Изобретение относится к области гироскопического приборостроения, в частности к гироинтеграторам линейных ускорений (ГИ), и может быть использовано для измерения углов поворота, векторов линейной и угловой скорости и линейных ускорений движущегося объекта в бесплатформенных инерциальных навигационных системах.
Известны ГИ [1] измеряющие линейные скорости и ускорения действующие по оси чувствительности прибора, которые включают трехстепенной неуравновешенный гироскоп, систему межрамочной коррекции (СМРК), состояющую из последовательно соединенных датчика угла, закрепленного на оси подвеса, усилителя и датчика момента установленного на оси чувствительности, и датчик угла, расположенный на оси чувствительности. Недостатком известных ГИ является относительно невысокая точность измерения из-за наличия инструментальных и методических погрешностей, обусловленных боковыми составляющими линейного ускорения и перекрестными угловыми скоростями.
Известны гироскопические интеграторы угловых скоростей [2] измеряющие угол поворота и угловую скорость относительно оси чувствительности прибора, которые представляют собой двухстепенной гироскоп, включающий ротор, датчик угла и датчик момента, установленные на оси прецессии, и демпфер. Недостатком известных гироинтеграторов угловых скоростей, устанавливаемых непосредственно на движущийся объект, является то, что для получения информации о линейной скорости объекта, необходимо наличие ГИ, устанавливаемых на гиростабилизированную платформу.
Известны двухгироскопные ГИ [2] содержащие трехстепенной неуравновешенный гироскоп, включающий наружную рамку и чувствительный элемент (ЧЭ), в котором применены два гиромотора (ГМ) с одинаковыми конструктивными параметрами, соединенные спарником, причем векторы кинетических моментов гироскопов направлены в противоположные стороны, систему СМРК и датчик угла, расположенный на оси чувствительности прибора. Недостатком известных ГИ является существенная величина инструментальной погрешности, возникающей при повороте объекта вокруг оси чувствительности прибора. Поэтому ГИ не могут быть применены в бесплатформенных инерциальных навигационных системах. Для обеспечения требуемой точности измерения ГИ устанавливаются на гиростабилизированную платформу, что приводит к увеличению габаритов и веса системы.
Из известных устройств наиболее близким по технической сущности и достигаемому результату является устройство [3] содержащее два ГИ, оси чувствительности которых параллельны, а подвижные системы прецессируют в разные направления, и следующую систему с датчиками положения ГИ, которое может быть использовано в бесплатформенных инерциальных навигационных системах.
При действии вдоль оси чувствительности устройства линейного ускорения W и повороте объекта относительно этой оси с угловой скоростью  подвижные системы ГИ вращаются относительно корпуса устройства соответственно с угловыми скоростями
подвижные системы ГИ вращаются относительно корпуса устройства соответственно с угловыми скоростями
где  расчетная скорость вращения подвижных систем ГИ, соответствующая линейному ускорению, действующему вдоль оси чувствительности устройства;
расчетная скорость вращения подвижных систем ГИ, соответствующая линейному ускорению, действующему вдоль оси чувствительности устройства; отклонения угловых скоростей вращения подвижных систем соответственно первого и второго ГИ от расчетного значения, вызванные действием боковых составляющих линейного ускорения и перекрестными угловыми скоростями.
отклонения угловых скоростей вращения подвижных систем соответственно первого и второго ГИ от расчетного значения, вызванные действием боковых составляющих линейного ускорения и перекрестными угловыми скоростями.
В результате на выходе датчиков положения ГИ вырабатываются сигналы, пропорциональные линейной скорости V и углу поворота ψ объекта относительно оси чувствительности устройства.

где kДV, kДУ коэффициенты передачи датчиков положения ГИ по скорости и углу поворота соответственно.
Техническим недостатком известного устройства является низкая точность измерения из-за методических погрешностей, обусловленных производственными несовершенствами устройства при действии боковых составляющих линейного ускорения и перекрестных угловых скоростей.
Кроме того, известное устройство не определяет векторы линейной и угловой скоростей объекта.
Повышение точности путем уменьшения методических погрешностей устройства, возникающих вследствие производственных несовершенств устройства при действии боковых составляющих линейного ускорения и наличии перекрестных угловых скоростей, а также определение векторов линейной и угловой скоростей объекта достигается благодаря тому, что в предлагаемом устройстве дополнительно введены два измерителя линейной скорости и угла поворота, оси чувствительности которых ортогональны друг другу и оси чувствительности первого измерителя линейной скорости и угла поворота, последовательно соединенные дифференцирующий блок, блок формирования модуля, преобразователь напряжение- код, блок выработки сигналов коррекции и усилительно-преобразовательный блок, а также блок определения знака линейного ускорения и угловой скорости, вход которого подключен к второму выходу дифференцирующего блока, а выход к второму входу преобразователя напряжение-код, в каждый измеритель введен блок обработки информации, первый и второй выходы которого подключены к соответствующим входам преобразователя напряжение-код и дифференцирующего блока, а датчик положения каждого измерителя выполнен в виде двух статоров с обмотками и ротора, причем один из статоров закреплен на корпусе измерителя, другой статор установлен на оси чувствительности первого гироинтегратора, при этом выходы статорных обмоток подключены к соответствующим входам блока обработки информации, на оси подвеса одного из гироинтеграторов каждого измерителя установлен датчик момента, при этом входы датчиков момента соединены с соответствующими выходами усилительно-преобразовательного блока, в каждый гироинтегратор введен второй гиромотр, соединенный с первым гиромотором спарником и имеющий с ним одинаковые конструктивные параметры, причем векторы кинетических моментов гироскопов направлены в противоположные стороны.
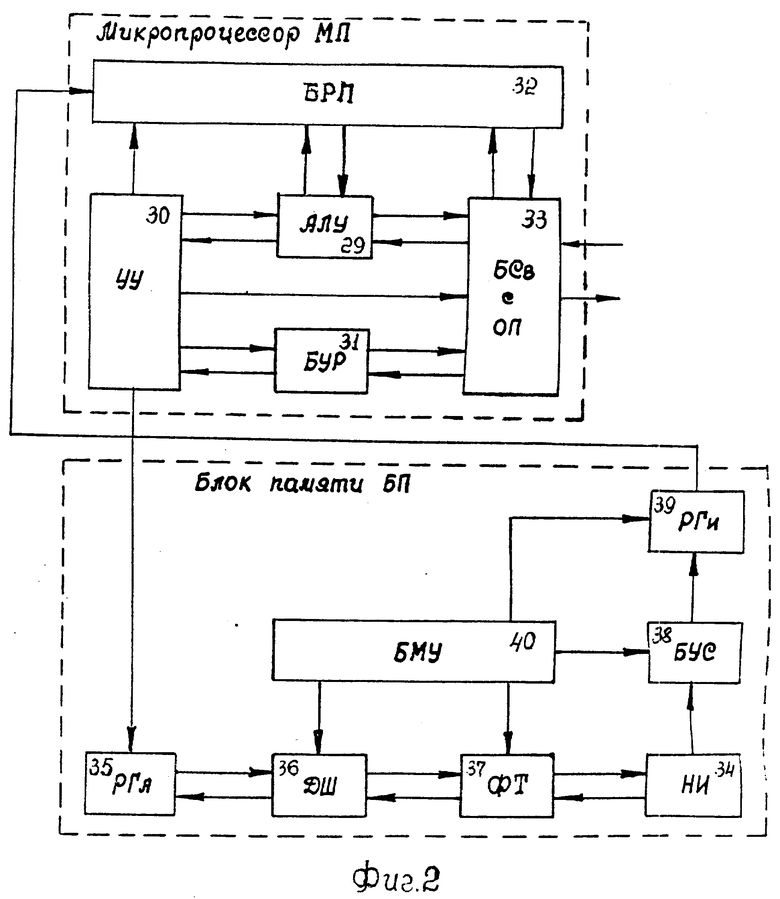
на фиг. 1 представлена принципиальная схема предлагаемого устройства для определения линейной и угловой скоростей и углов поворота движущегося объекта; на фиг.2 структурная схема блока выработки сигналов коррекции БВСК; на фиг. 3 графики зависимости погрешностей ГИ, ось чувствительности которого направлена по оси Y, от величин и знаков боковых составляющих линейного ускорения и отклонений масштабного коэффициента ГИ от его номинального значения; на фиг.4 графики зависимости погрешностей ГИ, ось чувствительности которого направлена по оси Y, от величин и знаков перекрестных угловых скоростей и отклонений масштабного коэффициента ГИ от его номинального значения.
При этом знаки вверху: "+" и "-" соответствуют положительному и отрицательному значениям погрешности масштабного коэффициента ГИ; знаки внизу: "+" и "-" перед индексом "К" соответствуют положительному и отрицательному значениям боковой составляющей линейного ускорения и составляющей перекрестной угловой скорости.
Устройство для определения линейной и угловой скоростей и углов поворота движущегося объекта содержит три измерителя линейной скорости и угла поворота ИСУ1,2,3, установленные по трем взаимоортогональным осям X, Y, Z, последовательно соединенные дифференцирующий блок (ДБ) 4, блок формирования модуля (БФМ) 5, преобразователь напряжение-код (ПНК) 6, блок БВСК 7, состоящий из микропроцессора (МП) 8 и блока памяти (БП) 9 и усилительно-преобразовательный блок (УПБ) 10, а также блок определения знака линейного ускорения и угловой скорости (БОЗ) 11, вход которого подключен к второму выходу блока ДБ, а выход к второму входу преобразователя ПНК. Каждый измеритель ИСУ1,2,3 включает последовательно расположенные соответственно по осям чувствительности X, Y, Z первый ГИ1, датчик 12 положения измерителя (ДП) и второй ГИ2, а также блок обработки информации (БОИ) 13 и датчик 14 момента ДМβ закрепленный на оси 15 подвеса ГИ1. Первые и вторые выходы блоков БОИx,y,z подключены к соответствующим входам преобразователя ПНК и блока ДБ, а выходы блока УПБ подключены к входам датчиков ДМβx,y,z.
Каждый ГИ содержит трехстепенной неуравновешенный гироскоп, состоящий из наружной рамки 16 и ЧЭ 17 и СМРК, состоящую из последовательно соединенных датчика 18 угла ДУβ, установленного на оси 15 подвеса, усилителя (V) 19 и датчика момента 20 (ДМ a), расположенного на оси чувствительности. ЧЭ включает два ГМ 21 и 22, соединенные спарником 23 и имеющие одинаковые конструктивные параметры, при этом векторы кинетических моментов гироскопов направлены в противоположные стороны.
Датчик ДП имеет два статора 24 и 25 с обмотками и ротор 26. Статор 24 закреплен на корпусе измерителя, статор 25 установлен на оси 27 чувствительности ГИ1, ротор 26 размещен на оси 28 чувствительности ГИ2, причем выходы статорных обмоток подключены к соответствующим входам блока БОИ.
Блок БОИ представляет собой электронный решающий усилитель (Полонников Д.Е. Решающие усилители, М. Энергия, 1973).
Блок ДБ может быть построен, например, на операционном усилителе с емкостью на входе и сопротивлением в цепи обратной связи (Бесекерский В.А. Попов Е.П. Теория систем автоматического регулирования, М. Наука, 1975).
Схема блока БФМ может, например, включать инвертор, компаратор и реле или усилители с диодами (Тетельбаум И.М. Шнейдер Ю.Р. 400 схем для АВМ, М. Энергия, 1978).
Блок БОЗ может быть выполнен, например, по схеме кольцевого диодного демодулятора (Шляндин В.М. Элементы автоматики и стчетно-решающие устройства, М. Машиностроение, 1967).
Преобразователь ПНК может быть, например, выполнен по принципу преобразователя цифровых вольтметров и включает электронные усилитель, интегратор и ключи, генератор тактовых импульсов, селекторы и триггеры (Коновалов С.Ф. и др. Гироскопические приборы, ч.3./под ред. Д.С.Пельпора, М. Высшая школа, 1980).
Микропроцессор МП программно-управляемое устройство обработки цифровой информации и управления, выполненное на базе интегральных схем, структурно состоящее из арифметическо-логического устройства (АЛУ) 29, управляющего устройства (УУ) 30, блока управляющих регистров (БУР) 31, блока регистровой памяти (БРП) 32 и блока связи (БС) 33, имеющего оперативную память (ОП) (Коган Б.М. Электронные вычислительные машины и системы, М. Энергоатомиздат, 1985).
Блок БП состоит из элементов памяти и логической схемы управления записью и считывания информации (Преснухин Л.Н. Нестеров П.В. Цифровые вычислительные машины, М. Высшая школа, 1981) и включает накопитель информации (НИ) 34, регистр адреса РГа 35, где записывается код адреса числа, дешифратор адреса (ДШ) 36, формирователь адресного тока ФТ 37, блок усилителей считывания (БУС) 38, предназначенный для усиления выходных сигналов НИ, выходной информационный регистр (РГи) 39 и блок местного управления (БМУ) 40, который осуществляет управление блоком БП.
Блок УПБ состоит из цифроаналогового преобразователя ЦАП, который преобразовывает кодовые сигналы коррекции, вырабатываемые блоком БВСК, в аналоговые управляющие сигналы и согласующего устройства СУ, осуществляющего согласование выходов преобразователя ЦАП с входами датчиков ДМβx,y,z
При движении объекта с линейным ускорением  и повороте объекта вокруг центра масс с угловой скоростью
и повороте объекта вокруг центра масс с угловой скоростью  на выходах блоков БОИx,y,z измерителей ИСУ1,2,3 появляются сигналы Uvx,y,z и Uψx,y,z, пропорциональные соответственно проекциям линейной скорости объекта на оси X, Y, Z, чувствительности измерителей ИСУ1,2,3 и углам поворота объекта отностительно осей X, Y, Z чувствительности измерителей ИСУ1,2,3.
на выходах блоков БОИx,y,z измерителей ИСУ1,2,3 появляются сигналы Uvx,y,z и Uψx,y,z, пропорциональные соответственно проекциям линейной скорости объекта на оси X, Y, Z, чувствительности измерителей ИСУ1,2,3 и углам поворота объекта отностительно осей X, Y, Z чувствительности измерителей ИСУ1,2,3.
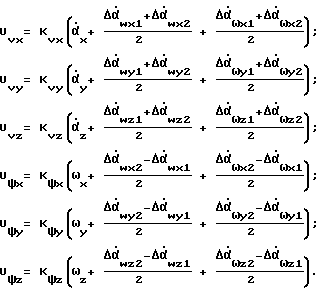
где Kvx,y,z и Kψx,y,z коэффициенты преобразования измерителей ИСУ1,2,3 соответственно по скорости и углу поворота; расчетные значения скоростей прецессии ГИ, пропорциональные проекциям Wx, Wy, Wz кажущегося линейного ускорения объекта на оси чувствительности измерителей ИСУ1,2,3 соответственно;
расчетные значения скоростей прецессии ГИ, пропорциональные проекциям Wx, Wy, Wz кажущегося линейного ускорения объекта на оси чувствительности измерителей ИСУ1,2,3 соответственно;
kμ масштабный коэффициент ГИ; отношения проекций кажущегося линейного ускорения объекта соответственно на оси X, Y, Z чувствительности измерителей ИСУ к величине ускорения силы тяжести;
отношения проекций кажущегося линейного ускорения объекта соответственно на оси X, Y, Z чувствительности измерителей ИСУ к величине ускорения силы тяжести; проекции угловой скорости объекта соответственно на оси X, Y, Z;
проекции угловой скорости объекта соответственно на оси X, Y, Z; погрешности первого и второго ГИ, входящих в измеритель ИСУ, возникающие из-за наличия производственных несовершенств ГИ при действии боковых составляющих линейного ускорения;
погрешности первого и второго ГИ, входящих в измеритель ИСУ, возникающие из-за наличия производственных несовершенств ГИ при действии боковых составляющих линейного ускорения; погрешности первого и второго ГИ, входящих в измеритель ИСУ, возникающие из-за наличия производственных несовершенств ГИ при наличии перекрестных угловых скоростей;
погрешности первого и второго ГИ, входящих в измеритель ИСУ, возникающие из-за наличия производственных несовершенств ГИ при наличии перекрестных угловых скоростей;
εwkmi(nm),εwkmi(ωm) относительные погрешности ГИ, обусловленные соответственно действием боковых составляющих линейного ускорения и перекрестными угловыми скоростями, являющиеся функциями соответственно величин nx,y,z и ωx,y,z,
εwkmi= kwkmi•nm;εwkmi= kwkmi•ωm,
K X, Y, Z; m X, Y, Z, причем K ≠ m; i 1, 2 номер ГИ, входящего в измерительную пару.
Сигналы Uvx,y,z и Uψx,y,z поступают на входы блока ДБ, который осуществляет дифференцирование выходных сигналов Uvx,y,z и Uψx,y,z измерителей ИСУ1,2,3. В результате на выходе блока ДБ появляются сигнал Uwx, Uwy, Uwz и Uωx,Uωy,Uωz, пропорциональные соответственно проекциям Wx, Wy, Wz линейного ускорения движущегося объекта на оси X, Y, Z чувствительности измерителей ИСУ1,2,3 и проекциям ωx,ωy,ωz угловой скорости поворота объекта относительно центра масс на оси X, Y, Z.
Сигналы Uvx,y,z и Uωx,y,z через преобразователь ПНК поступают на входы блока БВСК, где в результате вычислений определяются векторы линейной и угловой скоростей движущегося объекта, т.е. рассчитываются их модули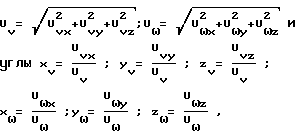
образуемые векторами линейной и угловой скоростей объекта с положительными направлениями соответственно осей X, Y, Z.
С выходов блока ДБ сигналы Uwx,y,z и Uωx,y,z поступают на входы блока БФМ и блока БОЗ. Используя выходные сигналы блока ДБ, блок БФМ вырабатывает сигналы, пропорциональные абсолютным величинам проекций линейного ускорения объекта и угловой скорости поворота объекта относительно центра масс на оси X, Y, Z, а блок БОЗ формирует сигналы, характеризующие направление линейных ускорений, действующих вдоль осей X, Y, Z, и угловых скоростей поворота объекта относительно осей X, Y, Z (т.е. определяет знаки величин Wx, Wy, Wz и ωx,ωy,ωz
Выходные сигналы блока БФМ и блока БОЗ подаются соответственно на первый и второй входы преобразователя ПНК. После преобразования в преобразователе ПНК выходных сигналов блока БФМ и блока БОЗ на выходах преобразователя ПНК появляются соответствующие кодовые сигналы, которые имеют определенный код в зависимости от выходных сигналов блока БФМ и блока БОЗ. Коды сигналов блока БФМ пропорциональны соответствующим величинам проекций линейного ускорения объекта и угловой скорости поворота объекта относительно центра масс на оси X, Y, Z, а код каждого сигнала блока БОЗ может иметь два значения, соответствующие положительному и отрицательному значению действующих линейных ускорений Wx, Wy, Wz и угловых скоростей ωx,ωy,ωz
В блоке БП записываются программы выработки сигналов коррекции и вычисления модулей Uv, Uω векторов линейной и угловой скоростей объекта и углов Xw, Yw, Zw и xω,yω,zω, образуемых векторами линейной и угловой скоростей объекта с положительными направлениями соответственно осей X, Y, Z, постоянные величины kДБ, ky, kДМβ - коэффициенты передачи соответственно блоков ДБ, УПБ и датчика ДМβ, H - величина кинетического момента, коэффициенты kμ Kvx,y,z, Kψx,y,z а также значения погрешностей εwkmi и εωkmi ГИ в зависимости от знаков боковых составляющих линейного ускорения, перекрестных угловых скоростей, величин и знаков отклонения масштабного коэффициента ГИ от его номинального значения, определенные аналитически.
Таким образом, в блоке БП для каждого конкретного ГИ из шести, входящих в устройство, помещены массивы, в которых каждому положительному и отрицательному значению (в диапазоне возможных изменений) боковых составляющих линейного ускорения и перекрестных составляющих угловой скорости соответствуют значения погрешностей εwkmi и εωkmi.
Кодовые сигналы преобразователя ПНК поступают в БВСК.
Уменьшение погрешностей  происходит следующим образом.
происходит следующим образом.
Устройство УУ в соответствии с программой выработки сигналов коррекции извлекает из блока БП постоянные величины KДБ, KУ, KДМβ,  , H, Kvx,y,z, Kψx,y,z, а из блока БРП входные величины Uwx, Uwy, Uwz и Uωx,Uωy,Uwz и осуществляет передачу указанных величин в устройство АЛУ, где определяются величины
, H, Kvx,y,z, Kψx,y,z, а из блока БРП входные величины Uwx, Uwy, Uwz и Uωx,Uωy,Uwz и осуществляет передачу указанных величин в устройство АЛУ, где определяются величины
Затем устройство УУ по величинам  и соответствующим им кодам знака для каждой составляющей линейного ускорения и угловой скорости определяет ячейки, в которых записаны величины погрешностей εwkmi и εωkmi, соответствующие данным характеристикам составляющих линейного ускорения и угловой скорости объекта и параметрам каждого из шести ГИ и считывает величины εwkmi и εωkmi для каждого из шести ГИ в устройство АЛУ, в котором вычисляются сигналы коррекции
и соответствующим им кодам знака для каждой составляющей линейного ускорения и угловой скорости определяет ячейки, в которых записаны величины погрешностей εwkmi и εωkmi, соответствующие данным характеристикам составляющих линейного ускорения и угловой скорости объекта и параметрам каждого из шести ГИ и считывает величины εwkmi и εωkmi для каждого из шести ГИ в устройство АЛУ, в котором вычисляются сигналы коррекции
Из блока БВСК сигналы коррекции Syz, Sxz, Sxy поступают в блок УПБ, где формируются соответствующие управляющие сигналы, которые поступают соответственно на входы датчиков ДМβx,y,z измерителей ИСУ1,2,3. Датчики ДМβx,y,z/ создают моменты, под действием которых подвижная система ПС ГИ1 в измерителях ИСУ1,2,3 прецессирует в направлениях, противоположных вращению ПС ГИ измерителей ИСУ1,2,3 от действия боковых составляющих линейного ускорения и перекрестных угловых скоростей, со скоростями 
В результате на выходах БОИx,y,z измерителей ИСУ1,2,3 появляются сигналы
 погрешности измерения составляющих линейной скорости и углов поворота объекта, обусловленные боковыми составляющими линейного ускорения и перекрестными угловыми скоростями до их компенсации;
погрешности измерения составляющих линейной скорости и углов поворота объекта, обусловленные боковыми составляющими линейного ускорения и перекрестными угловыми скоростями до их компенсации;
С учетом выражений для  получим
получим
где  погрешности измерения составляющих линейной скорости, обусловленные боковыми составляющими линейного ускорения и перекрестными угловыми скоростями после их компенсации;
погрешности измерения составляющих линейной скорости, обусловленные боковыми составляющими линейного ускорения и перекрестными угловыми скоростями после их компенсации;
Т. к. коэффициенты kwkmi и kωkmi значительно меньше 1, то их произведения, например, kwzyi•kwxzi, kωyxi• kwxyi, kωzyi•kωxzi и т.д. будут малыми второго порядка по сравнению с величинами kwkmi и kωkmi/ . Следовательно,  , т.е. после компенсации погрешность измерения линейной скорости существенно снижается.
, т.е. после компенсации погрешность измерения линейной скорости существенно снижается.
Погрешности измерения углов поворота объекта после проведенной компенсации имеют две составляющие
Для повышения точности определения углов поворота объекта вычисляются поправки ,
,
которые вводятся в соответствующие выходные сигналы ИСУ1,2,3, пропорциональные углам поворота объекта
Тогда 
где  погрешности измерения углов поворота объекта, обусловленные боковыми составляющими линейного ускорения и перекрестными угловыми скоростями объекта после их компенсации;
погрешности измерения углов поворота объекта, обусловленные боковыми составляющими линейного ускорения и перекрестными угловыми скоростями объекта после их компенсации;
 погрешность обусловлена тем, что при вычислении поправок
погрешность обусловлена тем, что при вычислении поправок  вместо значений
вместо значений  подставляются соответственно величины
подставляются соответственно величины  при этом значения
при этом значения  берутся из предыдущего такта.
берутся из предыдущего такта.
По сравнению с известным устройством для измерения линейной скорости и угла поворота в предлагаемом устройстве благодаря тому, что дополнительно введены два измерителя линейной скорости и угла поворота, оси чувствительности которых ортогональны друг другу и оси чувствительности первого измерителя линейной скорости и угла поворота, последовательно соединенные дифференцирующий блок, блок формирования модуля, преобразователь напряжение-код, блок выработки сигналов коррекции и усилительно-преобразовательный блок, а также блок определения знака линейного ускорения и угловой скорости, вход которого подключен к второму выходу дифференцирующего блока, выход к второму входу преобразователя напряжение-код, в каждый измеритель введен блок обработки информации, первые и вторые выходы которых подключены к соответствующим входам преобразователя напряжение-код и дифференцирующего блока, а датчик положения измерителя выполнен в виде двух статоров с обмотками и ротора, причем один из статоров закреплен на корпусе измерителя, другой статор установлен на оси чувствительности первого гироинтегратора, а ротор размещен на оси чувствительности второго гироинтегратора, при этом выходы статорных обмоток подключены к соответствующим входам блока обработки информации, на оси подвеса одного из гироинтеграторов каждого измерителя установлен датчик момента, при этом входы датчиков момента соединены с соответствующими выходами усилительно-преобразовательного блока, в каждый гироинтегратор введен второй гиромотор, соединенный с первым гиромотором спарником и имеющий с ним одинаковые конструктивные параметры, причем векторы кинетических моментов гироскопов направлены в противоположные стороны, повышается точность измерения линейной скорости и углов поворота объекта более чем в 10 раз, что подтверждается расчетами, а также расширяются функциональные возможности появляется возможность определения вектора угловой скорости движущегося объекта.
В настоящее время на предприятии заявителе производится разработка предлагаемого устройства для измерения линейной скорости и угла поворота и после изготовления, исследований и испытаний макета предполагается использование в перспективных разработках 1996 г.
Пользуясь сведениями, представленными в материалах заявки, и используя существующую элементную базу и технологию, предлагаемое устройство без особых технических трудностей может быть реализовано в производстве, что характеризует его как промышленно применимое.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП С ОПТИЧЕСКИМ СЧИТЫВАНИЕМ ПОЛОЖЕНИЯ ОСИ РОТОРА | 1994 |
|
RU2104491C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВОГО ДВИЖЕНИЯ | 2001 |
|
RU2206899C1 |
| ПРОСТРАНСТВЕННЫЙ АКСЕЛЕРОМЕТР С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1997 |
|
RU2138823C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 1992 |
|
RU2046343C1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА | 1990 |
|
RU2068984C1 |


Использование: в гироскопическом приборостроении в бесплатформенных инерциальных навигационных системах. Сущность изобретения: устройство для определения линейной и угловой скоростей и углов поворота движущегося объекта содержит три измерителя линейной скорости и угла поворота, оси чувствительности которых ортогональны друг другу, последовательно соединенные дифференцирующий блок, блок формирования модуля, преобразователь напряжение-код, блок выработки сигналов коррекции и усилительно-преобразовательный блок, а также блок определения знака линейного ускорения и угловой скорости, вход которого подключен к второму выходу дифференцирующего блока, а выход - ко второму входу преобразователя напряжение-код, каждый измеритель включает последовательно расположенные по оси чувствительности измерителя первый гироинтегратор линейных ускорений, датчик положения измерителя и второй гироинтегратор линейных ускорений, а также блок обработки информации, первый и второй выходы которого подключены к соответствующим входам преобразователя напряжение-код и дифференцирующего блока, при этом датчик положения измерителя выполнен в виде двух статоров с обмотками и ротора, причем один из статоров закреплен на корпусе измерителя, другой статор установлен на оси чувствительности первого гироинтегратора, а ротор размещен на оси чувствительности второго гироинтегратора, при этом выходы статорных обмоток подключены к соответствующим входам блока обработки информации, на оси подвеса одного из гироинтеграторов каждого измерителя установлен датчик момента, причем входы датчиков момента соединены с соответствующими выходами усилительно-преобразовательного блока. Каждый гироинтегратор содержит трехстепенный неуравновешенный гироскоп, включающий чувствительный элемент и систему межрамочной коррекции. Чувствительный элемент каждого гироинтегратора включает два гиромотора, соединенные спарником и имеющие одинаковые конструктивные параметры, при этом векторы кинетических моментов гироскопов направлены в противоположные стороны. 4 ил.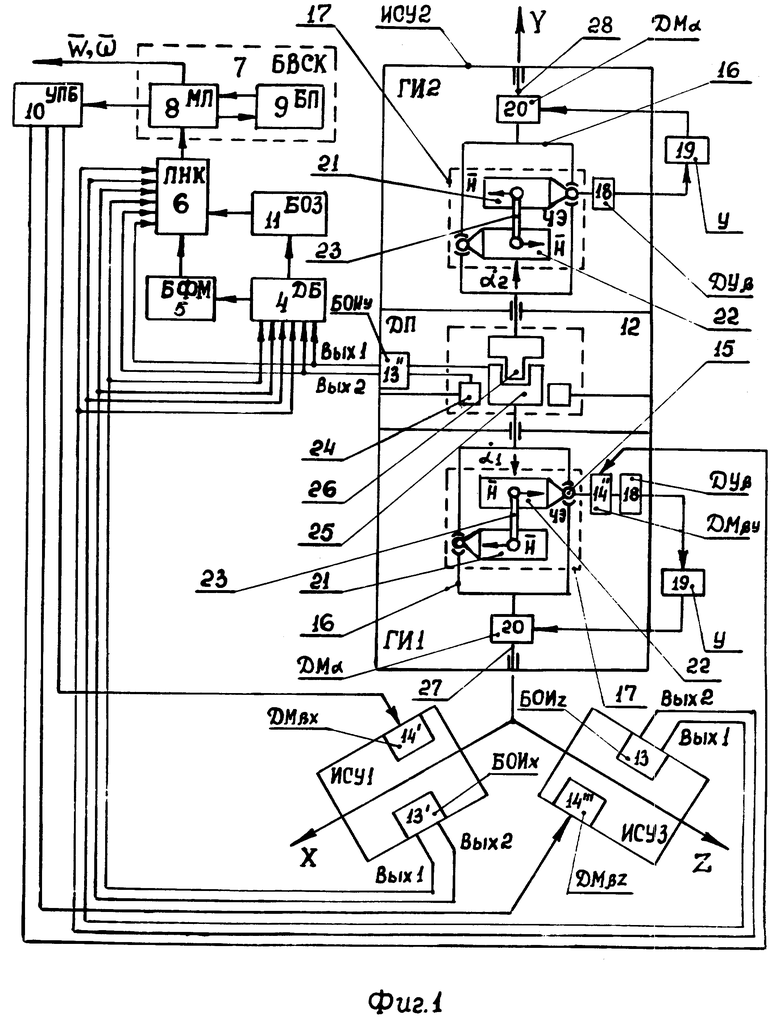
Устройство для определения линейной и угловой скоростей и углов поворота движущегося объекта, содержащее измеритель линейной скорости и угла поворота, в котором по оси чувствительности расположены два гироинтегратора линейных ускорений, прецессирующие в разных направлениях, и датчик положения измерителя, отличающееся тем, что в него дополнительно введены два измерителя линейной скорости и угла поворота, оси чувствительности которых ортогональны одна другой и оси чувствительности первого измерителя линейной скорости и угла поворота, последовательно соединенные дифференцирующий блок, блок формирования модуля, преобразователь напряжение код, блок выработки сигналов коррекции и усилительно-преобразовательный блок, а также блок определения знака линейного ускорения и угловой скорости, вход которого подключен к второму выходу дифференцирующего блока, а выход к второму входу преобразователя напряжение код, в каждый измеритель введен блок обработки информации, первый и второй выходы которого подключены к соответствующим входам преобразователя напряжение код и дифференцирующего блока, а датчик положения каждого измерителя выполнен в виде двух статоров с обмотками и ротора, причем один из статоров закреплен на корпусе измерителя, другой статор установлен на оси чувствительности первого гироинтегратора, а ротор размещен на оси чувствительности второго гироинтегратора, при этом выходы статорных обмоток подключены к соответствующим входам блока обработки информации, на оси подвеса одного из гироинтеграторов каждого измерителя установлен датчик момента, при этом входы датчиков момента соединены с соответствующими выходами усилительно-преобразовательного блока, в каждый гироинтегратор введен второй гиромотор, соединенный с первым спарником и имеющий с ним одинаковые конструктивные параметры, причем векторы кинетических моментов гироскопов направлены в противоположные стороны.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коновалов С.Ф., Никитин Е.А., Селиванова Л.М | |||
| Гироскопические системы | |||
| Акселерометры, датчики угловой скорости, интегрирующие гироскопы и гироинтеграторы | |||
| - М.: Высшая школа, 1980, ч.30, с.103 - 114 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Развитие механики гироскопических и инерциальных систем | |||
| - М.: Наука, 1973, с.140 - 149 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 146057, кл.G 01C 19/42, 1961. | |||
