Изобретение относится к области прецизионного приборостроения и может быть использовано в навигационных системах, в приборах управления движущимися объектами, для измерения ускорений, действующих на объект.
Известен акселерометр с электромагнитным подвесом, содержащий сферическую массу, емкостные датчики положения, следящие системы, включающие блоки коррекции, выходные усилители, силовые катушки, по две штуки на каждую из двух ортогональных осей, и корпус. Акселерометр не требует для своей работы вакуум (патент США, 3508445 от 28.04.1979).
Прибор имеет следующие недостатки:
- низкая подъемная сила, определяемая большим воздушным зазором, а следовательно, большим магнитным сопротивлением между катушками и массой;
- две симметричные части корпуса "разрезают" четыре силовые катушки и емкостные пластины пополам.
Известен пространственный акселерометр с электромагнитным подвесом (Россия, патент 2082173, заявл. 2.03.1994, опубл. 20.06.1997), который взят за прототип. Акселерометр содержит чувствительную ферромагнитную массу и последовательно соединенные восьмиканальный датчик положения по два на каждую из четырех измерительных осей, предварительные усилители, линейный преобразователь в ортогональную систему координат, блок коррекции, обратный преобразователь в четырехосную систему координат, распределитель сигналов, восемь электромагнитных катушек по две на каждую ось.
Акселерометр не требует для своей работы наличия вакуума вокруг чувствительной массы, кроме того, корпус прибора, в котором расположены силовые катушки и емкостные датчики, из-за наличия четырех осей является симметричным и не "разрезает" элементы подвеса пополам. Емкостные датчики положения по каждой из четырех измерительных осей определяют смещение массы из среднего положения в зазоре, их выходные сигналы усиливаются в предварительных усилителях и поступают на входы линейных преобразователей, которые преобразуют сигналы в ортогональную систему координат. Данные сигналы поступают на вход блока коррекции, который обеспечивает устойчивость системы подвеса и вводит интегрирование в цепь обратной связи для обеспечения нулевой статической ошибки. Выход блока коррекции соединен с входом линейного преобразователя в четырехосную систему координат, четыре его выхода через распределитель сигналов соединены с соответствующими силовыми электромагнитными катушками. Распределитель сигналов усиливает четыре сигнала по мощности и каждый из них подает на входы двух, расположенных друг против друга, катушек так, что при этом в одной катушке средний ток I0 уменьшается, а в другой - увеличивается. При этом возникает вдоль данной оси разница сил, которая возвращает чувствительную массу в среднее положение в зазоре. Выходные сигналы блока корректора при этом пропорциональны действующему на массу ускорению.
Недостатком данного акселерометра является его сложность, обратная связь, начиная с датчика положения, состоит из пяти последовательно включенных блоков. Акселерометр имеет невысокую чувствительность, так как заданный начальный ток I0 для работы в условиях Земли должен компенсировать ускорение свободного падения 1g. Реально для аналоговой электроники обратной связи подвеса нестабильность по току в катушках составляет 10-4 I0.
При этом сумма ускорений, действующих на массу вдоль одной оси ξ, равна:
где Aвн - внешнее ускорение;
m0 - масса чувствительного элемента; производная индуктивности одной катушки;
производная индуктивности одной катушки; производная индуктивности другой катушки;
производная индуктивности другой катушки;
L0 - индуктивность катушки при среднем положении массы в зазоре; относительное смещение массы в зазоре;
относительное смещение массы в зазоре;
d0 - средний зазор между массой и силовой катушкой;
I1= Io-ΔI - ток в одной катушке;
I2= Io+ΔI - ток в другой катушке;
ΔI - приращение тока в катушках, компенсирующее внешнее ускорение.
В условиях малого смещения тела при наличии интегратора имеем α = 0, тогда:
При равновесии тела суммарное ускорение равно 0 и имеем линейную зависимость между измеряемым ускорением Aвн и приращением тока ΔI.
При Aвн = 1g имеем ΔI = Io.
А при малых Aвн нестабильность тока катушек δI = 10-4 I0 определит чувствительность акселерометра Amin = 10-4g.
Такая чувствительность, особенно для космических акселерометров, мала. Для повышения чувствительности до величины 10-6g можно уменьшить величину I0 в сто раз. Но при этом акселерометр будет работать только в невесомости в космических условиях, а в условиях Земли он не сможет противостоять ускорению свободного падения. При этом невозможно проверить его работоспособность, так как создать достаточно долго невесомость в условиях Земли невозможно. А непроверенный прибор никогда не отправят работать в космос. Существует неразрешимое противоречие.
Целью предлагаемого изобретения является повышение динамического диапазона измерения ускорения, обеспечение работоспособности в космическом пространстве при возможности проверки его работы в условиях Земли, упрощение акселерометра, уменьшение его габаритов, веса и энергопотребления.
Поставленная цель достигается тем, что в пространственном акселерометре с электромагнитным подвесом, содержащим чувствительную сферическую массу, восьмиканальный датчик положения, по два на каждую из четырех измерительных осей, предварительные усилители, линейные преобразователи в ортогональную систему координат, блок коррекции, обратный преобразователь в четырехосную систему координат, распределитель сигналов, восемь электромагнитных катушек и чувствительную массу, предварительные усилители, линейный преобразователь координат и блок коррекции образуют входной блок, причем в каждом из трех каналов входного блока восемь первых резисторов подключены с одной стороны - к выходам датчика положения, а с другой стороны четыре резистора подключены к входу первого усилителя, другие четыре резистора подключены к инверсному входу первого усилителя и далее через последовательно соединенные первый конденсатор, второй и третий резистор подключены к выходу первого усилителя, который соединен через третий конденсатор со своим инверсным входом, а точка соединения второго и третьего резисторов соединены через последовательно включенные второй конденсатор и четвертый резистор к общему проводу, кроме того, обратный преобразователь координат и распределитель сигналов выполнены в виде одного выходного блока, содержащего в каждом из четырех каналов четыре штуки пятых резисторов, подключенных с одной стороны к трем соответствующим выходам входного блока и к общему проводу, а с другой стороны два резистора соединены с входом второго усилителя и через шестой резистор с общим проводом, два других резистора подключены к инверсному входу второго усилителя и далее через последовательно соединенные седьмой и восьмой резисторы к общему проводу, выход второго усилителя соединен с базами двух транзисторов, коллекторы которых соединены через соответствующие электромагнитные катушки с источниками питания, а эмиттеры подключены к точке соединения седьмого и восьмого резисторов.
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена схема акселерометра, а на фиг. 2 показаны логарифмические амплитудно-частотные и фазовые характеристики разомкнутой системы автоматического управления подвесом.
Как показано на фиг. 1, акселерометр состоит из чувствительной массы 1, восьмиканального датчика положений 2, входного блока 3, выходного блока 4, блока из восьми электромагнитных катушек 5, источников питания 6, 7, причем входной блок содержит в каждом из трех каналов восемь входных резисторов 8, резисторы обратной связи 9, 10, 11, емкости обратной связи 12, 13, 14, усилитель 15, выходной блок содержит в каждом из четырех каналов входные резисторы 16, резисторы обратной связи 17, 18, 19, транзисторы 20, 21, усилитель 22, а в каждом из четырех каналов блока силовых катушек две катушки 23, 24.
При этом восьмиканальный датчик положений 2 соединен через последовательно соединенные входной блок 3, выходной блок 4 с электромагнитными катушками 5, причем в каждом из трех каналов входной блок 3 имеет восемь входных резисторов 8, четыре из которых включены между входом усилителя 15 и соответствующими четырьмя выходами датчика положений 2, его другие четыре выхода соединены через соответствующие другие четыре резистора 8 к инверсному входу усилителя 15 и далее через последовательно соединенные конденсатор 12, резистор 9, резистор 10 подключен к выходу усилителя 15, который через конденсатор 14 соединен со своим инверсным входом, точка соединения резисторов 9 и 10 подключена через конденсатор 13 и резистор 11 к общему проводу, а в каждом из четырех каналов выходного блока 4 три входных резистора 16 соединены с соответствующими выходами входного блока, четвертый входной резистор 16 включен между общим проводом и входом усилителя 22, куда подключен также другим электродом один из трех входных резисторов 16, и далее через резистор 17 соединен с общим проводом, остальные два входных резистора 16 другими электродами подключены к инверсному входу усилителя 22 и через резистор 18 к эмиттерам транзисторов 20, 21 и далее через резистор 19 соединены с общим проводом, выход усилителя 22 подключен к базам транзисторов 20 и 21, а их коллекторы соединены через соответствующие катушки 23 и 24 к источникам питания 6 и 7, причем катушки 23, 24 расположены вдоль данной оси акселерометра с двух сторон от чувствительной массы рядом с соответствующей парой емкостных датчиков перемещения 2.
Работает акселерометр следующим образом.
Чувствительная масса 1, взвешенная в пространстве с помощью магнитного поля катушек 5, под действием внешнего ускорения "a" стремится отклониться от центрального положения из центра в зазоре, данное перемещение измеряется датчиком положения 2. Датчик положения имеет четыре оси и в каждой оси с противоположных сторон от чувствительной массы находятся два емкостных электрода. При этом по каждой оси образуются два противофазных выходных сигнала, абсолютная величина которых пропорциональна перемещению ротора.
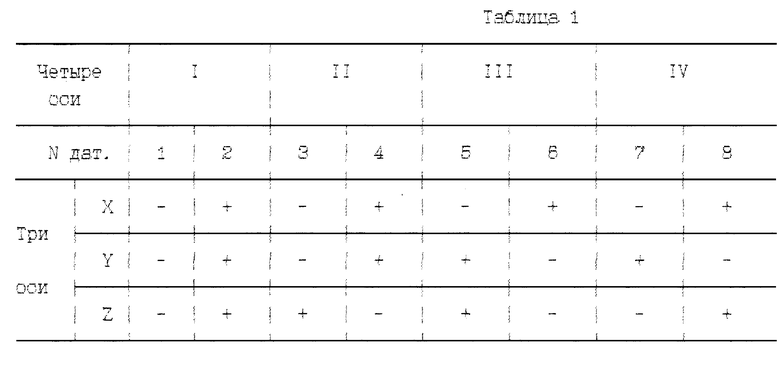
Восемь выходных сигналов датчика положения 8 поступит в каждом из трех каналов входного блока на входные резисторы усилителя 15, которые включены согласно таблице 1 так, что четыре сигнала складываются, а четыре - вычитаются, осуществляя преобразование четырехосной системы координат в трехосную ортогональную систему X, Y, Z (табл. 1 и 2 см. в конце описания).
При этом вычитаемые сигналы поступают на инверсный вход, а складываемые - на прямой вход усилителя 15. В обратную связь усилителя 14 включены R, C элементы, которые обеспечивают совместно с входными резисторами 8 сложение и вычитание входных сигналов, их усиление и частотную коррекцию результирующего сигнала. Цепь C12, (R9 + R10) обеспечивает интегрирование сигнала для исключения статической погрешности акселерометра, цепь C12, R9 осуществляет дифференцирование сигналов для обеспечения устойчивости системы управления, резистор R11 и конденсатор C14 обеспечивают спад АЧХ вне полосы пропускания акселерометра для уменьшения влияния высокочастотных шумов. Выходные сигналы усилителей 15 Vx, Vy, Vz в каждом из трех каналов прямо пропорциональны ускорениям, действующим вдоль осей X, Y, Z на чувствительную массу, которая из-за работы интегратора находится в центре зазора.
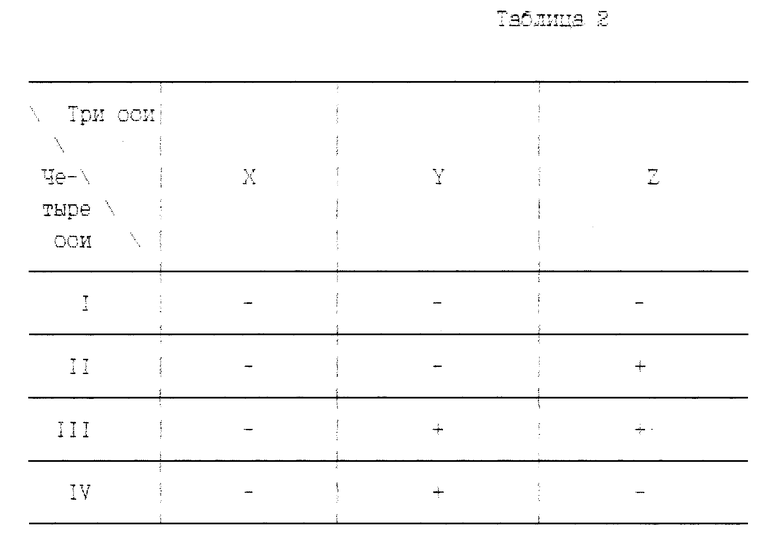
Данные сигналы затем подаются на три входа в каждом из четырех каналов выходного блока 4. Порядок их подключения описывается таблицей 2, которая определяет, какие входные сигналы складываются, какие вычитаются.
Вычитаемые сигналы подключаются через резисторы 16 к инверсному входу усилителя 22, а складываемые - к прямому входу усилителя. Сопротивление резисторов 17 и 18 равны между собой их отношение к сопротивлению резисторов 16 определяет коэффициент передачи усилителя. Сопротивление обратной связи 18 подключено не к выходу усилителя 22, а к эмиттерам транзисторов 20 и 21 и к резистору 19. При этом напряжение, возникающее на резисторе 19, точно соответствует таблице 2, оно создает ток через резистор 19, который при положительном значении поступает через транзистор 20 в катушку 23, а при отрицательном значении - через транзистор 21 в катушку 24. Данные токи создают отрицательную обратную связь в акселерометре, в результате чего магнитное поле одной из катушек данной оси удерживает чувствительную массу в середине зазора. При отсутствии внешних ускорений напряжения Vx, Vy, Vz равны нулю и токи во всех катушках акселерометра также равны нулю.
Таким образом, акселерометр работает без начального тока в катушках. При действии внешнего ускорения вдоль одной из измерительных осей прибора имеем равенство:
где Iк - ток в катушке, магнитное поле которой компенсирует внешнее ускорение;
K - постоянный коэффициент.
При действии в условиях Земли ускорения свободного падения ток в катушке равен максимальному Imax. Его нестабильность равна 10-4 Imax. Откуда минимальное измеряемое ускорение акселерометра составит:
Amin = K•(10-4•Imax)2 = K•Imax 2•10-8 = 10-8g.
Откуда видно, что диапазон измерения ускорения увеличился по сравнению с прототипом в 104 раз. При этом акселерометр имеет возможность работать в условиях Земли, а также измерять минимальные ускорения, характерные для космического пространства.
Наличие квадратичной зависимости от тока в катушках создает в цепи обратной связи акселерометра нелинейный элемент, т.е. имеем нелинейную систему управления. При этом возникает вопрос об обеспечении устойчивости работы акселерометра, т. к. нелинейные системы склонны к самовозбуждению. На фиг. 2 показаны логарифмические амплитудно-частотные и фазовые характеристики разомкнутой нелинейной системы отдельно для линейной и нелинейной частей согласно выражениям:
Kнелин. = Iк,
где S - чувствительность датчика положения;
Kос - коэффициент передачи электроники обратной связи входного и выходного блоков;
R19 - сопротивление резистора 19.
Выбираем реальные параметры цепей обратной связи:


Возбуждение в системе управления возможно в точке пересечения фазовой характеристики ϕ оси -180o. Таких точек две - "а" и "б". Для точки "а" находим соответствующую ей точку на графике Kлин. А на графике Kнелин такой точки нет, т.к. максимальный ток в катушке Imax ограничен величиной 10-2 А. Для точки "б" на графике Kнелин имеем соответствующую ей точку, которая определяет ток возбуждения 3•10-7 А. Этот ток меньше тока нестабильности в катушке (10-6 А), поэтому возбуждение акселерометра возможно за гранью чувствительного акселерометра на уровне 10-9g, что для работы акселерометра несущественно. Поэтому акселерометр устойчиво работает во всем своем рабочем диапазоне.
Таким образом, предлагаемый акселерометр по сравнению с прототипом значительно упрощен, т.к. в каждом канале он имеет только два активных блока - входной и выходной (в прототипе пять блоков). Это дает возможность значительно снизить габариты акселерометра, его вес и энергопотребление примерно в два раза. Динамический диапазон предлагаемого акселерометра шире на четыре порядка и составляет 108 (у прототипа 104). Это позволяет проверить работу акселерометра в условиях Земли при ускорении 1g и одновременно обеспечить работу акселерометра в условиях космоса, например, при ускорении 10-8g, создаваемым солнечным ветром.
Предлагаемый акселерометр найдет широкое применение для систем космической навигации, для контрольных систем космических печей, обеспечивающих плавку высокочистых материалов в условиях невесомости, что очень актуально в настоящее время и имеет громадное значение в будущем. Качество материала при этом прямо зависит от наличия действующих микроускорений, поэтому их необходимо жестко контролировать и исключать. Малые габариты, вес и энергопотребление позволяют эффективно использовать предлагаемый акселерометр для космических систем, т.к. они требуют минимизации этих параметров, для переносных систем навигации, например для навигации солдата в боевых условиях, т. к. габариты акселерометра не превышают габаритов цилиндра высотой 4 см и диаметром 4 см, для определения направлений при бурении труб для газовой и нефтяной промышленности, когда акселерометр должен опускаться непосредственно в узкую скважину, для управления манипуляторами роботов, работающих в прецизионных областях техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ АКСЕЛЕРОМЕТР С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1994 |
|
RU2082173C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЯ ТЕЛА | 1998 |
|
RU2175114C2 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |
| Линейный вакуумный акселерометр | 2017 |
|
RU2670178C2 |
| АКСЕЛЕРОМЕТР | 1985 |
|
RU2045761C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| СТРУННЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2292050C2 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2016 |
|
RU2629654C1 |

Акселерометр предназначен для использования в области прецизионной измерительной техники механических величин. Акселерометр содержит сферическую чувствительную массу, блок электромагнитных катушек, восьмиканальный датчик положения, по два на каждую из четырех измерительных осей, и электрическую схему. Повышение динамического диапазона измерения ускорения, обеспечение работы как на Земле, так и в космических условиях, упрощение акселерометра, уменьшение его габаритов, веса и энергопотребления достигается за счет схемных решений, которые минимизируют электрическую схему. Акселерометр работает без начальных токов в силовых катушках подвеса, цепи акселерометра обеспечивают устойчивость системы управления подвесом чувствительной массы, при этом обеспечивается резкое увеличение рабочего динамического диапазона. 2 ил., 2 табл.
Пространственный акселерометр с электромагнитным подвесом, содержащий сферическую чувствительную массу, восьмиканальный датчик положения, по два - на каждую из четырех измерительных осей, предварительные усилители, линейный преобразователь координат, блок коррекции, обратный преобразователь координат, распределитель сигналов и блок электромагнитных катушек, по две - на каждую из четырех измерительных осей, отличающийся тем, что предварительные усилители, линейный преобразователь координат и блок коррекции образуют входной блок, содержаний в каждом из трех каналов восемь первых резисторов, первый усилитель, второй, третий и четвертый резисторы, первый, второй и третий конденсаторы, а обратный преобразователь координат и распределитель сигналов образуют выходной блок, содержащий в каждом из четырех каналов четыре пятых резистора, второй усилитель, шестой, седьмой и восьмой резисторы, два транзистора, при этом первые выводы первых резисторов подключены к выходам датчика положения, вторые выводы четырех первых резисторов соединены с входом первого усилителя, вторые выводы других четырех первых резисторов соединены с инверсным входом первого усилителя и через последовательно соединенные первый конденсатор, второй и третий резисторы - с выходом первого усилителя, который соединен через третий конденсатор со своим инверсным входом, а точка, соединения второго и третьего резисторов подключена через последовательно соединенные второй конденсатор и четвертый резистор к общему проводу, первые выводы четырех пятых резисторов подключены соответственно к трем выходам входного блока и к общему проводу, вторые выводы двух пятых резисторов соединены с входом второго усилителя и через шестой резистор - с общим проводом, вторые выводы двух других пятых резисторов соединены с инверсным входом второго усилителя и через последовательно соединенные седьмой и восьмой резисторы подключены к общему проводу, выход второго усилителя соединен с базами двух транзисторов, коллекторы которых соединены через соответствующие электромагнитные катушки с источниками питания, а эмиттеры подключены к точке соединения седьмого и восьмого резисторов.
| ПРОСТРАНСТВЕННЫЙ АКСЕЛЕРОМЕТР С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1994 |
|
RU2082173C1 |
| RU 2064163 C1, 20.07.96 | |||
| МИКРОКОНТРОЛЛЕРНЫЙ УЛЬТРАЗВУКОВОЙ ГЕНЕРАТОР ДЛЯ СИСТЕМ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2013 |
|
RU2544865C2 |
| US 4891983 A, 09.01.90. | |||

