Изобретение относится к системе управления серводвигателем. Более конкретно, настоящее изобретение относится к предохранительной схеме торможения с выдержкой времени для системы управления серводвигателем.
Системы сервоуправления известны и используются везде, где требуется точное перемещение с помощью двигателя. Одна такая система сервоуправления показана на фиг. 1 (патент US 5177930).
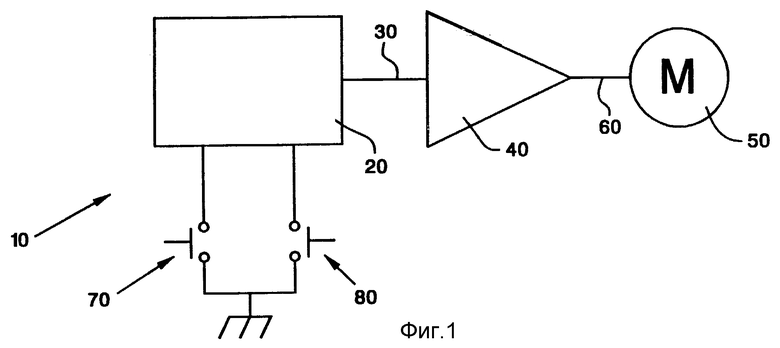
Показанная на фиг. 1 система сервоуправления, обозначенная позицией 10, содержит программируемый блок управления 20, вырабатывающий выходной сигнал, который подается по одной или более линиям 30 на сервоусилитель 40 для управления им. Сервоусилитель 40 в свою очередь управляет серводвигателем 50, с которым он соединен посредством одной или более линий 60. Выполнение заранее заданного профиля движения, который хранится в памяти программируемого блока управления 20, может быть начато с помощью пускового выключателя 70. При обнаружении нажатия на кнопочный пусковой выключатель 70 программируемый блок управления 20 подает по линии 30 соответствующие сигналы управления на сервоусилитель 40, который в соответствии с принятыми сигналами управления приводит во вращение серводвигатель 50, чтобы выполнить требуемый профиль движения.
При выполнении профиля движения может возникнуть случай, когда необходимо остановить движение серводвигателя 50, например, в случае аварии, чтобы предотвратить повреждение. Соответственно, может быть использован аварийный выключатель остановки 80, "указывающий" программируемому блоку управления 20 на то, что необходимо прекратить движение серводвигателя 50. При обнаружении нажатия на аварийный выключатель остановки 80 программируемый блок управления 20 подает соответствующие управляющие команды на сервоусилитель 40, чтобы прекратить дальнейшее движение серводвигателя 50.
Одна возможная проблема, связанная с вышеописанной системой управления, заключается в том, что последняя неспособна обнаружить возможный отказ программируемого блока управления 20 или сервоусилителя 40. Более конкретно, программируемый блок управления 20 может не обнаружить приведение в действие аварийного выключателя остановки 80 и/или не подавать соответствующие сигналы торможения на сервоусилитель 40. Аналогично, сервоусилитель 40 может "неправильно" принимать и/или реагировать на сигналы торможения, вырабатываемые программируемым блоком управления 20, когда он обнаруживает приведение в действие аварийного выключателя остановки 80. В любом случае, серводвигатель 50 может продолжать работать в ситуации, при которой его работа должна быть обязательно прекращена.
Предлагается система управления серводвигателем, которая позволяет решить проблему выключения серводвигателя во время повреждения программируемого блока управления и/или сервоусилителя. Предложенная система управления серводвигателем содержит программируемый блок управления, вырабатывающий один или более выходных сигналов для управления сервоусилителем. Система содержит также серводвигатель, управляемый сервоусилителем, и предохранительный выключатель, соединенный с программируемым блоком управления, который обнаруживает приведение его в действие. Когда программируемый блок управления обнаруживает приведение в действие предохранительного выключателя, он управляет сервоусилителем, чтобы остановить серводвигатель. Между сервоусилителем и серводвигателем расположено тормозное устройство с выдержкой времени, которое также соединено с предохранительным выключателем для обнаружения приведения его в действие. Тормозное устройство останавливает серводвигатель после заданного периода времени от момента обнаружения приведения в действие предохранительного выключателя.
В соответствии с одним примером выполнения упомянутой системы, заданным периодом времени является временной период, который больше временного периода, требуемого для программируемого блока управления и сервоусилителя, чтобы затормозить серводвигатель при обычных условиях торможения. Такой заданный период времени может быть получен, если программируемый блок управления и сервоусилитель обладают способностью останавливать серводвигатель в течение, времени, которое меньше чем время, требуемое для тормозного устройства, чтобы остановить серводвигатель, и, кроме того, если они могут одновременно затормозить все серводвигатели, используемые в системе.
Другие цели и преимущества настоящего изобретения станут более очевидны из следующего ниже его подробного описания, которое ведется со ссылками на прилагаемые чертежи.
На фиг. 1 показана блок-схема известной системы управления серводвигателем.
На фиг. 2 - блок-схема системы управления серводвигателем, содержащей схему торможения с выдержкой времени.
На фиг. 3 - временная диаграмма, иллюстрирующая работу системы управления серводвигателем, показанной на фиг. 2, в которой заданный период времени больше временного периода, требуемого для программируемого блока управления и сервоусилителя, чтобы затормозить серводвигатель при обычных условиях торможения.
На фиг. 4 - принципиальная схема одного примера выполнения системы управления серводвигателем, показанной на фиг. 2, во время выполнения профиля движения с помощью серводвигателя.
На фиг. 5 - принципиальная схема одного примера выполнения системы управления серводвигателем, показанной на фиг. 2, во время выполнения схемой торможения с выдержкой времени последовательности торможения, чтобы остановить движение серводвигателя.
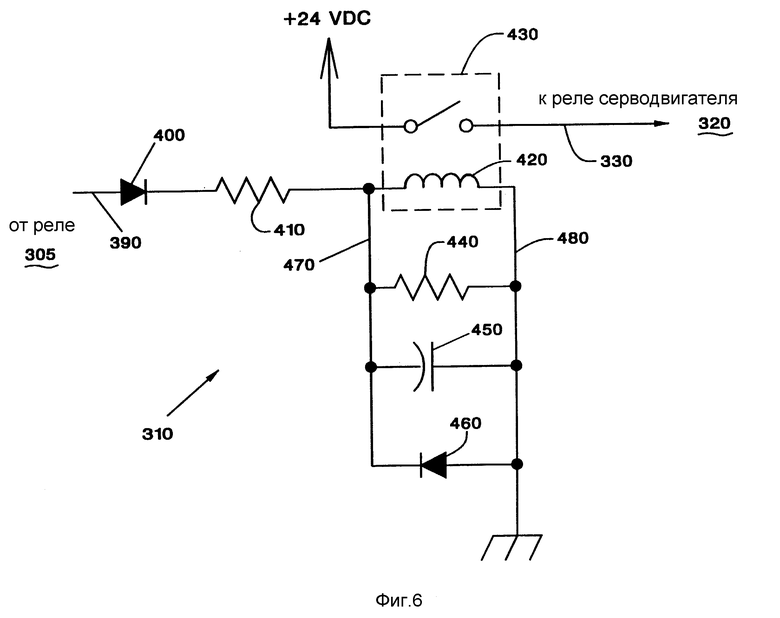
На фиг. 6 - принципиальная схема одного примера выполнения цепи задержки сервотаймера, показанной на фиг. 3 и 4.
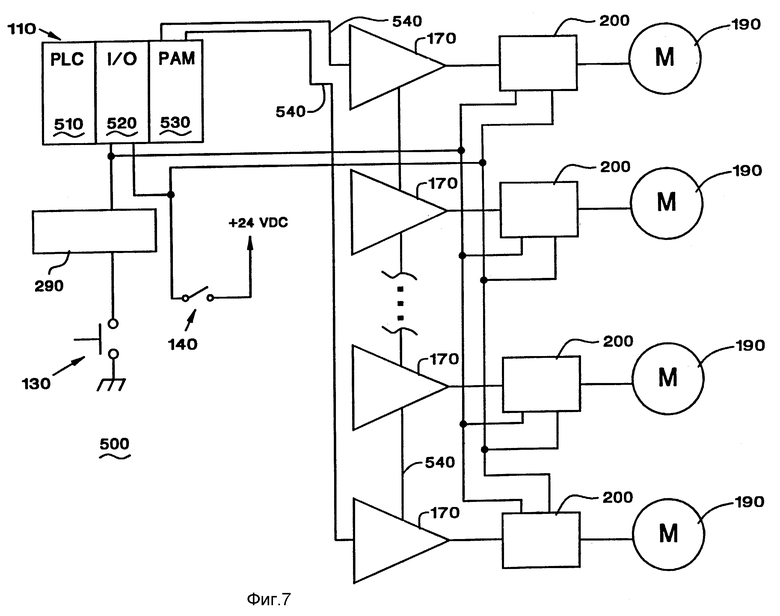
На фиг. 7 - блок-схема другого примера выполнения системы управления серводвигателем, в которой используется несколько серводвигателей.
На фиг. 2 показана система управления серводвигателем, обозначенная позицией 100. Как показано, система управления серводвигателем 100 содержит программируемый блок управления 110. Программируемый блок управления 110 принимает входной пусковой сигнал, подаваемый к нему по одной или более линиям 120. Пусковой сигнал может указывать, например, на приведение в действие пускового выключателя 130, имеющего первую клемму, соединенную с программируемым блоком управления 110, и вторую клемму, заземленную на массу. Программируемый блок управления 110 принимает также сигнал аварийной остановки, который указывает например, на приведение в действие аварийного выключателя остановки 140, имеющего первую клемму 150, соединенную с программируемым блоком управления 110, и вторую клемму 160, заземленную на массу.
Как показано, программируемый блок управления 110 через одну или более линий 180 соединен с сервоусилителем 170 для управления им. Сервоусилитель 170 реагирует на командные сигналы, вырабатываемые программируемым блоком управления 110 и подаваемые по линии 180, и увеличивает электрическую мощность, необходимую для вращения серводвигателя 190, в соответствии с принятыми командными сигналами.
Между сервоусилителем 170 и серводвигателем 190 расположена схема торможения с выдержкой времени 200. На схему торможения с выдержкой времени 200 подается по одной или более линиям 210 сигнал аварийной остановки, который вырабатывает, например, аварийный выключатель остановки 140. Схема торможения с выдержкой времени 200 соединена с сервоусилителем 170 через одну или более линий 220 и с серводвигаталем 190 через одну или более линий 230.
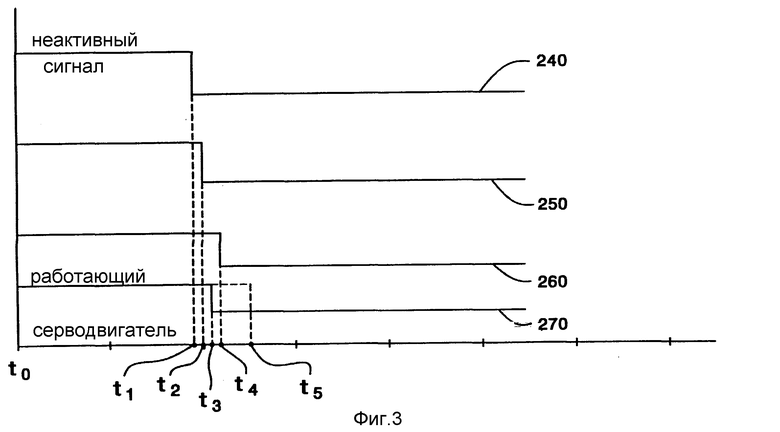
На фиг. 3 показана временная диаграмма, иллюстрирующая работу системы управления серводвигателем, показанную на фиг. 2. На этой временной диаграмме линия 240 иллюстрирует состояние сигнала аварийной остановки, линия 250 выполнение последовательности торможения с помощью программируемого блока управления 110, линия 260 выполнение последовательности торможения с помощью схемы торможения с выдержкой времени 200 и линия 270 - состояние серводвигателя 190.
Во время обычной работы системы управления серводвигателем 100, показанной на диаграмме между временем t0 и t1, серводвигатель 190 выполняет профиль движения в соответствии с командными сигналами, которые принимает сервоусилитель 170 от программируемого блока управления 110. При этом ни программируемый блок управления 110 ни схема торможения с выдержкой времени 200 не инициируют выполнение последовательности торможения, для остановки движения серводвигателя 190.
Во время t1 подается сигнал аварийной остановки, указывающий на то, что необходимо прекратить дальнейшее вращение серводвигателя 190. Сигналом аварийной остановки может быть, например, сигнал, который фиксируется в активном состоянии при нажатии на аварийный выключатель остановки 140. Как вариант, или дополнительно, сигнал аварийной остановки может подаваться, например, при открывании двери упаковочной машины, использующей систему управления серводвигателем 100, вследствие чего может возникнуть опасность нанесения ущерба находящимся поблизости людям при дальнейшей работе серводвигателя 190. Может быть использовано любое число выключающих и/или сигнальных конфигураций для вырабатывания сигнала аварийной остановки.
Программируемый блок управления 110 и схема торможения с выдержкой времени 200 принимают сигнал аварийной остановки 240 во время t1. При нормальной работе системы управления серводвигателем 100 программируемый блок управления 110 начинает выполнять последовательность торможения во время t2, чтобы остановить серводвигатель 190. Эта последовательность торможения продолжается до времени t3, при котором серводвигатель 190 останавливается.
При ненормальных условиях работы системы управления серводвигателем 100 программируемый блок управления 110 и/или сервоусилитель 170 не будут способны выполнять нормальную последовательность торможения. Поэтому последовательность торможения начинает выполнять схема торможения 200. Эта последовательность торможения начинается во время t4 и продолжается до времени t5, при котором серводвигатель 190 останавливается.
На иллюстрируемой временной диаграмме временной период между t2 и t3 меньше, чем временной период между t4 и t5. Такой временной период характеризует тот факт, что во многих случаях торможение с помощью программируемого блока управления 110 и сервоусилителя 170 является более эффективным по времени, чем это могло бы быть достигнуто посредством торможения серводвигателя 190 с помощью схемы торможения с выдержкой времени 200, и, кроме того, позволяет одновременно тормозить несколько серводвигателей. По существу, схема торможения с выдержкой времени 200 начинает выполнять последовательность торможения через заданный период времени, показанный на временной диаграмме как t1 - t4, после обнаружения активного сигнала аварийной остановки. Этот период задержки предотвращает выполнение последовательности торможения с помощью схемы торможения 200 до тех пор, пока не пройдет достаточно времени, за которое программируемый блок управления 110 и сервоусилитель 170 могли бы затормозить серводвигатель 190.
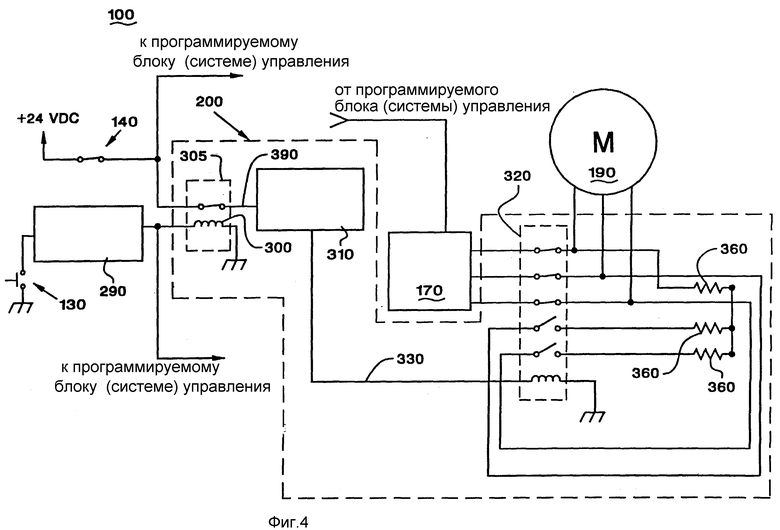
На фиг. 4 показан один пример выполнения системы управления серводвигателем 100, приведенной на фиг. 2. В соответствии с этим примером, пусковой выключатель 130 соединен со входом релейной схемы с самоблокировкой 290, которая в свою очередь соединена с обмоткой возбуждения 300 реле 305 и со входом программируемого блока управления 110. Аварийный выключатель остановки 140 имеет первую клемму, соединенную с источником питания (на фиг. 4 показан как постоянное напряжение +24 В) и вторую клемму, соединенную со входом реле 305. Аварийный выключатель остановки 140 показан в неактивном состоянии, в то время как реле 305 показано в возбужденном состоянии, в которой оно приводится с помощью пускового выключателя 130 и релейной схеме с самоблокировкой 290. В этом состоянии аварийного выключателя остановки напряжения (+24 В) подается через его вторую клемму и реле 305 на вход цепи задержки сервотаймера 310. Выход цепи задержки сервотаймера 310 через линию 330 соединен с обмоткой возбуждения реле 320 серводвигателя.
Реле 320 на фиг. 4 показано в рабочем (возбужденном) состоянии. В этом состоянии оно напрямую соединяет выходы сервоусилителя 170 с серводвигателем 190. Такое прямое соединение позволяет серводвигателю 190 выполнять профиль движения под управлением сервоусилителя 170, который в свою очередь управляет профилем движения в соответствии с командными сигналами, принимаемыми от программируемого блока управления 110.
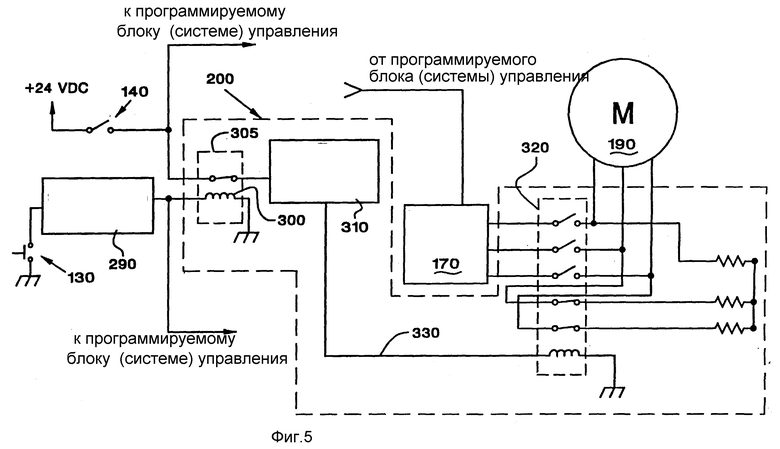
На фиг. 5 показана система управления серводвигателем 100 после приведения в действие аварийного выключателя остановки 140. Как показано, при срабатывании аварийного выключателя остановки 140 напряжение на его первой клемме не подается на вход реле 305. Цепь задержки сервотаймера 310 обнаруживает такое срабатывание аварийного выключателя остановки 140 и после заданного периода времени переводит реле 320 серводвигателя в нерабочее состояние. В этом состоянии реле 320 отсоединяет сервоусилитель 170 от серводвигателя 190. При резком отключении серводвигателя 190 может произойти его повреждение и/или он может продолжать работать в течение некоторого периода времени после его отключения. Поэтому входы серводвигателя 190 соединяются через его реле 320 с несколькими тормозными резисторами 360. При анализе вышеописанной схемы легко понять, что цепь задержки сервотаймера 310 также будет отсоединять сервоусилитель 170 от серводвигателя 190, если пусковой выключатель 130 не был приведен в действие, чтобы запитать обмотку 300 реле 305.
На фиг. 6 показан один пример выполнения цепи задержки сервотаймера 310. Как показано, вход цепи 310 соединен с выходом реле 305 через линию 390. Входной сигнал подается через последовательно соединенные диод 400 и резистор 410 на обмотку 420 реле 430. Резистор 440, конденсатор 450 и диод 460 параллельно соединены с обмоткой 420 реле 430 и функционируют как RС-таймер (резистивно-емкостной таймер). Первая сторона 470 параллельного соединения соединена с резистором 410, в то время как вторая сторона 480 параллельного соединения заземлена на массу. На первый вывод реле 430 подается напряжение, например, постоянное напряжение +24 В) в то время как второй вывод реле 430 соединен с обмоткой реле 320 серводвигателя 190.
Когда аварийный выключатель остановки 140 находится в нерабочем состоянии, т.е. не приведен в действие, а обмотка реле 305 возбуждена, напряжение подается на вход диода 400, вследствие чего обмотка 420 реле 430 возбуждается, так что напряжение по линии 330 подается на обмотку реле 320 серводвигателя 190. Когда же аварийный выключатель остановки 140 приводится в действие, вход диода 400 становится дифференциальным (незаземленным). В этот момент конденсатор 450 параллельного соединения поддерживает обмотку 420 в возбужденном состоянии в течение заданного периода времени. По истечении заданного периода времени конденсатор 450 полностью разряжается, так что он больше неспособен возбуждать обмотку 420 и реле 430 выключается. Как только реле 430 выключается, прекращается возбуждение обмотки реле 320, вследствие чего сервоусилитель 170 отсоединяется от серводвигателя 190 и последний соединяется с тормозными резисторами 360.
На фиг. 7 показано применение схемы торможения с выдержкой времени 200 в системе управления 500, использующей несколько сервоусилителей 170 и серводвигателей 190. В показанном примере выполнения, программируемый блок управления 110 включает в себя программируемый логический контроллер (ПЛК) 510, интерфейс ввода-вывода 520 для использования c ПЛК 510 и программируемое осевое устройство управления (ПОУУ) 530. ПЛК 510, интерфейс ввода-вывода 520 и ПОУУ 530 могут быть соединены между собой посредством VME шины.
Программируемый блок управления 110 может быть выполнен в соответствии с принципами изобретения по заявке на патент США N 08/315.414 (Досье патентного поверенного N 10623 US01, корпоративное досье N TRX-0126) под названием "Система управления для упаковочной машины", которая включена в данную заявку в качестве ссылки. В качестве ПЛК 510 может быть использован программируемый логический контроллер модели 9070, производимый фирмой GE Фэнак (GE Fanuc), а в качестве ПОУУ 530 - программируемое осевое устройство управления, производимое фирмой Сокапел (Socopel).
ПОУУ 530 управляет сервоусилителями 170 через одну или более линий 540, которые образуют, например, оптическую кольцевую сеть. Между каждым сервоусилителем 170 и соответствующим серводвигателем 190 расположена схема торможения с выдержкой времени 200. Каждая схема торможения с выдержкой времени 200 соединена с выходом релейной схемы с самоблокировкой 290 и аварийным выключателем остановки 140. В качестве сервоусилителей 170 могут быть использованы, например, сервоусилители модели SТ-1, производимые фирмой Сокапел.
При работе приведение в действие аварийного выключателя остановки 140 обнаруживается с помощью ПЛК 510 через интерфейс ввода-вывода 520. Затем ПЛК 510 подает командные сигналы на ПОУУ 530, чтобы затормозить серводвигатели 190 через сервоусилители 170. ПОУУ 530 вырабатывает требуемые сигналы торможения, которые подаются на сервоусилители через оптическую кольцевую сеть, чтобы затормозить серводвигатели 190. Как вариант, для обнаружения приведения в действие аварийного выключателя остановки он может быть соединен с интерфейсом ввода-вывода в одном из сервоусилителей 170. Схема торможения с выдержкой времени 200 работает в соответствии с ранее описанной последовательностью торможения.
Хотя настоящее изобретение было описано со ссылкой на конкретные примеры его осуществления, специалистам в данной области техники понятно, что в него могут быть внесены различные изменения, не выходящие за пределы существа и объема изобретения, определенного в прилагаемой формуле изобретения.
Изобретение относится к системе управления серводвигателем. Технический результат изобретения заключается в том, что система управления серводвигателем разрешает проблему, связанную с отключением серводвигателя во время повреждения программируемого блока управления или сервоусилителя. Система управления сервоусилителем содержит программируемый блок управления, который вырабатывает один или более сигналов, подаваемых на сервоусилитель. Программируемый блок управления соединен с предохранительным выключателем для обнаружения приведения последнего в действие и управляет сервоусилителем, чтобы затормозить серводвигатель, при обнаружении приведения в действие предохранительного выключателя. Между сервоусилителем и серводвигателем расположена схема торможения с выдержкой времени. Схема торможения с выдержкой времени также соединена с предохранительным выключателем для обнаружения приведения его в действие и срабатывает, чтобы затормозить серводвигатель, после заданного периода времени с момента обнаружения приведения в действие предохранительного выключателя. 4 з.п.ф-лы, 7 ил.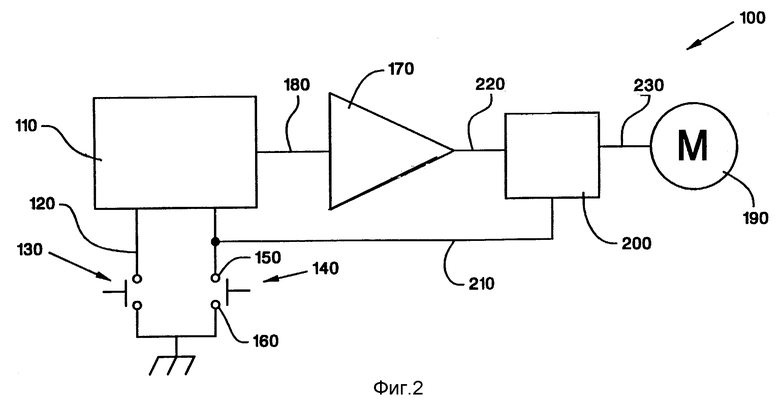
| US 5177930 А, 12.01.93 | |||
| US 4494199 А, 15.01.85 | |||
| US 4250440 А, 10.02.81 | |||
| US 4065074 А, 27.12.77 | |||
| Программное устройство для управления перемещением исполнительного механизма | 1976 |
|
SU675402A2 |
| Устройство для защиты систем автоматического управления | 1987 |
|
SU1522149A1 |
