11
Изобретение относится к измерительной технике и используется для измерения угловых перемещений, например, в машиностроении для контроля угловых перемещений рабочих органов металлорежущих станков.
Цепь изобретения - повьшение точности измерений путем увеличения чувствительности датчика, что достигается увеличением градиента магнитной проводимости в зазоре между подвижной и неподвижной частями датчика.
На фиг, 1 показано схематично конструктивное выполнение датчика угловых перемещений; на фиг, 2 - сечение А-А на фиг, 1,
Датчик угловых перемещений содержит неподвижный магнитопровод I, на выступах которого размещены магнито- чувствительные элементы (fЧЭ) 2 и 3, например магниторезисторы, включенные по мостовой схеме измерения (ие показана). В зазоре между выступами магнитопровода 1 установлен ферромагнитный ротор 4 с закрепленным на нем постоянным магнитом 5, В процессе измерения ротор А кинематически связывается с объектом контроля. Магнит 5, намагниченный радиально, установлен на оси ротора и выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда, и имеет продольное сечение в виде равнобедренной трапеции,меньшее основание которой расположено в области участков спирали Архимеда с наибольшим радиусом кривизны.
Датчик угловых перемещений работает следующим образом.
При повороте ротора 4 изменяются величины зазоров между постоянным магнитом 5 ротора и МЧЭ 2 и 3 датчика. Величина зазора между одним из МЧЭ, например 2, и магнитом 5 умень- щается, а его площадь увеличивается.
02
а между другим МЧЭ, например 3, и магнитом 5 зазор увеличивается, а его площадь уменьшается вследствие чего изменяется магнитная проводимость этих зазоров в области размещения МЧЭ во взаимно противоположных направлениях. Изменение проводимости воздушных зазоров, а следовательно, и магнитных потоков, проходящих через МЧЭ, в зависимости от угла поворота ротора А вызывает изменение сигналов на их выходах, например изменение сопротивления магниторезисто- ров, происходящее линейно в зависимости от угла поворота ротора А, Благодаря особенностям конструктивного выполнения постоянного магнита 5 обеспечиваются увеличение градиента магнитной проводимости, а следовательно, более интенсивное изменение сигнала на выходе датчика, что повышает его чувствительность и точность измерения угла поворота.
25
Формула изобретения
Датчик угловых перемещений, содержащий неподвижный магнитопровод с выступами, размещенные на. них магниточувствительные элементы и установенный в зазоре между выступами магнитопровода ферромагнитный ротор с закрепленным на нем постоянным магнитом, отличающийся, тем,
что, с целью повышения точности измерений путем увеличения чувствительности датчика, постоянный магнит установлен на оси ротора, намагничен радиально, выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали рхимеда, и имеет продольное сечение в виде равнобедренной трапеции, меньшее основание которой расположено в области участка спирали Архимеа с наибольшим радиусом кривизны.
Редактор Л. Козориз
Составитель Т. Бычкова Техред М.Ходанич
Заказ 2344/Д2Тираж 677Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, А
Фи2.2
Корректор Г. Решетник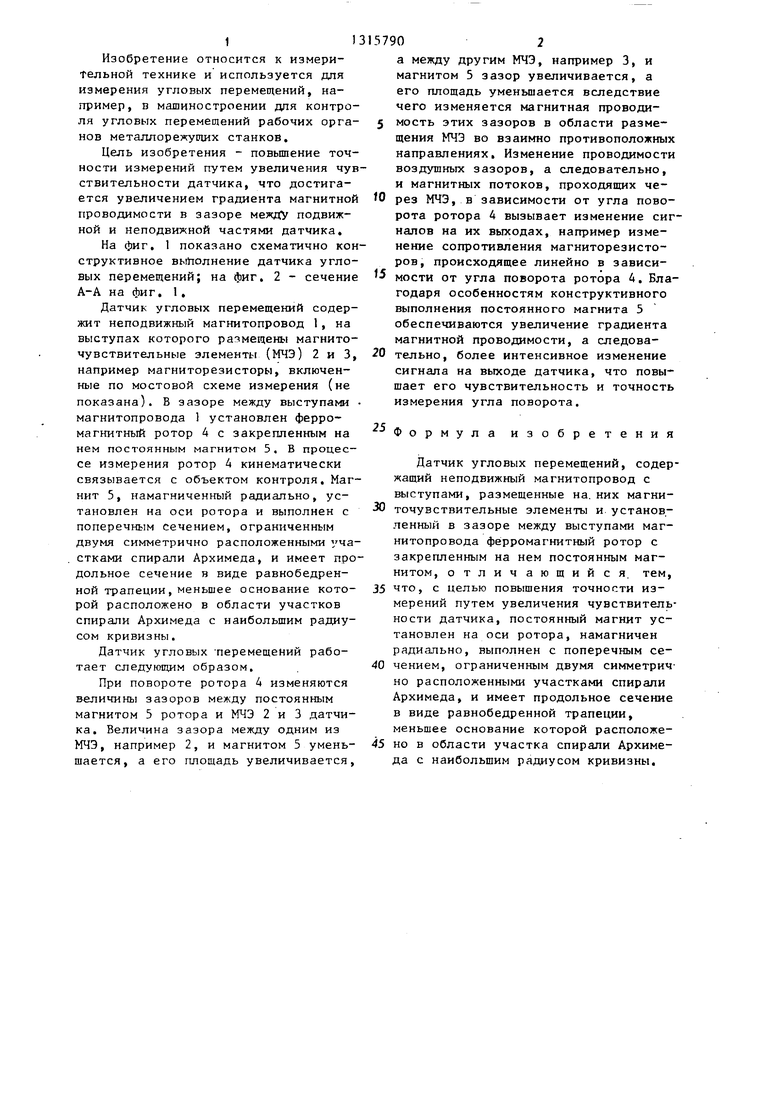
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| Датчик угловых перемещений | 1989 |
|
SU1620815A1 |
| Механизм преобразования вращательного движения в сложное | 1989 |
|
SU1657804A1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ | 1997 |
|
RU2121146C1 |
| Датчик угловых перемещений | 1989 |
|
SU1634992A1 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1997 |
|
RU2127866C1 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
Изобретение относится к измерительной технике и имеет целью повышение точности измерений путем увеличения чувствительности датчика угловых перемещений. Датчик содержит неподвижный магнитопровод 1, на выступах которого размещены магниточув- ствительные элементы ({ЧЭ) 2 и 3, включенные, например, по мостовой схеме измерения. В зазоре между выступами магнитопровода 1 установлен ферромагнитный ротор А, на оси которого закреплен постоянный магнит 5. Магнит 5 выполнен с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда, и имеет продольное сечение в виде равнобедренной трапеции, мень- гаее основание которой расположено в области участков спирали Архимеда с наибольшим радиусом кривизны. Магнит 5 намагничен радиально. При повороте ротора 4 дифференциально изменяются величины и площади зазоров между постоянным магнитом 5 и МЧЭ 2 и 3, вследствие чего изменяется магнитная проводимость зазоров меткду подвижной и неподвижной частями датчика в противоположных направлениях. В результате сигналы на выходе обоих МЧЭ линейно изменяются в функции угла поворота ротора датчика, 2 ил. (С (Л ,Л.и, .и, 
| Датчик угла поворота вала | 1979 |
|
SU773426A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
