Изобретение относится к устройствам управления копанием экскаватора и предназначено для определения расстояния от ковша до тела трубы продуктопровода в процессе его вскрытия. Область техники, к которой относится изобретение
Основной проблемой при проведении ремонтных работ, связанных со вскрытием трубопровода, является недопущение повреждения его ковшом экскаватора.
Известна экскаваторная система для предотвращения повреждения подземных кабелей и труб (https://dianetcom.ru/info/catalog/test_pribor/poisk_pribor/Ezidig). Система включает сенсорный модуль, который монтируется на стреле экскаватора, непосредственно перед ковшом, модуль управления, генератор и барабан с сигнальным кабелем. Модуль управления устанавливается в кабине оператора. Индикатор модуля управления снабжен системой управления, что позволяет быстро и точно настроить прибор под ту или иную задачу. Для локализации труб к коммуникации необходимо подключить генератор, который подает в нее сигнал на частоте 32,758 к ГЦ. Предварительную локализацию коммуникаций и разметку направлений подземных трасс выполняют при помощи трассоискателя или георадара. Сигнал от генератора, подключенного к кабельному барабану, поступает в кабель, который в свою очередь погружается в землю на участке работы. Через кабель в земле распространяется сигнал генератора, на который реагируют трассоискатели и система.
Недостатком известного технического решения является то, что показывается только относительное расстояние до объекта, без уточнения его в метрах.
Известно устройство контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, который является ближайшим аналогом (патент RU 2140493 опубл. 27.10.1999), в котором на стреле экскаватора закреплена передающая катушка индуктивности, соединенная с передатчиком электромагнитных колебаний. Приемная катушка индуктивности охватывает платформу экскаватора, которая связана по магнитной цепи, образованной стрелой экскаватора, ковшом, зазором между ковшом и трубопроводом и пространством между трубопроводом и шасси экскаватора, с передающей катушкой и соединена с приемником-преобразователем, соединенным с узлом блокировки и сигнализации, воздействующим на исполнительный механизм экскаватора.
Недостатками технического решения являются: сложность монтажа приемной катушки на шасси экскаватора и низкая точность определения расстояния.
Задача направлена на создание системы и способа контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, обеспечивающего безопасное вскрытие трубопровода.
Технический результат заключается в повышении точности определения критического расстояния между ковшом экскаватора и поверхностью стенки трубопровода.
Для решения указанной задачи и достижения отмеченного технического результата в первом объекте настоящего изобретения предложена система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, которая содержит приемную часть, взаимодействующую с передающей частью, согласно предложенному решению, приемная часть выполнена в виде устройства приема, регистрации и обработки сигнала и включает последовательно соединенные блок приемных антенн, усилитель, решающее устройство, второй вход которого соединен с датчиком угла наклона, а выход - с первым входом блока управления, второй вход которого соединен с датчиком угла наклона, а выход блока управления подключен к интерфейсу панели индикации, при этом блок приемных антенн включает два антенных блока, расположенные относительно друг друга на расстоянии 400-600 мм, причем каждый антенный блок содержит три ортогонально расположенные катушки индуктивности, передающая часть включает два электрода, установленные на теле трубы на расстоянии 30-300 м, первый электрод подключен к опорному генератору низкочастотного поля, а второй электрод и генератор заземлены шиной на расстоянии не менее 7,0 м от оси тела трубы.
Для решения той же задачи и достижения того же технического результата во втором объекте настоящего изобретения предложен способ контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, заключающийся в создании электромагнитного поля, в котором в изоляции, нанесенной на тело трубы, выполняют проколы двумя электродами, разнесенными на расстояние 30-300 м друг от друга, обеспечивая электрический контакт между телом трубы и электродами, один электрод подключают к опорному генератору низкочастотного поля и подают переменное напряжение низкой частоты на тело трубы, блок приемных антенн принимает излучение, сигнал передают на усилитель и затем на решающее устройство и определяют расстояние до центра тела трубы по формуле:
где:
d - расстояние от центра тела трубы до нижнего приемного блока;
S - базовое расстояние между приемными блоками;
EB - амплитуда сигнала на верхнем приемном блоке;
EH - амплитуда сигнала на нижнем приемном блоке,
одновременно с помощью датчика угла наклона измеряют угол между осевой рукояти ковша и горизонталью, полученные данные передают на решающее устройство, при достижении критического значения d сигнал поступает на блок управления для включения световой и звуковой индикации.
Изобретение поясняется чертежами.
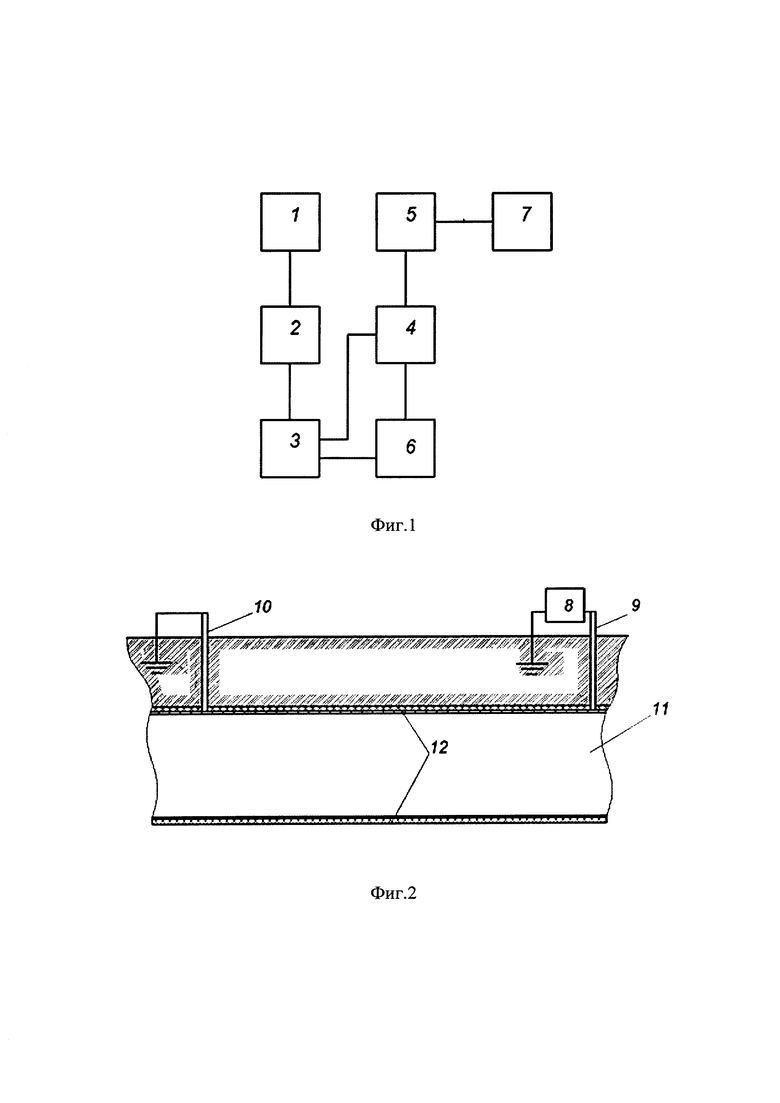
На фиг. 1 и фиг. 2 представлены функциональная схема приемной части системы и функциональная схема передающей части.
1 - блок приемных антенн;
2 - усилитель мощности;
3 - решающее устройство;
4 - блок управления;
5 - интерфейс панели индикации;
6 - датчик угла наклона;
7 - панель индикации;
8 - опорный генератор низкочастотного поля;
9 - первый электрод;
10 - второй электрод;
11 - тело трубы;
12 - изоляция трубы.
Осуществление изобретения
Система определения критического расстояния между приближающимся ковшом экскаватора и телом трубы содержит приемную часть, передающую часть и блок индикации.
Приемная часть выполнена в виде устройства для приема, обработки и регистрации сигнала (УПРО). УПРО включает последовательно соединенные блок приемных антенн 1, усилитель 2, решающее устройство 3, второй вход которого соединен с датчиком угла наклона 6, выход решающего устройство 3 соединен с первым входом блока управления 4, второй вход которого соединен с датчиком угла наклона 6, а выход блока управления 4 соединен с интерфейсом 5 панели индикации 7. УПРО монтируются непосредственно на рукояти экскаватора. Блок приемных антенн 1 расположен на теле рукояти и включает два антенных блока, расположенных таким образом, что их оси чувствительности направлены соосно по оси диаграммы направленности антенн. При направлении рукояти в сторону тела трубы, первый антенный блок будет располагаться к трубопроводу ближе второго на 400 мм - 600 мм.
Передающая часть включает опорный генератор 8 и первый и второй стальные электроды 9 и 10, которые устанавливаются на обваловке тела трубы 11 и обеспечивают подачу низкочастотного напряжения на тело трубы 11.
Панель индикации 7 устанавливается в кабине оператора и служит для отображения текущей информации, а также для выдачи световых и звуковых сигналов при достижении механизмом критического расстояния.
Способ контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода осуществляется следующим образом.
В зоне проведения вскрышных работ на тело трубы 11 подается переменное напряжение низкой частоты опорного генератора 8, которое фиксируется приемной частью системы. Тело трубы 11 используется как передающая антенна, излучение которой принимается всенаправленными антеннами.
Для подачи на тело трубы 11 переменного напряжения низкой частоты генератора 8 в зоне проведения вскрышных работ на осевой линии трассы первым электродом 9 делается прокол изоляции 12 до тела трубы 11 для обеспечения электрического контакта между телом трубы 11 и первым электродом 9. Через 30-300 метров от места установки первого электрода 9 в направлении вскрышных работ на осевой линии трассы вторым электродом 10 делается прокол изоляции до тела трубы 11.
Первый электрод 9 подключается к опорному генератору 8. Клемма «Земля» генератора 8 и второй электрод 10 заземляются на расстоянии не менее 7 метров от места проведения работ. Заземление обеспечивает равномерное формирование электромагнитного поля вокруг участка тела трубы 11. После этого подается переменное напряжение низкой частоты опорного генератора 8 на тело трубы 11. При включении генератора низкочастотного поля 8, подключенного к телу трубопровода 11, вокруг него формируется магнитное поле. Так как блоки приемных антенн расположены на расстоянии 400-600 мм друг от друга, то уровень принимаемых электромагнитных сигналов в первом и втором приемных блоках различаются. Блоки приемных антенн содержат по три ортогонально расположенные катушки индуктивности. Такое расположение катушек обеспечивает почти неизменное результирующее значение амплитуды в каждом блоке при поворотах УПРО. Излучение от тела трубы 11 попадает на блок приемных антенн 1 и после усилителя 2 - на решающее устройство 3. Решающее устройство 3 вычисляет расстояние до центра тела трубы по формуле:  и полученная информация передается через блок управления 4 и интерфейс 5 на панель индикации 7. Датчик угла наклона 6 измеряет угол между осевой рукояти и горизонталью и передает информацию в решающее устройство 3 и в блок управления 4. При достижении ковшом критического значения расстояния d, решающее устройство 3 выдает сигнал на блок управления 4, который через интерфейс 5 включает световую и звуковую индикацию на панели индикации 7 в кабине экскаватора.
и полученная информация передается через блок управления 4 и интерфейс 5 на панель индикации 7. Датчик угла наклона 6 измеряет угол между осевой рукояти и горизонталью и передает информацию в решающее устройство 3 и в блок управления 4. При достижении ковшом критического значения расстояния d, решающее устройство 3 выдает сигнал на блок управления 4, который через интерфейс 5 включает световую и звуковую индикацию на панели индикации 7 в кабине экскаватора.
Предложенное решение можно использовать при выполнении работ на любых грунтах, кроме скальных, а также в условиях заболоченности и при сложных метеоусловиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода | 2019 |
|
RU2743981C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ КАБЕЛЬНЫХ ЛИНИЙ | 2022 |
|
RU2806079C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ КОВШОМ ЭКСКАВАТОРА И ПОВЕРХНОСТЬЮ СТЕНКИ ТРУБОПРОВОДА | 1997 |
|
RU2140493C1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ ОБЪЕКТОМ | 2013 |
|
RU2528790C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КОПАЮЩЕГО ПРИСПОСОБЛЕНИЯ (ВАРИАНТЫ) И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОЧЕЙ МАШИНЫ НА РАБОЧЕЙ ПЛОЩАДКЕ (ВАРИАНТЫ) | 1995 |
|
RU2134329C1 |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1988 |
|
SU1587149A1 |
| Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами | 2017 |
|
RU2683451C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СОСТОЯНИЯ ВНУТРИТРУБНЫХ ОБЪЕКТОВ | 2002 |
|
RU2204760C1 |
Изобретение относится к устройству и способу определения расстояния от ковша до тела трубы продуктопровода в процессе его вскрытия. Техническим результатом является повышение точности определения критического расстояния между ковшом экскаватора и поверхностью стенки трубопровода. Система включает приемную часть, выполненную в виде устройства приема, регистрации и обработки сигнала, и включает последовательно соединенные блок приемных антенн, усилитель, решающее устройство, второй вход которого соединен с датчиком угла наклона, а выход - с первым входом блока управления, второй вход которого соединен с датчиком угла наклона, а выход блока управления подключен к интерфейсу панели индикации, при этом блок приемных антенн включает два антенных блока, расположенные относительно друг друга на расстоянии 400-600 мм, причем каждый антенный блок содержит три ортогонально расположенные катушки индуктивности, взаимодействующую с передающей частью, включающей два электрода, первый электрод подключен к опорному генератору низкочастотного поля, второй электрод и генератор заземлены шиной. В изоляции, нанесенной на тело трубы, выполняют проколы двумя электродами, один электрод подключают к опорному генератору низкочастотного поля и подают переменное напряжение низкой частоты на тело трубы, блок приемных антенн принимает излучение, сигнал передают на усилитель и затем на решающее устройство и определяют расстояние до центра тела трубы по формуле:
где:
d - расстояние от центра тела трубы до нижнего приемного блока;
S - базовое расстояние между приемными блоками;
EB - амплитуда сигнала на верхнем приемном блоке;
EH - амплитуда сигнала на нижнем приемном блоке,
одновременно с помощью датчика угла наклона измеряют угол между осевой рукояти ковша и горизонталью, данные передают на решающее устройство, при достижении значения критического значения d сигнал поступает на блок управления для включения световой и звуковой индикации. 2 н.п. ф-лы, 2 ил.
1. Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, включающая приемную часть, взаимодействующую с передающей частью, отличающаяся тем, что приемная часть выполнена в виде устройства приема, регистрации и обработки сигнала и включает последовательно соединенные блок приемных антенн, усилитель, решающее устройство, второй вход которого соединен с датчиком угла наклона, а выход - с первым входом блока управления, второй вход которого соединен с датчиком угла наклона, а выход блока управления подключен к интерфейсу панели индикации, при этом блок приемных антенн включает два антенных блока, расположенных относительно друг друга на расстоянии 400-600 мм, причем каждый антенный блок содержит три ортогонально расположенные катушки индуктивности, передающая часть включает два электрода, установленных на теле трубы на расстоянии 30-300 м, первый электрод подключен к опорному генератору низкочастотного поля, а второй электрод и генератор заземлены шиной на расстоянии не менее 7,0 м от оси тела трубы.
2. Способ контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода, заключающийся в создании электромагнитного поля, отличающийся тем, что в изоляции, нанесенной на тело трубы, выполняют проколы двумя электродами, разнесенными на расстояние 30-300 м друг от друга, обеспечивая электрический контакт между телом трубы и электродами, один электрод подключают к опорному генератору низкочастотного поля и подают переменное напряжение низкой частоты на тело трубы, блок приемных антенн принимает излучение, сигнал передают на усилитель и затем на решающее устройство и определяют расстояние до центра тела трубы по формуле:
где:
d - расстояние от центра тела трубы до нижнего приемного блока;
S - базовое расстояние между приемными блоками;
EB - амплитуда сигнала на верхнем приемном блоке;
EH - амплитуда сигнала на нижнем приемном блоке,
одновременно с помощью датчика угла наклона измеряют угол между осевой рукояти ковша и горизонталью, данные передают на решающее устройство, при достижении значения критического значения d сигнал поступает на блок управления для включения световой и звуковой индикации.
| УСТРОЙСТВО КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ КОВШОМ ЭКСКАВАТОРА И ПОВЕРХНОСТЬЮ СТЕНКИ ТРУБОПРОВОДА | 1997 |
|
RU2140493C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАССЫ ПОДЗЕМНОЙ МЕТАЛЛИЧЕСКОЙ ЛИНИИ | 2005 |
|
RU2302649C2 |
| Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами | 2017 |
|
RU2683451C2 |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| УСТРОЙСТВО СВЯЗИ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ПО ТРУБОПРОВОДНОМУ КАНАЛУ | 1997 |
|
RU2170952C2 |
| US 3452207 A1, 24.06.1969 | |||
| JPH 1018353 A, 20.01.1998. | |||

