Изобретение относится к области измерительной техники и может быть использовано в магниторазведке для поиска полезных ископаемых, в области космических исследований для измерения магнитного поля околоземного пространства и магнитного поля планет, в магнитной навигации для определения местоположения судна и т.д.
Известен способ определения коэффициентов Пуассона подвижного объекта [1, с. 44-58]. Способ заключается в измерении модуля вектора магнитной индукции с помощью модульного датчика, в частности квантового датчика при периодических поперечных кренах подвижного объекта на четырех основных магнитных курсах, соответственно равных 0o, 90o, 180o, 270o, затем измерении модуля вектора магнитной индукции при периодических продольных кренах подвижного объекта на упомянутых четырех основных курсах и по измеренным параметрам магнитного поля на основных четырех курсах объекта при прохождении его над ориентиром, известному наклонению и модулю вектора магнитной индукции геомагнитного поля в районе перемещения объекта определяют из девяти коэффициентов Пуассона, которые можно представить в виде тензора магнитных масс мягкого железа [2, с. 25-30].

две разности (a-k), (e-k), три суммы (b+d), (c+q), (f+h), а также составляющие постоянного магнитного поля подвижного объекта, при этом магнитный курс, поперечные и продольные углы кренов определяют соответственно от магнитного компаса и гировертикали, значение модуля вектора магнитной индукции геомагнитного поля определяют, например, по показаниям аэромагнитометра, а наклонение - по магнитным картам [1, с. 54, абз. 1, с. 56, абз.4].
Известное техническое решение обеспечивает только определение двух разностей и трех сумм коэффициентов Пуассона. В известном техническом решении попарное определение коэффициентов Пуассона (a-k), (e-k), (b+d), (c+q), (f+h) осуществляется при малых кранах объекта, равных примерно 10o, принимая при этом косинусы таких углов равными единице, а синусы этих углов равными соответствующим углам, выраженным в радианах, что снижает точность определения попарных значений коэффициентов Пуассона. В известном способе все расчетные формулы для определения коэффициентов Пуассона выведены в предположении, что движение реального объекта, в частности самолета, судна осуществляется строго по четырем курсам 0o, 90o, 180o, 270o с периодическими кренами одного вида (поперечные, а затем продольные) и одинаковой амплитудой, при которых должны осуществляться измерения магнитной индукции. Все это требует большого количества измерений магнитной индукции с поддержанием во времени постоянных частоты и амплитуды колебаний объекта, что практически, например, для судна или самолета трудно реализовать. Кроме того, большой объем измерений на разных курсах объекта приводит к существенным затратам времени не только на их осуществление, но и на обработку этих измерений.
Известен способ определения коэффициентов Пуассона подвижного объекта в точке пространства, жестко связанной с системой координат объекта [3], который по совокупности существенных признаков наиболее близок к предлагаемому и принят за прототип. Известный способ заключается в измерении в выбранном месте пространства модуля вектора магнитной индукции при отсутствии подвижного объекта, размещении подвижного объекта в упомянутом месте пространства, в изменении по крайней мере двух из трех углов курса, крена, тангажа объекта, измерении этих углов в процессе их изменения и определении по измеренным углам направляющих косинусов каждой оси системы координат объекта в опорной системе координат, измерении проекций векторов магнитной индукции синхронно с измерениями углов курса, крена и тангажа, выборе проекций десяти векторов магнитной индукции, при которых направляющие косинусы осей системы координат различны при каждом измерении упомянутых проекций, и определении коэффициентов Пуассона по измеренным модулю вектора магнитной индукции при отсутствии объекта и проекциям десяти векторов магнитной индукции, заданных в виде функций направляющих косинусов измеренных углов курса, крена, тангажа и неизвестных параметров, которыми являются проекции магнитной индукции на оси опорной системы координат при отсутствии объекта, проекции постоянного магнитного поля объекта и коэффициенты Пуассона объекта.
Для реализации известного способа необходимо изменить и измерить по крайней мере по десять значений двух из трех углов курса, крена, тангажа так, чтобы каждый последующий измеренный угол соответствующего типа отличался от предыдущих. Кроме того, для реализации известного способа следует измерить синхронно с измерением углов курса, крена, тангажа объекта по десять проекций векторов магнитной индукции на каждую ось системы координат объекта, а также модуль вектора магнитной индукции при отсутствии объекта. Следовательно, для определения коэффициентов Пуассона известным способом требуется изменить и измерить от двадцати до тридцати значений углов, например десять значений углов курса и десять значений углов крена или по десять значений каждого из углов курса, крена, тангажа, а также синхронно с измерением этих углов измерить тридцать значений проекций векторов магнитной индукции на оси опорной системы координат. Для определения произведений коэффициентов Пуассона на проекции вектора магнитной индукции геомагнитного поля решается три системы уравнений, каждая из которых состоит из десяти уравнений. Определение коэффициентов Пуассона осуществляется путем решения девяти уравнений, каждое из которых можно представить в виде функции произведения соответствующего коэффициента Пуассона на модуль вектора магнитной индукции при отсутствии объекта.
Таким образом, известный способ связан с большим количеством изменений и измерений углов курса, крена, тангажа объекта, измерений проекций векторов магнитной индукции с подвижного объекта, а также с существенным объемом памяти вычислительного устройства и временем обработки результатов измеренных параметров.
Задачей предлагаемого изобретения является разработка способа определения всех девяти коэффициентов Пуассона по существенно меньшим в отличие от прототипа изменениям и измерениям углов курса, крена, тангажа объекта и измерениям только для этих углов проекций векторов магнитной индукции. Поставленная задача определения коэффициентов Пуассона подвижного объекта, жестко связанного с системой координат объекта, решается за счет измерения проекций вектора магнитной индукции на оси опорной системы координат в выбранном месте пространства при отсутствии объекта, измерении проекций векторов магнитной индукции на объекте, размещенном в выбранном месте пространства при трех значениях одного из углов курса, крена или тангажа и двух других углах, равных нулю, а затем измерении проекций вектора магнитной индукции на объекте при изменении по крайней мере одного из двух углов, равных нулю в предыдущих измерениях.
Предлагаемый способ определения коэффициентов Пуассона подвижного объекта в точке пространства, жестко связанной с системой координат объекта, заключается в измерении магнитной индукции в выбранном месте пространства при отсутствии подвижного объекта, размещении подвижного объекта в упомянутом месте пространства, изменении углов курса, крена, тангажа объекта относительно опорной системы координат, синхронном измерении эти углов и проекций векторов магнитной индукции на объекте на оси системы координат объекта и вычислении коэффициентов Пуассона, используя измеренные значения проекций векторов магнитной индукции на объекте и магнитной индукции при отсутствии объекта, измерении при отсутствии объекта проекций вектора магнитной индукции на оси опорной системы координат, измерении проекций векторов магнитной индукции на объекте при трех различных друг от друга значениях одного из углов курса, крена, тангажа объекта, но при двух других углах, равных нулю, изменении по крайней мере одного из двух упомянутых углов, равных нулю, измерении этих углов и соответствующих им проекций векторов магнитной индукции на объекте, а затем определении коэффициентов Пуассона по измеренным проекциям векторов магнитной индукции на объекте, заданных в виде функций измеренных углов курса, крена и тангажа, измеренных проекций вектора магнитной индукции на оси опорной системы координат при отсутствии объекта и неизвестных проекций вектора магнитной индукции постоянного магнитного поля объекта и коэффициентов Пуассона.
Изменение в предлагаемом изобретении по крайней мере одного из трех углов курса, крена, тангажа объекта приводит к изменению проекций вектора магнитной индукции внешнего поля, например магнитного поля Земли (МПЗ), и изменению проекций вектора магнитной индукции объекта на оси координат объекта в зависимости от изменения каждого из упомянутых углов относительно опорной системы координат, при этом индуктивное поле объекта является функцией коэффициентов Пуассона объекта и вектора внешнего магнитного поля, в частности МПЗ. Проекции вектора магнитной индукции МПЗ в выбранном месте пространства на оси опорной системы координат измеряют при отсутствии объекта. При синхронном измерении проекций трех векторов магнитной индукции с измерением изменяющегося одного из углов курса, крена, тангажа объекта, но при двух других углах объекта, равных нулю, получают по три значения каждой проекции вектора магнитной индукции на оси системы координат объекта. Затем изменяют по крайней мере один из двух упомянутых углов, равных нулю, измеряют эти углы и соответствующие им проекции вектора магнитной индукции на объекте, получая по одному значению каждой проекции вектора магнитной индукции на оси системы координат объекта. Значение каждой из измеренных проекций векторов магнитной индукции можно задать аналитически в виде функций измеренных углов курса, крена, тангажа объекта, измеренных проекций вектора магнитной индукции (МПЗ) на оси опорной системы координат при отсутствии объекта и неизвестных проекций вектора магнитной индукции постоянного магнитного поля объекта и коэффициентов Пуассона объекта. Получим тем самым для упомянутых значений проекций на одну и ту же координатную ось объекта систему четырех уравнений с четырьмя неизвестными. Общим решением для трех систем уравнений (каждая система из четырех уравнений) проекций векторов магнитной индукции на три координатные оси объекта являются девять коэффициентов Пуассона объекта и три проекции вектора магнитной индукции постоянного магнитного поля объекта.
Таким образом, технический результат предлагаемого способа выражается в существенном уменьшении количества изменений и измерений углов курса, крена, тангажа объекта, количества измерений проекций векторов магнитной индукции, упрощении алгоритма определения коэффициентов Пуассона объекта, а значит, и уменьшении времени обработки результатов измерений.
Сущность предлагаемого способа поясняется следующими графическими материалами.
На фиг. 1 изображена структурная схема устройства для осуществления способа определения коэффициентов Пуассона подвижного объекта.
Устройство, реализующее способ определения коэффициентов Пуассона подвижного объекта, состоит (фиг. 1) из трехкомпонентного магниточувствительного датчика 1, трех усилительно-преобразовательных блоков 2-4, первые входы которых подключены к выходам датчика 1, генератора переменной ЭДС 5, первый выход которого подключен к входу датчика 1, а второй выход - к вторым входам блоков 2-4, регистрирующего блока 6, первые три входа которого подключены к соответствующим выходам блоков 2-4, углоизмерительного устройства 7, три выхода которого подключены соответственно к четвертому, пятому и шестому входам блока 6, и устройства обработки информации 8, подключенного к выходу блока 6. При этом датчик 1, блоки 2-4, генератор 5, блок 6, устройство 7 и устройство 8 размещены на подвижном объекте 9.
Заявляемый способ реализуется посредством предлагаемого устройства следующим образом.
На первый вход трехкомпонентного датчика 1 (фиг. 1), в частности феррозонда, подается с генератора 5 переменная ЭДС, возбуждающая этот датчик. В результате этого на выходе датчика 1 появляются три ЭДС второй гармоники, каждая из которых пропорциональна проекции вектора магнитной индукции на соответствующую магнитную ось датчика 1 [4, с. 66]. Выходные сигналы с датчика 1 усиливаются и детектируются в соответствующих блоках 2-4. Для детектирования сигналов на вторые входы блоков 2-4 подается переменное напряжение с генератора 5. На входы блока 6 поступают сигналы с выходов блоков 2-4, пропорциональные проекциям векторов магнитной индукции, и выходные сигналы с устройства 7, пропорциональные углам курса, крена, тангажа объекта 9. Блок 6 обеспечивает синхронную регистрацию сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта 9, и передачу их на устройство обработки информации 8, при введении в которое данных о проекциях вектора магнитной индукции магнитного поля при отсутствии объекта 9 осуществляется определение коэффициентов Пуассона и проекций вектора магнитной индукции постоянного магнитного поля объекта 9. При синхронном измерении проекций трех векторов магнитной индукции и одного из углов курса ϕ, крена θ , тангажа ψ объекта 9, например угла курса ϕ, при двух других углах θ и ψ, равных нулю, получают по три следующих значения проекций векторов магнитной индукции на соответствующие координатные оси объекта 9:
Bxi=Bxp+R1cos ϕi + F1sin ϕi + C•Bzt;
Byi=Byp+R2cos ϕi + F2sin ϕi + fBzt;
Bzi=Bzp+R3cos ϕi + F3sin ϕi + (1+K)•Bzt,
где Bxi, Byi, Bzi - проекции векторов магнитной индукции на соответствующие координатные оси объекта при углах курса ϕi, крена θi = 0, тангажа ψi = 0; i = 1,2,3; Bxp, Byp, Bzp - проекции вектора магнитной индукции постоянного магнитного поля объекта на соответствующие координатные оси объекта;
R1 = (1+a) • Bxt + bByt; F1 = (1+a) • Byt-bBxt;
R2 = (1+e) • Byt + dBxt; F2 = -(1+e) • Bxt+dByt;
R3 = qBxt + hByt; F3 = qByt-hBxt; a, b, c, d, e, f, q, h, k - коэффициенты Пуассона;
Bxt, Byt, Bzt - проекции вектора магнитной индукции (геомагнитного поля) при отсутствии объекта на соответствующие оси выбранной опорной системы координат OXYZ, у которой, например, ось OX совпадает с направлением горизонтальной составляющей вектора магнитной индукции Bxt геомагнитного поля (МПЗ), касательного к магнитному меридиану и направленного на северный магнитный полюс, оси OZ совпадает с вертикальной составляющей вектора магнитной индукции Bzt геомагнитного поля и направленного вниз, а ось OY перпендикулярна осям OX и OZ и направлена в сторону востока [5].
Из трех уравнений для Bxi определяем a, b; из трех уравнений для Byi определяем d, e; из трех уравнений для Bzi определяем q, h. Изменяют по крайней мере один из двух углов θ и ψ, равных нулю, измеряют эти углы, обозначив их, например, через ψ4 ≠ 0, θ4 = θ3, ϕ4 = ϕ3, и соответствующие им проекции вектора магнитной индукции Bx4, By4, Bz4 на координатные оси объекта, которые можно представить в виде следующих уравнений:
Bx4 = Bxp + T1 + C • E;
By4 = Byp + T2 + f • E;
Bz4 = Bzp + T3 +(1+k) • E,
где T1= (1+a) • P + bS; T2= dP + (1+e) • S;
T3= qP + hS; P = l14Bxt+m14Byt + n14Bzt;
S =l24Bxt + m24Byt + n24Bzt;
E = l34Bxt + m34Byt + n34Bzt; l14, l24, l34, m14, m24, m34, n14, n24, n34 - направляющие косинусы осей системы координат объекта для значений углов ϕ4, θ4, ψ4 [6].
Из уравнений для Bx4, By4, Bz4, Bxi, Byi, Bzi, определяем соответственно c, f, k, Bxp, Byp, Bzp.
Таким образом, предлагаемый способ обеспечивает определение всех девяти коэффициентов Пуассона подвижного объекта по измеренным на объекте девяти проекциям трех векторов магнитной индукции в выбранном месте пространства для трех значений одного из трех углов курса, крена, тангажа объекта при двух других углах, равных нулю, измеренным проекциям вектора магнитной индукции при изменении и измерении по крайней мере одного из двух углов, равных нулю в предыдущем измерении, и измеренным проекциям вектора магнитной индукции в выбранном месте пространства при отсутствии объекта. Для решения этой задачи способом, принятым за прототип, необходимо измерить тридцать проекций десяти векторов магнитной индукции на координатные оси объекта и как минимум десять значений каждого из двух углов курса, крена и тангажа или курса и крена, или крена и тангажа.
Следовательно, технический результат предлагаемого способа выражается в существенном уменьшении количества изменений и измерений углов курса, крена, тангажа объекта, количества измерений проекций векторов магнитной индукции подвижного объекта, упрощении алгоритма определения коэффициентов Пуассона объекта, а значит, и уменьшении времени обработки результатов измерений.
В предлагаемом техническом решении датчик 1 (фиг. 1), блоки 2-4 и генератор 5 выполнены аналогично известному устройству для измерения параметров магнитного поля [4, с. 117]. При этом каждый блок 2-4 состоит из избирательного усилителя и синхронного детектора [7, с. 155]. Углоизмерительным устройством 7 может быть гиростабилизированная платформа (ГСП), обеспечивающая измерение трех углов вращения объекта с погрешностью около 0,5 угловых минут за счет трехосной гироскопической стабилизации ГСП относительно трех взаимно перпендикулярных осей опорной системы координат [8, с. 387-393, рис. 9]. Для высокоточного изменения углового положения подвижного объекта с погрешностью до десятых долей угловых секунд в предлагаемом техническом решении в качестве углоизмерительного устройства для измерения углов курса, крена, тангажа могут быть использованы навигационные системы на основе лазерных гироскопов [9] . Регистрирующий блок 6 и устройство обработки информации 8 могут быть реализованы преобразователем измерительным многоканальным (ПИМ-1, сертификат N 15660-96, Госстандарт России), разработанным АО "АТИС" (г. С. -Петербург).
Литература
1. Лысенко А.П. Теория и методы компенсации магнитных помех. Сб. статей "Геофизическое приборостроение". - Л.: Мингеологии и охраны недр СССР, ОКБ, 1960, вып. 7, с. 44-58.
2. Гузеев С. Т., Семевский Р.Б. Определение параметров Пуассона по измерениям магнитной индукции Т-магнитометром. Геофизическая аппаратура. - Л.: Недра, 1980, вып. 70, с 25-30.
3. Патент РФ N 2096818, G 05 D 1/08, 1997.
4. Афанасьев Ю. В. Феррозондовые приборы. - Л.: Энергоатомиздат, 1986, 188 с.
5. Яновский Б.М. Земной магнетизм. - Л.: ЛГУ, 1978, 592 с.
6. Ефимов Н.В. Квадратичные формы и матрицы. - М.: Наука, 1972, 160 с.
7. Афанасьев Ю.В., Студенцов Н.В., Щелкин А.П. Магнитометрические преобразователи, приборы, установки. -Л.: Энергия, 1972, 272 с.
8. Одинова И.В., Блюмин Т.Д., Карпухин А.В. и др. Теория и конструкция гироскопических приборов и систем -М.: Высшая школа, 1971.
9. Лукьянов Д. П., Северов Л.А., Смирнов Е.Л., Тиль А.В. Тенденция совершенствования гироскопов и гиростабилизированных платформ. Изв. вузов СССР. Приборостроение. Т.30. -Л., 1987, N 10.
Изобретение относится к области измерительной техники и может быть использовано в магниторазведке для поиска полезных ископаемых в магнитной навигации и т.д. Достигаемый технический результат - определение всех девяти коэффициентов Пуассона по существенно меньшему числу измерений, чем в ближайшем аналоге. Способ предусматривает измерение проекций вектора магнитной индукции на оси опорной системы координат при отсутствии объекта, измерении проекций векторов магнитной индукции на объекте при трех различных значениях одного из углов курса, крена, тангажа объекта, но при двух других углах, равных нулю, измерении этих углов и соответствующих им проекций вектора магнитной индукции на объекте, заданных в виде функций измеренных углов курса, крена и тангажа, измеренных проекций вектора магнитной индукции на оси опорной системы координат при отсутствии объекта и неизвестных проекций вектора магнитной индукции постоянного магнитного поля объекта и коэффициентов Пуассона объекта. 1 ил.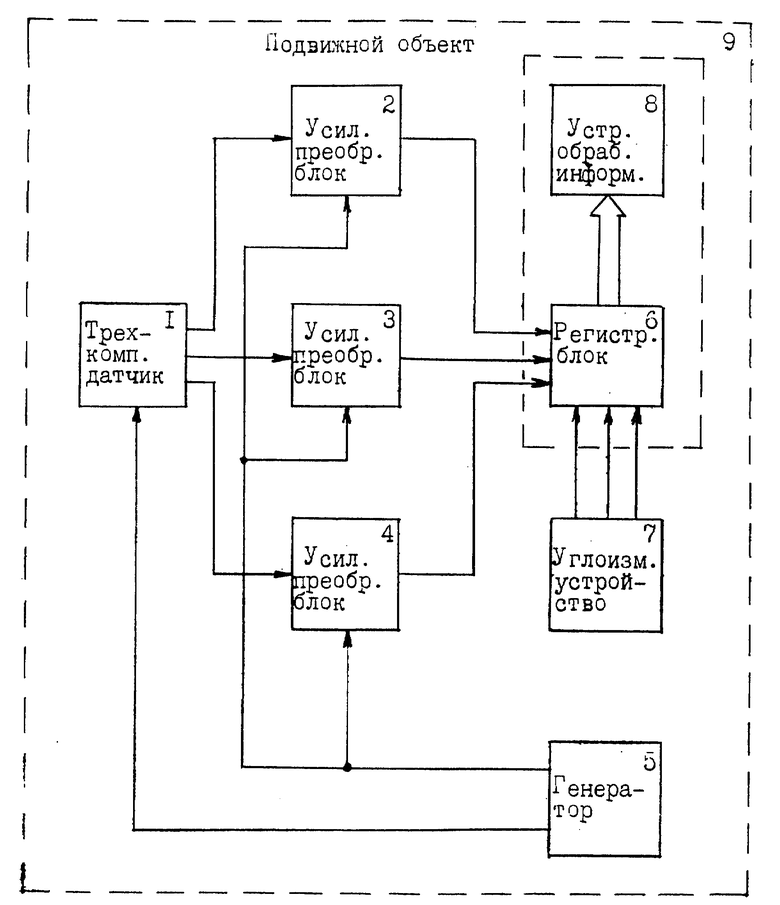
Способ определения коэффициентов Пуассона подвижного объекта в точке координат, жестко связанной с системой координат объекта, основанный на измерениях магнитной индукции в выбранном месте пространства при отсутствии подвижного объекта, размещении подвижного объекта в упомянутом месте пространства, изменении углов курса, крена, тангажа объекта относительно опорной системы координат, синхронном измерении этих углов и проекций векторов магнитной индукции на объекте на оси системы координат объекта, отличающийся тем, что магнитную индукцию в выбранном месте пространства при отсутствии подвижного объекта измеряют как проекции ее вектора на оси опорной системы координат, а проекции векторов магнитной индукции на объекте измеряют при трех различных значениях одного из углов курса, крена, тангажа объекта, но при двух других углах, равных нулю, затем изменяют по крайней мере один из двух упомянутых углов, равных нулю, измеряют эти углы и соответствующие им проекции вектора магнитной индукции на объекте и по указанным величинам, заданным в виде функций измеренных углов курса, крена и тангажа, измеренным проекциям вектора магнитной индукции магнитного поля при отсутствии объекта и проекциям вектора магнитной индукции постоянного магнитного поля объекта определяют искомые коэффициенты.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПУАССОНА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096818C1 |
| Лысенко А.П | |||
| Теория и методы компенсации магнитных полей | |||
| В сб.: Геофизическое приборостроение | |||
| - Л.: Мингеологии и охраны недр СССР, ОКБ, 1960, вып.7, с.44-58 | |||
| Гузеев С.Т | |||
| и др | |||
| Определение параметров Пуассона по измерениям магнитной индукции Т-магнитометром | |||
| В кн.: Геофизическая аппаратура | |||
| - Л.: Недра, 1980, вып.70, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
