Настоящее изобретение относится к спасательным средствам, используемым для разборки завалов и перемещения обломков разрушенных сооружений и конструкций при спасении людей в зонах техногенных и природных катастроф.
Известен трубоукладчик, который может быть использован в качестве аварийно-спасательной машины для разборки завалов и перемещения обломков разрушенных сооружений и конструкций при спасении людей. Он содержит шасси с рамой, крановую стрелу, шарнирно соединенную с ней поддерживающую опору регулируемой длины со штангой ее фиксации, причем поддерживающая опора шарнирно соединена с рамой посредством упомянутой штанги с образованием вместе со штангой, стрелой и рамой параллелограммного механизма, при этом штанга выполнена регулируемой длины (см. авторское свидетельство SU N 1039860, B 66 C 23/36, опубликованное в Бюллетене изобретений N 33 от 07.09.1983 г.).
Однако, использование такого известного устройства в чрезвычайных ситуациях ограничено из-за малых размеров его рабочей зоны, которая определяется размерами крановой стрелы, способной совершать только качательные движения в вертикальной плоскости. Кроме того, способность трубоукладчика перемещать обломки разрушенных сооружений и конструкций зависит от возможностей его шасси передвигаться по местности, что в большинстве аварийных ситуаций бывает невозможно осуществить.
Известны грузоподъемные краны, в том числе на самоходном шасси, которые могут быть использованы в качестве аварийно- спасательной машины. Они содержат стрелу, способную совершать качательные движения в вертикальной плоскости и поворачиваться в горизонтальной плоскости вместе с поворотной платформой. Кроме того возможно использование поддерживающей опоры (См. Подъем и перемещение грузов. По ред. 3. Б. Хараса М.: Стройиздат, 1987 (Справочник строителя) с. 75-197).
Однако, такие известные машины трудно и опасно использовать для разборки завалов в районах аварий, т.к. строповка обломков-грузов неправильной формы чрезвычайно затруднена и сопряжена с пребыванием рабочего-строполя в непосредственной близость к разрушенному объекту.
Известен экскаватор, изготавливаемый АО "Тверской экскаваторный завод", АО "Компания Промтехника", который может быть использован как аварийно-спасательная машина для разборки завалов в районах аварий со сложным рельефом местности. Он содержит шасси с поворотной платформой, на которой установлена качающаяся стрела с приводным гидроцилиндром, и рабочий орган в виде ковша, шарнирно соединенный с концом рукояти (См. проспект АО "Тверской экскаваторный завод", АО "Компания Промтехника", представляемый на выставке "Средства Спасения-95", проходившей с 5.09.95г. по 10.09.95 г, в г. Москве Приложение N1).
Эта машина имеет увеличенную рабочую зону, в частности за счет возможности опускания ковша на глубину 4 м на расстоянии до 15 м, что отсутствовало в предыдущих известных машинах.
Однако и такая машина не может быть использована с большой эффективностью для разборки завалов, так как в ее наборе сменных рабочих органов отсутствует универсальный захват с несколькими степенями подвижности, что характерно для манипуляционного оборудования, наилучшим образом соответствующего назначению аварийно- спасательной машины, а также из-за ограниченной плоскостью качания стрелы рабочей зоны.
В качестве прототипа выбран известный лесопогрузчик фирмы "ВАЛМЕТ", который может быть использован в качестве аварийно-спасательной машины для разборки завалов в районах аварий и имеет наибольшее число общих признаков с заявляемым изобретением.
Он содержит шасси со стрелой, которая шарнирно соединена с поворотной стойкой, приводные гидроцилиндры, из которых одни взаимодействуют со стрелой, а другие - с поворотной стойкой и установлены на шасси, а также захват с основанием в виде поворотной плиты, которая шарнирно соединена с концом стрелы, причем при транспортном положении стрелы упомянутые гидроцилиндры имеют минимальную свою длину, при этом приводной гидроцилиндр стрелы, стрела, поворотная стойка и шасси соединены шарнирно, образуя четырехзвенный механизм (См. Проспект "ВАЛМЕТ" Лесопогрузчик, 1510, 1982, Приложение 2).
Этот известный лесопогрузчик способен опускать захват ниже уровня стоянки шасси за счет разворота основания захвата.
Однако, и прототип не может быть эффективно использован для разборки завалов в районах аварий, имеющих сложный рельеф местности, поскольку для захвата объекта манипулирования лесопогрузчик "ВАЛМЕТ", как любой фронтальный погрузчик, должен подъехать вплотную к объекту, причем захват объекта возможен только в плоскости качания стрелы.
Анализ известного научно-технического уровня показывает, что для разборки завалов и перемещения обломков технологического оборудования, зданий, транспортных средств и других инженерных сооружений и конструкций в районе аварий могут применяться различные машины: подъемные краны, лесопогрузчики, экскаваторы, трубоукладчики, способные поднимать и перемещать груз. Однако, если они имеют узкую специализацию, обусловленную конструкцией рабочего органа: ковша, захвата, крюка и ограниченную по размерам и грузоподъемности рабочую зону, причем расширение рабочей зоны у таких машин путем традиционных технических решений, например, увеличением вылета стрелы вступает в противоречие с обеспечением их устойчивости от опрокидывания и приводит к увеличению габаритов и массы шасси, а повышение грузоподъемности стрелы посредством применения поддерживающей опоры под стрелой вступает в противоречие с обеспечением маневренности машины в районе аварии, особенно в месте непосредственного завала.
Задачей настоящего изобретения является создание новой аварийно-спасательной машины, обладающей большой рабочей зоной и высокой грузоподъемностью на максимальном вылете стрелы при одновременной маневренности и способности работать в районах аварий со сложным рельефом местности, имеющей возвышенности, впадины, узкие проходы, а также с сохранением компактности в транспортном положении.
Поставленная задача решена тем, что в известной аварийно-спасательной машине, содержащей шасси, поворотную стойку, на которой шарнирно закреплена стрела, приводные гидроцилиндры, из которых одни взаимодействуют со стрелой, а другие - с поворотной стойкой, согласно настоящему изобретению, введены поворотная платформа, которая установлена на шасси, складывающаяся поддерживающая опора с ходовым устройством и манипулятор с основанием, которое установлено на этой опоре и соединено с концом стрелы посредством стабилизатора, обеспечивающего плоскопараллельное перемещение манипулятора в рабочей зоне, а поворотная стойка и приводные гидроциллндры шарнирно соединены с поворотной платформой, причем, основание манипулятора соединено шарнирно со стабилизатором с возможностью поворота в плоскости, перпендикулярной плоскости качания стрелы.
Возможно, что стрела выполнена телескопической и при транспортном положении ее приводной гидроцилиндр имеет длину больше минимальной своей длины, но меньше - максимальной.
Возможно, что в качестве складывающейся поддерживающей опоры с ходовым устройством применено шагающее опорное устройство.
Может быть, что шагающее опорное устройство выполнено в виде двуногого механизма.
Так же, может быть, что двуногий механизм соединен с основанием манипулятора, которое соединено со стабилизатором посредством двух шарнирных управляемых разъемных соединений, расположенных на торцевой части стабилизатора, причем расстояние между продольными осями ног упомянутого механизма равно расстоянию между осями указанных двух шарнирных управляемых разъемных соединений.
Такое новое техническое решение всей своей новой совокупностью существенных признаков позволяет создать аварийно- спасательную машину, которая имеет большую рабочую зону, развивает максимальную грузоподъемность во всей рабочей зоне и может выполнять спасательные работы на местности со сложным рельефом в условиях нагромождения обломков разрушенных сооружений.
Это достигается за счет того, что манипулятор с опорой смонтирован на конце стрелы и благодаря наличию поддерживающей опоры с ходовым устройством может занять устойчивое положение и перемещаться по местности одновременно с поворотом стрелы и поворотной платформы, перемещая оперативно захваченный обломок сооружения или конструкции в стороны от завала, освобождая доступ к пострадавшим от аварии.
Кроме того, наличие стрелы, выполненной телескопической, и ее приводного гидроцилиндра, который имеет длину больше минимальной своей длины, но меньше максимальной при транспортном положении стрелы, позволяет наклонять стрелу глубоко вниз, опуская манипулятор с поддерживающей опорой и ходовым устройством на дно котлована, трещины, оврага и располагая его там в устойчивом положении.
Анализ научно-технической и патентной информации, произведенный авторами и заявителем, а также сравнение с прототипом показывает, что предлагаемое изобретение новое, т.к. авторам и заявителю неизвестна заявляемая совокупность существенных отличительных признаков.
Однако отдельные отличительные признаки известны, но с другой совокупностью существенных признаков. Например, для повышения устойчивости подъемного крана применяют поддерживающую опору, которую подставляют под конец стрелы (См. аналоги). В нашем случае это свойство опоры сохранено, но ей приданы и другие, а именно: перемещать груз, захваченный манипулятором в сторону от завала, и быть транспортабельной самой стрелой, что, кстати, отсутствует у известных опор, располагаемых на конце стрелы.
Известно, что в подъемных кранах используется телескопическая стрела. Конструкция указанной стрелы позволяет увеличить рабочую зону, проигрывая в грузоподъемности.
В нашем случае телескопическая стрела используется как средство доставки манипулятора с основанием, которое установлено на поддерживающей опоре с ходовым устройством, к объекту манипулирования, т.е. свойство транспортировщика и грузоподъемника одновременно.
Таким образом, настоящее изобретение отвечает критерию "изобретательский уровень", так как оно объединило альтернативные технические машины, взяв от них только положительные свойства, исключив отрицательные, с которыми положительные свойства находились в противоречии.
Промышленное применение настоящего изобретения обосновывается чертежом и ниже приведенным описанием изобретения.
Сущность настоящего изобретения поясняется чертежами, где:
фиг. 1 - аварийно-спасательная машина в транспортном положении;
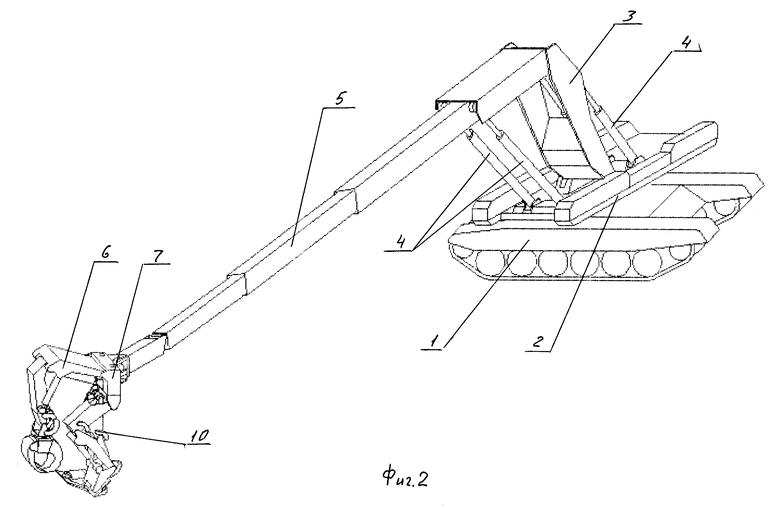
фиг. 2 - основные рабочие положения аварийно-спасательной машины;
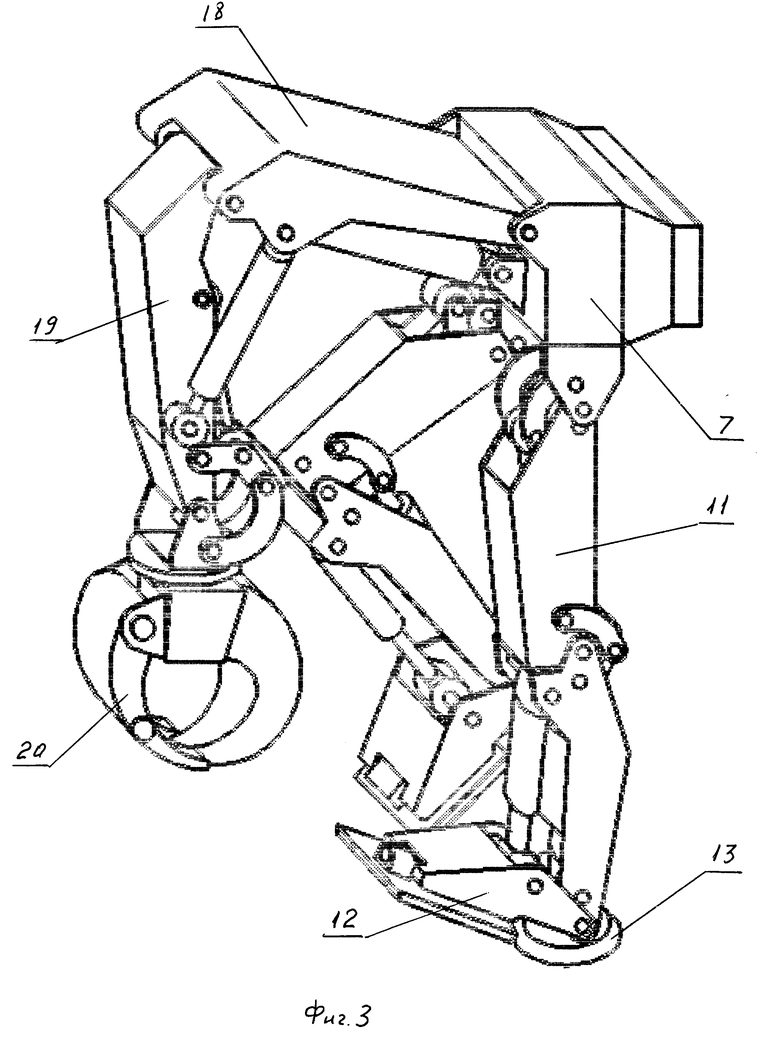
фиг. 3 - вид сбоку на манипулятор с основанием, установленным на складывающейся поддерживающей опоре с ходовым устройством, например, в виде двуногого механизма;
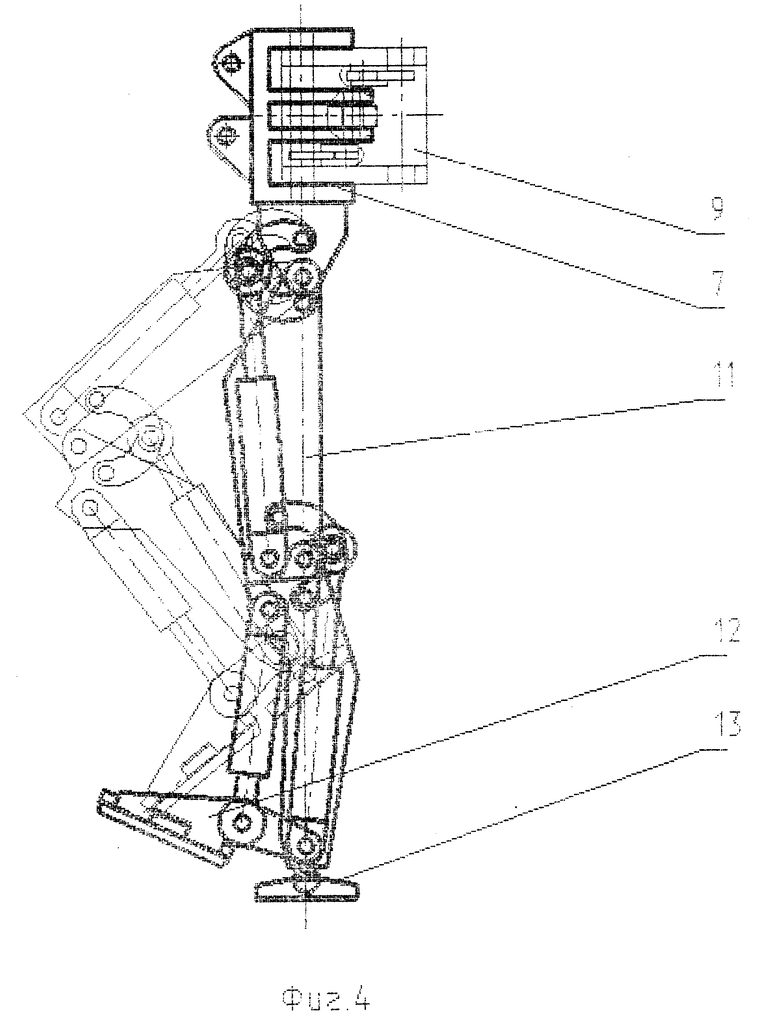
фиг. 4 - вид сбоку на двуногий механизм при развороте на пяте одной из ног;
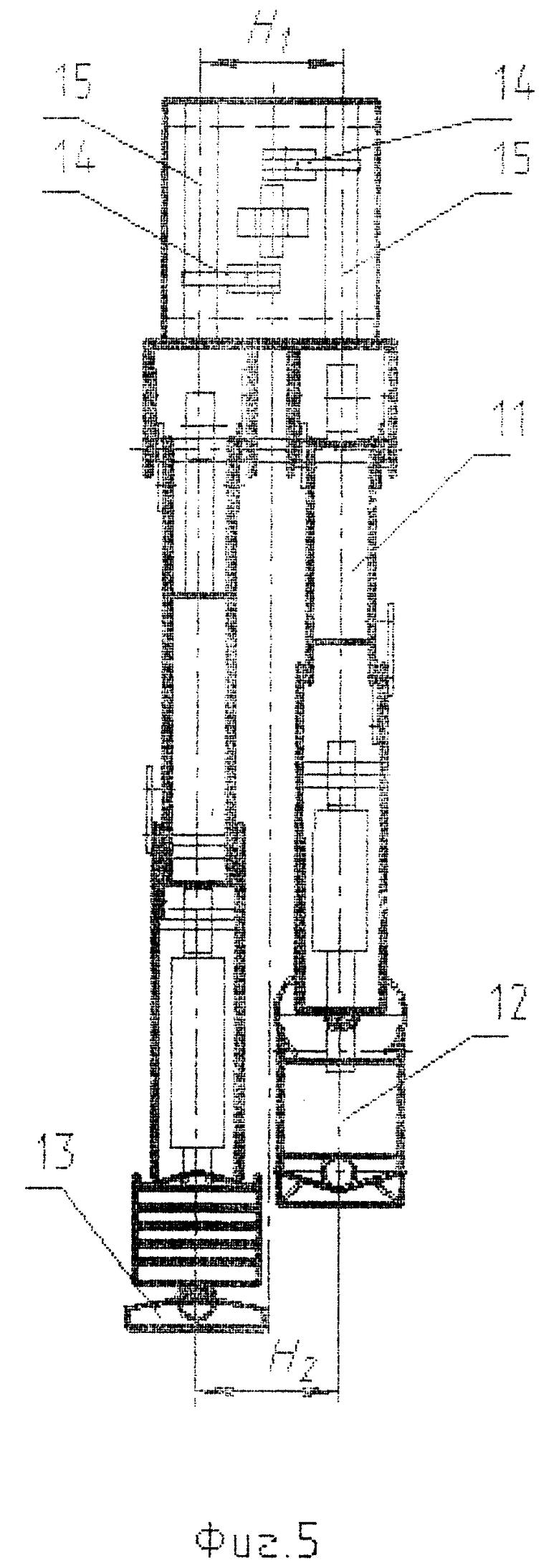
фиг. 5 - вид спереди на двуногий механизм по фиг.4;
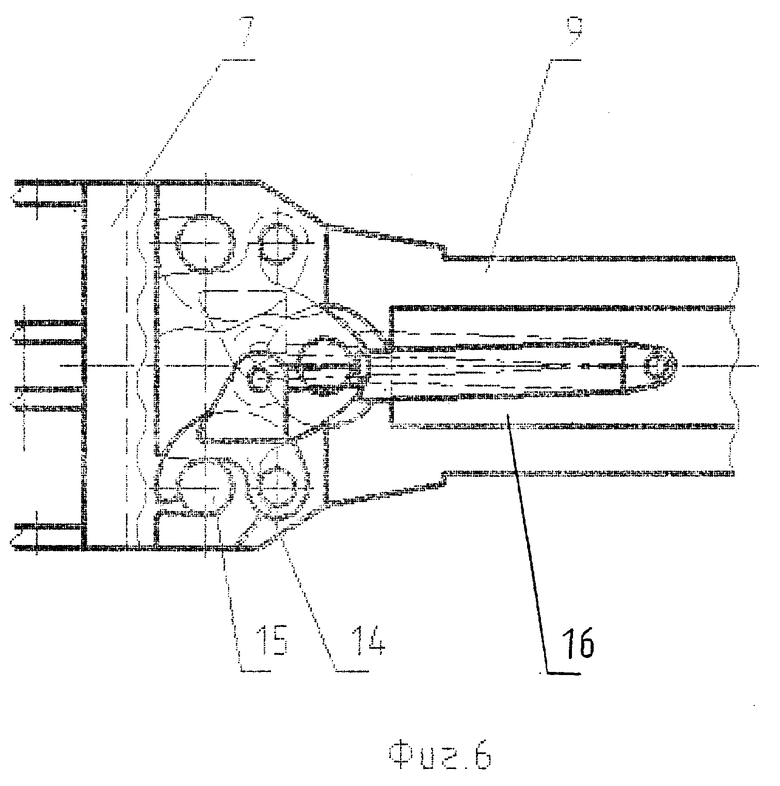
фиг. 6 - вид сверху на основание манипулятора, присоединенного к стабилизатору;
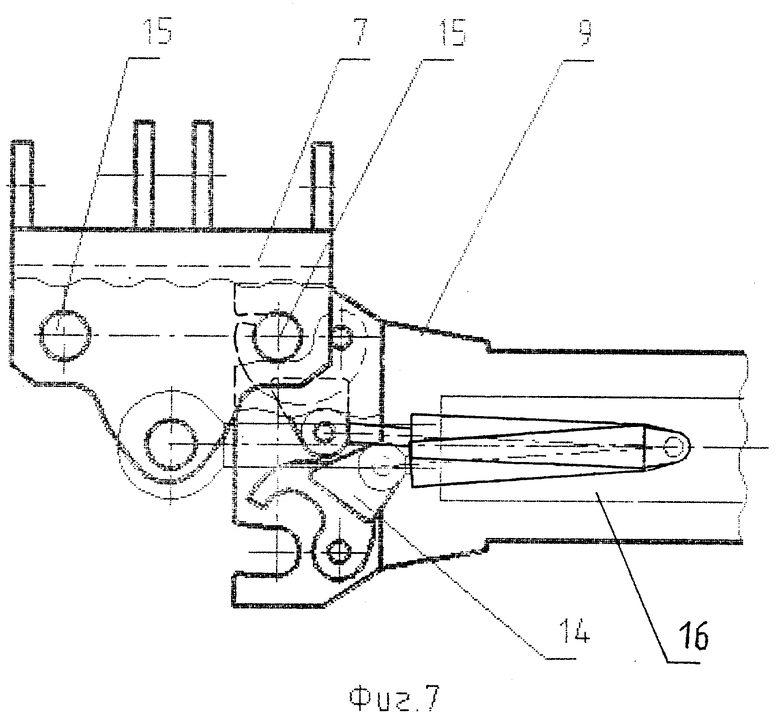
фиг. 7 - вид сверху на основание манипулятора, повернутое вокруг шарнирного управляемого разъемного соединения со стабилизатором;
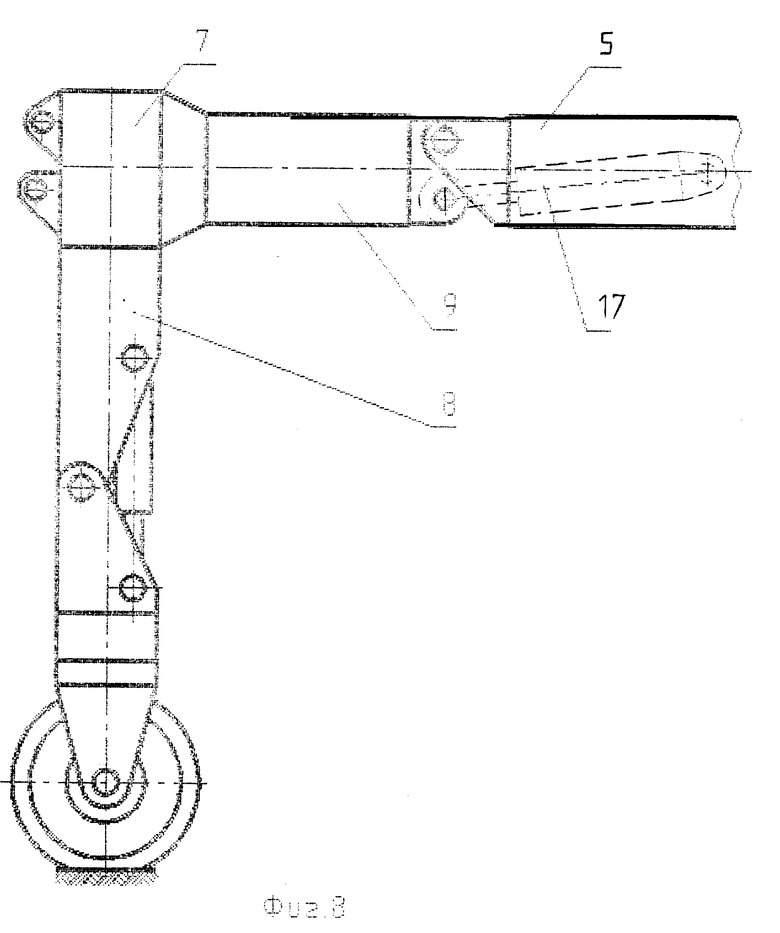
фиг. 8 - вид возможного варианта складывающейся поддерживающей опоры с ходовым устройством.
Предлагаемая аварийно-спасательная машина содержит шасси 1, например, либо гусеничное, либо пневмоколесное (фиг.1,2), на котором установлена поворотная платформа 2.
На поворотной платформе 2 шарнирно закреплены поворотная стойка 3 и приводные гидроцилиндры 4. Конец поворотной стойки 3 шарнирно соединен со стрелой 5, выполненной телескопической и с одним из приводных гидроцилиндров 4. Другой приводной гидроцилиндр 4 шарнирно соединен со стрелой 5 и при транспортном положении последней имеет длину большую минимальной своей длины, но меньшую - максимальной, то есть он имеет "Δ" - запас рабочего хода, позволяющий опустить конец телескопической стрелы ниже уровня стоянки шасси.
Причем, этот приводной гидроцилиндр 4 вместе со стрелой 5, поворотной стойкой 3 и поворотной платформой 2 образует четырехзвенный механизм, что позволяет включением приводного гидроцилиндра поворотной стойки изменять угол между поворотной стойкой и стрелой при переводе рабочего оборудования машины из транспортного положения в рабочее, не расходуя на указанную операцию запас хода приводного гидроцилиндра стрелы.
На конце стрелы 5 расположен манипулятор 6 с основанием 7, которое установлено на складывающейся поддерживающей опоре 8 с ходовым устройством, например, колесного типа (фиг. 1 и 8) и соединено с концом стрелы 5 посредством стабилизатора 9, обеспечивающего плоскопараллельное перемещение манипулятора 6 в рабочей зоне (фиг. 2). Причем, это основание 7 манипулятора шарнирно соединено со стабилизатором 9 с возможностью поворота в плоскости, перпендикулярной плоскости качания стрелы 5 (фиг. 6,7). Причем, в качестве складывающейся поддерживающей опоры с ходовым устройством может быть применено шагающее опорное устройство, например, в виде двуногого механизма 10 (фиг. 1, 2), имеющего две ноги 11 со стопами 12 и пятой 13 (фиг.3).
В этом случае, основание манипулятора 7 соединено со стабилизатором 9 посредством двух шарнирных управляемых разъемных соединений, активная часть которых - защелки 14, расположены на торцевой части стабилизатора 9, а пассивная часть - оси 15 закреплены в основании 7 (фиг. 6, 7).
Стабилизатор 9 представляет собой коробчатую металлоконструкцию, внутри которой размещен гидроцилиндр 16, предназначенный для поворота основания 7 относительно стабилизатора 9, и которая шарнирно соединена с концом стрелы 5 и с приводным гидроцилиндром 17, соединенным также шарнирно со стрелой 5 (фиг. 8.).
Благодаря стабилизатору 9 при любом положении стрелы 5 основание 7 манипулятора, содержащего плечевое звено 18, кистевое звено 19 и универсальный захват 20 (фиг.3), ориентировано относительно опорной поверхности под постоянным углом, что необходимо для нормальной работы манипулятора и шагающего опорного устройства машины.
Настоящая аварийно-спасательная машина работает следующим образом.
К месту проведения аварийно-спасательных работ машина доставляется своим ходом с помощью шасси 1 (фиг.1). В исходном (походном) положении телескопическая стрела 5 сложена, стойка 3 повернута в крайнее заднее положение, опорное (шагающее) устройство 10 сложено и опирается на лобовой лист шасси 1.
Для проведения работ манипулятор 6 с помощью поворотной платформы 2, поворотной стойки 3 и телескопической стрелы 5 перемещается к месту выполнения операции (фиг. 2), причем за счет исходного запаса рабочего хода "Δ" (фиг. 1), который имеет один из приводных гидроцилиндров 4, в исходном положении манипулятор 5 может быть перемещен выше или ниже уровня стоянки шасси (фиг. 2, изображены тонкими линиями).
Необходимое положение манипулятора 6 относительно объекта манипулирования осуществляется с помощью поворота основания 7, относительно стабилизатора 9, который в свою очередь может поворачиваться относительно телескопической стрелы 5 (фиг. 6, 7, 8).
За счет разворота стабилизатора 9 с помощью приводного гидроцилиндра 16 шагающее опорное устройство 10 ориентируется к опорной поверхности под необходимым углом. При этом манипулятору 6 обеспечивается стабилизатором 9 плоскопараллельное перемещение в рабочей зоне, гарантирующее ему устойчивое рабочее положение на любом рельефе поверхности рабочей зоны (фиг.2).
При необходимости поворота манипулятора 6 в плоскости, перпендикулярной плоскости качания стрелы 5, одна из защелок 14 (фиг.7) выводится из зацепления с соответствующей осью 15 и с помощью гидроцилиндра 16 основание манипулятора 7 разворачивается относительно стабилизатора 9 вокруг второй оси 15. Учитывая, что расстояние H1 между осями 15 равно расстоянию H2 между продольными осями ног 11 двуногого механизма (фиг. 5), то точка опоры манипулятора на грунт (центр пяты 13) лежит при повороте манипулятора на продолжении оси 15.
Значительное увеличение силовых параметров манипулятора обеспечивается за счет опорного шагающего устройства 10, обеспечивающего силовую разгрузку телескопической стрелы 5 от вертикальной составляющей усилия на захвате 19 (фиг. 3). Для этого ноги 11 с помощью своих приводных гидроцилиндров опираются на опорную поверхность в зоне проведения операций. Стопы 12 и пяты 13 обеспечивают необходимый контакт ног 11 с опорной поверхностью.
Универсальный захват 20 с помощью кистевого 19 и плечевого 18 звеньев перемещается к объекту проведения операций. Подъем груза может осуществляться как за счет поворота звеньев 18 и 19, так и за счет сгибания-разгибания ног 11.
Перемещение груза в зоне опорного устройства осуществляется с помощью разворота основания манипулятора 7, вокруг оси 15 (фиг. 5) и соответствующей пяты 13 с помощью приводного гидроцилиндра 16.
При этом, для обеспечения поворота, другая нога 11 приподнимается, а стопа 12 опорной ноги занимает приподнятое положение (фиг. 4).
При необходимости перемещения груза на более значительное расстояние, т. е. в пределах зоны обметания телескопической стрелы 5, используется шагающее устройство. За счет сгибания-разгибания ног 11 и стоп 12, шагающее устройство обеспечивает перемещение груза синхронно перемещениям телескопической стрелы 5, поворотной стойки 3 и разворотом платформы 2.
Описанное устройство аварийно-спасательной машины обеспечивает перемещение грузов и разрушение металлических и других конструкций с приложением усилий, не ограниченных условиями устойчивости шасси 1 во всем рабочем диапазоне действия телескопической стрелы 5.
Таким образом, предлагаемая аварийно- спасательная машина обладает высокой маневренностью, особенно при наличии шагающего опорного механизма; имеет большую грузоподъемность в любой точке рабочей зоны; обладает компактностью конструкции и способна перемещаться по поверхности с грузом, что в известных машинах невозможно осуществить.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2011 |
|
RU2476372C1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1993 |
|
RU2063375C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
| КОЛЕСНЫЙ ГИДРАВЛИЧЕСКИЙ ЭКСКАВАТОР | 2000 |
|
RU2185481C2 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1994 |
|
RU2089484C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2014 |
|
RU2581290C1 |
| Способ эвакуации аварийной машины и эвакуатор для его осуществления | 2022 |
|
RU2785376C1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
Изобретение относится к спасательным средствам, используемым для разборки завалов и перемещения обломков разрушенных сооружений в зонах катастроф. Сущность изобретения: аварийно-спасательная машина, содержащая шасси, поворотную стойку, на которой шарнирно закреплена стрела и приводные гидроцилиндры, из которых одни взаимодействуют со стрелой, а другие - с поворотной стойкой, снабжается поворотной платформой, которая установлена на шасси, складывающейся поддерживающей опорой с ходовым устройством, например, в виде двуногого шагающего механизма, и манипулятором с основанием, установленным на упомянутой опоре и соединенным с концом стрелы. 4 з.п. ф-лы, 8 ил.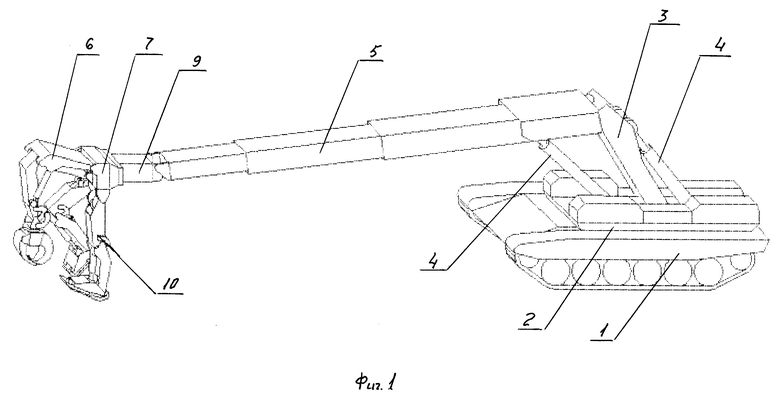
| Проспект фирмы "ВАЛМЕТ", Лесопогрузчик 1510, 1982. |
