Изобретение относится к машиностроению и может быть использовано в инерционно-импульсных передачах, вариаторах и других устройствах, где необходимо передавать крутящий момент только в одном направлении.
Известен храповой механизм свободного хода, содержащий храповое колесо, охватывающую его обойму, контактирующие с зубьями храпового колеса собачки, закрепленные на осях, замкнутый шарнирный многозвенник, расположенный между обоймой и храповым колесом, пружины, связывающие многозвенник с обоймой, две тяги, шарнирно соединенные с обоймой и соответствующими диаметрально противоположными шарнирами многозвенника.
К недостаткам данного устройства следует отнести сложность конструкции, так как механизм содержит большое количество подвижных звеньев и соединений. При работе механизма будут возникать колебания шарнирного многозвенника, нарушая правильную форму многоугольника. Наличие трения в многочисленных шарнирах приводит к неравномерности распределения нагрузки на собачки. Перечисленное выше, а также большое количество пружин, вдвое больше, чем у обычных механизмов свободного хода, отрицательно сказывается и на надежности механизма в целом (а.с. N 1439341, МКИ F 16 H 29/00).
Известен также механизм свободного хода, содержащий храповое колесо, взаимодействующую с ним при помощи упругого элемента собачку, размещенную в обойме и поджатую дополнительным упругим элементом. Собачка выполнена в виде нескольких пластин разной длины, а образованный ими ее рабочий профиль имеет ступенчатую форму.
Недостатком данного устройства является малый шаг храпового колеса, который отрицательно сказывается на надежности всего механизма, так как в процессе эксплуатации происходит выкрашивание и поломка зубьев храпового колеса (а. с. N 482585, МКИ F 16 D 29/00).
Наиболее близким по технической сущности к предлагаемому изобретению является храповой механизм свободного хода, содержащий концентрично расположенные обойму и звездочку, взаимодействующие через гибкие заклинивающие стержни, контактирующие одними концами со звездочкой и закрепленные другими концами в обойме. В обойме параллельно оси, по окружности, выполнены отверстия, соединенные с периферией обоймы сквозными радиальными пазами. Концы гибких заклинивающих стержней, закрепленные в обойме, выполнены в виде витых пружин, имеющих радиально отогнутые концы, и размещены в упомянутых отверстиях обоймы, а радиальные концы пружин установлены в упомянутых пазах.
К недостаткам данного устройства следует отнести неодновременное включение гибких заклинивающих стержней, вызванное технологическими причинами. Кроме того, малый шаг зубьев звездочки не позволит механизму передавать достаточно большой крутящий момент из-за недостаточной прочности зубьев звездочки, которые испытывают сложную деформацию от возникающих колебаний и других нагрузок (прототип, а.с. N 618588, МКИ F 16 D 41/07).
Предлагаемым изобретением решается задача -повышение нагрузочной способности и увеличение срока службы храпового механизма свободного хода.
Технический результат, получаемый при осуществлении изобретения, заключается в создании храпового механизма свободного хода, в котором зубья звездочки выполнены достаточно больших размеров при любом малом шаге всего механизма.
Указанный технический результат достигается тем, что в храповом механизме свободного хода, содержащем концентрично расположенные обойму и звездочку, взаимодействующие через гибкие заклинивающие стержни, контактирующие одними концами со звездочкой, а другими концами закрепленные в обойме, звездочка выполнена блоком из нескольких одинаковых дисков, жестко связанных между собой и смещенных относительно друг друга на угловой шаг, равный отношению углового шага храпового диска к количеству дисков, каждому храповому диску соответствует свой заклинивающий стержень пакета заклинивающих стержней, имеющих общую ось вращения, установленную в обойме, при наличии нескольких пакетов заклинивающих стержней они устанавливаются относительно друг друга с угловым шагом
где ϕ - угловой шаг механизма свободного хода с одним пакетом заклинивающих стержней в o,
m - количество пакетов заклинивающих стержней.
По сравнению с прототипом заявляемое техническое решение имеет следующие отличительные признаки:
- звездочка выполнена блоком из нескольких одинаковых дисков, жестко связанных между собой и смещенных относительно друг друга на угловой шаг, равный отношению углового шага храпового диска к количеству дисков;
- каждому храповому диску соответствует свой заклинивающий стержень из пакета заклинивающих стержней, имеющих общую ось вращения, установленную в обойме;
- при наличии нескольких пакетов заклинивающих стержней они устанавливаются относительно друг друга с угловым шагом
где ϕ - угловой шаг механизма свободного хода с одним пакетом заклинивающих стержней в o,
m - количество пакетов заклинивающих стержней.
Вышеизложенные признаки позволяют выполнить зубья звездочки достаточно больших размеров при любом малом шаге всего механизма, вследствие чего повышается нагрузочная способность и увеличивается срок службы храпового механизма.
Таким образом, предлагаемое техническое решение обладает "новизной" и "изобретательским уровнем".
Сущность изобретения поясняется чертежом, где на
фиг.1 - разрез Б-Б фиг. 2,
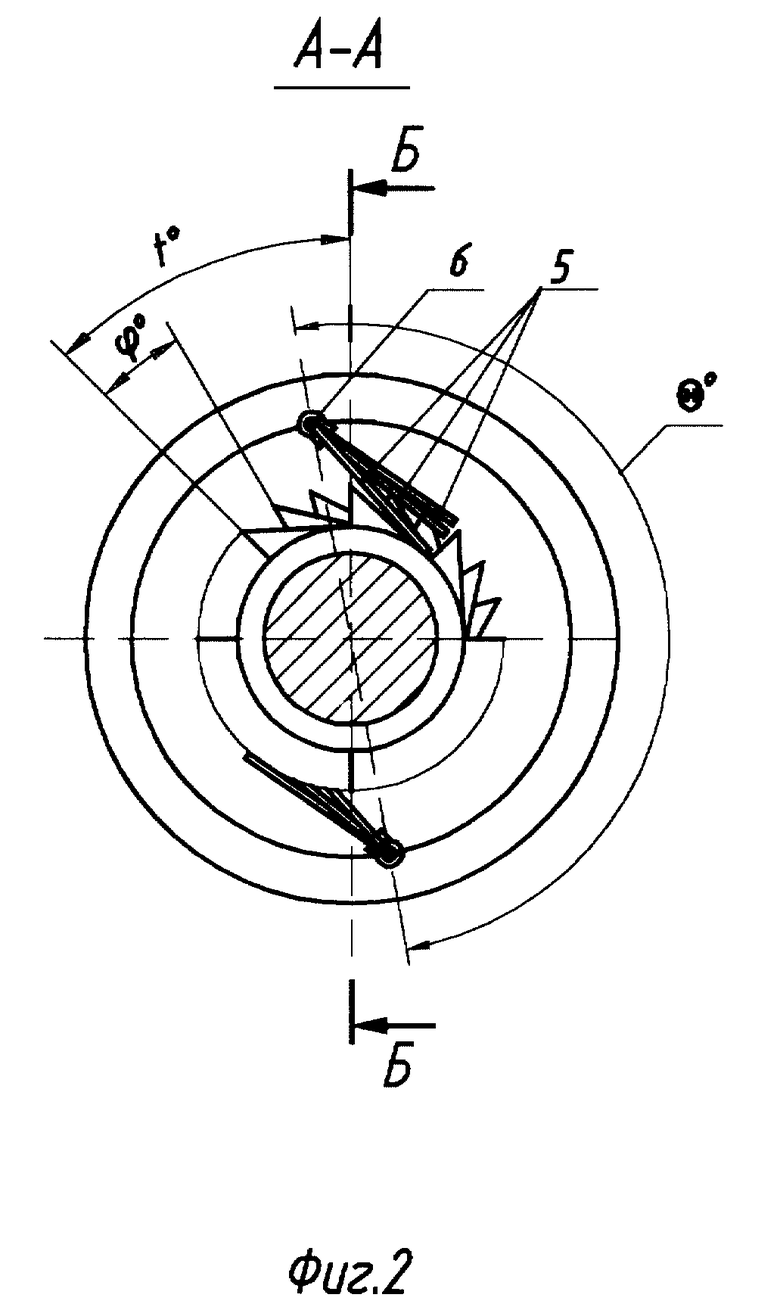
фиг. 2 - разрез А-А фиг. 1.
Храповой механизм свободного хода содержит корпус (обойму) 1, набор храповых дисков 2, жестко соединенных между собой в одно храповое колесо-звездочку, вал 3, поджимающие пружины 4, пакет гибких заклинивающих стержней 5, неподвижные концы которых шарнирно закреплены в обойме 1 на общей оси 6. Стержни 5 выполнены одинаковой длины в виде упругих пластин достаточной толщины и поджаты к зубьям храповых дисков 2 пружинами 4.
Зубья каждого храпового диска выполнены с угловым шагом
t = 360/Z,
где Z - число зубьев храпового диска.
Размеры зубьев выбираются из условия прочности, чтобы механизмом обеспечивалась передача заданного усилия (крутящего момента). Храповые диски жестко соединены между собой таким образом, что торец (начало) зуба последующего диска смещен относительно торца (начала) зуба предыдущего диска на величину углового шага:
t - угловой шаг храпового диска,
n - количество храповых дисков.
При установке на обойму нескольких пакетов упругих заклинивающих стержней между их осями вращения должен быть выдержан угол
где ϕ - угловой шаг механизма свободного хода с одним пакетом заклинивающих стержней,
m - количество пакетов упругих заклинивающих стержней. Общий угловой шаг всего механизма
S = 360/Znm,
где Z - число зубьев на храповом диске,
n - количество храповых дисков,
m - количество пакетов упругих заклинивающих стержней.
Варьируя m и n, при достаточно больших зубьях храповых дисков можно получить малый общий угловой шаг храпового механизма свободного хода.
Храповой механизм свободного хода работает следующим образом. При вращении вала 3 по часовой стрелке вместе с валом вращаются и храповые диски 2. По зубьям храповых дисков 2 скользят упругие стержни 5, которые поджимаются пружинами 4. Крутящий момент при этом механизмом не передается (фаза свободного хода).
При вращении вала 3 против часовой стрелки в зацепление с храповым зубом входит один из упругих стержней 5, торец которого ближе остальных расположен к поверхности зуба соответствующего ему храпового диска. При циклическом изменении направления вращения вала 3 заклинивание (стопорение) механизма осуществляется различными упругими заклинивающими стержнями 5.
Использование предлагаемого храпового механизма свободного хода для импульсных приводов стопорных устройств и т.д. позволяет получить долговечную конструкцию механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1997 |
|
RU2119601C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2005 |
|
RU2297559C1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ | 2003 |
|
RU2238459C1 |
| МОНТАЖНЫЙ КЛЮЧ | 2002 |
|
RU2232671C1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА С СИММЕТРИЧНЫМ ЗАЦЕПЛЕНИЕМ | 2004 |
|
RU2258845C1 |
| Храповой механизм свободного хода | 1989 |
|
SU1723389A1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1999 |
|
RU2170871C1 |
| ГАЕЧНЫЙ КЛЮЧ | 2000 |
|
RU2189304C2 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2001 |
|
RU2209356C2 |
| УСТАНОВКА ДЛЯ НАМОТКИ ЛЕНТЫ НА ОПРАВКУ | 2008 |
|
RU2399575C2 |
Механизм может быть использован в инерционно-импульсных передачах, вариаторах и других устройствах, в которых необходимо передавать крутящий момент только в одном направлении. Механизм содержит концентрично расположенные обойму и звездочку, взаимодействующие через гибкие заклинивающие стержни. Указанные стержни контактируют одними концами со звездочкой, а другими концами закреплены в обойме. Звездочка выполнена блоком из нескольких одинаковых дисков, жестко связанных между собой и смещенных относительно друг друга на угловой шаг, равный отношению углового шага храпового диска к количеству дисков. Каждому храповому диску соответствует свой заклинивающий стержень пакета стопорных стержней, имеющих общую ось вращения, установленную в обойме. Технический результат, достигаемый при реализации изобретения, заключаются в создании храпового механизма свободного хода, в котором зубья звездочки выполнены достаточно больших размеров при любом малом шаге всего механизма. Таким образом, обеспечивается повышение нагрузочной способности и увеличение срока службы храпового механизма свободного хода. 1 з.п.ф-лы, 2 ил.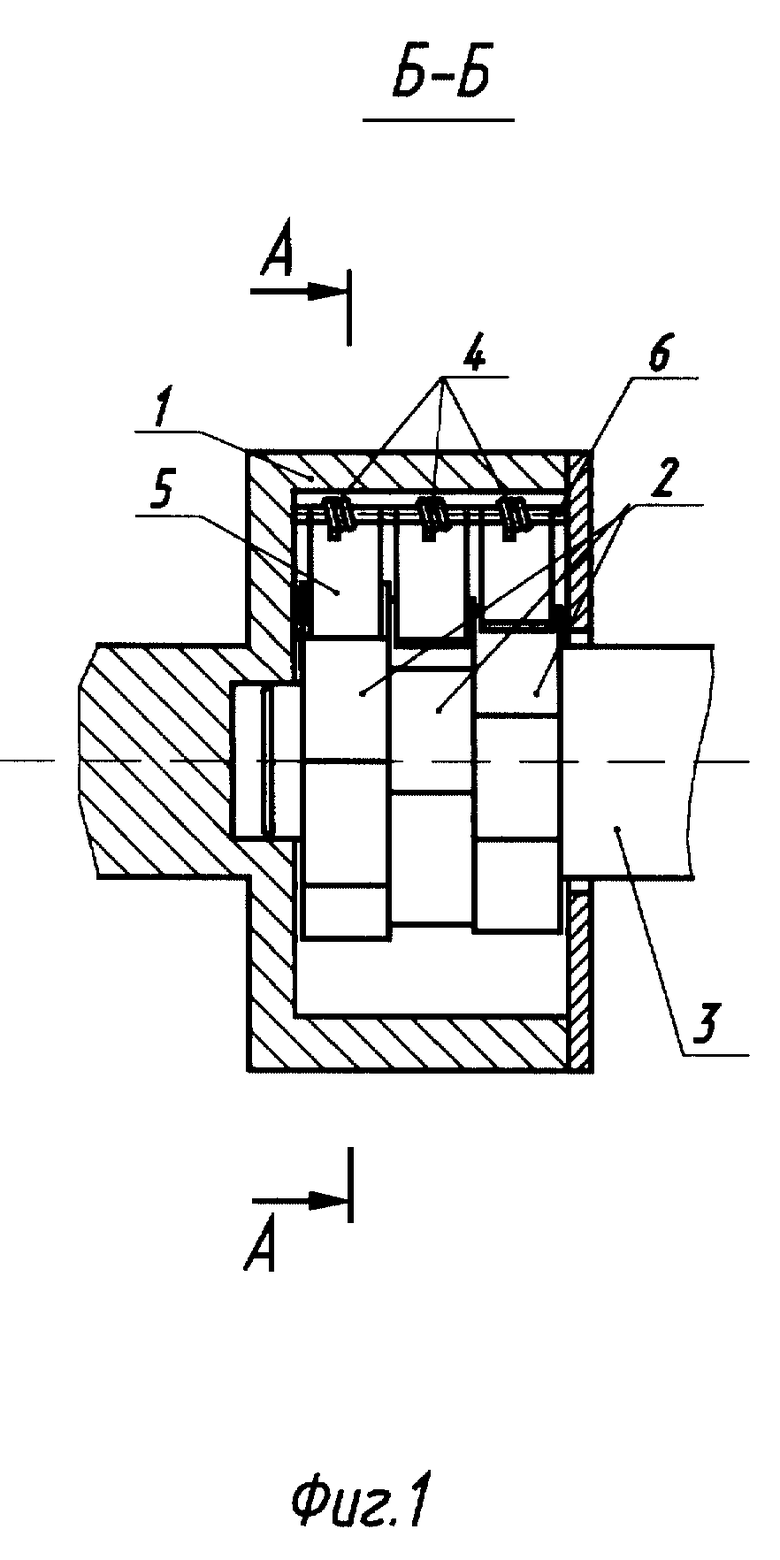

где ϕ - угловой шаг механизма свободного хода с одним пакетом заклинивающих стержней в o;
m - количество пакетов заклинивающих стержней.
| Механизм свободного хода | 1976 |
|
SU618588A1 |
| Храповой механизм свободного хода | 1973 |
|
SU482585A1 |
| Храповой механизм свободного хода | 1987 |
|
SU1439341A1 |
| Храповой механизм свободного хода | 1979 |
|
SU836415A1 |
| Храповой механизм свободного хода | 1983 |
|
SU1089317A1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
