляемого движущегося аппарата.
| Лентопротяжный механизм | 1970 |
|
SU522829A3 |
| US 4405943 A, 20.09.83 | |||
| Максимов М.В., Горгонов Г.И | |||
| Радиоуправление ракетами | |||
| - М.: Сов | |||
| радио, 1964, с.518 - 521, рис.10.4 | |||
| Доброленский Ю.П | |||
| и др | |||
| Автоматика управляемых снарядов | |||
| - М.: Оборониздат, 1963, с.221 - 222. | |||
