Изобретение относится к измерительной технике и может быть использовано для двухкоординатных измерений угловых пе ремещений в различных системах управления и в машиностроении.
Целью изобретения является повышение точности измерения двухкоординатных угловых перемещений за счет уменьшения нелинейности выходной характеристики, исключения взаимного влияния измерительных каналов двухкоординатного преобразователя перемещений и обеспечения температурной стабильности преобразователя
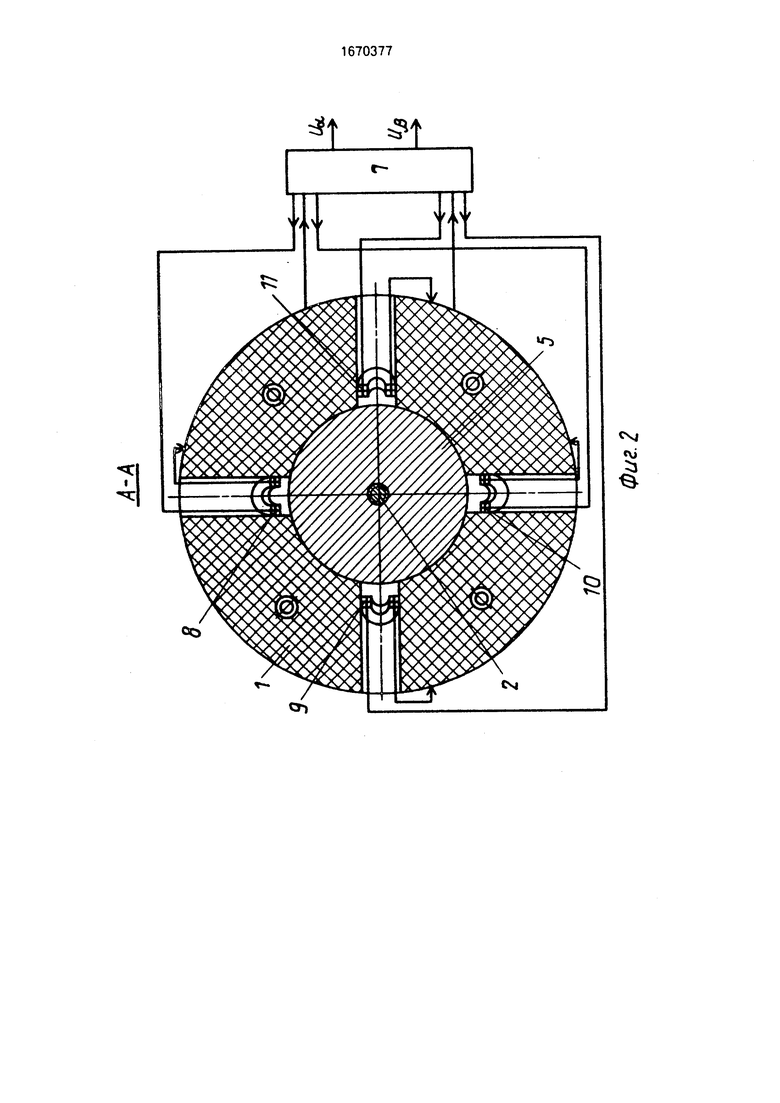
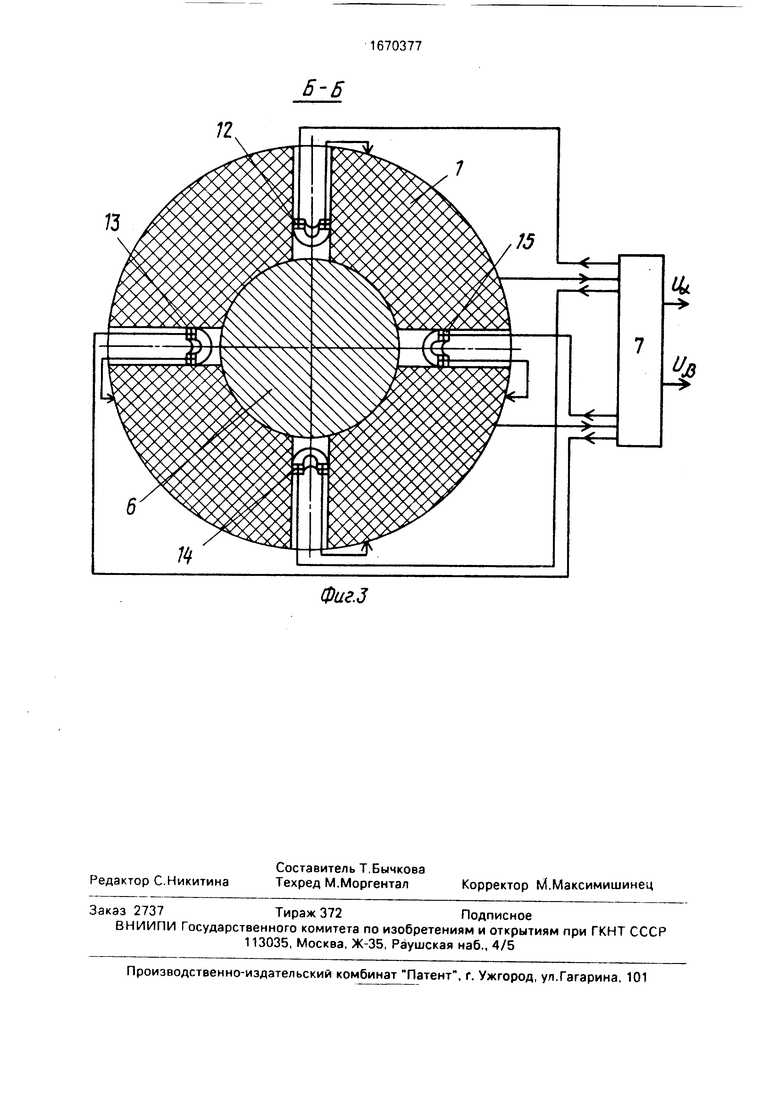
На фиг. 1 схематично изображена конструкция доухкоординатного преобразователя, разрез; на фиг. 2 - разрез А А на фиг 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Двухкоординзтный преобразователь угловых перемещений содержит разъемный диэлектрический корпус 1 с сферической полос 1ью в нем и секторным вырезом. В этом вырозе размещено звено для связи с контролируемым объектом (не показано), выполненное в виде жесткого стержня 2 и установочной конусной пружины 3. В сферической полости корпуса 1 размещен с возможностью углового перемещения шарообразный элемент 4, центр которого совпадает с центром этой полости Шарообразный элемент 4 состоит из двух частей 5 и б, имеющих форму полушарий и выполненных из диамагнитных материалов
Электропроводность 01 материала части 5 шарообразного элемента 4 отличается от электропроводности О2 материала части б более, чем на порядок, а отношение тем пературных коэффициентов удельных сопротивлений этих материалов в 1,2-1.3 раза превышает отношение этих электропровод- ностей. В стенках корпуса 1 преобразователя размещены плоские катушки индуктивности вихретокового датчика зазоров, имеющие радиус Яд и соединенные с электронным блоком 7 обработки сигналов этих катушек Первые две пары катушек 8-11 индуктивности установлены в общей плоское,и на
равном расстоянии oi поверхности шарообразного элемента 4 с взаимным угловым смещением катушек разных пар на 9СГ Плоскость размещения катушек 8 11 смещена относительно плоскости разъема корпуса
Iна расстояние Н RA Дополнительные две пары катушек 12 1Ь индуктивности, выполненных идентично катушкам первых двух пар, установлены зеркально симметрично
относительно них на том же расстоянии Н от плоскости разъема корпуса 1. Каждая из дополнительных катушек соединена последовательно-встречно с диаметрально противоположно расположенной огносительно
нее катушкой первых двух пар. а именно: 8 и 14, 9и 15, 10и 12 11 и 13
Двухкоординатныи преобразователь угловых перемещений работает следующим образом
На вихретокоиый датчик зазоров подается напряжение высокой частоты. В исходном состоянии преобразователя его шарообразный элемент 4 занимает под дей ствием пружины 3 звена для связи с объектом контроля такое положение, при котором плоскость раздела его двух частей 5 и Б совмещена с плоскостью разъема корпуса 1. В этом положении жесткий стержень 2 звена связи перпендикулярен этим плоскостям, а плоскость раздела частей 5 и 6 элемента 4 расположена на равном расстоянии от всех катушек индуктивности вихретокового датчика. При этом на катушках 8 IIдатчика возникают одинаковые сигналы высокого уровня, поскольку эти катушки
расположены около части 5 элемента 4, имеющей меньшую электропроводность о , чем электропроводность 02 части 6, около которой размещены катушки 12 - 15. На
этил катушках наводятся сигналы низкого уровня, поскольку на них влияют вихревые гоки наведенные в части 6 элемента 4, имеющей относительно более высокую электропроводность О2 Благодаря последовательному
и встречному соединению катушек 8 и 14 9 и
15, 10 и 12, 11 и 13 на их выводах формируются равные сигналы. Поскольку электрически соединенные катушки 9 и 15, 11 и 13, кроме того, соединены между собой последовательно-встречно, на выходе канала измерения угловой координаты а электронного блока 7 образуется нулевой сигнал Ua 0. Аналогично, благодаря электрическому встречно-последовательному соединению катушек 8 и 14,10 и 12, расположенных в корпусе 1 со смещением на 90° относительно катушек 9 и 15, 11 и 13, на выходе другого канала измерения угловой координаты / электронного блока 7 также образуется нулевой сигнал U 0. Нулевые напряжения Ua и Цб на выходе блока 7 будут сохраняться в некотором диапазоне 4у0 нечувст- вительности к перемещениям стержня 2 звена для связи преобразователя с контролируемым объектом. С учетом этого диапазона нечувствительности выбран угол ус взаимного расположения осей основных и дополнительных катушек относительно плоскости разъема корпуса с использованием следующего соотношения:
RZ
ус arcsln-jЈ + у0
где R - радиус шарообразного элемента 4, а
. Н - Rfl Уо arcsin .
к,
При угловом перемещении стержня 2 на
угол, превышающий угол +у0 , например по угловой координате а , сигналы на катушках 11 и 13 индуктивности изменяются в противоположную сторону, поскольку граница части 6 элемента 4 приближается к катушке 11, вызывая уменьшение сигнала в ней, а к катушке 13 приближается граница части 5 элемента 4, вызывая увеличение сигнала в ней.
При этом на соответствующих встречно присоединенных к ним катушках 9 и 15 сигнал изменяться не будет. Разностный выходной сигнал, снимаемый с катушек 9 и 15, а также 11 и 13, будет линейно изменяться в зависимости от величины угловой координаты а . Таким же образом формируются сигналы на катушках 8 и 14, 10 и 12 при перемещении стержня 2 по другой угловой координате +/ , превышающей угол 4у0 , что приводит к появлению на выходе блока 7 линейно изменяющихся напряжений Ua и УД не зависящих друг от друга. Благодаря различию электропроводностей двух частей шарообразного элемента 4 не менее, чем на порядок, обеспечивается высокая чувствительность преобразователя, а выбор материалов частей элемента 4 с отличающимися температурными коэффициентами удельного сопротивления обеспечивает стабильность и линейность выходной характеристики при
равномерном изменении температуры окружающей среды. Для снижения веса конструкции возможно выполнение шарообразного элемента преобразователя полым. Все эти факторы обеспечивают повышение точности измерения двухкоординатных угловых перемещений.
Формула изобретения
Двухкоординатный преобразователь угловых перемещений, содержащий разъемный диэлектрический корпус со сферической полостью и секторным вырезом, размещенное в этом вырезе звено для
связи с контролируемым объектом, выполненное в виде жесткого стержня и установочной конусной пружины, расположенный с возможностью углового перемещения в сферической полости корпуса шарообразный элемент, центр которого совпадает с центром этой полости и который состоит из двух частей, соединенных между собой с помощью жесткого стержня звена для связи и выполненных из материалов с различной
электропроводностью, плоскость раздела которых перпендикулярна к оси стержня, и вихретоковый датчик, выполненный в виде размещенных в стенке корпуса двух пар катушек индуктивности радиуса Rn, установленных в общей плоскости на равных расстояниях от поверхности шарообразного элемента с взаимным угловым смещением катушек разных пар на 90°, отличающийся тем, что, с целью повышения
точности измерения за счет уменьшения но линейности выходной характеристики, он снабжен двумя дополнительными парами катушек индуктивности, выполненных идентично катушкам первых двух пар и
установленных зеркально симметрично относительно них на расстоянии Н Рд от плоскости разъема корпуса, каждая из до . полнительных катушек соединена последовательно встречно с диаметрально
противоположно расположенной относительно нее катушкой первых двух пар. а обе части шара имеют форму полушарий, выполнены из диамагнитных материалов, электропроводности которых отличаются более,
чем на порядок, а отношение температурных коэффициентов удельных сопротивлений этих материалов в 1,2-1,3 раза превышает отношение их электропроводностей.
CI I I
d
со
«4J
t
Б-Б
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Двухкоординатный преобразователь | 1987 |
|
SU1420355A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| Преобразователь угловых перемещений | 1989 |
|
SU1696850A1 |
| Двухкоординатный преобразователь угловых перемещений | 1986 |
|
SU1379608A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
Изобретение относится к измерительной технике и имеет целью повышение точности измерения перемещений двухкоординатного преобразователя угловых перемещений, содержащего разъемный диэлектрический корпус 1 со сферической полостью, в которой размещен с возможностью углового перемещения шарообразный элемент 4, связанный с контролируемым объектом звеном связи и состоящий из двух частей 5 и 6, выполненных из диамагнитных материалов, электропроводности которых отличаются более, чем на порядок, а отношение температурных коэффициентов удельных сопротивлений в 1,2 - 1,3 раза превышает отношение их электропроводностей. В корпусе 1 размещены две пары основных катушек 8 - 11 индуктивности вихретокового датчика зазоров с радиусом Rд, которые установлены в общей плоскости со смещением H√д от плоскости разъема корпуса. Зеркально-симметрично им установлены в корпусе две пары дополнительных катушек 12 - 15 индуктивности, каждая из которых соединена встречно-последовательно с диаметрально противоположной катушкой первых двух пар. Поскольку катушки соединены между собой попарно последовательно-встречно, то при угловых перемещениях шарообразного элемента 4 по координатам α и β на выходах электронного блока 7 обработки формируются взаимно независимые сигналы, линейно зависящие от величин перемещения в заданном диапазоне измерения. 3 ил.
73
Фиг.З
| Двухкоординатный преобразователь угловых перемещений | 1988 |
|
SU1504494A1 |
