Предлагаемое изобретение относится к измерительной технике и может быть использовано в электродистанционных системах управления транспортными средствами, робототехническими комплексами и производственными процессами.
Известен двухкоординатный преобразователь угловых перемещений (А.С. СССР №1803722, G 01 В 7/30, 1993, БИ №11), содержащий корпус, управляющий стержень с дисковой частью, ползун, цилиндрические пружины и катушки индуктивности, соединенные с блоками электроники, причем управляющий стержень установлен в корпусе на сферическом шарнире. Это устройство содержит также четыре идентичных подвижных элемента, составленных из полых цилиндрических фрагментов, часть из которых выполнена из диэлектрического материала, а часть - из электропроводящего. Указанные четыре подвижных элемента подпружинены и располагаются с возможностью скольжения в четырех симметрично расположенных цилиндрических каналах корпуса, причем оси каналов параллельны оси управляющего стержня в нейтральном положении.
Недостатком известного устройства является сложность конструкции четырех подпружиненных подвижных элементов. Указанный недостаток проявляется при уменьшении габаритов двухкоординатного преобразователя перемещений.
Известен также преобразователь угловых перемещений (А.С. СССР №1696850, G 01 В 7/30, 1991, БИ №45), содержащий корпус, управляющий стержень с дисковой частью, цилиндрическую пружину, гофрированный упругий элемент с кольцевой плоскостью и катушки индуктивности, соединенные с блоками электроники, причем управляющий стержень установлен в корпусе на сферическом шарнире, а гофрированный упругий элемент выполнен из электропроводящего материала. В этом устройстве при перемещении управляющего стержня происходит деформация гофрированного упругого элемента, результатом чего является изменение ширины зазоров между кольцевой плоскостью гофрированного упругого элемента и четырьмя катушками индуктивности, расположенными симметрично относительно сферического шарнира на донной части корпуса под кольцевой плоскостью гофрированного упругого элемента, причем плоскости четырех катушек индуктивности параллельны кольцевой плоскости гофрированного упругого элемента при нейтральном положении управляющего стержня. Изменения ширины указанных зазоров приводят к изменениям выходных сигналов блоков электроники, причем изменения выходных сигналов пропорциональны перемещениям управляющего стержня по соответствующим направлениям.
Недостатком последнего устройства является нелинейность зависимости выходных сигналов от перемещений управляющего стержня. Причиной нелинейности указанной зависимости является то, что кольцевая плоскость гофрированного упругого элемента изгибается при перемещении управляющего стержня и зазоры между катушками индуктивности и кольцевой плоскостью гофрированного упругого элемента становятся клиновидными. Если углы отклонения управляющего стержня относительно нейтрального положения невелики (например, не более ±5°), то погрешность нелинейности не превышает (2...2,5)%. Однако при увеличении углов отклонения управляющего стержня до ±20° погрешность нелинейности возрастает до (30...35)%, что недопустимо велико.
Наиболее близким по технической сущности к заявляемому устройству является выбранный в качестве прототипа простой двухкоординатный преобразователь угловых перемещений с вихретоковыми чувствительными элементами (Ухлинов Д.И. Простой двухкоординатный преобразователь угловых перемещений с вихретоковыми чувствительными элементами. /Книга трудов международного симпозиума «Надежность и качество». - Пенза: Изд-во Пензенского государственного университета, 2004, стр.496-497), содержащий корпус, диэлектрическое основание, управляющий стержень с дисковой частью из электропроводящего материала, причем дисковая часть выполнена в виде конуса, а управляющий стержень установлен в диэлектрическом основании на сферическом шарнире, цилиндрическую пружину, ползун, четыре катушки индуктивности симметрично расположены в диэлектрическом основании и соединены попарно с блоками электроники, причем коническая поверхность дисковой части управляющего стержня обращена к катушкам индуктивности и в нейтральном положении равноудалена от всех четырех катушек индуктивности. В этом устройстве ползун и цилиндрическая пружина предназначены для приведения управляющего стержня в нейтральное состояние (при отсутствии управляющего воздействия), а катушки индуктивности вместе с блоками электроники образуют два вихретоковых измерителя зазоров. При угловом перемещении управляющего стержня происходит изменение ширины зазоров между конической поверхностью дисковой части управляющего стержня и катушками индуктивности, результатом чего является соответствующее изменение выходных сигналов блоков электроники.
Недостатком прототипа является резкое возрастание погрешности преобразования углов отклонения (от нейтрального состояния) управляющего стержня при приближении указанных углов отклонения к предельному значению. Причиной недостатка является нелинейность статической характеристики преобразования вихретоковых измерителей зазоров, которая имеет экспоненциальный вид (Локшина Н.Н., Шкарлет Ю.М. Приближенная методика расчета накладных вихретоковых датчиков. «Дефектоскопия», №1, 1970). Из-за этого в паре катушек индуктивности (диаметрально противоположных относительно сферического шарнира) подключенных к одному блоку электроники и образующих (вместе с этим блоком электроники) один (из двух) вихретоковый измеритель зазоров, происходят следующие процессы. Угловое перемещение управляющего стержня приводит к увеличению ширины зазора между одной из двух рассматриваемых катушек индуктивности и конической поверхностью дисковой части управляющего стержня. А для второй (из рассматриваемых двух катушек индуктивности) катушки индуктивности происходит уменьшение ширины аналогичного зазора. Из-за экспоненциальности зависимости вносимого сопротивления в катушке индуктивности от ширины зазора, вносимое сопротивление в первой из двух рассматриваемых катушек индуктивности уменьшается меньше, чем увеличивается вносимое сопротивление во второй из двух рассматриваемых катушек индуктивности. Результатом этого является то, что при приближении углов отклонения управляющего стержня к предельному значению резко возрастает чувствительность преобразователя и нарушается линейность преобразования.
Вторым недостатком прототипа (присущим и рассмотренным аналогам) является угловой тип перемещений управляющего стержня и отсутствие в прототипе и аналогах возможности плоскостного перемещения подвижной части двухкоординатного преобразователя перемещений, которое требуется для управления некоторыми системами летательных аппаратов.
Поставлена задача - уменьшить погрешность нелинейности преобразования и обеспечить возможность плоскостного перемещения подвижной части двухкоординатного преобразователя перемещений с сохранением простоты конструкции и минимальности габаритов.
Поставленная задача решается за счет того, что двухкоординатный преобразователь перемещений, содержащий корпус, диэлектрическое основание, наконечник, управляющий стержень с дисковой частью из электропроводящего материала, причем дисковая часть выполнена в виде конуса, а управляющий стержень установлен в диэлектрическом основании на сферическом шарнире, цилиндрическую пружину, ползун, четыре идентичные катушки индуктивности, симметрично расположенные в диэлектрическом основании, причем катушки индуктивности попарно соединены с двумя блоками электроники и совместно с этими блоками электроники образуют два вихретоковых измерителя зазоров, а коническая поверхность дисковой части управляющего стержня обращена к катушкам индуктивности и в нейтральном положении равноудалена от всех четырех катушек индуктивности, и, согласно изобретению, управляющий стержень снабжен дополнительным сферическим шарниром, соединяющим управляющий стержень с наконечником, который имеет возможность двухкоординатного скольжения по верхней плоскости корпуса, а гнездо сферического шарнира в диэлектрическом основании выполнено в виде углубления с цилиндрическими боковыми стенками высотой в (1,55...1,6) раза больше, чем радиус шара этого шарнира, причем боковые стенки гнезда сферического шарнира в диэлектрическом основании возвышаются на высоту одного радиуса шара этого шарнира над рабочей плоскостью четырех катушек индуктивности, а коническая электропроводящая поверхность дисковой части управляющего стержня выполнена с кольцевой канавкой вокруг цилиндрической осевой части управляющего стержня вблизи шара сферического шарнира, причем шары обоих сферических шарниров выполнены как части управляющего стержня и диаметры шаров сферических шарниров в (1,5...1,6) раза больше, чем диаметр цилиндрической осевой части управляющего стержня, а расстояние между центрами шаров двух сферических шарниров в (2...2,2) раза больше, чем расстояние между центром сферического шарнира в диэлектрическом основании и осью каждой из четырех катушек индуктивности.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается тем, что управляющий стержень выполнен без наконечника и дополнительно снабжен вторым сферическим шарниром, посредством которого соединяются наконечник и управляющий стержень, а наконечник имеет возможность двухкоординатного скольжения по верхней плоскости корпуса, гнездо первого сферического шарнира выполнено таким образом, что его боковые стенки возвышаются на высоту одного радиуса шара сферического шарнира над рабочей плоскостью катушек индуктивности, коническая поверхность дисковой части управляющего стержня выполнена с кольцевой канавкой вокруг цилиндрической осевой части управляющего стержня вблизи шара сферического шарнира, а размеры шаров, гнезда сферического шарнира в диэлектрическом основании, длины управляющего стержня и расстояния между осями корпуса и катушек индуктивности связаны между собой определенными соотношениями. Таким образом, заявляемое устройство соответствует критерию изобретения «новизна».
Сравнение заявляемого решения с другими техническими решениями показывает, что в известных устройствах отсутствует осевое перемещение управляющего стержня при его угловых перемещениях за счет плоскостного перемещения наконечника. Это позволяет сделать вывод о соответствии технического решения критерию «изобретательский уровень».
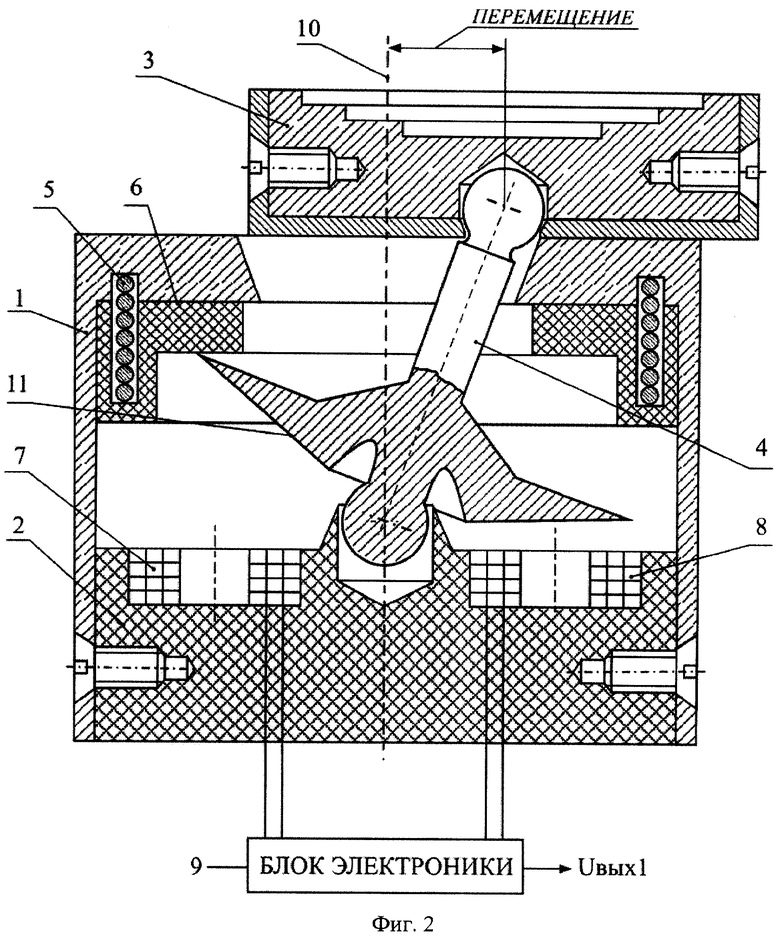
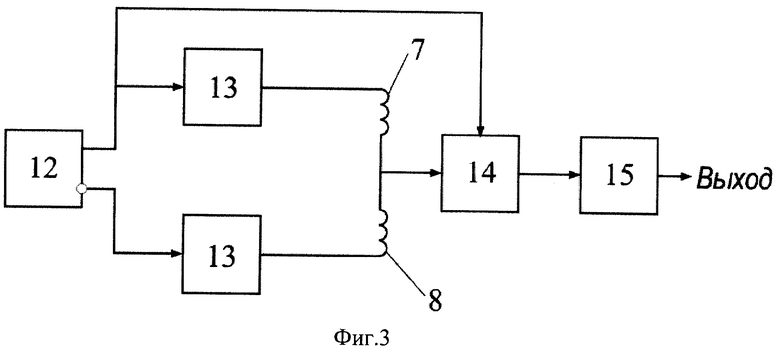
Сущность изобретения поясняется чертежами, где на фиг.1 показан разрез электромеханической части двухкоординатного преобразователя перемещений в нейтральном положении подвижных частей, а на фиг.2 показан аналогичный чертеж при максимальном смещении подвижных частей относительно нейтрального положения. На фиг.3 показана функциональная схема одного их двух идентичных блоков электроники.
Предлагаемый двухкоординатный преобразователь перемещений (фиг.1) содержит корпус 1, диэлектрическое основание 2, наконечник 3, управляющий стержень 4, цилиндрическую пружину 5, ползун 6, четыре идентичных катушки индуктивности 7, 8 (на чертеже видны только две катушки 7, 8), два идентичных блока электроники 9. Кроме того, на фиг.1 обозначено: 10 - ось корпуса 1 и 11 - коническая поверхность электропроводящей дисковой части управляющего стержня 4. Блоки электроники выполнены по идентичным схемам (фиг.3) и в их состав входят следующие элементы: 12 - симметричный мультивибратор, два усилителя мощности 13, синхронный детектор 14 и усилитель постоянного напряжения 15.
Предлагаемое устройство работает следующим образом. В нейтральном положении управляющего стержня 4. (фиг.1) коническая поверхность 11 электропроводящей дисковой части управляющего стержня 4 равноудалена от катушек индуктивности 7, 8. Поэтому вносимые сопротивления в обеих катушках индуктивности 7, 8 равны между собой. Катушки индуктивности 7, 8 подключены к блоку электроники 9 по дифференциальной схеме, поэтому выходное напряжение блока электроники 9 равно нулю при нейтральном положении управляющего стержня 4. Блок электроники 9 может быть выполнен аналогично приведенному в А.С. СССР №1379608, G 01 В 7/30, 1988, БИ №9, и его принцип действия будет описан ниже. На фиг.1 и фиг.2 показан только один из двух блоков электроники 9, так как второй блок электроники подключается к двум катушкам индуктивности, не показанным на фиг.1 и фиг.2, ибо непоказанные катушки индуктивности расположены в той же плоскости, что и показанные катушки индуктивности 7, 8, но смещены относительно последних на 90°.
При перемещении наконечника 3, например, так, как показано на фиг.2, управляющий стержень 4 поворачивается относительно оси 10 корпуса 1 и смещается вдоль оси 10 корпуса 1 (на фиг.2 показано смещение вверх) относительно нейтрального положения.
Одновременно ползун 6 поднимается вверх и сжимает цилиндрическую пружину 5. В этом случае коническая поверхность 11 приближается к катушке индуктивности 8 и удаляется от катушки индуктивности 7, что сопровождается увеличением вносимого сопротивления в катушке индуктивности 8 и уменьшением вносимого сопротивления в катушке индуктивности 7. Различие вносимых сопротивлений в катушках индуктивности 7, 8 преобразуется в блоке электроники 9 в выходное напряжение Uвых1, пропорциональное перемещению наконечника 3.
Осевое смещение (вверх) управляющего стержня 4 при перемещении наконечника 3 приводит к тому, что коническая поверхность 11 приближается к катушке индуктивности 8 медленнее, чем удаляется от катушки индуктивности 7. За счет неравенства приращений зазоров осуществляется линеаризация зависимости выходного напряжения блока электроники 9 от перемещения наконечника 3.
Блок электроники 9 работает следующим образом. Симметричный мультивибратор 12 формирует две противофазные последовательности импульсов напряжения, которые усиливаются по мощности в двух усилителях мощности 13 и питают катушки индуктивности 7, 8 в электромеханической части двухкоординатного преобразователя перемещений. Усилители мощности 13 и катушки индуктивности 7, 8 образуют мостовою цепь, переменное напряжение на выходе которой (в узле соединения катушек индуктивности 7, 8) пропорционально разности вносимых сопротивлений в катушках индуктивности 7 и 8. Синхронный детектор 14 преобразует переменное выходное напряжение в постоянное, которое усиливается в усилителе 15 и поступает на выход двухкоординатного преобразователя перемещений (Uвых.1).
Второй блок электроники (на фиг.1 и 2 не показан) подключен к катушкам индуктивности, смещенным относительно катушек индуктивности 7 и 8 на 90°, и формирует выходное напряжение Uвых.2, пропорциональное перемещениям наконечника 3 в направлении, перпендикулярном плоскости чертежей фиг.1 и фиг.2.
Соотношения размеров шаров, высоты гнезда сферического шарнира в диэлектрическом основании 2, длины управляющего стержня 4 и расстояний между осями корпуса 1 и катушек индуктивности 7, 8 подбирались экспериментально таким образом, чтобы снизить погрешность нелинейности преобразования перемещений наконечника 3 в выходной электрический сигнал (Uвых.1, Uвых.2) до приемлемого уровня ±2% и при этом насколько возможно сохранить уровень чувствительности преобразования.
Экспериментальные исследования предлагаемого двухкоординатного преобразователя перемещений показывают, что в диапазоне угловых перемещений управляющего стержня 4 (относительно нейтрального положения) ±20°, по каждой из двух координат, погрешность нелинейности не превышает ±2%. Кроме того, двухкоординатные перемещения наконечника в одной плоскости придают предлагаемому устройству новые дополнительные преимущества в сфере применения, особенно для современных летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2339908C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| Двухкоординатный преобразователь угловых перемещений | 1986 |
|
SU1379608A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2077025C1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1670377A1 |
Изобретение относится к измерительной технике и может быть использовано в электродистанционных системах управления транспортными средствами, робототехническими комплексами и производственными процессами. Сущность: двухкоординатный преобразователь перемещений содержит корпус, диэлектрическое основание, наконечник, управляющий стержень с дисковой частью из электропроводящего материала, установленный в диэлектрическом основании на сферическом шарнире, цилиндрическую пружину, ползун, четыре идентичные катушки индуктивности, симметрично расположенные в диэлектрическом основании. Катушки индуктивности попарно соединены с двумя блоками электроники и совместно с этими блоками электроники образуют два вихретоковых измерителя зазоров. Коническая поверхность дисковой части управляющего стержня обращена к катушкам индуктивности и в нейтральном положении равноудалена от всех четырех катушек индуктивности. Управляющий стержень снабжен дополнительным сферическим шарниром, соединяющим управляющий стержень с наконечником, который имеет возможность двухкоординатного скольжения по верхней плоскости корпуса. Гнездо сферического шарнира в диэлектрическом основании выполнено в виде углубления с цилиндрическими боковыми стенками высотой в (1,55...1,6) раза больше, чем радиус шара этого шарнира. Боковые стенки гнезда сферического шарнира в диэлектрическом основании возвышаются на высоту одного радиуса шара этого шарнира над рабочей плоскостью четырех катушек индуктивности. Технический результат: уменьшение погрешности преобразования и обеспечение возможности плоскостного перемещения подвижной части. 3 ил.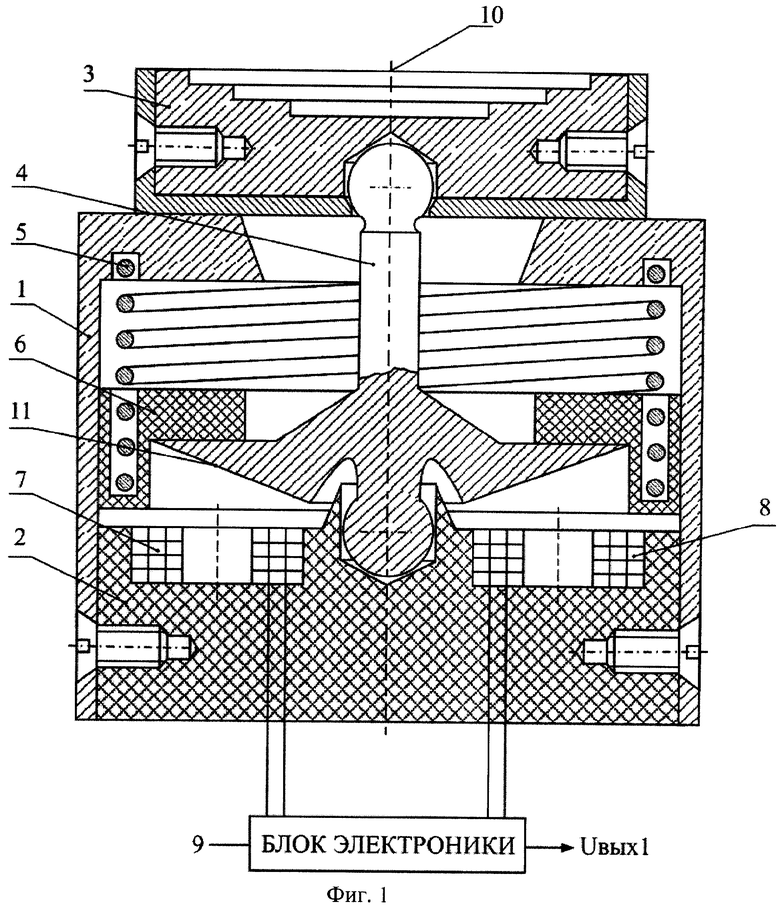
Двухкоординатный преобразователь перемещений, содержащий корпус, диэлектрическое основание, наконечник, управляющий стержень с дисковой частью из электропроводящего материала, причем дисковая часть выполнена в виде конуса, а управляющий стержень установлен в диэлектрическом основании на сферическом шарнире, цилиндрическую пружину, ползун, четыре идентичные катушки индуктивности, симметрично расположенные в диэлектрическом основании, причем катушки индуктивности попарно соединены с двумя идентичными блоками электроники и совместно с этими блоками электроники образуют два вихретоковых измерителя зазоров, а коническая поверхность дисковой части управляющего стержня обращена к катушкам индуктивности и в нейтральном положении равноудалена от всех четырех катушек индуктивности, отличающийся тем, что управляющий стержень снабжен дополнительным сферическим шарниром, соединяющим управляющий стержень с наконечником, который имеет возможность двухкоординатного скольжения по верхней плоскости корпуса, а гнездо сферического шарнира в диэлектрическом основании выполнено в виде углубления с цилиндрическими боковыми стенками высотой в (1,55...1,6) раза больше, чем радиус шара этого шарнира, причем боковые стенки гнезда сферического шарнира в диэлектрическом основании возвышаются на высоту одного радиуса шара этого шарнира над рабочей плоскостью четырех катушек индуктивности, а коническая электропроводящая поверхность дисковой части управляющего стержня выполнена с кольцевой канавкой вокруг цилиндрической осевой части управляющего стержня вблизи шара сферического шарнира, причем шары обоих сферических шарниров выполнены как части управляющего стержня, и диаметры шаров сферических шарниров в (1,5...1,6) раза больше, чем диаметр цилиндрической осевой части управляющего стержня, расстояние между центрами шаров двух сферических шарниров в (2...2,2) раза больше, чем расстояние между центром сферического шарнира в диэлектрическом основании и осью каждой из четырех катушек индуктивности.
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| US 4855704 А1, 10.11.1988. | |||

