1
(21)4647341/28 (22)0602.89 (46)23.06.91 Бюл Nfe 23 (75) Е.П Абрамцев (53)621 833(0888)
(56)Авторское свидетельство СССР № 1174638,кл. F 16 Н 25/12, 1984
(54) МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ
(57)Изобретение относится к машиностроению и может быть использовано в устройсУ- вах, где необходимо преобразовывать вращательное движение в возвратно-поступательное с вращением Целью изобретения является повышение эффективности и удобства в эксплуатации за счет обеспече
ния возможности измерения величин линейного и углового перемещения выходного звена При вращении ведущего вала 2 вращается за счет шлицевой втулки 5 и ведомый вал 3 При этом торцовый кулачок 4 обкатывается по роликам 11 и 12 В результате ведомый вал совершает одновременно и возвратно-поступательные движения в осевом направлении Амплитуда осевых перемещений регулируется при помощи привода 19 установкой роликов 11 и 12 на том или другом расстоянии от оси валов 2 и 3 Механизм снабжен устройством для измерения углового и линейного перемещения ведомого вала 3 включающим ферромагнитный ротор 21 обмотку 22 воз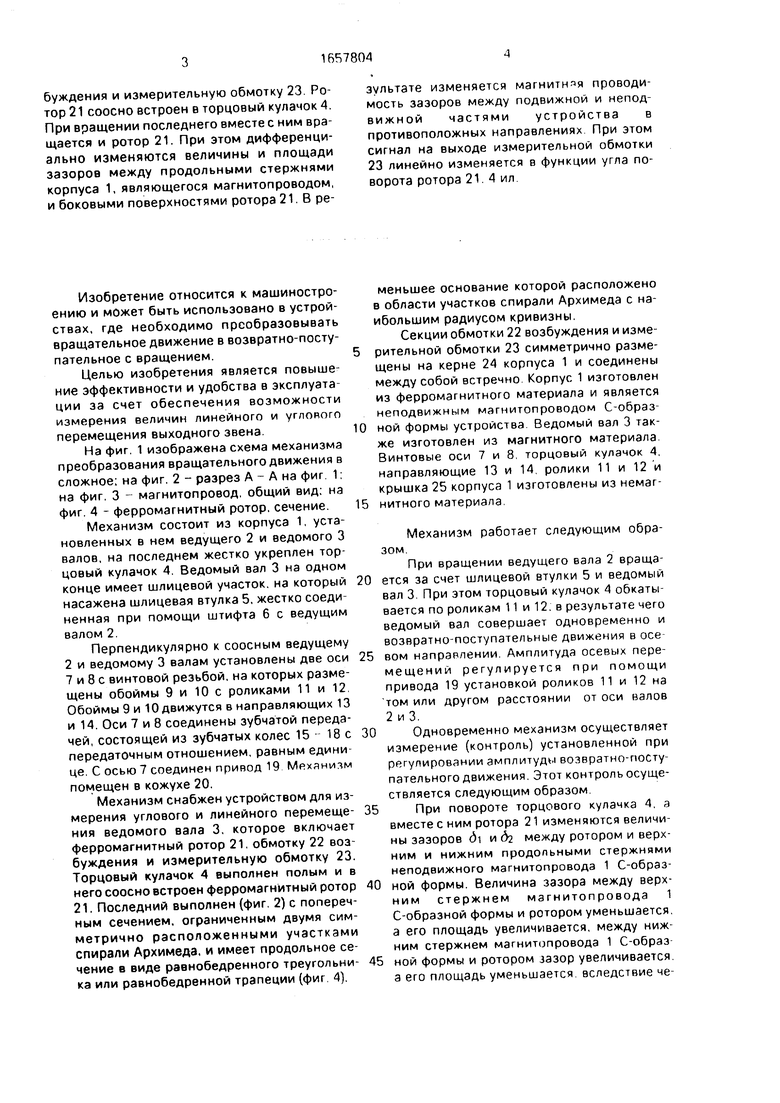
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1982 |
|
SU1102914A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МОЩНОСТИ | 1997 |
|
RU2145702C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Автомат для многодиапазонной размерной сортировки деталей, привод этого автомата и его измерительная станция | 1990 |
|
SU1816519A1 |
| Электрический двигатель | 1981 |
|
SU983928A1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ВАЛА | 1997 |
|
RU2145053C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2020 |
|
RU2740513C1 |
| Механизм преобразования вращательного движения в возвратно-поступательное - кулачковый механизм Ващука | 1983 |
|
SU1110971A1 |
| САМОТОРМОЗЯЩИЙСЯ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ СО СДВОЕННЫМ МАССИВНЫМ РОТОРОМ | 2014 |
|
RU2551893C1 |
| САМОТОРМОЗЯЩИЙСЯ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ СО СДВОЕННЫМ КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2015 |
|
RU2602242C1 |
Ц
L
И
О
ел VI
00
о
W
№
19
буждения и измерительную обмотку 23. Ротор 21 соосно встроен в торцовый кулачок 4. При вращении последнего вместе с ним вращается и ротор 21. При этом дифференциально изменяются величины и площади зазоров между продольными стержнями корпуса 1, являющегося магнитопроводом, и боковыми поверхностями ротора 21. В реИзобретение относится к машиностроению и может быть использовано в устройствах, где необходимо преобразовывать вращательное движение в возвратно-поступательное с вращением.
Целью изобретения является повышение эффективности и удобства в эксплуатации за счет обеспечения возможности измерения величин линейного и углового перемещения выходного звена.
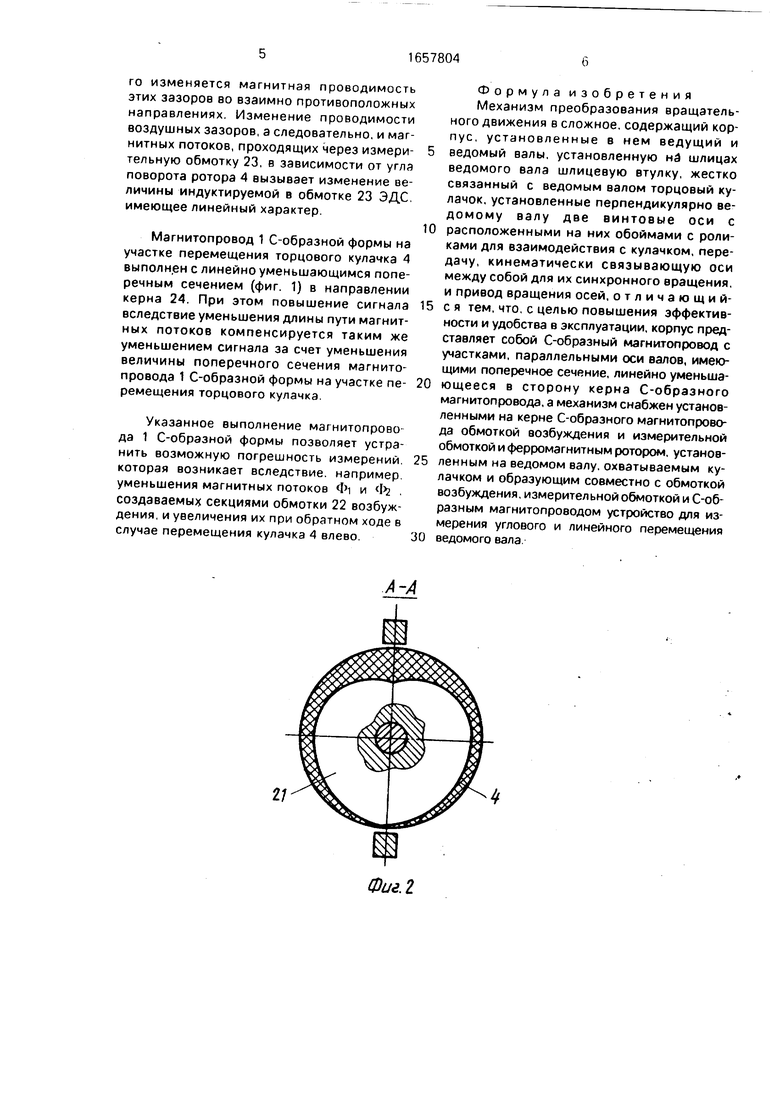
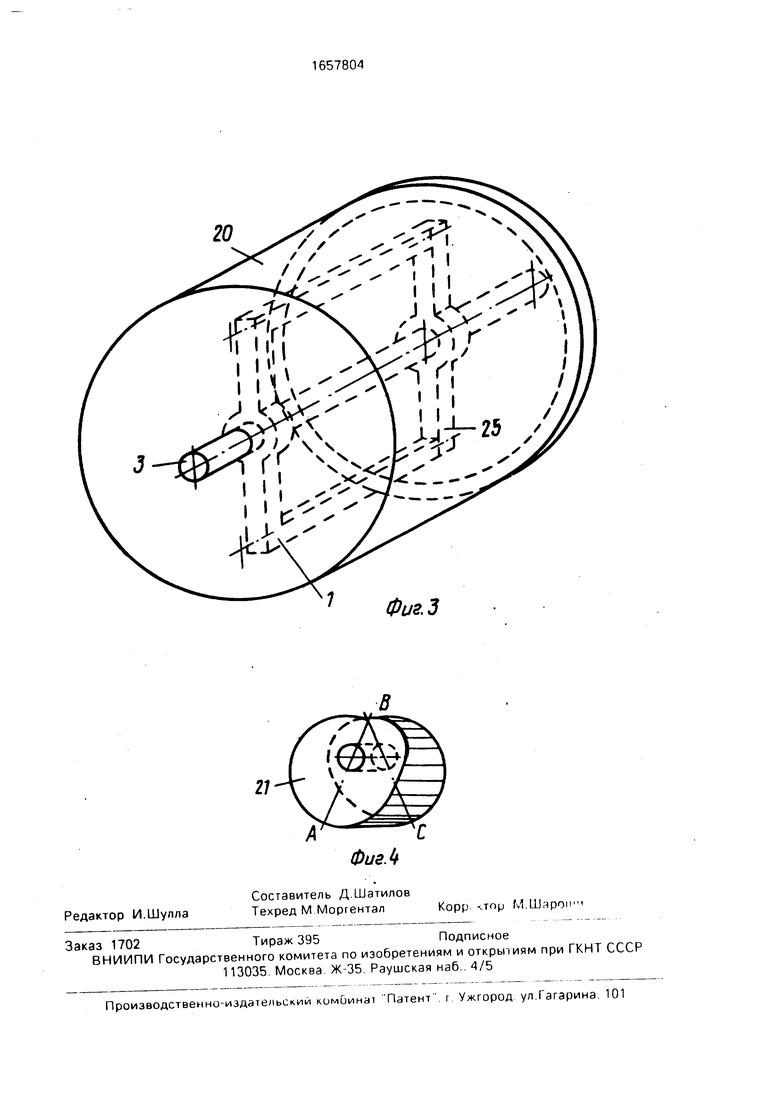
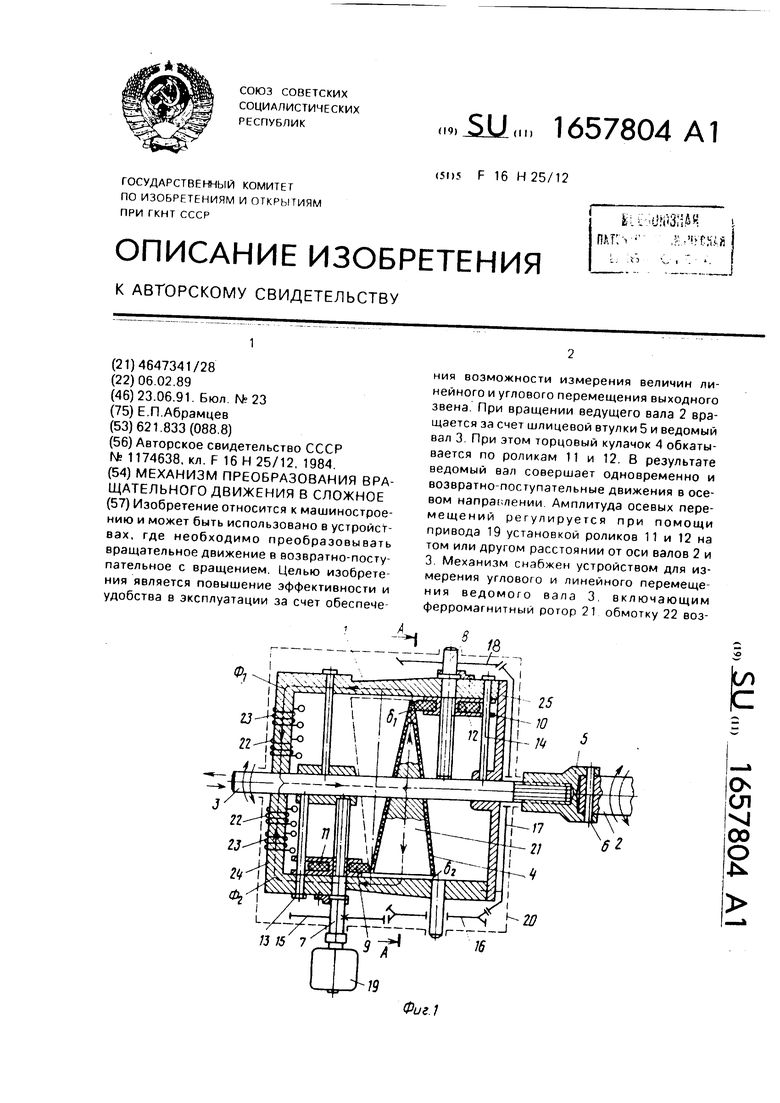
На фиг. 1 изображена схема механизма преобразования вращательного движения в сложное; на фиг. 2 - разрез А - А на фиг. 1: на фиг. 3 - магнитопровод, общий вид; на фиг. 4 - ферромагнитный ротор, сечение.
Механизм состоит из корпуса 1, установленных в нем ведущего 2 и ведомого 3 валов, на последнем жестко укреплен торцовый кулачок 4. Ведомый вал 3 на одном конце имеет шлицевой участок, на который насажена шлицевая втулка 5, жестко соединенная при помощи штифта 6 с ведущим валом 2.
Перпендикулярно к соосным ведущему 2 и ведомому 3 валам установлены две оси 7 и 8 с винтовой резьбой, на которых размещены обоймы 9 и 10 с роликами 11 и 12, Обоймы 9 и 10 движутся в направляющих 13 и 14. Оси 7 и 8 соединены зубчатой передачей, состоящей из зубчатых колес 15 18с передаточным отношением, равным единице. С осью 7 соединен привод 19 Механизм помещен в кожухе 20.
Механизм снабжен устройством для измерения углового и линейного перемещения ведомого вала 3, которое включает ферромагнитный ротор 21, обмотку 22 возбуждения и измерительную обмотку 23. Торцовый кулачок 4 выполнен полым и в него соосно встроен ферромагнитный ротор 21. Последний выполнен (фиг, 2) с поперечным сечением, ограниченным двумя симметрично расположенными участками спирали Архимеда, и имеет продольное сечение в виде равнобедренного треугольника или равнобедренной трапеции (фиг 4).
зультате изменяется магнитная проводимость зазоров между подвижной и неподвижной частями устройства в противоположных направлениях При этом сигнал на выходе измерительной обмотки 23 линейно изменяется в функции угла поворота ротора 21. 4 ил
меньшее основание которой расположено в области участков спирали Архимеда с наибольшим радиусом кривизны.
Секции обмотки 22 возбуждения и измерительной обмотки 23 симметрично размещены на керне 24 корпуса 1 и соединены между собой встречно Корпус 1 изготовлен из ферромагнитного материала и является неподвижным магнитопроводом С-образной формы устройства Ведомый вал 3 также изготовлен из магнитного материала. Винтовые оси 7 и 8, торцовый кулачок 4, направляющие 13 и 14. ролики 11 и 12 и крышка 25 корпуса 1 изготовлены из немагнитного материала.
Механизм работает следующим образом.
При вращении ведущего вала 2 вращается за счет шлицевой втулки 5 и ведомый вал 3. При этом торцовый кулачок 4 обкатывается по роликам 11 и 12. в результате чего ведомый вал совершает одновременно и возвратно-поступательные движения в осевом направлении. Амплитуда осевых перемещений регулируется при помощи привода 19 установкой роликов 11 и 12 на том или другом расстоянии от оси валов 2 иЗ.
Одновременно механизм осуществляет
измерение (контроль) установленной при регулировании амплитуды возвратно-поступательного движения. Этот контроль осуществляется следующим образом.
При повороте торцового кулачка 4, а
вместе с ним ротора 21 изменяются величины зазоров д и 62 между ротором и верхним и нижним продольными стержнями неподвижного магнитопровода 1 С-образ0 ной формы. Величина зазора между верхним стержнем магнитопровода 1 С-образной формы и ротором уменьшается, а его площадь увеличивается, между нижним стержнем магнитопровода 1 С-образ5 ной формы и ротором зазор увеличивается. а его площадь уменьшается вследствие чего изменяется магнитная проводимость этих зазоров во взаимно противоположных направлениях. Изменение проводимости воздушных зазоров, а следовательно, и магнитных потоков, проходящих через измерительную обмотку 23, в зависимости от угла поворота ротора 4 вызывает изменение величины индуктируемой в обмотке 23 ЭДС. имеющее линейный характер.
Магнитопровод 1 С-образной формы на участке перемещения торцового кулачка 4 выполнен с линейно уменьшающимся поперечным сечением (фиг. 1) в направлении керна 24. При этом повышение сигнала вследствие уменьшения длины пути магнитных потоков компенсируется таким же уменьшением сигнала за счет уменьшения величины поперечного сечения магнито- провода 1 С-образной формы на участке перемещения торцового кулачка.
Указанное выполнение магнитопрово- да 1 С-образной формы позволяет устранить возможную погрешность измерений. которая возникает вследствие, например, уменьшения магнитных потоков и , создаваемых секциями обмотки 22 возбуждения, и увеличения их при обратном ходе в случае перемещения кулачка 4 влево.
Формула изобретения Механизм преобразования вращательного движения в сложное, содержащий корпус, установленные в нем ведущий и 5 ведомый валы, установленную нд шлицах ведомого вала шлицевую втулку, жестко связанный с ведомым валом торцовый кулачок, установленные перпендикулярно ведомому валу две винтовые оси с
0 расположенными на них обоймами с роликами для взаимодействия с кулачком, передачу, кинематически связывающую оси между собой для их синхронного вращения, и привод вращения осей, отличающий5 с я тем, что. с целью повышения эффективности и удобства в эксплуатации, корпус представляет собой С-образный магнитопровод с участками, параллельными оси валов, имеющими поперечное сечение, линейно уменьша0 ющееся в сторону керна С-образного магнитопровода, а механизм снабжен установленными на керне С-образного магнитопровода обмоткой возбуждения и измерительной обмоткой и ферромагнитным ротором, установ5 ленным на ведомом валу, охватываемым кулачком и образующим совместно с обмоткой возбуждения, измерительной обмоткой и С-об- разным магнитопроводом устройство для измерения углового и линейного перемещения
0 ведомого вала.
Фиг. 2
20
Фиг.З
