(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРСВ
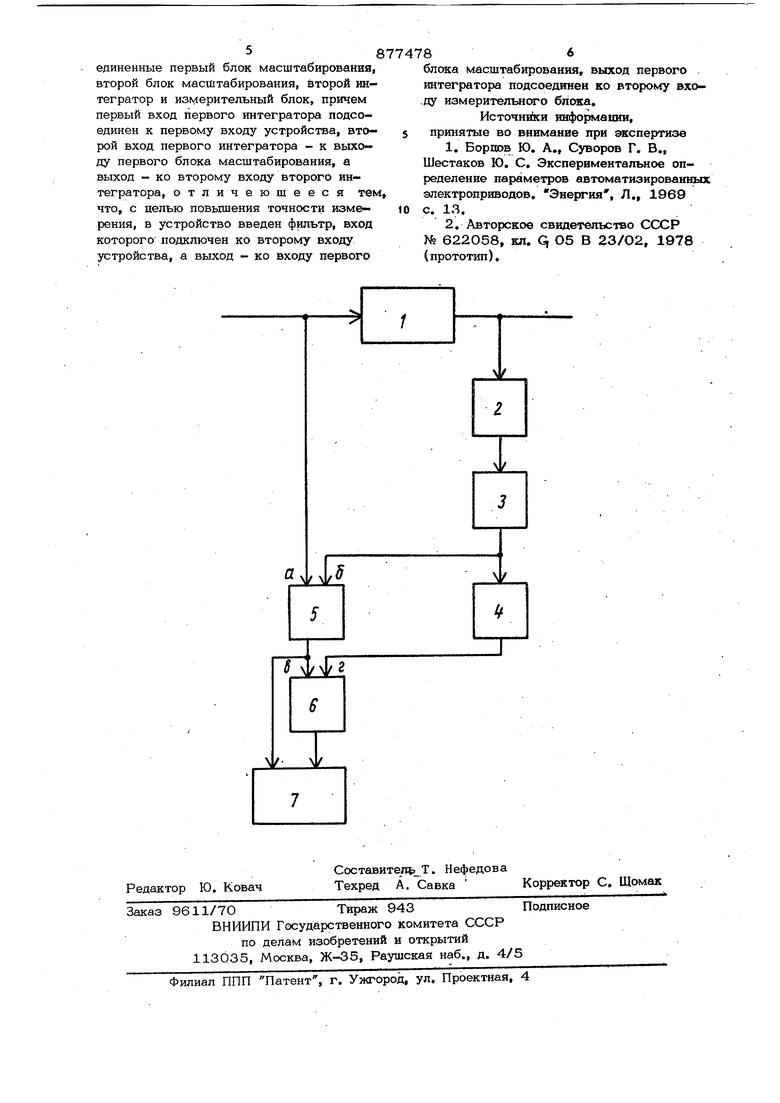
ИНЕРЦИОННЫХ ЗВЕНЬЕВ СИСТЕМ АВТОМАТИЧЕСКОГО Изобретение относится к автоматическому регулированию и может быть использовано при исследованиях и наладке систем автоматического регулирования. Известно устройство для измерения параметров инерционных звеньев автоматического регулирования, содержащее интегратор, входы которого связаны со вхо дами устройства, а выход - с измерител ным прибором Cl3 Наиболее близким к предлагаемому по технической сущности является устройство для измерения параметров инерционных звеньев систем регулирования, содержащее первичный интегратор, после довательно соединенные первый блок мас штабирования, второй блок масштабирования, второй интегратор и измерител1 ный блок, причем первый вход первого интегратора подсоединен к первому входу устройства, второй вход первого интегратора - к выходу первого блока масРЕГУЛИРОВАНИЯштабирования, а выход - ко второму входу второго интегратора Г23 . Недостаток известных устройств состоит в том, что при наличии помех на выходе исследуемого звена увеличиваеть ся погрешность измерений. Цель изобретения - увеличение точности измерения. Поставленная цель достигается тем, что в ycтpoйdтвo введен фильтр, вход которого подключен ко второму входу устройства, а выход - ко входу первого блока масштабирования, выход первого интегратора подсоединен ко второму входу из мерительного блока. На чертеже изображена блок - схема предлагаемого устройства. Устройство содержит инерииойное звено 1, фильтр 2, блоки 3 и 4 масштабирования, интеграторы 5 и 6 и измерительный блок 7. Устройство работает следующим образом. 3 Сигнал, снимаемый со входа инерш он нсхго звена 1, подается на первый вход интегратора 5 (вход а), а на второй вход (5) с противоположным знаком подается сигнал с выхода блока 3 масштабирования, подключенного на выход иссле дуемого звена через фильтр низких частот, в качестве которого могут быть использованы инершонные звенья. Выход блока 3 масштабирования через второй блок 4 масштабирования подключен к одному из входов интегратора б (1). На второй вход интегратора 6 (вход 6) с противоположным Знаком подается сигнал с выхода интегратора 5, Измерительный блок 7 регистрирует выходные сигналы интеграторов 5 и 6. Процесс измерения состоит кз двух операций; установки коэффишентоб передачи интеграторов 5 и 6. и усиления блоков 3 и 4 масштабирования, и непосредс венного измерения параметров звена. Установка коэффициентов осуществляется следующим образом. В установившемся режиме, изменяя коэффициент передачи интегратора 5 по входу cf., добиваются максимального на. пряжения на его выходе (в режиме установки коэффициентов интеграторы 5 и 6 работают в масштабном режиме). Затем, изменяя коэффициент усиления бло ка 3 масштабирования, устанавливают нулевой уровень на выходе интегратора 5. После чего, переведя интегратор 5 в режим интегрирования и возвратив схему в исходное состояние, необходимо пода на вход исследуемого звена 1 скачкообразный сигнал и в установившемся режиме, изменяя коэффициент передачи интегратора 6 по входу , устанавливают максимальное напряжение на его выходе. Затем, меняя коэффициент усиления блока 4 масштабирования, добиваются нулевого уровня сигнала на выходе интегратора 6. После этих операций устройство откалибровано и, переведя интегратор 6 в режим интегрирования можно приступать к определению параметров исследуемого звена. Для этого необходимо, подавая скачкообразный сигнал на вход звена 1, с помощью измерительного блока 7 прои водить определение коэффициентов харак- -теристического .уравнения на выходе интеграторов 5 и 6. Предлагаемое устройство дает возмож ность за счет введения фильтр а повысить точность определения параметров исследуемого звена при наличии помех на его 8 выходе. Уровень помехи при использовании в качестве фильтра апериодического звена первого порядка ослабляется на 20 дБ/дек. Используя правила структурных преобразований и учитывая, что исследуемое звено имеет передаточную функцию М (.р) Зв с pl4c(p+-i а передаточная функция фильтра, например, МОЖНО показать Справедливость изложенного. Изображение по Лапласу на выходе фильтра 2 имеет вид . ВХ (РГ; где Ь(2 вС 2 -|-сц.с|( 4-ctQ.cto, а на выходах интеграторов 5 и 6 соответственно(p; ЦрНь,р.Ь,р.(РК-са; Испопьзуя теорему операционного исчисленияХ( р.Х(Р) , Р -О гдеХ(р;- изображение оригинала X(t), получим значения параметров )-Ц , XQ(cc.)b2. Учитьтая, что постоянная времени ильтрат (известна из выражений (1), егко вычислить параметры исследуемого вена 1. Использование фильтра, описываемого ифференциальным .уравнением более выокого порядка, влечет за собой изменение ыражений (1) и (2) без изменения струк- . уры устройства. .Формул, а изобр етения Устройство для измерения параметров нерционных звеньев систем автоматиеского регулирования, содержащее перичный интегратор, последовательно со-
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1976 |
|
SU622058A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1980 |
|
SU949637A2 |
| Устройство для измерения параметров динамических звеньев систем управления | 1977 |
|
SU732823A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1280579A1 |
| Устройство для измерения параметров линейных динамических объектов | 1979 |
|
SU864251A1 |
| Устройство для измерения параметров динамических звеньев систем регулирования | 1978 |
|
SU930267A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1981 |
|
SU1016773A1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1986 |
|
SU1335940A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1987 |
|
SU1418659A1 |
