Изобретение относится к электроизмерительной технике и автоматике и может быть использовано в системах управления перемещением подвижных объектов.
Целью изобретения является повышение надежности преобразователя.
В преобразователь введен вихре- токовый измеритель зазоров, состоя- щий из четырех катушек индуктивности и электронного блока, а звено связи с объектом контроля закреплено в каркасе с помощью сферического шарнира, выполненного в виде электро проводящего шара, расположенного эксцентрично внутри диэлектрической полусферы.
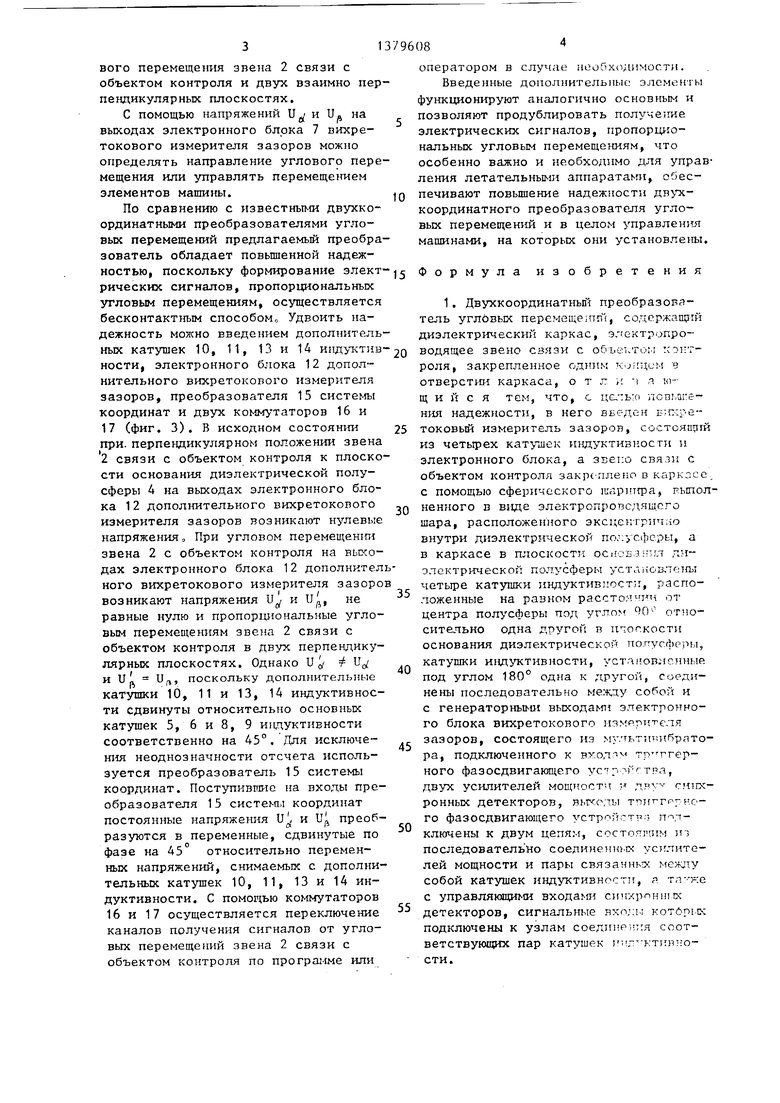
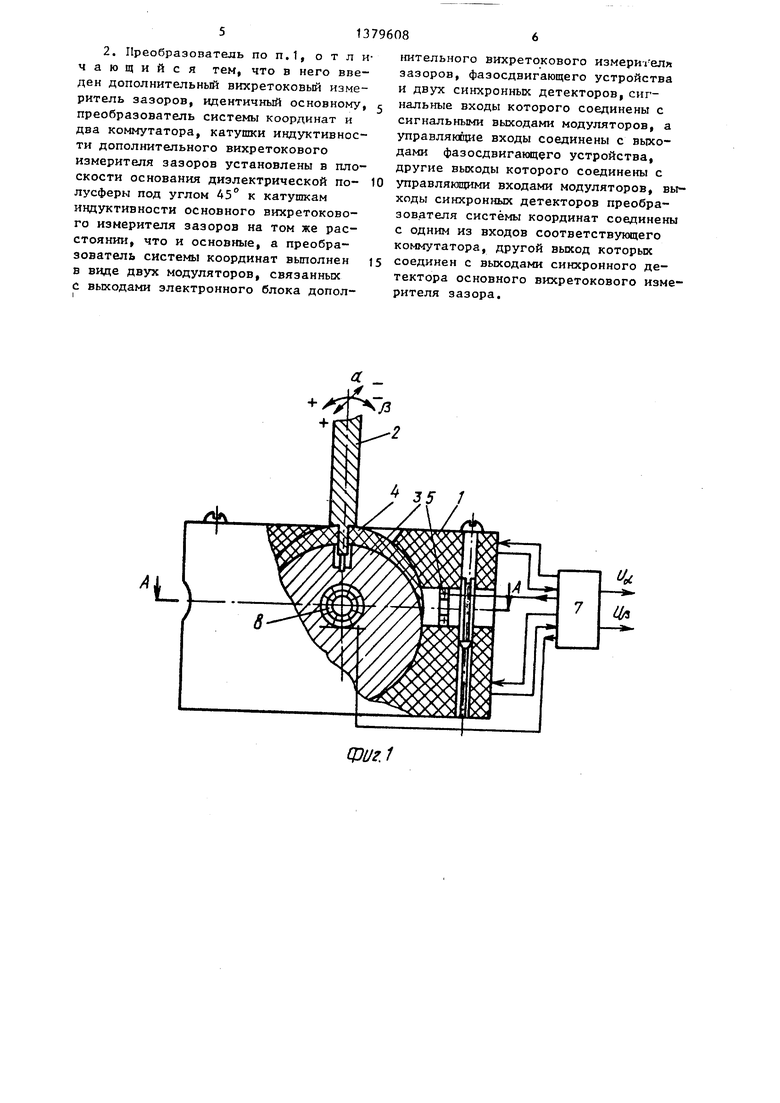
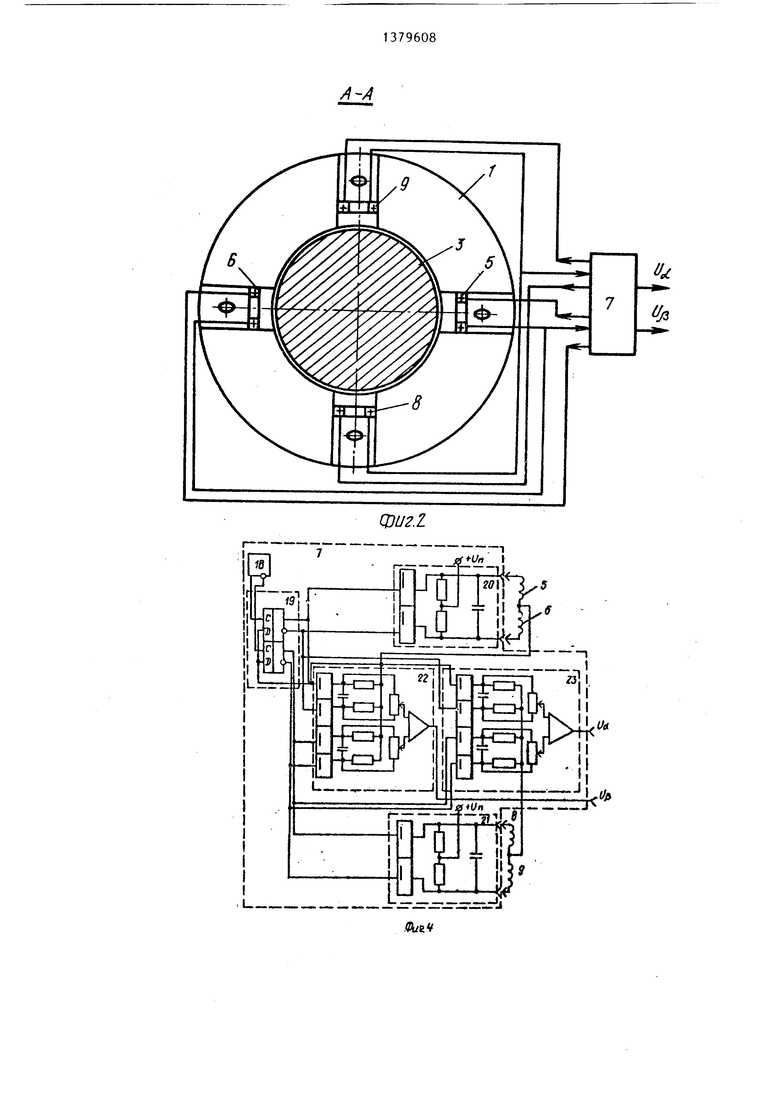
На фиг. 1 показана конструкция двухкоординатного преобразователя, вид спереди; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - конструкция преобразователя с дополнительными элементами, вид сверху; на фиг. А - схема электронного блока вихретоко- вого измерителя зазоров; на фиг, 5 - схема преобразователя системы координат.
Преобразователь (фиг. 1 и 2) содержит диэлектрический каркас 1, электропроводящее звено 2 связи с объектом контроля, на конце которого на резьбе соосно установлены электропроводящий шар 3 и диэлектрическая полусфера 4 равных диаметров, шарнир но закрепленные в отверстии каркаса 1, катушки 5 и 6 индуктивности, которые соединены между собой с электронным блоком 7 вихретокового измерителя зазоров, катушки 8 и 9 индук- тивности, соединенные между собой и с электронным блоком 7 вихретокового измерителя зазоров и установленные под углом 90° относительно катушек 5 и 6 индуктивности.
Преобразователь с дополнительным вихретоковым измерителем зазоров (фиг.З) содержит дополнительные катушки 10 и 11 индуктивности, соединенные между собой и с электронньм
блоком 12 дополнительного вихретско- вого измерителя зазоров, и дополнительные катушки 13 и 14 индуктивности, соединенные между собой и с элек- троннмм блоком 12 дополнительного вихретокового измерителя зазоров, вы- .ход которого соединен с входом преобразователя 15 системы координат. Два выхода преобразователя 15 систес
0 5
0 5
0 0 5
0
с
мы координат связа.ны с входами двух коммутаторов 16 и 17, другие входы которых соединены с выходами электронного блока 7 вихретокового измерителя зазоров.
Блок 7 состоит из мультивибратора 18, фазосдвигающего блока 19, двух усилителей 20 и 21 мощности, подключенных соответственно к катушками 5, 6 и 8, 9 индуктивности, и двух синхронных детекторов 22 и 23, управляющие входы которых соединены с выходами фазосдвигающего блока 19, а сигнальные входы соединены с узлами соединения соответствующих катушек 5, 6 и 8, 9 индуктивности.
Преобразователь 15 системы координат включает в себя два модулятора 24 и 25, соединенные с соответствующими выходами электронного блока 12 дополнительного вихретокового преобразователя, два синхронных детектора 26 и 27, сигнальные входы которых соединены с выходами модуляторов 24 и 25, и фазосдвигающий блок 28, подключенный к управляюпснм входам модуляторов 24 и 25 и синхронных детекторов 26 и 27.
Преобразователь работает следующим образом.
В исходном состоянии при перпендикулярном положении звена 2 связи с объектом контроля относительно плоскости основания диэлектрической полусферы 4 и при питании катушек 5, 6 и 8, 9 индуктивности напряжением высокой частоты, поступающим от электронного блока 7, сигналы с катушек 5, 6, 8 и 9 индуктивности, наведенные от магнитных полей вихре- токовых токов, протекаюп(их по поверхности электропроводящего шара 3, равны, поскольку зазоры между катушками 5, 6, 8 и 9 индуктивности и электропроводящим шаром 3 одинаковы. Поэтому на выходе электронного блока 7 вихретокового измерителя зазоров возникают нулевые напряжения. При угловом перемещении звена 2 связи с объектом контроля изменяются зазоры между катушками 5, 6, В и 9 индуктивности и электропроводящим шаром 3, что приводит к различным по величине сигналам на катушках 5, 6, 8 и 9 индуктивности, и на выходах электронного блока 7 вихретокового измерителя зазоров появляются напряжения U и и., соответствующие величине угло31
вого перемещения звена 2 связи с объектом контроля и двух взаимно перпендикулярных плоскостях,
С помощью напряжений и U. на выходах электронного блока 7 вихре- токового измерителя зазоров можно определять направление углового перемещения или управлять перемещением элементов мащины.
По сравнению с известными двухко- ординатными преобразователями угловых перемещений предлагаемый преобразователь обладает повьшенной надежностью, поскольку формирование электрических сигналов, пропорциональных угловым перемещениям, осуществляется бесконтактным способом Удвоить надежность можно введением дополнитель
1, Двухкоординатный преобраз тель угловых перемеп;е пш, содер диэлектрический каркас, электро
ных катушек 10, 11, 13 и 14 И щуктив-2о водящее звено связи с обьеито:.
ности, электронного блока 12 дополнительного вихретокового измерителя зазоров, преобразователя 15 системы координат и двух коммутаторов 16 и 17 (фиг, 3), В исходном состоянии при. перпендикулярном положении звена 2 связи с объектом контроля к плоскости основания диэлектрической полусферы 4 на выходах электронного блока 12 допол1штельного вихретокового измерителя зазоров возникают нулевые напряжения. При угловом перемещентш звена 2 с объектом контроля на выходах электронного блока 12 дополнитель ного вихретокового измерителя зазоров возникают напряжения U , и U
25
30
не
35
роля, закрепленное одним х л-;цим отверстии каркаса, о т л и ч а щ и и с я тем, что, с цс, :ь-о лс ния надежности, в него введан Е токовый измеритель зазоров, сос из четьфех катушек игадуктивиост электронного блока, а звепо свя объектом контроля закрс-плено в к с помощью сферического шарнира, ненного в В1ще электропровсдяш.с шара, расположенного эксцентрич внутри диэлектрической по.-;усфер в каркасе в плоскости ОСИСЕ.ЭНИЛ электрической полусферы устл йов четьфе катушки индуктивности, р ложенные на равном расстояние центра полусферы под угл,о сительно одна другой в и опкос основания диэлектрической полус катушки и адуктивности, устаиовл под углом 180° одна к другой, с нены последовательно ме.ж,цу собо с генераторньО О выходами электр го блока вихретоконого измерите зазоров, состоящего из мз . тьтияи ра, подключенного к входам тр т ного фазосдвигающего уст р тГттва двух усилителей мощности : дву ронньк детекторов, T lirrr го фазосдвигаюЕ1;его устройстр;з л ключены к двум цепям, состоящим последователь но соединеят.гх уси лей мощности и пары связаннь : м собой катушек индуктивности, л. с управляюш 1ми входами сиихрпнш детекторов, сигнальные HXO;;I. ко подключены к узлам соедииелтгя с ветствующих пар катушек сти.
равные нулю и пропорциональные угловым перемещениям звена 2 связи с объектом контроля в двух перпендикулярных плоскостях. Однако U U и и Uf,, поскольку дополнительные катушки 10, 11 и 13, 14 индуктивности сдвинуты относительно основных катушек 5, 6 и 8, 9 И11,цуктивности соответственно на 45°, Для исключения неоднозначности отсчета используется преобразователь 15 системы координат, Поступивпше на входы преобразователя 15 систеьа.1 координат
постоянные напряжения U
и и;
преобразуются в переменные, сдвинутые по фазе на 45 относительно переменных напряжений, снимаемых с дополнительных катушек 10, 11, 13 и 14 индуктивности, С помощью коммутаторов 16 и 17 осуществляется переключение каналов получения сигналов от угловых перемещений звена 2 связи с объектом контроля по программе или
ф о
оператором в случае необходимости.
Введенные дополнительные элементы функционируют аналогично основным и позволяют продублировать получе;гие электрических сигналов, пропорциональных угловым перемещениям, что особенно важно и необходимо для управления летательными аппаратами, обеспечивают повышение надежности координатного преобразователя угловых перемещений и в целом управления машинами, на которых они установлены.
рмула изобретения
ф о
1, Двухкоординатный преобразователь угловых перемеп;е пш, содержащир диэлектрический каркас, электропроводящее звено связи с обьеито:.
5
0
5
0
5
0
5
роля, закрепленное одним х л-;цим в отверстии каркаса, о т л и ч а ю- щ и и с я тем, что, с цс, :ь-о лсоьаге- ния надежности, в него введан Е-п-:ре-- токовый измеритель зазоров, состояпцш из четьфех катушек игадуктивиости и электронного блока, а звепо связи с объектом контроля закрс-плено в каркасе с помощью сферического шарнира, выполненного в В1ще электропровсдяш.сго шара, расположенного эксцентрично внутри диэлектрической по.-;усферы, а в каркасе в плоскости ОСИСЕ.ЭНИЛ диэлектрической полусферы устл йовлетП) четьфе катушки индуктивности, расположенные на равном расстояние от центра полусферы под угл,о относительно одна другой в и опкости основания диэлектрической полусферы, катушки и адуктивности, устаиовлелные под углом 180° одна к другой, соединены последовательно ме.ж,цу собой и с генераторньО О выходами электронного блока вихретоконого измерителя зазоров, состоящего из мз . тьтияибрато- ра, подключенного к входам тр тгер- ного фазосдвигающего уст р тГттва, двух усилителей мощности : сшгх- ронньк детекторов, T lirrrr pного фазосдвигаюЕ1;его устройстр;з ключены к двум цепям, состоящим ITT последователь но соединеят.гх усилителей мощности и пары связаннь : между собой катушек индуктивности, л. тп--ке с управляюш 1ми входами сиихрпнш.к детекторов, сигнальные HXO;;I. которых подключены к узлам соедииелтгя соответствующих пар катушек и;гл ктил :о- сти.
2. Преобразователь по п.1, отличающийся тем, что в него введен дополнительный вихретоковый измеритель зазоров, идентичный основного, преобразователь системы координат и два коммутатора, катушки индуктивности дополнительного вихретокового измерителя зазоров установлены в плоскости основания диэлектрической по- лусферы под углом 45° к катушкам ивдуктивности основного вихретокового измерителя зазоров на том же расстоянии, что и основные, а преобразователь системы координат выполнен в виде двух модуляторов, связанных с выходами электронного блока дополнительного вихретокового измери-1 еля зазоров, фазосдвигающего устройства и двух синхронных детекторов, сигнальные входы которого соединены с сигнальными выходами модуляторов, а управляющие входы соединены с вьрсо- дами фазосдвигающего устройства, другие вькоды которого соединены с управляющими входами модуляторов, выходы синхронных детекторов преобразователя системы координат соединены с одним из входов соответствующего коммутатора, другой выход которых соединен с выходами синхронного детектора основного вихретокового измерителя зазора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный преобразователь | 1987 |
|
SU1420355A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1670377A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО ПРОХОДНОГО КОНТРОЛЯ | 2007 |
|
RU2344413C2 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2077025C1 |
Изобретение может быть использовано в системах управления перемещением подвижных объектов. Цель изобретения состоит в повышении надежности преобразователя. При угловом перемещении звена 2 связи с объектом контроля изменяются зазоры между катушками 5, 6, 8, 9 индуктивности и электропроводящим шаром 3, что приводит к различным по величине сигналам на катушках 5, 6, 8, 9 индуктивности. На выходах соединенного с ними электронного блока 7 вихретокового измерителя зазоров появятся напряжения U и U , соот- ветствуюсдие величине углового перемещения звена 2 связи с объектом контроля в двух взаимно перпендикулярных плоскостях. Резервирование канала получения сигналов от угловых перемещений и повьш1ение надежности преобразователя достигается введением дополнительных катушек 10, 11, 13, 14 индуктивности, электронного блока 12 дополнительного вихретокового измерителя зазоров, преобразователя 15 системы координат и двух коммутаторов 16 и 17. Преобразователь 15 системы координат исключает неоднозначность отсчета с основных 5, 6, 8, 9 и дополнительных 10, 11, 13, 14 катушек индуктивности. Коммутаторы 16 и 17 служат для переключения каналов получения сигналов от угловых перемещений звена 2 связи с объектом контроля. 1 з.п. ф-лы, 5 ил. (О (Л со со О5 о 00 (Put, J
сриг.1
COU2.Z.
. un -L-.j
V
I
Фи.5
| Двухкоординатный преобразователь угловых перемещений | 1979 |
|
SU781556A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Потенциометрический преобразователь угловых перемещений | 1976 |
|
SU642605A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
