Предлагаемое изобретение относится к области измерительной техники и может быть использовано в магниторазведке для поиска полезных ископаемых, в области космических исследований для измерения магнитного поля околоземного пространства и магнитного поля планет, в магнитной навигации для определения скорости и местоположения судна и т.д.
Известно устройство для определения магнитной индукции геомагнитного поля с подвижного объекта, содержащее размещенные на подвижном объекте модульный магнитометр, углоизмерительное устройство и устройство обработки информации [1] . При этом выход модульного магнитометра и три выхода углоизмерительного устройства подключены к устройству обработки информации. В известном техническом решении углоизмерительное устройство выполнено из трехкомпонентного феррозондового магнитометра.
Известное устройство работает следующим образом.
Измеряют углоизмерительным устройством углы курса, крена, тангажа объекта синхронно с измерением модульным магнитометром значений модулей векторов магнитной индукции. Значения измеряемых углов и модулей векторов магнитной индукции поступают на устройство обработки информации, в которое вводят также известные три коэффициента Пуассона, три суммы коэффициентов Пуассона и проекции вектора магнитной индукции объекта на оси системы координат объекта, которая обусловлена жесткой намагниченностью объекта. Три коэффициента Пуассона, три суммы коэффициентов Пуассона и вектор магнитной индукции, обусловленный жесткой намагниченностью объекта, предварительно определяют на специально оборудованном стенде по методике, изложенной в работе [2] . По результатам измеренных модулей векторов магнитной индукции, углов курса, крена, тангажа объекта, известных трех коэффициентов Пуассона, трех сумм коэффициентов Пуассона и вектору магнитной индукции, обусловленной жесткой намагниченностью объекта, устройство обработки информации определяет модули векторов магнитной индукции геомагнитного поля при различных местоположениях движущегося объекта по методике, изложенной в упомянутой работе [2] .
В известном техническом решении [1] для снижения магнитных помех от вихревых токов в месте размещения магнитометрического датчика располагают рядом с датчиком электропроводящие пластины или многовитковые катушки, замкнутые на изменяемые в полете самолета сопротивления. Такой метод компенсации магнитных помех от вихревых токов неэффективен, так как для разных частот вихревых токов одни и те же компенсационные элементы воспроизводят разные по фазе и амплитуде компенсирующие магнитные поля, что не обеспечивает компенсацию магнитных помех в месте размещения упомянутого датчика, а следовательно, приводит к погрешности определения индукции геомагнитного поля. В известном техническом решении отсутствуют какие-либо меры, исключающие или ослабляющие погрешность определения индукции геомагнитного поля от магнитных помех электрооборудования объекта. Кроме того, известное техническое решение создано для реализации алгоритма определения модуля вектора индукции геомагнитного поля, когда магнитная индукция объекта в месте размещения модульного датчика, обусловленная мягкой и жесткой намагниченностью объекта, существенно меньше магнитной индукции геомагнитного поля и составляет десятки нанотеслов [1, 3]. В том случае, когда магнитная индукция объекта в месте размещения модульного датчика, обусловленная мягкой и жесткой намагниченностью объекта, составляет единицы тысяч нанотеслов, то погрешность определения модуля вектора индукции геомагнитного поля известным техническим решением существенно возрастает.
Известно устройство для определения индукции геомагнитного поля с подвижного объекта [4], которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство состоит из размещенных на подвижном объекте трехкомпонентного магнитометрического датчика с взаимно ортогональными осями, трех усилительно-преобразовательных блоков, первые входы которых подключены к выходам упомянутого датчика, генератора переменных напряжений, первый выход которого подключей к выходу трехкомпонентного датчика, а второй выход - к вторым входам усилительно-преобразовательных блоков, регистрирующего блока, входы которого подключены к выходам усилительно-преобразовательных блоков, углоизмерительного устройства, выходы которого подключены к трем дополнительным входам регистрирующего блока, выполненного с возможностью регистрации сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта, устройства обработки информации, подключенного к выходу регистрирующего блока.
Известное устройство работает следующим образом. На вход трехкомпонентного магнитометрического датчика, в частности, феррозонда подается с генератора переменное напряжение, возбуждающее этот датчик. В результате на выходах датчика появляются три ЭДС второй гармоники, каждая из которых пропорциональна проекции вектора магнитной индукции на соответствующую магнитную ось датчика [5, с.66]. Выходные сигналы с датчика усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках. Для детектирования сигналов на вторые входы усилительно-преобразовательных блоков подается переменное напряжение с генератора переменных напряжений. На входы регистрирующего блока поступают сигналы с выходов усилительно-преобразовательных блоков, пропорциональные проекциям векторов магнитной индукции при изменении местоположения объекта, и выходные сигналы с углоизмерительного устройства, пропорциональные углам курса, крена, тангажа объекта, передающиеся на устройство обработки информации, при введении в которое всех девяти коэффициентов (параметров) Пуассона и проекций вектора магнитной индукции на оси чувствительности датчика, обусловленной жесткой намагниченностью объекта, осуществляется определение проекций вектора индукции геомагнитного поля на оси выбранной опорной системы координат.
Однако в известном техническом решении [4] отсутствуют какие-либо меры, исключающие или ослабляющие погрешность определения индукции геомагнитного поля от магнитных помех вихревых токов и электромагнитного оборудования объекта. В течение времени магнитные помехи от вихревых токов и электромагнитного оборудования объекта не остаются постоянными, что приводит к погрешности определения индукции геомагнитного поля. Кроме того, вектор магнитной индукции, обусловленный жесткой намагниченностью объекта, в течение времени также не остается постоянным, так как является функцией многих параметров, например температуры среды, изменения ферромагнитных масс объекта, механических воздействий на объект, в частности ударов волн о корпус судна, которое может выполнять роль подвижного объекта [6]. Нестабильность в течение времени жесткой намагниченности объекта приводит к существенной погрешности определения индукции геомагнитного поля.
Задачей предлагаемого изобретения является разработка устройства для определения индукции геомагнитного поля, существенно ослабляющего влияние магнитных помех от жесткой намагниченности объекта, вихревых токов и электромагнитного оборудования подвижного объекта на погрешность определения индукции геомагнитного поля.
Поставленная задача решается за счет измерения в выбранных трех точках пространства проекций векторов магнитной индукции тремя трехкомпонентными магнитометрическими датчиками, жестко связанными с подвижным объектом, синхронно с измерением углов курса, крена, тангажа объекта.
Предлагаемое устройство для определения индукции геомагнитного поля с подвижного объекта, включающее размещенные на объекте трехкомпонентный магнитометрический датчик, три усилительно-преобразовательных блока, первые входы которых подключены к соответствующим выходам трехкомпонентного датчика, генератор переменных напряжений, первый выход которого подключен к первому входу трехкомпонентного датчика, а второй выход - к вторым входам усилительно-преобразовательных блоков, регистрирующий блок, первые три входа которого подключены к соответствующим выходам первого, второго и третьего усилительно-преобразовательных блоков, углоизмерительное устройство, три выхода которого подключены соответственно к четвертому, пятому и шестому входам регистрирующего блока, выполненного с возможностью синхронной регистрации сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта, и устройство обработки информации, подключенное к выходу регистрирующего блока, снабжено вторым и третьим трехкомпонентными магнитометрическими датчиками, четвертым, пятым, шестым, седьмым, восьмым и девятым усилительно-преобразовательными блоками, вторым и третьим генераторами переменных напряжений, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к соответствующим выходам второго трехкомпонентного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к соответствующим выходам третьего трехкомпонентного датчика, первый выход второго генератора переменных напряжений подключен к первому входу второго трехкомпонентного датчика, а второй выход - к вторым входам четвертого, пятого и шестого усилительно-преобразовательных блоков, первый выход третьего генератора переменных напряжений подключен к первому входу третьего трехкомпонентного датчика, а второй выход - к вторым входам седьмого, восьмого и девятого усилительно-преобразовательных блоков, первые выходы четвертого, пятого, шестого, седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены соответственно к седьмому, восьмому, девятому, десятому, одиннадцатому и двенадцатому входам регистрирующего блока, вторые выходы первого, второго и третьего усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам первого трехкомпонентного датчика, вторые выходы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам второго трехкомпонентного датчика, а вторые выходы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам третьего трехкомпонентного датчика.
Применение в предлагаемом техническом решении размещенных на подвижном объекте трехкомпонентного магнитометрического датчика, трех усилительно-преобразовательных блоков, генератора переменных напряжений, регистрирующего блока, устройства обработки информации, углоизмерительного устройства в совокупности с размещенными на объекте вторым и третьим трехкомпонентными магнитометрическими датчиками, четвертым, пятым, шестым, седьмым, восьмым и девятым усилительно-преобразовательными блоками, вторым и третьим генераторами переменных напряжений, включенных между собой определенным образом, обеспечивает существенное снижение влияния магнитных помех от жесткой намагниченности, вихревых токов и электромагнитного оборудования объекта на погрешность определения индукции геомагнитного поля.
Таким образом, технический результат предлагаемого устройства для определения индукции геомагнитного поля с подвижного объекта выражается в снижении влияния магнитных помех от жесткой намагниченности, вихревых токов и электромагнитного оборудования подвижного объекта на погрешность определения индукции геомагнитного поля.
Сущность предлагаемого технического решения поясняется следующими графическими материалами.
На чертеже изображена структурная схема устройства для определения индукции геомагнитного поля с подвижного объекта.
Предлагаемое устройство для определения индукции геомагнитного поля с подвижного объекта состоит (фиг.1) из грех трехкомпонентных магнитометрических датчиков 1-3 с осями, коллинеарными соответствующим осям ОХ, ОУ, ОZ декартовой системы координат ОХУZ, девяти усилительно-преобразовательных блоков 4-12, трех генераторов переменных напряжений 13-15, регистрирующего блока 16, устройства обработки информации 17, углоизмерительного устройства 18, которые размещены на подвижном объекте. Первые входы блоков 4-6 подключены к соответствующим выходам датчика 1, первые входы блоков 7-9 подключены к соответствующим выходам датчика 2, первые входы блоков 10-12 подключены к соответствующим выходам датчика 3. Первый выход генератора 13 подключен к первому входу датчика 1, а второй выход - к вторым входам блоков 4-6, первый выход генератора 14 подключен к первому входу датчика 2, а второй выход - к вторым входам блоков 7-9, первый выход генератора 15 подключен к первому входу датчика 3, а второй выход - к вторым входам блоков 10-12. Первые выходы блоков 4-6 и три выхода устройства 18 подключены соответственно к первому, второму, третьему, четвертому, пятому и шестому входам блока 16. Первые выходы блоков 7-12 подключены соответственно к седьмому, восьмому, девятому, десятому, одиннадцатому и двенадцатому входам блока 16, выход которого подключен к устройству 17. Вторые выходы блоков 4-6 подключены соответственно к второму, третьему и четвертому входам датчика 1, вторые выходы блоков 7-9 подключены соответственно к второму, третьему и четвертому входам датчика 2, вторые выходы блоков 10-12 подключены соответственно к второму, третьему и четвертому входам датчика 3.
Предлагаемое устройство для определения индукции геомагнитного поля с подвижного объекта работает следующим образом. На первые входы датчиков 1-3 (фиг. 1), например, феррозондов подаются с соответствующих генераторов 13-15 переменные напряжения частотой f, перемагничивающие магниточувствительные элементы датчиков 1-3. В результате этого на трех выходах каждого из датчиков 1-3 появляются три ЭДС вторых гармоник, пропорциональные проекциям векторов магнитной индукции на магнитные оси упомянутых датчиков [5]. Эти ЭДС усиливаются и детектируются блоками 4-12, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы блоков 4-12 подаются опорные напряжения частотой 2f с вторых выходов соответствующих генераторов 13-15, а на первые входы этих блоков подаются с соответствующих выходов датчиков 1-3 переменные ЭДС частотой 2f. На второй, третий и четвертый входы датчика 1 подаются продетектированные сигналы с вторых выходов соответствующих блоков 4-6, на второй, третий и четвертый входы датчика 2 подаются продетектированные сигналы с вторых выходов соответствующих блоков 7-9, на второй, третий и четвертый входы датчика 3 подаются продетектированные сигналы с вторых выходов соответствующих блоков 10-12. Сигналы, приходящие на второй, третий и четвертый входы каждого из датчиков 1-3 с вторых выходов соответствующих блоков 4-12, обеспечивают отрицательную обратную связь по измеряемым сигналам [5]. На входы блока 16 поступают сигналы с первых выходов блоков 4-12, пропорциональные значениям проекций векторов магнитной индукции, и сигналы с выходов устройства 18, пропорциональные углам курса, крена, тангажа объекта 19. Блок 16 обеспечивает синхронную регистрацию сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта 19, и передачу их на устройство 17. При этом расстояния между датчиками 1-3 выбирают из условий минимально допустимого влияния магнитных полей, например, воспроизводимых токами компенсации этих датчиков [5]; неидентичности векторов магнитной индукции от индуктивной намагниченности объекта в местах размещения датчиков 1-3 и одинаковых влияниях внешних воздействий на датчики 1-3, в частности температурных, механических и т.д. [7]. Кроме того, расстояния от каждого датчика до электропроводящих поверхностей и электромагнитных систем объекта 19 должно быть много больше максимального из расстояний между упомянутыми датчиками 1-3. Поэтому векторы магнитной индукции от вихревых токов и электромагнитного оборудования объекта, а следовательно, и проекций этих векторов на оси соответствующих датчиков 1-3 можно принять равными. В таком случае, проекции векторов магнитной индукции в местах размещения датчиков 1-3 можно представить в следующем виде:
Bx1i=(I+a1)F1i+b1F2i+c1F3i+Bхр1+Bхэi;
By1i=d1F1i+(I+e1)F2i+f1F3i+Bур1+Bуэi;
Bz1i=q1F1i+h1F2i+(I+k1)F3i+Bzp1+Bzэi;
Bx2i=(I+a2)F1i+b2F2i+c2F3i+Bxp2+Bхэi;
By2i=d2F1i+(I+e2)F2i+f2F3i+Bур2+Bуэi;
Bz2i=q2F1i+h2F2i+(I+k2)F3i+Bzp2+Bzэi;
Bx3i=(I+a3)F1i+b3F2i+c3F3i+Bхр3+Bхэi;
By3i=d3F1i+(I+e3)F2i+f3F3i+Bур3+Bуэi;
Bz3i=q3F1i+h3F2i+(I+k3)F3i+Bzp3+Bzэi;
где (Bx1i, By1i, Bz1i), (Bx2i, By2i, Bz2i,) (Bx3i, By3i, Bz3i,) - проекции векторов магнитной индукции, измеренные в местах размещения датчиков 1-3; aj, bj, cj, dj, ej, fj, qj, hj, kj - параметры Пуассона объекта в местах размещения датчиков 1-3; j=1, 2, 3; F1i=l1iBхт+m1iBут+n1iBzт; F2i= l2iBхт+m2iBут+n2iBzт; F3i=l3iBхт+m3iBут+n3iBzт; (l1i, m1i, n1i), (l2i, m2i, n2i), (l3i, m3i, n3i) - направляющие косинусы осей системы координат датчиков 1-3 в опорной, например, геомагнитной системе координат, являющиеся функциями углов курса, крена, тангажа объекта; i=1, 2, 3,... - номера угловых положений объекта 19; Вхт, Вут, Вzт - проекции вектора индукции геомагнитного поля в выбранной опорной системе координат; (Вxp1, Вyp1, Вzp1), (Вxp2, Вyp2, Вzp2), (Вxp3, Вyp3, Вzp3) - проекции векторов магнитной индукции от жесткой намагниченности объекта 19 в местах размещения датчиков 1-3; Вхэi, Вуэi, Вzэi - проекции вектора магнитной индукции, обусловленной вихревыми токами и электромагнитным оборудованием объекта 19.
В устройстве 17 осуществляется определение разностей проекций векторов магнитной индукции, измеренных в месте размещения датчиков 1-3, которые будут иметь следующий вид:
Bx1i-Bx2i=a12F1i+b12F2i+c12F3i+Bxp12;
By1i-By2i=d12F1i+e12F2i+f12F3i+Byp12;
Bz1i-Bz2i=q12F1i+h12F2i+k12F3i+Bzp12;
Bx1i-Bx3i=a13F1i+b13F2i+c13F3i+Bxp13;
By1i-By3i=d13F1i+e13F2i+f13F3i+Byp13;
Bz1i-Bz3i=q13F1i+h13F2i+k13F3i+Bzp13,
где a12= a1-a2; b12=b1-b2; c12=c1-c2; d12=d1-d2; e12=e1-e2; f12=f1-f2;
q12=q1-q2; h12=h1-h2; k12=k1-k2.
В последние уравнения не входят Вхэi, Вуэi, Вzэi. Каждая проекция вектора магнитной индукции от жесткой намагниченности объекта в местах размещения датчиков 1-3 равна произведению остаточной намагниченности объекта (тела) на производную второго порядка гравитационного потенциала, созданного объектом 19 (фиг.1), по соответствующим проекциям радиуса-вектора выбранной точки пространства (в частности, в точке пространства, в которой размещен датчик 1, в точке пространства, в которой размещен датчик 2, и в точке пространства, в которой размещен датчик 3) в предположении, что плотность объекта равна обратной величине гравитационной постоянной [6, 7]. Поэтому изменение проекций векторов магнитной инцукции от жесткой намагниченности объекта 19 для каждой из трех рядом выбранных точек пространства, жестко связанных с объектом, будет зависеть в основном от нестабильности остаточной намагниченности объекта, обусловленной, например, изменением температуры окружающей среды, напряженности магнитного поля и механических воздействий на объект [6, 7]. В таком случае, отношение одноименных проекций векторов магнитной индукции от жесткой намагниченности объекта, а следовательно, и их разностей, в частности, Вxp13/Bxp12=Sx, Вyp13/Byp12=Sy, Bzp13/Bzp12=Sz для мест размещения датчиков 1-3 можно считать постоянными. Постоянство Sх, Sy, Sz дает возможность исключить определение проекций векторов магнитной индукции от жесткой намагниченности объекта и влияние изменения жесткой намагниченности объекта на погрешность определения проекций вектора индукции геомагнитного поля. Систему последних трех уравнений можно записать в следующем виде:
Bx1i-Bx3i=(Bx1i-Bx2i)Sx+(a13-Sxa12)F1i+
+(b13-Sxb12)F2i+(c13-Szc12)F3i;
By1i-By3i=(By1i-By2i)Sy+(d13-Syd12)F1i+
+(e13-Sye12)F2i+(f13-Szf12)F3i;
Bz1i-Bz3i=(Bz1i-Bz2i)Sz+(q13-Szq12)F1i+
+(h13-Szh12)F2i+(k13-Szk12)F3i;
Последние уравнения являются функциями измеренных разностей проекций векторов магнитной индукции, постоянных Sx, Sy, Sz, разностей параметров Пуассона объекта и входящих в F1i, F2i, F3i углов курса, крена, тангажа объекта и проекций вектора индукции геомагнитного поля.
Параметры a= a13-Sxa12, b= b13-Sxb12, c= c13-Sxc12, d=d13-Syd12, e= e13-Sze12, f=f13-Syf12, q=q13-Szq12, h=h13-Szh12, k=k13-Szk12 и постоянные Sx, Sy, Sz, могут быть определены перед выходом объекта, например, в акваторию проведения магнитной съемки по проекциям векторов магнитной индукции синхронно измеренными с углами курса, крена, тангажа объекта для выбранных десяти (i= 1, 2,..., 10) угловых положений объекта и известному модулю вектора индукции геомагнитного поля в месте размещения объекта по методу [4, 8] . По известным же a, b, c, d, e, f, q, h, k Sx, Sy, Sz, разностям проекций векторов магнитной индукции, измеренным синхронно с углами курса, крена, тангажа объекта, находящегося, например, в акватории магнитной съемки, устройством 17 (фиг.1) осуществляется определение Вхт, Вут, Bzт путем решения системы последних трех уравнений при каждом угловом положении объекта.
Решение (Вхт, Вут, Bzт) последней системы уравнений не зависит от изменения проекций векторов магнитной индукции, обусловленных жесткой намагниченностью, вихревыми токами и электромагнитным оборудованием объекта. Таким образом, предлагаемое техническое решение исключает влияние магнитных помех от вихревых токов и электромагнитного оборудования объекта, а также от намагниченности и нестабильности жесткой намагниченности объекта на погрешность определения индукции геомагнитного поля.
В предлагаемом устройстве для определения индукции геомагнитного поля с подвижного объекта (фиг.1) датчики 1-3, блоки 4-12 и генераторы 13-15 могут быть выполнены аналогично известному устройству для измерения параметров магнитного поля [5] . Углоизмерительным устройством 18 может быть гиростабилизированная платформа, обеспечивающая измерение трех углов вращения объекта с погрешностью около 0,5 угловых минут за счет трехосной гироскопической стабилизации гиростабилизированной платформы относительно опорной системы координат [9]. Регистрирующий блок 16 и устройство обработки информации 17 могут быть реализованы преобразователем измерительным многоканальным (ПИМ-I, сертификат 15660-96, Госстандарт России), разработанным АО "АТИС" (г. С.-Петербург).
Литература
1. Лысенко А.П. Теория и методы компенсации магнитных помех// Геофизическое приборостроение. Л.: Изд-во Мингеологии и охраны недр СССР. ОКБ. 1960. Вып.7. С.44-58.
2. Резник Э.Е., Канторович В.Л. Некоторые вопросы компенсации магнитных полей самолета//Геофизическое приборостроение. Л.: "Недра". 1964. Вып.18. С. 26-38.
3. Вацуро А.Э., Цирель B.C. Измерение и компенсация магнитных помех самолета АН-2//Геофизическая аппаратура. Л.: "Недра". 1979. С.73-100.
4. Пат. 2096818 РФ. Способ определения коэффициентов Пуассона подвижного объекта и устройство для его осуществления / Б.М. Смирнов// Бюл. изобрет. - 1997. 32.
5. Афанасьев Ю. В. Феррозондовые приборы. Л.: "Энергоатомиздат". 1986. 188 с.
6. Кожухов В. П. , Воронов В.В., Григорьев В.В. Магнитные компасы. М.: Транспорт. 1981. 216 с.
7. Яновский Б.М. Земной магнетизм. Л.: ЛГУ. 1978. 592 с.
8. Смирнов Б.М. Решение задачи магнитной совместимости датчика тесламетра с подвижным объектом//Измерительная техника. 1997. 9. С.44-46.
9. Теория и конструкция гироскопических приборов и систем// И.В. Одинова, Г.Д. Блюмин, А.В. Карпухин и др. М.: Высшая школа. 1971. 508 с.
Изобретение относится к измерительной технике и может быть использовано в магниторазведке для поиска полезных ископаемых, в области космических исследований для измерения магнитного поля околоземного пространства и магнитного поля планет, в магнитной навигации для определения скорости и местоположения судна и т.д. Сущность изобретения: устройство для определения индукции геомагнитного поля с подвижного объекта содержит размещенные на объекте три трехкомпонентных магнитометрических датчика, девять усилительно-преобразовательных блоков, три генератора переменных напряжений, регистрирующий блок, углоизмерительное устройство, устройство обработки информации, включенные между собой определенным образом. Технический результат: исключение влияния магнитных помех от намагниченности, вихревых токов и электромагнитного оборудования объекта на погрешность определения индукции геомагнитного поля. 1 ил.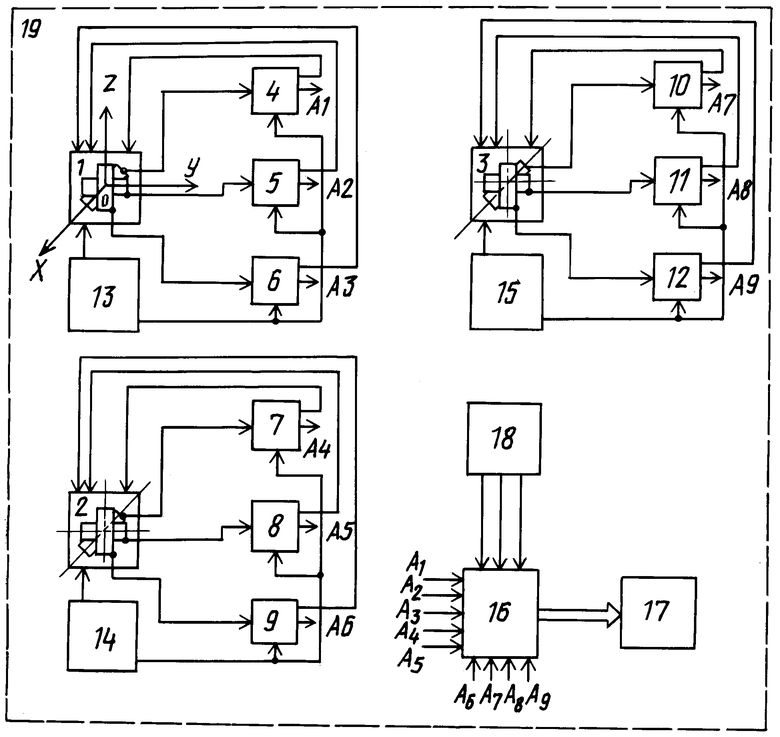
Устройство для определения индукции геомагнитного поля с подвижного объекта, включающее размещенные на объекте трехкомпонентный магнитометрический датчик, три усилительно-преобразовательных блока, первые входы которых подключены к соответствующим выходам трехкомпонентного датчика, генератор переменных напряжений, первый выход которого подключен к первому входу трехкомпонентного датчика, а второй выход - к вторым входам усилительно-преобразовательных блоков, регистрирующий блок, первые три входа которого подключены к соответствующим выходам первого, второго и третьего усилительно-преобразовательных блоков, углоизмерительное устройство, три выхода которого подключены соответственно к четвертому, пятому и шестому входам регистрирующего блока, выполненного с возможностью синхронной регистрации сигналов, пропорциональных значениям проекции векторов магнитной индукции и углов курса, крена, тангажа объекта, и устройство обработки информации, подключенное к выходу регистрирующего блока, отличающееся тем, что оно снабжено вторым и третьим трехкомпонентными магнитометрическими датчиками, четвертым, пятым, шестым, седьмым, восьмым и девятым усилительно-преобразовательными блоками, вторым и третьим генераторами переменных напряжений, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к соответствующим выходам второго трехкомпонентного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к соответствующим выходам третьего трехкомпонентного датчика, первый выход второго генератора переменных напряжений подключен к первому входу второго трехкомпонентного датчика, а второй выход - к вторым входам четвертого, пятого и шестого усилительно-преобразовательных блоков, первый выход третьего генератора переменных напряжений подключен к первому входу третьего трехкомпонентного датчика, а второй выход - к вторым входам седьмого, восьмого и девятого усилительно-преобразовательных блоков, первые выходы четвертого, пятого, шестого, седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены соответственно к седьмому, восьмому, девятому, десятому, одиннадцатому и двенадцатому входам регистрирующего блока, вторые выходы первого, второго и третьего усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам первого трехкомпонентного датчика, вторые выходы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам второго трехкомпонентного датчика, а вторые выходы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам третьего трехкомпонентного датчика.
| RU 2168188 С1, 27.05.2001 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПУАССОНА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096818C1 |
| Способ получения растворимых полиимидов | 1976 |
|
SU671323A1 |
| Устройство для разрушения негабаритных кусков горной породы | 1982 |
|
SU1057113A1 |

