Изобретение относится к авиастроению, в частности к комплексам бортового оборудования вертолетов, обеспечивающих боевое применение на основе целераспределения и целеуказания между взаимодействующими в группе ударными и разведывательными вертолетами при выполнении координированных фронтовых операций.
Из известных комплексов в качестве прототипа выбирается комплекс, структурная схема которого приведена в книге [1] Гришутина В.Г. "Лекции по авиационным системам стрельбы", Киев, КВВИУ, 1980 г., стр. 356, содержащий на борту каждого взаимодействующего вертолета взаимосвязанные прицельно-навигационную систему (ПНС), индикационно-отрабатывающую систему (ИОС), систему связи (СС) каждого взаимодействующего вертолета с каждым.
Целераспределение осуществляется через СС передачей координат обнаруженных целей, а целеуказание и боевое применение осуществляется при непосредственном контакте (активная локация) с целями средствами ПНС каждого объекта, что приводит к возможности обнаружения вертолетов средствами противодействия лоцируемых наземных и воздушных целей.
Техническим результатом, обеспечиваемым при использовании предлагаемого технического решения, является расширение функциональных возможностей комплекса.
Достигается технический результат тем, что в комплекс группового боевого взаимодействия вертолетов, содержащий взаимосвязанные по каналу информационного обмена прицельно-навигационную систему, индикационно-отрабатывающую систему и систему связи, дополнительно введены устройство формирования координат мерцающих, невидимых и пассивно-лоцируемых целей, устройство формирования и коррекции курса и координат взаимодействующих вертолетов, устройство формирования траектории движения подвижных наземных и воздушных целей, взаимосвязанные между собой и с прицельно-навигационной системой, индикационно-отрабатывающей системой и системой связи, обеспечивающие режимы скрытного группового применения по невидимым, мерцающим и пассивно-лоцируемым воздушным и наземным подвижным и неподвижным целям.
На фиг. 1 представлена блок-схема предлагаемого комплекса, содержащего:
1 - прицельно-навигационная система ПНС,
2 - индикационно-отрабатывающая система ИОС,
3 - система связи СС,
4 - устройство формирования и коррекции курса и координат взаимодействующих вертолетов УККК,
5 - устройство формирования координат мерцающих, невидимых и пассивно-лоцируемых целей УМНПЦ,
6 - устройство формирования траектории движения подвижных наземных и воздушных целей УПДЦ.
Двойной линией со стрелками обозначены бортовые информационные линии проводной связи, например, выполненные по мультиплексному каналу информационного обмена (интерфейс магистральный последовательный).
Зигзагообразной линией со стрелками обозначены входы-выходы СС3 по сигналам радиосвязи и каналы локации целей средствами ПНС1 по радиолокационным и оптиколокационным сигналам.
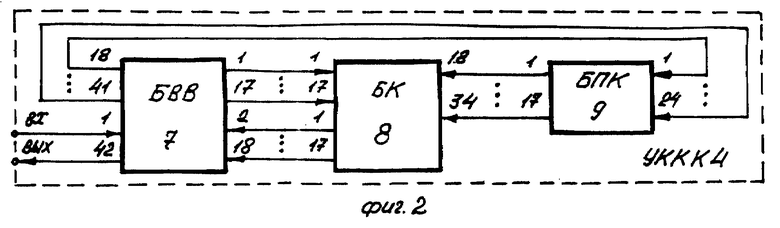
На фиг. 2 представлена блок-схема УККК4, содержащего:
7 - блок ввода-вывода БВВ,
8 - блок коррекции БК,
9 - блок преобразования координат БПК.
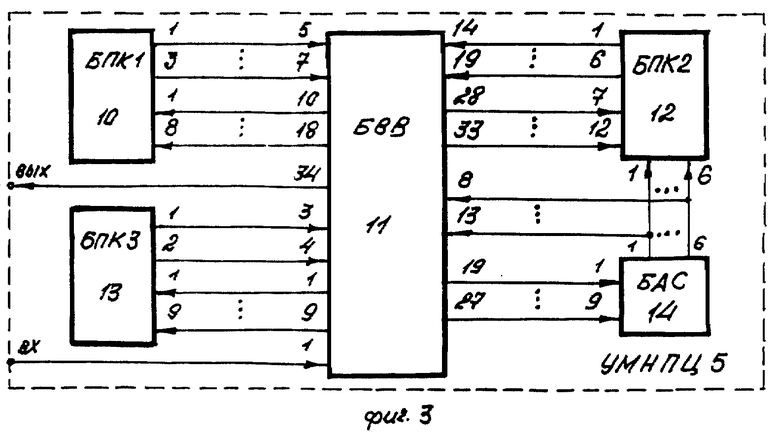
На фиг. 3 представлена блок-схема УМНПЦ5, содержащего:
10 - первый блок преобразования координат БПК1,
11 - блок ввода-вывода БВВ,
12 - второй блок преобразования координат БПК2,
13 - третий блок преобразования координат БПК3,
14 - блок алгебраического суммирования БАС.
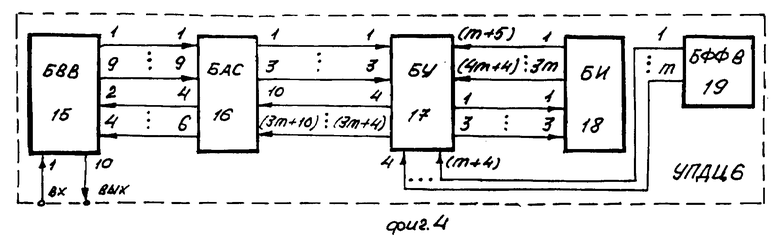
На фиг. 4 представлена блок-схема УПДЦ6 содержащего:
15 - блок ввода-вывода БВВ,
16 - блок алгебраического суммирования БАС,
17 - блок умножения БУ,
18 - блок интеграторов БИ,
19 - блок формирования функций времени БФФВ.
Примеры технического выполнения блоков приведены:
- БАС, БИ, БУ, БФФВ, БПК в книге [2] Тетельбаума И.М. "400 схем для АВМ", М.: Энергия, 1978 г., стр. 8, стр. 9, стр. 10, стр. 85, стр. 134;
- БВВ в книге [3] Преснухина Л.Н. "Цифровые вычислительные машины", М.: Высшая школа, 1981 г., стр. 394 - 406;
- БК в книге [4] Сейдж Э. "Теория оценивания и ее применение в связи и управлении", М.: Связь, 1976 г., стр. 288.
Комплекс работает следующим образом.
Локационными средствами ПНС1 обнаруживаются воздушные и наземные цели и ориентиры (i - количество лоцируемых объектов), их координаты относительно вертолета (в земной системе координат) - X1цi, Z1цi, H1цi - продольная, боковая и вертикальная координаты и в полярной системе координат D1цi, ϕ1цi, θ1цi - дальности и углы визирования целей фиксируются в ПНС-1, в которой также запрограммированы координаты известных целей (ориентиров) - Xцi, Zцi, Hцi в земной системе координат. В ПНС1 также формируются навигационные параметры движения вертолета - продольная - X1, боковая - Z1 и вертикальная координаты - H1 в земной системе координат и углы географического курса ψ1, крена γ1, тангажа ν1 и относительные координаты относительно любого взаимодействующего вертолета (индекс "2") - X12 = X2 - X1, Z12 = Z2 - Z1, H12 = H2 - H1, где координаты X2, Z2, H2 получены через канал информационного обмена с СС3, по каналу радиосвязи которого принимаются и выдаются в канал информационного обмена углы ψ2, γ2, ν2, координаты лоцируемых целей X2цi, Z2цi, H2цi, D2цi, ϕ2цi, θ2цi.
Канал информационного обмена через вход УККК4 (см. фиг. 2) подключен к первому входу БВВ7, осуществляющего выбор параметров для передачи в подключенные к нему блоки БК8 и БПК9.
При одновременной локации двух (i=1; 2) запрограммированных наземных неподвижных целей сигналы параметров X1, Z1, H1, X2, Z2, H2, ψ2, ψ1, X12, Z12, H12, Xц1, Zц1, Hц1, Xц2, Zц2, Hц2 с первого - семнадцатого выходов БВВ7 поступают на первый - семнадцатый вход БК8, а сигналы параметров D1ц1, D1ц2, ϕ1ц1, ψ1ц2, θ1ц1, θ1ц2, Xц1, Xц2, Zц1, Zц2, Hц1, Hц2, D2ц1, D2ц2 ϕ2ц1, ψ2ц2, θ2ц2, θ2ц1, с восемнадцатого - сорок первого выходов БВВ7 поступают на первый - двадцать четвертый входы БПК9, в котором в соответствии с поступившими параметрами по уравнениям пространственной локации множества целей (не менее двух) в едином времени на основе зависимостей локации одной цели (см. книгу [5] , Мубаракшина Р.В. "Комплексное наведение летательных аппаратов и отдельных средств", Москва, Машиностроение, 1990 г., стр. 85, формируются параметры  например, в горизонтальной плоскости при θ1ц1 = 0, θ1ц2/= 0
например, в горизонтальной плоскости при θ1ц1 = 0, θ1ц2/= 0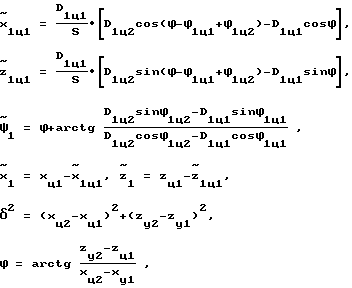
и аналогичные формулы для второго взаимодействующего вертолета с заменой первого индекса "1" на индекс "2". (Здесь с индексом "0" обозначены точные значения параметром,  флюктуационные центрированные погрешности), сигналы которых с первого - семнадцатого выходов БПК9 поступают на восемнадцатый - тридцать четвертый входы БК8, на первый - семнадцатый входы которого, как представлено выше, поступают сигналы координат запрограммированных целей Xц1, Zц1, Hц1, Xц2, Zц2, Hц2, координаты и углы курса первого и второго взаимодействующих вертолетов
флюктуационные центрированные погрешности), сигналы которых с первого - семнадцатого выходов БПК9 поступают на восемнадцатый - тридцать четвертый входы БК8, на первый - семнадцатый входы которого, как представлено выше, поступают сигналы координат запрограммированных целей Xц1, Zц1, Hц1, Xц2, Zц2, Hц2, координаты и углы курса первого и второго взаимодействующих вертолетов
относительные координаты взаимодействующих вертолетов
где под индексом "0" обозначены точные значения параметров, Δ - медленно меняющиеся во времени погрешности параметров.
БК8 реализован на семнадцати оптимальных корректирующих фильтрах (см. [4] , стр. 288), обеспечивающих компенсацию медленно меняющихся погрешностей Δ и подавление практически до нуля флюктуационных погрешностей  в БК8 формируются откорректированные значения параметров
в БК8 формируются откорректированные значения параметров 
которые с первого - семнадцатого выходов БК8 поступают на второй - восемнадцатый входы БВВ7, с сорок второго выхода которого вышеперечисленные параметры поступают через канал информационного обмена во все взаимодействующие системы и устройства для осуществления точной навигации, индикации, управления, наведения, при необходимости применения средств поражения по лоцируемым целям и передачи через СС3 на взаимодействующие вертолеты. При отключении режима локации запрограммированных целей (ориентиров) значения откорректированных параметров 
остаются точными в рамках соответствия реальных погрешностей их моделям, реализованных в оптимальных корректирующих фильтрах блока БК8.
Вход УПДЦ6 подключен к первому входу БВВ15 осуществляющего выбор координат местоположения вертолета  относительных координат наземных и воздушных подвижных целей, лоцируемых с другого взаимодействующего объекта,
относительных координат наземных и воздушных подвижных целей, лоцируемых с другого взаимодействующего объекта,  (здесь i - номер цели) и относительных координат взаимодействующих вертолетов
(здесь i - номер цели) и относительных координат взаимодействующих вертолетов  сигналы которых с первого - девятого выходов БВВ15 поступают на первый - девятый входы БАС16, на десятый - n-ый входы которого поступают корректирующие сигналы U10,...,U1k; U20,..., U2k; U30,..., U3k.
сигналы которых с первого - девятого выходов БВВ15 поступают на первый - девятый входы БАС16, на десятый - n-ый входы которого поступают корректирующие сигналы U10,...,U1k; U20,..., U2k; U30,..., U3k.
В БАС16 формируются сигналы траектории целей
и сигналы
где точные координаты траекторий целей представляются степенным рядом  флюктуационные центрированные погрешности измеряемых сигналов X2цi, Z2цi, H2цi, при этом n = 3K + 13.
флюктуационные центрированные погрешности измеряемых сигналов X2цi, Z2цi, H2цi, при этом n = 3K + 13.
Сигналы m1, m2, m3 с первого - третьего выходов БАС16 поступают на первый - третий входы БУ17.
В БФФВ19 формируются сигналы функций времени F1, F2,...,Fm (здесь m = K + 1), которые с первого -m-ого выходов БФФВ19 поступают на четвертый -(m+4)-ый входы БУ17, на первом - третьем выходах которого формируются сигналы m1•Fm, m2•Fm, m3•Fm, поступающие на первый - третий входы БИ18, формирующего сигналы интегралов
которые с первого - 3m-го выходов БИ18, поступают на (m+5)-ый - (4m+4)-ый входы БУ17, где формируются сигналы U10=Fк•V10, U20=Fк•V20, U30= Fк•V30, U11= Fк-1•V11, U21= Fк-1•V21, U31=Fк-1•V31,..., U1m=K0•V1m, U2m= K0•V2m, U3m=K0•V3m, которые с четвертого - (3m+4)-го выходов БУ17 поступают на десятый - (3m+10)-ый (n-ый) входы БАС16.
В замкнутом контуре коррекции с функциями времени F1,...,Fm, реализующими процедуру оптимальной фильтрации - подавления до нуля флюктуационных погрешностей  и быстрое выделение коэффициентов аппроксимации Aк, Bк, Cк (см, например, книгу [6], Солодовников В.В. "Теория автоматического управления", кн. 3, ч. 1, М.: Машиностроение, 1969 г., стр. 98),
и быстрое выделение коэффициентов аппроксимации Aк, Bк, Cк (см, например, книгу [6], Солодовников В.В. "Теория автоматического управления", кн. 3, ч. 1, М.: Машиностроение, 1969 г., стр. 98),
где с индексом "0" обозначены точные значения составляющих траекторного движения цели во времени.
Например, при к=1 для продольной составляющей
соответственно  и при
и при 
Дисперсия погрешности  при
при  центрированный белый шум (см. книгу [7] Бабич О.А. "Обработка информации в навигационных комплексах", М.: Машиностроение, 1991 г., стр. 49).
центрированный белый шум (см. книгу [7] Бабич О.А. "Обработка информации в навигационных комплексах", М.: Машиностроение, 1991 г., стр. 49).
d = d0(6t3+8tτ)•(t+τ)-4,
(здесь d0 - спектральная плотность белого шума  откуда следует, что с течением времени d (d0, t) ---> 0. С течением времени или при прекращении локации цели в БИ18 запоминаются коэффициенты Aк, Bк, Cк, и, соответственно, осуществляется прогнозирование движения цели во времени.
откуда следует, что с течением времени d (d0, t) ---> 0. С течением времени или при прекращении локации цели в БИ18 запоминаются коэффициенты Aк, Bк, Cк, и, соответственно, осуществляется прогнозирование движения цели во времени.
С четвертого-шестого выходов БАС 16 сигналы составляющих траектории движения цели  поступают на второй-четвертый входы БВВ15, с десятого выхода которого через выход УПДЦ6 эти сигналы поступают в канал информационного обмена.
поступают на второй-четвертый входы БВВ15, с десятого выхода которого через выход УПДЦ6 эти сигналы поступают в канал информационного обмена.
На вход УМНПЦ5 поступают сигналы параметров  с выхода УККК4, сигналы параметров вновь обнаруженных воздушных или наземных целей с первого и второго (любого взаимодействующего) вертолета - D1цi, ϕ1цi, θ1цi, D2цi, ϕ2цi, θ2цi, сигналы параметров
с выхода УККК4, сигналы параметров вновь обнаруженных воздушных или наземных целей с первого и второго (любого взаимодействующего) вертолета - D1цi, ϕ1цi, θ1цi, D2цi, ϕ2цi, θ2цi, сигналы параметров  с выхода УПДЦ6, поступающие со входа УМНПЦ5 (см. фиг. 3) на вход БВВ11. При этом возможна ситуация отсутствия информации о дальностях D1цi, D2цi до цели обоих взаимодействующих объектах, например, при неработоспособности дальномерных каналов, при постановке противником помех или при отключении дальномерных каналов для уменьшения возможности обнаружения вертолетов средствами противодействия, тогда в БВВ11 осуществляется выборка параметров
с выхода УПДЦ6, поступающие со входа УМНПЦ5 (см. фиг. 3) на вход БВВ11. При этом возможна ситуация отсутствия информации о дальностях D1цi, D2цi до цели обоих взаимодействующих объектах, например, при неработоспособности дальномерных каналов, при постановке противником помех или при отключении дальномерных каналов для уменьшения возможности обнаружения вертолетов средствами противодействия, тогда в БВВ11 осуществляется выборка параметров 
 которые с первого-девятого выходов БВВ11 поступают на первый-девятый входы БПК3 (13), осуществляющего формирование параметров D1цi (П), D2цi (П), здесь П - параметры, поступившие в БПК3 (13).
которые с первого-девятого выходов БВВ11 поступают на первый-девятый входы БПК3 (13), осуществляющего формирование параметров D1цi (П), D2цi (П), здесь П - параметры, поступившие в БПК3 (13).
Например в горизонтальной плоскости при θ1цi = θ2цi = 0
Сигналы D1цi (П), D2цi (П) с первого и второго выходов БПК3 (13) поступают на третий и четвертый входы БВВ11.
При пропаданиях информации D1цi, ϕ1цi, θ1цi, например, из-за затенения целей рельефом местности (эффект мерцающей цели) на первом взаимодействующем вертолете в БВВ11 осуществляется выборка параметров  которые с десятого-восемнадцатого выходов БВВ11 поступают на первый-восьмой входы БПК1(10), осуществляющего формирование параметров
которые с десятого-восемнадцатого выходов БВВ11 поступают на первый-восьмой входы БПК1(10), осуществляющего формирование параметров  здесь П - параметры, поступившие в БПК1 (10).
здесь П - параметры, поступившие в БПК1 (10).
Например, в горизонтальной плоскости при θ1цi = θ2цi = 0
Параметры  с первого-третьего выходов БПК1(10) поступают на пятый-седьмой входы БВВ11. Параметры
с первого-третьего выходов БПК1(10) поступают на пятый-седьмой входы БВВ11. Параметры  с девятнадцатого - двадцать седьмого выходов БВВ11 поступают на первый-девятый входы БАС14, формирующем сигналы
с девятнадцатого - двадцать седьмого выходов БВВ11 поступают на первый-девятый входы БАС14, формирующем сигналы  которые с первого - шестого выхода БАС14 поступают на восьмой - тринадцатый входы БВВ11 и на первый - шестой входы БПК2 (12), на седьмой - двенадцатый входы которого поступают сигналы
которые с первого - шестого выхода БАС14 поступают на восьмой - тринадцатый входы БВВ11 и на первый - шестой входы БПК2 (12), на седьмой - двенадцатый входы которого поступают сигналы  с двадцать восьмого - тридцать третьего выходов БВВ12. БПК2 преобразует линейные координаты целей относительно вертолетов в полярные
с двадцать восьмого - тридцать третьего выходов БВВ12. БПК2 преобразует линейные координаты целей относительно вертолетов в полярные  здесь П - параметры, поступившие в БПК2 (12), например в горизонтальной плоскости при
здесь П - параметры, поступившие в БПК2 (12), например в горизонтальной плоскости при  Сигналы
Сигналы  с первого-шестого выходов БПК2 (12), поступают на четырнадцатый-девятнадцатый входы БВВ11, с тридцать четвертого выхода которого сигналы дальностей до пассивно-лоцируемых целей - D1цi (П), D2цi (П), дальностей и углов визирования мерцающих целей -
с первого-шестого выходов БПК2 (12), поступают на четырнадцатый-девятнадцатый входы БВВ11, с тридцать четвертого выхода которого сигналы дальностей до пассивно-лоцируемых целей - D1цi (П), D2цi (П), дальностей и углов визирования мерцающих целей -  дальностей и углов визирования невидимых целей -
дальностей и углов визирования невидимых целей - 
 поступающих через выход БВВ11 и через канал информационного обмена в подключенные системы ПНС1, ИОС2, СС3 для целеуказания, применения средств противодействия, управления вертолетом, индикации и передачи по каналу радиосвязи СС3 на взаимодействующие вертолеты, наземные и воздушные пункты наведения и применения средств поражения.
поступающих через выход БВВ11 и через канал информационного обмена в подключенные системы ПНС1, ИОС2, СС3 для целеуказания, применения средств противодействия, управления вертолетом, индикации и передачи по каналу радиосвязи СС3 на взаимодействующие вертолеты, наземные и воздушные пункты наведения и применения средств поражения.
Таким образом вновь введенные блоки УККК4, УМНПЦ5, УПДЦ6, реализация которых возможна в вычислительных модулях бортовых вычислительных машин, обеспечивают скрытное боевое применение группы ударных вертолетов по пассивно-лоцируемым целям, группы ударных и разведывательных вертолетов по мерцающим и невидимым целям, что значительно расширяет функциональные возможности комплекса и, следовательно ведет к уменьшению вероятности обнаружения средствами противодействия, повышению показателей безопасности и боевой эффективности выполнения координированных фронтовых операций вертолетами авиации сухопутных войск.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| ИНТЕГРИРОВАННЫЙ БОРТОВОЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ВЕРТОЛЕТА | 2002 |
|
RU2204504C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2120885C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759057C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
Комплекс используется в авиастроении для оснащения и обеспечения боевых действий групп ударных и разведывательных вертолетов. Комплекс боевого группового взаимодействия содержит на борту взаимодействующих вертолетов взаимосоединенные прицельно-навигационную систему, систему связи с взаимодействующими вертолетами и наземными и воздушными объектами наведения и применения средств поражения и индикационно-отрабатывающую систему, устройство формирования и коррекции курса и координат взаимодействующих вертолетов, устройство формирования координат мерцающих, невидимых и пассивно-лоцируемых целей и устройство формирования траектории движения подвижных наземных и воздушных целей. Обеспечены режимы скрытного целеуказания и применения средств поражения, что расширяет функциональные возможности комплекса и соответственно повышает показатели безопасности и боевой эффективности групп ударных и разведывательных вертолетов при выполнении координированных фронтовых операций. 3 з.п. ф-лы, 4 ил.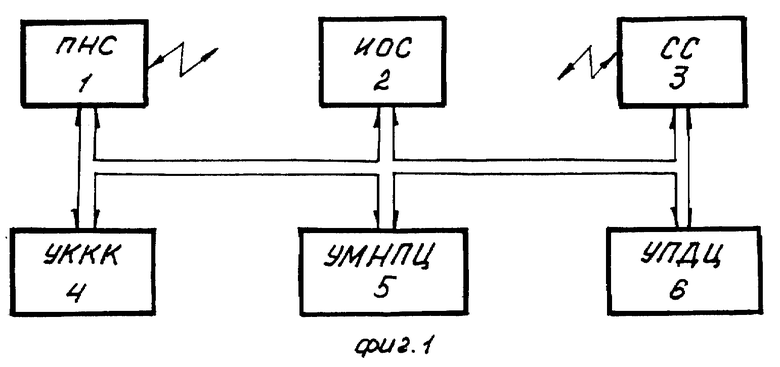
| Гришутин В.Г | |||
| Лекции по авиационным системам стрельбы | |||
| - Киев: КВВИУ, 1980, с.336 | |||
| Способ мезотерапевтического омоложения кожи пациента с применением композиции для омоложения кожи на основе тирозил-D-аланил-глицил-фенилаланил-лейцил-аргинина | 2024 |
|
RU2835298C1 |
| Офтальмометр | 1961 |
|
SU142056A1 |

