Изобретение относится к авиационной технике и может быть использовано при выполнении операций по транспортированию и монтажу крупногабаритных неделимых грузов.
Известно устройство для транспортирования груза вертолетами, содержащее подвесные системы вертолетов, соединенную с ними распорную конструкцию, к которой в средней части прикреплен узел подвески груза (патент РФ №1663886, кл. В64D 1/22, 1994). Недостатком известного устройства является громоздкость по вертикали, что затрудняет точную установку груза.
Известно также устройство для транспортирования груза вертолетами, содержащее подвесные системы вертолетов, соединенную с ними распорную конструкцию, в средней части которой размещен узел подвески груза (патент РФ №1648020, кл. В64D 1/22, 1994). Узел подвески груза содержит грузовой трос, концы которого прикреплены к подвесным системам вертолетов, огибает все блоки с возможностью перекатывания по ним. Такое выполнение устройства обеспечивает неизменное положение узла подвески груза - в середине распорной конструкции. Однако известное устройство не обеспечивает устранение рассогласования груза с проектными отметками (фундаментом) по углу в плане (по азимуту) при заходе вертолетов на монтаж против направления ветра.
Наиболее близким по технической сущности, т.е. прототипом, является устройство для транспортирования груза двумя вертолетами, содержащее подвесные системы вертолетов, соединенную с ними распорную конструкцию, в средней части которой смонтирована платформа с установленной на ней грузовой траверсой с прикрепленными к ее концам грузозахватными приспособлениями и приводом, обеспечивающим вращение траверсы вокруг вертикальной оси (патент РФ №2149802, кл. 7 В64D 9/00, 2000). Такое выполнение устройства обеспечивает неизменное положение узла подвески груза - в середине распорной конструкции. Кроме того, наличие грузовой траверсы с приводом может обеспечить поворот груза по азимуту при зависании вертолетов над местом установки (монтажа). Это позволяет выполнить одну из монтажных операций - поворот груза вокруг вертикальной оси, т.е. устранить ошибку захода вертолетов по углу в плане. Однако при заходе на монтаж с ошибкой по боковому смещению от строительной оси фундамента для точной установки груза будут необходимы синхронные боковые маневры обоих вертолетов. Такие горизонтальные маневры обоими вертолетами вместе с грузом являются весьма сложной задачей и могут привести к неоправданно высоким затратам летного времени, вызванным усложнением пилотирования для обоих командиров вертолетов.
Задачей настоящего изобретения является достижение технического результата, заключающегося в обеспечении дополнительной возможности корректировки положения груза без изменения положения вертолетов при их зависании над местом монтажа, а именно - бокового перемещения груза. Это должно обеспечить снижение затрат летного времени на установку груза в заданное положение вертолетами и сокращение сроков выполняемых работ с более высокими экономическими показателями.
Достижение указанного технического результата обеспечивается за счет того, что в устройстве для транспортирования груза вертолетами имеющейся платформе с грузовой траверсой обеспечена дополнительная возможность управляемого с борта вертолетов перемещения вдоль продольной оси распорной конструкции посредством имеющегося привода вращения грузовой траверсы, но дополнительно снабженного механизмом торможения барабана.
Сущность изобретения состоит в том, что в устройстве для транспортирования и монтажа груза вертолетами, содержащем подвесные системы вертолетов, соединенную с ними распорную конструкцию, в средней части которой смонтирована платформа с установленной на ней с возможностью вращения вокруг вертикальной оси грузовой траверсой с прикрепленными к ее концам грузозахватными приспособлениями и приводом, выполненным в виде прикрепленного к грузовой траверсе барабана, на который навиты тросы, свободный конец каждого из которых запасован на лебедку, установленную на каждом вертолете, согласно изобретению платформа смонтирована с возможностью перемещения вдоль продольной оси распорной конструкции и снабжена фиксатором ее положения, а привод грузовой траверсы дополнительно снабжен механизмом торможения барабана.
Кроме того, предлагаемое устройство дополнительно отличается тем, что распорная конструкция снабжена направляющими, расположенными вдоль ее продольной оси и обеспечивающими перемещение платформы, фиксатор положения платформы и механизм торможения барабана выполнены электромеханическими и размещены на платформе, система управления приводом содержит блокиратор, обеспечивающий включение лебедок после растормаживания фиксатора положения платформы или механизма торможения барабана, а между лебедками введена обратная связь, обеспечивающая их одновременное включение в противоположных направлениях.
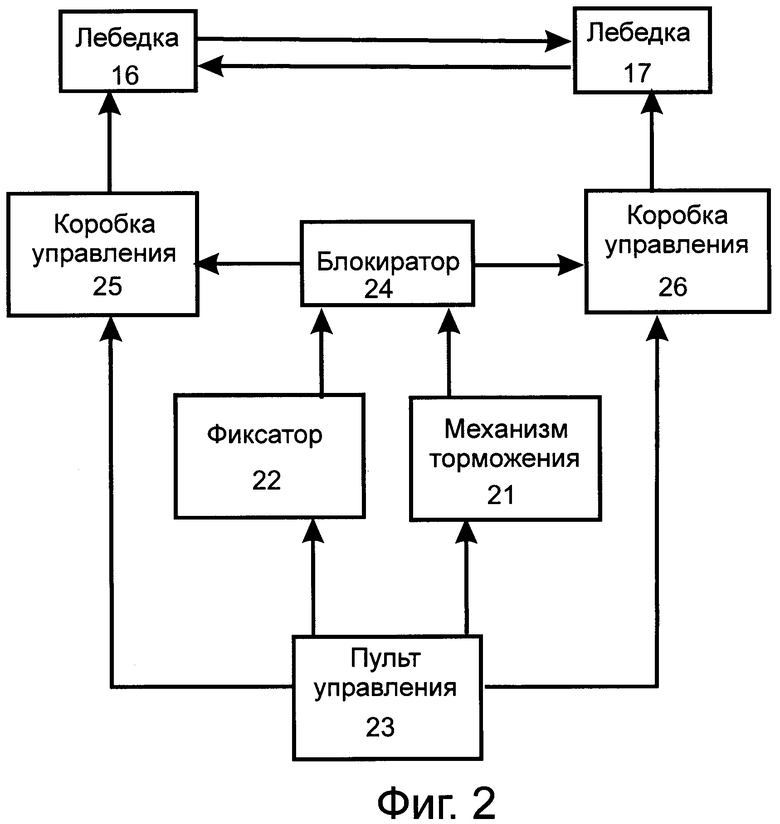
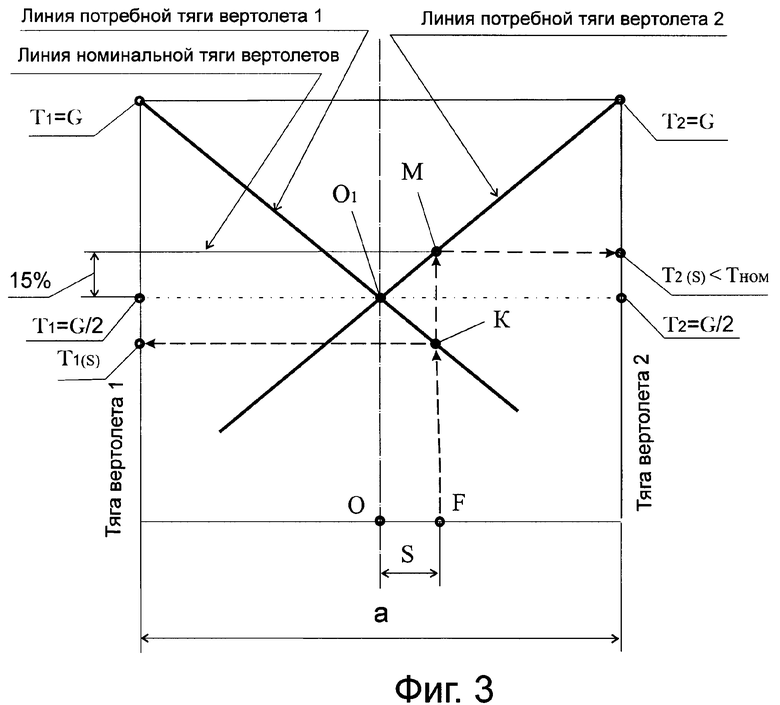
Сущность изобретения поясняется чертежами, где на фиг.1 изображено устройство при установке груза на фундамент; на фиг.2 - блок-схема системы управления устройством; на фиг.3 - номограмма для определения потребной тяги вертолетов в зависимости от положения груза на распорной конструкции при работе устройства.
Устройство для транспортирования и монтажа груза вертолетами 1 и 2 содержит их подвесные системы, например канаты 3 и 4, к которым посредством шарниров 5 присоединена распорная конструкция 6. В ее средней части размещен узел подвески груза 7, содержащий платформу 8, установленную с возможностью перемещения с помощью роликов 9 по направляющим, расположенным вдоль продольной оси распорной конструкции 6. В качестве направляющих могут быть использованы верхние продольные силовые элементы распорной конструкции 6. На платформе 8 посредством радиально-упорных подшипников смонтирован вал 10 с возможностью вращения вокруг вертикальной оси. К валу 10 с помощью звеньев 11 (например, тяг или канатов) присоединена грузовая траверса 12. Таким образом, грузовая траверса 12 вместе с валом 10 имеет возможность совершать повороты вокруг своей оси в двух противоположных направлениях и совершать перемещения вместе с платформой 8 вдоль продольной оси распорной конструкции 6. Для выполнения управляемых поворотов и перемещений грузовой траверсы 12 устройство снабжено приводом с системой управления.
Привод выполнен следующим образом. Сверху на валу 10 жестко закреплен барабан 13, на который в противоположных направлениях наветы и закреплены концы тросов 14 и 15. Эти тросы другими концами запасованы на лебедки 16 и 17, установленные на вертолетах 1 и 2. При этом возможно использование штатных лебедок, обычно применяемых на вертолетах для проведения спасательных или погрузочно-разгрузочных работ. Для придания необходимого направления тросам 14 и 15 при их совместной работе с барабаном 13 и с лебедками 16 и 17 на краях распорной конструкции 6 установлены отклоняющие блоки 18.
К концам траверсы 12 прикреплены грузозахватные приспособления, например стропы 19 с грузозахватами 20 (крюками, электрозамками, скобами и т.п.).
На платформе 8 установлены механизм торможения 21 барабана 13 и фиксатор 22 положения платформы 8 относительно распорной конструкции 6. Оба эти механизма могут быть выполнены в виде электромеханических тормозов, т.е. иметь тормозные колодки с приводом, например, в виде соленоида с толкателем. При отсутствии тока в электроцепи оба механизма находятся в замкнутом положении, т.е. обеспечивают торможение.
Для согласованного управления лебедками 16 и 17, механизмом торможения 21 и фиксатором 22 между вертолетами 1 и 2 по канатам 3, 4 и распорной конструкции 6 проложены электрокабели системы управления (не показаны). В систему управления (блок-схема которой представлена на фиг.2) входят пульт 23, размещенный на одном из вертолетов, блокиратор 24, размещенный на распорной конструкции 6, и коробки управления 25 и 26, размещенные на вертолетах рядом с лебедками 16 и 17. Блокиратор 24 предназначен для исключения возможности работы лебедок 16 и 17 без размыкания механизма торможения 21 или фиксатора 22. Поэтому даже при поступлении команды с пульта 23 на коробки управления 25 и 26 без сигнала от блокиратора 24 лебедки 16 и 17 не включаются. На пульте 23 для удобства управления может быть установлена рукоятка (джойстик - не показан) с двумя рабочими движениями: поперечным и вращательном. При этом пульт 23 располагают так, чтобы движения джойстика были мнемоническими, т.е. совпадали с необходимыми эволюциями груза 7 при его установке. Во всех случаях работы устройства система управления обеспечивает два основных условия: первое - лебедки 16 и 17 включаются одновременно и только в разных направлениях; второе - включение лебедок происходит лишь после размыкания или механизма торможения 21 или фиксатора 22, т.е. после растормаживания либо барабана 13, либо платформы 8. Для обеспечения первого условия между лебедками 16 и 17 введена электрическая обратная связь, а для обеспечения второго - блокиратор 24.
Предлагаемое устройство работает следующим образом. При зависании вертолетов 1 и 2 над расположенной на земле распорной конструкцией 6 подцепляют к ее шарнирам 5 канаты 3 и 4, соединяют быстродействующие разъемы электрокабелей и тросов 14 и 15. При этом платформа 8 и барабан 13 должны быть в нейтральном (исходном) положении: платформа - посредине распорной конструкции 6, а барабан - с равными возможностями поворота в обоих направлениях. Механизм торможения 21 барабана и фиксатор 22 платформы обесточены и находятся в замкнутом положении, т.е. обеспечивают торможение.
Подняв распорную конструкцию 6, вертолеты 1 и 2 перемещают ее к грузовой площадке, где посредством грузозахватных приспособлений 19 и 20 подцепляют к устройству груз 7, подготовленный к транспортированию и монтажу.
После подъема груз 7 транспортируют к месту установки. При этом нагрузки на вертолет 1 и вертолет 2 распределены поровну и обеспечиваются условия: Т1=G/2 и Т2=G/2, a T1+Т2=G, где T1 - тяга вертолета 1, Т2 - тяга вертолета 2, a G - вес груза 7. На номограмме для определения потребной тяги вертолетов 1 и 2, представленной на фиг.3, это соответствует исходному положению груза 7, т.е. посредине распорной конструкции 6 длиной "а" (исходная точка О на горизонтальной оси). Соответственно в месте пересечения линий потребной тяги для обоих вертолетов, т.е. в точке O1 (над точкой О), определяются величины Т1=Т2=G/2.
Заход и зависание над местом монтажа выполняют против ветра, чтобы иметь полную грузоподъемность (номинальную тягу) вертолетов. При этом пилоты выполняют заход по заранее выбранным при предполетной подготовке наземным ориентирам.
Если заход на монтаж выполнен точно и не потребовалось дополнительных манипуляций, груз 7 устанавливают на фундамент 27 в проектное положение. В этом (идеальном) случае все электроцепи системы управления устройства обесточены, т.к. не было необходимости в управляющих действиях.
При несовпадении груза 7 с проектным направлением осей фундамента 27 приводом разворачивают траверсу 12 и груз 7 по азимуту на необходимый угол (см. фиг.1). Для выполнения этой операции вращением в необходимом направлении рукоятки пульта 23 подают сигналы в коробки управления 25 и 26 для включения лебедок 16 и 17. При этом одновременно с пульта подается сигнал на размыкание механизма торможения 21. Происходит растормаживание барабана 13, а платформа 8 остается заторможенной фиксатором 22. От датчика разомкнутого положения механизма торможения 21 подается сигнал на блокиратор 24, посылающий в свою очередь сигнал в коробки управления 25 и 26, которые включают в работу лебедки 16 и 17. Поворот барабана 13 и вместе с ним груза 7 в заданном направлении (например, по часовой стрелке) достигается за счет сматывания троса 14 с барабана 13 посредством лебедки 16, включенной в режиме "на уборку". В это время лебедка 17 согласованно включается "на выпуск", и выпускаемый с нее трос 15 наматывается на барабан 13, подготавливая возможность управляемого вращения последнего в обратном направлении. При необходимости поворота груза 7 в обратном направлении (против часовой стрелки) изменением направления вращения рукоятки на пульте 23 меняют режимы работы лебедок 16 и 17 на встречные.
При несовпадении вертикальной оси груза 7 со строительной осью фундамента 27 на величину "S" перемещением (наклоном) рукоятки пульта 23 в необходимом направлении подают сигналы в коробки управления 25 и 26 для включения лебедок 16 и 17. При этом подается сигнал на размыкание фиксатора 22. Происходит растормаживание платформы 8, а барабан 13 остается заторможенным. От датчика разомкнутого положения фиксатора 22 подается сигнал на блокиратор 24, посылающий в свою очередь сигнал в коробки управления 25 и 26, которые включают в работу лебедки 16 и 17. Происходит перемещение платформы 8 вместе с заторможенным барабаном 13 и вместе с ним груза 7 в необходимом направлении, например, вправо по фиг.1, за счет укорачивания троса 15, навиваемого на лебедку 17, включенной в режиме "на уборку". В это время согласованно включается "на выпуск" лебедка 16, и выпускаемый с нее трос 14 удлиняется, обеспечивая возможность управляемого перемещения платформы 8 вдоль распорной конструкции 6.
Перемещение груза 7 вдоль продольной оси распорной конструкции 6 на расстояние "S" (вправо по фиг.1 и фиг.3) приводит к перераспределению нагрузок на вертолеты. Соответственно пилоты, балансируя вертолеты, изменяют тягу вертолетов до значений T1(S) и T2(S), которые необходимо иметь вертолетам после смещения груза на величину S. Эти значения тяги для каждого из двух вертолетов рассчитывают и определяют по номограмме заранее, при предполетной подготовке. Например, значения потребной тяги каждого вертолета для точки F, в которой оказался груз после смещения на величину S, находят, проведя вертикаль из точки F до пересечения с линиями потребной тяги (в точках К или М). Так в точке К получаем величину потребной тяги вертолета 1, а в точке М - величину потребной тяги вертолета 2. Для выполнения висения в этой ситуации необходимо, чтобы T1(S)<T2(S)≤Тном, где Тном - тяга каждого вертолета на номинальном режиме работы двигателей. Поэтому в самом начале подготовки к выполнению работы подбирают тип вертолета, удовлетворяющего условию: 2Тном≥G, т.е. тяга обоих вертолетов должна быть с запасом, обеспечивающим перемещения груза 7 на величину ±S.
Добившись совпадения всех осей груза 7 с проектными отметками, снижением вертолетов 1 и 2 устанавливают груз 7 в заданное положение, после чего производят отцепку от него приспособлений 20 и выполняют полет вертолетов 1 и 2 с предлагаемым устройством за следующим грузом или на посадку.
Предлагаемое устройство облегчает пилотирование комплекса, состоящего из двух вертолетов, при точной установке груза, т.к. выполнение двух монтажных операций по устранению ошибок захода (по азимуту и по боковому смещению) не требует изменения положения вертолетов при их зависании над местом монтажа.
Реальность применения устройства определяется следующим. При регламентированном расстоянии между концами лопастей вертолетов, равном диаметру несущего винта (D), длина распорной конструкции 6 должна быть: а≤2D. Как показывают расчеты, 15%-ный запас тяги вертолетов, обычно принимаемый для выполнения монтажных работ по сравнению с обычным транспортированием груза, обеспечивает величину S=0,1D. При использовании современных вертолетов средней и большой грузоподъемности величина "S" может быть в диапазоне ±1,6...3,5 м (поскольку вертолет Ка-32 грузоподъемностью 5 т имеет D=15,9 м, вертолеты Ми-10К и Ми-26 грузоподъемностью 10 и 20 т соответственно имеют D=35 м и D=32 м). Таким образом, использование современных вертолетов позволяет реально устранять боковые ошибки захода на монтаж комплекса, состоящего из двух вертолетов.
Кроме того, может быть расширена область применения вертолетов на строительно-монтажных работах, т.к. грузоподъемность одного вертолета не всегда отвечает современным потребностям строительства и реконструируемых промышленных объектов.
В результате может быть обеспечена высокая точность установки груза и минимальные затраты летного времени при использовании комплекса, состоящего из двух вертолетов. Применение предложенного устройства обеспечит использование полной грузоподъемности комплекса вертолетов, а также сокращение сроков строительно-монтажных и аварийно-восстановительных работ за счет укрупнения устанавливаемых в одном полете блоков, например строительных ферм, пролетов мостов и т.п.
Изобретение относится к авиационной технике, в частности к устройствам для транспортирования грузов вертолетами. Устройство содержит подвесные системы, к которым присоединена распорная конструкция. В средней части распорной конструкции размещена платформа с установленной на ней с возможностью вращения грузовой траверсой. К концам траверсы прикреплены грузозахватные приспособления. Для выполнения поворотов и перемещений грузовой траверсы устройство снабжено приводом. Платформа смонтирована с возможностью перемещения вдоль продольной оси распорной конструкции. Дополнительно платформа снабжена фиксатором, а привод грузовой траверсы снабжен механизмом торможения барабана. Решение обеспечивает дополнительную возможность корректировки положения груза без изменения положения вертолетов при их зависании над местом багажа, а именно бокового перемещения груза. 4 з.п. ф-лы, 3 ил.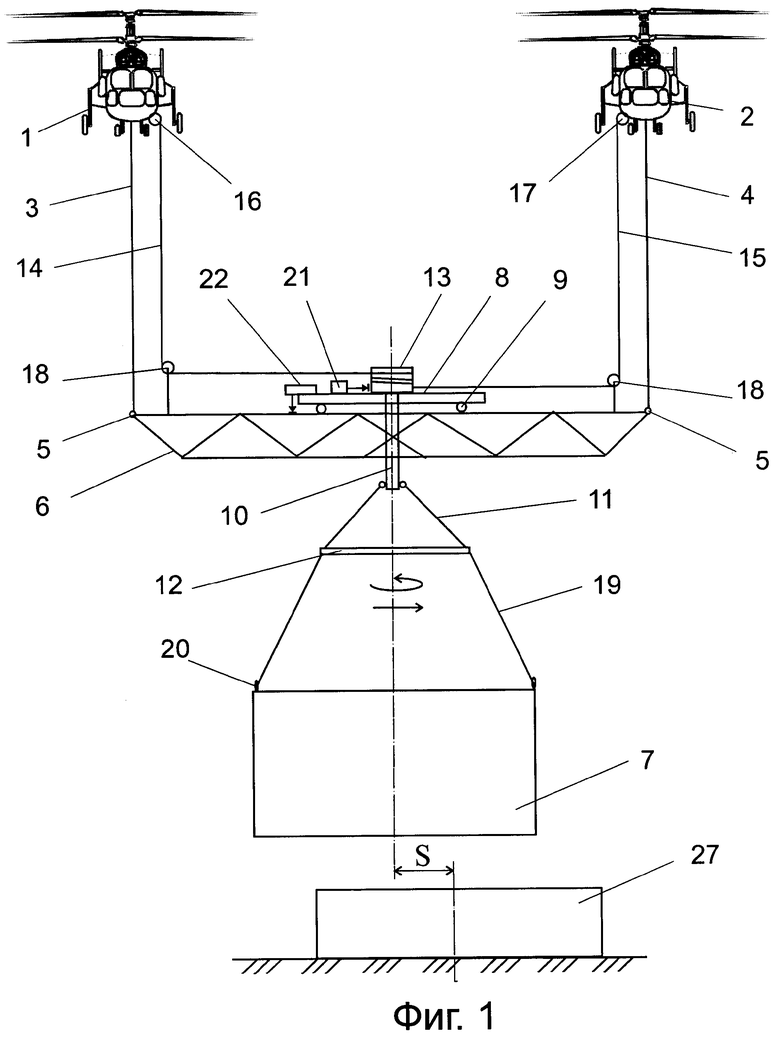
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗА ВЕРТОЛЕТАМИ | 1998 |
|
RU2149802C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗА ВЕРТОЛЕТАМИ НА ВНЕШНЕЙ ПОДВЕСКЕ | 1989 |
|
RU1663886C |
| ПЛАТФОРМА ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ НА НАРУЖНЫХ ЗАХВАТАХ ВЕРТОЛЕТА | 0 |
|
SU277563A1 |
| Опорная рама для движущейся части конвейера | 1984 |
|
SU1186556A1 |
| JP 5340001 A, 21.12.1993. | |||

