Изобретение относится к электротехнике и может быть использовано для управления электроприводами постоянного тока.
Известен ряд электроприводов [1], включающих устройство задания и частотно-фазовый дискриминатор, к выходу которого через силовой ключ подключена якорная обмотка двигателя, на валу которого установлен частотный датчик частоты вращения, выходная обмотка которого подсоединена через устройство коррекции ко второму входу частотно-фазового дискриминатора и образует замкнутый контур фазовой синхронизации. Такие электроприводы обеспечивают высокие точностные характеристики, однако требуют применения большого числа электронных компонент, а для их настройки необходимо проводить большой объем наладочных работ. Для устранения опрокидывания регулирования при нарушении последовательности чередования импульсов задания и обратной связи в таких электроприводах используются частотно-фазовые дискриминаторы, исключающие это явление и создающие эффект насыщения, аналогичный режиму, возникающему в системах электропривода при больших отклонениях.
Наиболее близким к предлагаемому устройству является электропривод постоянного тока [2], функциональная схема которого представлена на фиг. 1.
Электропривод содержит микроконтроллер 1, содержащий центральный процессор, память программ и память данных, соединенных через шину управления 2. К шине управления 2 подключается делитель 3, выход которого подключен к входу прерывания микроконтроллера 1. Через шину управления 2 и порт вывода 4 микроконтроллер 1 осуществляет управление силовым преобразователем 5, подключенного к источнику питания 6 и выполненного по мостовой схеме на транзисторах 7-10. В диагональ моста включена якорная обмотка двигателя постоянного тока 11, на валу которого установлен датчик скорости 12, выход которого через преобразователь 13 числа импульсов датчика 12 в цифровой код, соединен с шиной управления 2. Преобразователь 12 содержит формирователь прямоугольных импульсов. Получаемый на его выходе цифровой код пропорционален скорости двигателя 11. Электропривод представляет собой цифровую систему стабилизации скорости двигателя 11 путем изменения длительности широтно-импульсного сигнала управления силовым преобразователем 5. Время подключения якорной обмотки двигателя 11 к источнику питания 6 определяется микроконтроллером 1 с помощью программных средств. Для получения длительности сигнала управления двигателем 11, изменяющейся в пределах (0-100) % периода частоты переключения силового преобразователя 5 используется делитель 3, подключаемый при очень малых или близких к периоду частоты переключения силового преобразователя 5 длительностях сигнала управления двигателем 11. Это делается для компенсации запаздывания, свойственного методам получения широтно-импульсного сигнала программными средствами из-за ограниченного быстродействия микроконтроллера 1. Как и в большинстве компенсационных цифровых систем управления, в которых частота или длительность сигналов, получаемых с импульсных датчиков скорости, преобразуется в цифровой код, в описанное устройство [2] квантование сигнала, пропорционального скорости двигателя 11, приводит к появлению неконтролируемой ошибки ее поддержания, равной разрешающей способности преобразователя 13. Увеличение разрешающей способности преобразователя 13 приводит к усложнению устройства или росту времени измерения скорости, что, в свою очередь, снижает точность ее стабилизации.
Технический результат предлагаемого изобретения заключается в увеличении точности стабилизации скорости двигателя постоянного тока при одновременном снижении затрат на оборудование. Для реализации этого в известное устройство [2] входят генератор задающей частоты, делитель и триггерная схема с раздельными динамическими входами. В состав микроконтроллера входят два таймера. При этом генератор задающей частоты подключен к третьему входу микроконтроллера, второй и третий выходы которого соединены с первым и вторым входами силового преобразователя, обеспечивая согласованное управление транзисторами первым и вторым плечами силового преобразователя. Первый выход микроконтроллера, являющийся выходом строба приема адреса, через делитель подключен ко второму входу триггерной схемы и второму входу микроконтроллера, являющегося входом управления внешним прерыванием 0. Выход датчика скорости через формирователь прямоугольных импульсов соединен с первым входом триггерной схемы, выход которой связан с первым входом микроконтроллера. При этом триггерная схема выявляет величину фазового рассогласования между частотными сигналами, поступающими с делителя и датчика скорости. Один из встроенных в микроконтроллер таймеров осуществляет времяимпульсное преобразование длительности выходного сигнала триггерной схемы в цифровой код, который в соответствии с принятым законом управления преобразуется с помощью второго таймера микроконтроллера в длительность импульса управления силовым преобразователем. Кроме того, микроконтроллер обеспечивает логическую защиту от опрокидывания регулирования при нарушении последовательности чередования импульсов с делителя и датчика скорости.
В качестве микроконтроллера может быть использован практически любой однокристальный микроконтроллер, предназначенный для использования в локальных регуляторах, например, КР1816ВЕ51 или любой из его аналогов.
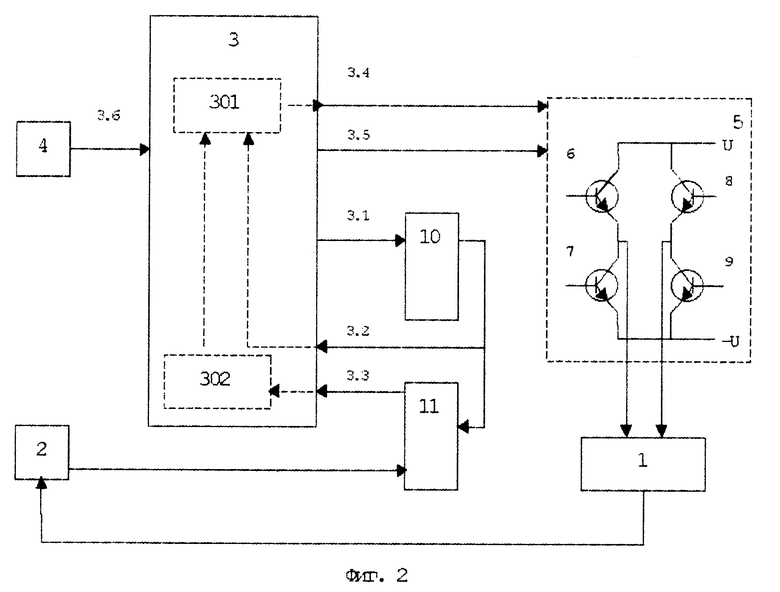
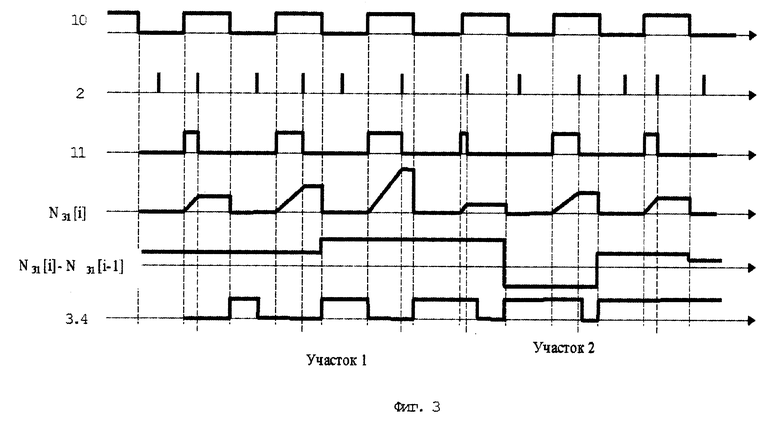
На фиг. 2 приведена функциональная схема электропривода; на фиг. 3 - временные диаграммы, поясняющие его работу, где цифрами указаны выходы соответствующих элементов устройства.
Электропривод содержит двигатель 1 постоянного тока, на валу которого установлен датчик 2 скорости. Для управления скоростью двигателя 1 используется микроконтроллер 3, к третьему входу которого подключен генератор 4 задающей частоты. Второй (3.4) и третий (3.5) выходы микроконтроллера 3 соединены с первым и вторым силового преобразователя 5, выполненного по мостовой схеме на транзисторах 6-9, в диагональ которого включена якорная обмотка двигателя 1. Первый выход микроконтроллера - (3.1), являющийся выходом строба приема адреса связан с делителем 10, выход которого подключен к второму входу триггерной схемы 11 и вторым входом микроконтроллера (3.2), управляющего внешним прерыванием. Выход датчика 2 скорости через формирователь прямоугольных импульсов 12 связан с первым входом триггерной схемы 11, выход которой подключен к первому входу (3.3) микроконтроллера 3. Таймеры 302 и 301, интегрированные в кристалл микроконтроллера 3 переключаются с частотой следования импульсов строба приема адреса. Управление вторым таймером 301 осуществляется сигналом на первом входе микроконтроллера 3. Выход таймера 302 соединен с вторым выходом микроконтроллера 3 (3.4).
Электропривод работает следующим образом.
Основной идеей построения электропривода является использование принципа фазовой синхронизации частотных сигналов задания и обратной связи, обеспечивающего малую погрешность поддержания скорости и высокую стабильность характеристик. Для этого в электроприводе используется высокостабильный генератор 4 задающей частоты, подключенный к третьему входу микроконтроллера 3 и генерирующий импульсы с частотой следования f4. При работе микроконтроллера 3 на выходе строба приема адреса (3.1) вырабатывается сигнал с частотой f3.1, определяемой как
f3.1=f4/12 (1)
Делитель 10 с коэффициентом пересчета К10 предназначен для задания скорости двигателя 1. Частота выходного сигнала датчика 2 скорости Ω двигателя 1 (f2) определяется как
где z - число меток датчика 2 скорости.
На выходе формирователя 12 формируются прямоугольные импульсы частоты f2 с уровнями логического "нуля" и "единицы", необходимых для обеспечения работы логических элементов устройства.
В установившемся режиме работы частоты сигналов с выходов делителя 10 - f10 и датчика 2 скорости равны, а следовательно, уровень скорости двигателя 1 определяется как
В этом случае, показанном на фиг. 3 (участок 1) частота с формирователя 12 в два раза дольше выходной частоты делителя 10. При этом фронт импульса с делителя 10 устанавливает на выходе триггерной схемы 11 сигнал высокого уровня, что разрешает работу таймера 301, управляемого через первый вход микроконтроллера (3.3). Фронт сигнала с формирователя 12 производит сброс триггерной схемы 11, что приводит к появлению сигнала низкого уровня на входе 3.3 микроконтроллера 3, а следовательно, запрещает работу второго таймера 301. За время действия этого импульса Т11 на вход таймера 301 проходит N13 импульсов, число которых определяется как
N13[i]=T11f3.1. (4)
Эта величина пропорциональна величине фазового рассогласования частотных сигналов с делителя 10 и датчика 2 скорости двигателя 1, а следовательно, как показано в [1], соответствует величине интеграла от ошибки регулирования скорости. Поэтому в устройстве обеспечивается идеальный астатизм по скорости двигателя 1, а погрешность стабилизации ее среднего значения равна нулю.
При спаде импульса делителя 10 триггерная схема сохраняет низкий уровень сигнала на своем выходе. В этот момент микроконтроллер 3 переходит в режим обработки прерывания. При этом считывается содержимое второго таймера 301, а он программно сбрасывается в исходное состояние. Затем вычисляется длительность сигнала управления двигателем 1 по выражению:
NU=N13[i]-0,5K10. (5)
Применение выражения (5) для вычисления длительности широтно-импульсного сигнала управления силовым преобразователем 5 позволяет изменять знак напряжения на якорной обмотке двигателя 1, что увеличивает быстродействие устройства.
После обработки в соответствии выбранным законом формирования управляющей работой двигателя 1 переменной ее величина заносится в первый таймер 302 микроконтроллера 3, запуск которого производится по спаду импульса с выхода делителя 10. Сигнал, соответствующий знаку NU (низкого уровня при NU<0 или высокого уровня при NU>0) поступает на третий выход 3.5 микроконтроллера 3, соединенного с вторым выходом силового преобразователя 5. При достижении нулевого значения первого таймера 302 на выходе 3.4 микроконтроллера 3 устанавливается сигнал низкого уровня, который переводит двигатель 1 в режим торможения.
Следующий импульс с датчика 2 скорости не изменяет состояние триггерной схемы 11, так как сигнал на ее выходе имеет низкий уровень. С появлением очередного фронта с выхода делителя 10 цикл работы устройства повторяется.
При уменьшении скорости Ω двигателя 1 происходит увеличение длительности широтно-импульсного сигнала Т11 на выходе триггерной схемы 11, а следовательно, и заносимого в первый таймер 302 микроконтроллера 3 числа и, как следствие этого, увеличение длительности поступающего на двигатель 1 сигнала с силового преобразователя 5. Следовательно, скорость двигателя 1 будет стремиться восстановить свое искомое значение.
В процессе формирования управляющего работой двигателя 1 сигнала анализируется разность N31[i] текущего и N31[i-1] предшествующего значений для выявления нарушения последовательности чередования импульсов, что, как известно, приводит к опрокидыванию регулирования скорости двигателя 1.
При значительном отклонении скорости двигателя от заданного значения нарушается последовательность чередования импульсов с делителя 10 и датчика 2 скорости (фиг. 3 участок 2). При возникновении такой ситуации резко меняется величина и знак фазового рассогласования сравниваемых частот, а следовательно, и записываемого во второй таймер 301 микроконтроллера 3 числа. Как только разность считываемых с таймера 301 чисел на соседних периодах частоты f10 станет больше, чем 0,5К10 микроконтроллер 3 заносит в таймер 302 значение, равное коэффициенту пересчета делителя 10. Это соответствует максимальному напряжению, подаваемому на двигатель 1. Такое состояние сохраняется до тех пор, пока модуль разности сравниваемых частот, считываемых со второго таймера 301 микроконтроллера, не станет большим 0,5К10. Такой алгоритм работы микроконтроллера по анализу двух соседних значений величин фазовых рассогласований, снимаемых с выхода триггерной схемы 11 обеспечивает постоянную величину длительности широтно-импульсного сигнала управления силовым преобразователем 5 при значительных отклонениях скорости двигателя 1 от задаваемого значения. Это обеспечивает защиту от опрокидывания регулирования при нарушении последовательности чередования импульсов входных частот, то есть достигается эффект насыщения, аналогичный режиму, возникающему в системах электропривода с аналоговым и цифровым управлением при больших отклонениях.
Таким образом, предлагаемое устройство обеспечивает высокое быстродействие в переходных режимах, а погрешность стабилизации скорости определяется характеристиками генератора 4 задающей частоты. Электропривод конструктивно прост и не содержит элементов, которые требуют настройки при изготовлении и в процессе эксплуатации. По сравнению с прототипом предлагаемое устройство содержит меньшее число элементов и характеризуется практически нулевой ошибкой стабилизации среднего значения скорости двигателя.
Источники информации
1. Трахтенберг Р.М. Импульсные астатические системы электропривода с дискретным управлением. - М.: Энергоатомиздат, 1982.
2. Патент US N 4638225 H 02 P 5/06. Methods and apparatus therefor in motor speed control. 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2258297C2 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| ЭЛЕКТРОПРИВОД | 1996 |
|
RU2127940C1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| Электропривод | 1987 |
|
SU1434532A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2260897C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2001 |
|
RU2185019C1 |
| Электропривод постоянного тока | 1985 |
|
SU1272452A1 |
Изобретение относится к системам стабилизации скорости вращения двигателей постоянного тока. Технический результат заключается в повышении точности стабилизации скорости двигателя постоянного тока. Для достижения поставленной цели в известное устройство введены генератор задающей частоты и триггерная схема с раздельными динамическими входами, а входящий в устройство микроконтроллер содержит два встроенных таймера, один из которых используется для проведения преобразования длительности широтно-импульсного сигнала фазового рассогласования импульсов с датчика скорости и делителя в цифровой код, а второй - для изменения длительности импульса управления двигателем. Программные средства микроконтроллера обеспечивают регулирование частоты вращения двигателя, формирование закона переключения транзисторов силового преобразования и логическую защиту от опрокидывания регулирования при нарушении последовательности чередования импульсов с делителя и датчика скорости. 3 ил.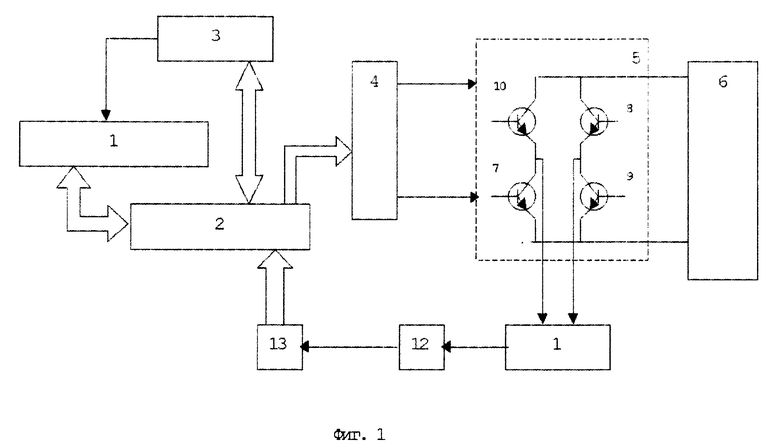
Электропривод, содержащий датчик скорости, расположенный на валу двигателя постоянного тока, якорная обмотка которого включена в диагональ моста транзисторного силового преобразователя, входы которого соединены с выходами микроконтроллера, обеспечивающего регулирование частоты вращения и формирование закона переключения транзисторов силового преобразователя, отличающийся тем, что в него введены генератор задающей частоты, триггерная схема с раздельными динамическими входами и счетчик импульсов, выход которого подключен к первому входу микроконтроллера, выход датчика скорости соединен с первым входом триггерной схемы, выход которой соединен с вторым входом микроконтроллера, к третьему входу которого подключен генератор задающей частоты, а второй вход триггерной схемы связан с выходом счетчика импульсов, вход которого соединен с первым выходом микроконтроллера, который содержит два встроенных таймера, причем длительность сигнала с выхода триггерной схемы преобразуется в код с помощью первого таймера, вход управления которого связан с вторым входом микроконтроллера, обеспечивающего дополнительно логическую защиту от опрокидывания регулирования при нарушении последовательности чередования импульсов со счетчика импульсов и датчика скорости.
| US 4638225 A, 20.01.87, SU 1411910 A, 05.01.87 | |||
| Электропривод | 1987 |
|
SU1434532A1 |
| Электропривод | 1988 |
|
SU1564707A1 |

