Изобретение относится к устройствам управления копанием экскаватора и предназначено для автоматического контроля за приближением ковша к массивным металлическим изделиям, в частности к поверхности трубопровода. Устройство может найти применение при проведении землеройных (вскрышных) работ с помощью ковшового экскаватора, например, в нефтяной и газовой промышленности.
Известные устройства для измерения глубины копания экскаватора не позволяют контролировать расстояние между ковшом экскаватора и стенкой трубопровода, что может привести к повреждению изоляции и стенки трубопровода.
Задача изобретения - предотвращение повреждения изоляции и стенки трубопровода при землеройных работах за счет автоматического контроля безопасности расстояния между ковшом экскаватора и поверхностью трубопровода.
Предлагаемое устройство контроля расстояния между ковшом экскаватора и поверхностью трубопровода характеризуется тем, что оно содержит закрепленную на стреле экскаватора и охватывающую ее передающую катушку индуктивности, соединенную с передатчиком электромагнитных колебаний, и охватывающую платформу экскаватора приемную катушку индуктивности, которая связана по магнитной цепи, образованной стрелой экскаватора, ковшом, зазором между ковшом и трубопроводом и пространством между трубопроводом и шасси экскаватора, с передающей катушкой и соединена с приемником-преобразователем, соединенным с узлом блокировки и сигнализации, воздействующим на исполнительный механизм экскаватора.
При приближении ковша экскаватора к трубопроводу магнитное сопротивление цепи, образуемой ковшом экскаватора, трубопроводом и шасси экскаватора, значительно уменьшается. Так как площадь шасси экскаватора намного больше эффективной площади ковша экскаватора, то в этой части магнитное сопротивление меняется незначительно. Таким образом, магнитное сопротивление цепи будет определяться величиной расстояния между ковшом экскаватора и трубопроводом. При уменьшении магнитного сопротивления цепи ниже критического срабатывает узел блокировки и сигнализации, который сначала выдает звуковой и световой сигналы, а при дальнейшем уменьшении расстояния - воздействует на исполнительный механизм экскаватора.
На чертеже представлена принципиальная схема предлагаемого устройства.
Устройство содержит передатчик электромагнитных колебаний 1, передающую катушку индуктивности 2, приемную катушку индуктивности 3, приемник-преобразователь 4, узел блокировки и сигнализации 5.
Стрела 6, ковш 7 экскаватора, зазор 8 между ковшом 7 экскаватора и трубопроводом 9, трубопровод 9, пространство 10 между трубопроводом 9 и шасси 11 экскаватора образуют магнитную цепь.
Передающая катушка индуктивности 2, закрепленная на стреле экскаватора и охватывающая ее и соединенная с передатчиком электромагнитных колебаний 1, связана по указанной выше магнитной цепи с приемной катушкой индуктивности 3, охватывающей шасси экскаватора у основания, которая соединена с системой управления, состоящей из приемника-преобразователя 4. Последний соединен с узлом блокировки и сигнализации 5, воздействующим на исполнительный механизм экскаватора.
Устройство работает следующим образом.
При приближении ковша 7 экскаватора к трубопроводу 9 магнитное сопротивление цепи здесь значительно уменьшается. Так как площадь шасси 11 экскаватора намного больше эффективной площади ковша 7 экскаватора, то в этой части магнитное сопротивление меняется незначительно. Таким образом, магнитное сопротивление цепи будет определяться величиной расстояния между ковшом 7 экскаватора и трубопроводом 9. При уменьшении магнитного сопротивления цепи ниже критического срабатывает узел блокировки и сигнализации 5, который сначала выдает звуковой и световой сигналы, а при дальнейшем уменьшении расстояния - воздействует на исполнительный механизм 12 экскаватора.
Электромагнитные колебания передатчика электромагнитных колебаний излучаются через передающую катушку индуктивности 2 и через ковш 7 экскаватора, зазор 8 между ковшом 7 экскаватора и трубопроводом 9, пространство 10 между трубопроводом 9 и шасси 11 экскаватора и принимаются приемной катушкой индуктивности 3. Приемник-преобразователь 4 усиливает эти электромагнитные колебания, сравнивает с первым опорным сигналом, соответствующим установленному пороговому (первому) значению расстояния между ковшом экскаватора и телом трубы. При значении принимаемого сигнала выше первого опорного узел блокировки и сигнализации 5 выдает оператору световой и звуковой сигналы. При значении принимаемого сигнала выше второго опорного сигнала, т.е. при дальнейшем приближений ковша к телу трубы, узел блокировки и сигнализации 5 выдает сигнал на исполнительный механизм 12 экскаватора для остановки дальнейшего движения ковша.
Алгоритмом работы приемника-преобразователя 4 предусмотрен анализ амплитуды сигнала с приемной катушки индуктивности 3, резкое увеличение которого будет соответствовать приближению ковша к шасси экскаватора. При этом будет исключено ложное срабатывание устройства.
Использование изобретения позволит осуществлять автоматический контроль безопасного расстояния между ковшом экскаватора и поверхностью трубопровода и тем самым предотвратить повреждение наружного изоляционного покрытия и стенки трубопровода при ремонтных работах, а также повысить производительность труда оператора экскаватора.
Изобретение относится к устройствам управления копанием экскаватора и предназначено для автоматического контроля приближения ковша к массивным металлическим изделиям, в частности к поверхности трубопровода. Устройство может найти применение при проведении землеройных (вскрышных) работ с помощью одноковшового экскаватора, например, в нефтяной и газовой промышленности. Задачей изобретения является обеспечение автоматического контроля безопасного расстояния между ковшом экскаватора и поверхностью трубопровода. Для этого устройство содержит закрепленную на стреле экскаватора и охватывающую ее передающую катушку индуктивности, соединенную с передатчиком электромагнитных колебаний. Приемная катушка индуктивности охватывает платформу экскаватора и соединена с приемником-преобразователем, который связан с узлом блокировки и сигнализации, воздействующим на исполнительный механизм экскаватора. 1 ил.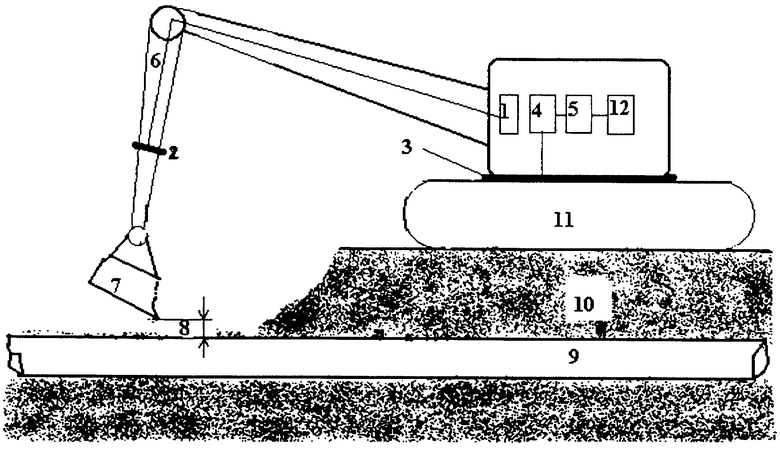
Устройство контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, характеризующееся тем, что оно содержит закрепленную на стреле экскаватора и охватывающую ее передающую катушку индуктивности, соединенную с передатчиков электромагнитных колебаний, и охватывающую платформу экскаватора приемную катушку индуктивности, которая связана по магнитной цепи, образованной стрелой экскаватора, ковшом, зазором между ковшом и трубопроводом и пространством между трубопроводом и шасси экскаватора, с передающей катушкой и соединена с приемником-преобразователем, соединенным с узлом блокировки и сигнализации, воздействующим на исполнительный механизм экскаватора.
| Кабелеукладчик | 1980 |
|
SU861501A1 |
| 1972 |
|
SU412359A1 | |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ГЛУБИНЫ КОПАЧЙ51- | 0 |
|
SU327305A1 |
| SU 1146383 A, 23.03.85 | |||
| 0 |
|
SU384997A1 | |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| Устройство управления кабелеизвлекающей машиной | 1988 |
|
SU1594251A1 |
| Кабелеукладчик | 1976 |
|
SU703631A1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 1990 |
|
RU2029828C1 |

