Изобретение относится к испытательной технике и сельскохозяйственному машиностроению и может быть использовано при определении динамических параметров, в частности момента инерции и приведенной жесткости подвески сельскохозяйственных транспортно-технологических агрегатов на базе тракторов или самоходных шасси.
Известен способ определения динамических параметров, в частности момента инерции транспортной машины, заключающийся в том, что машину размещают на упругих элементах, приводят ее в колебательное движение, измеряют частоту собственных колебаний, присоединяют к ней эталонную массу, повторно измеряют собственную частоту полученной системы и по результатам измерений определяют момент инерции (см. Гернет М. М., Ратобыльский В.Ф. Определение моментов инерции. - М.: Машиностроение, 1969.- С.177).
К причинам, препятствующим достижению требуемого технического результата при определении динамических параметров машины, в частности момента инерции, относится невозможность определения приведенной жесткости, а также методическая погрешность, обусловленная влиянием сопротивления колебаниям машины на измеряемую частоту колебаний системы.
Известны методы определения динамических параметров агрегатов, предусматривающие введение калиброванного упругого звена между стойкой и агрегатом, а также определение периода малых свободных колебаний полученной системы (см. SU, авторское свидетельство, N 300795. М. кл. G 01 M 1/40 Способ определения момента инерции механизма //Л.Т. Овакимян. Заявлено 10.10.1969, опубликовано 07.04.1971).
Недостатком метода является необходимость в дополнительной калиброванной пружине, погрешности, связанные с ее использованием, а также ограниченные функциональные возможности.
Известен также способ определения момента инерции подрессоренных масс, в котором транспортное средство закрепляют на стенде с шарнирной и упругой опорами, приводят в колебательное движение и определяют период колебаний, определяют положение центра тяжести машины и с его учетом вычисляют величину момента инерции. Этот способ реализуется стендом для определения момента инерции подрессоренных масс транспортных средств, содержащим основание, на котором размещены шарнирная и упругая опоры для испытуемого средства, в котором, с целью упрощения конструкции и повышения точности определения момента инерции, а также обеспечения возможности определения центра тяжести без перестановки транспортного средства, каждая из опор снабжена устройством, предназначенным для закрепления транспортного средства, датчиком определения реакции в ней и механизмом для блокировки датчика (см. SU, авторское свидетельство, N 518665. М.кл.2 G 01 М 1/10. Стенд для определения момента инерции подрессоренных масс транспортных средств //С.И.Горфинкель, В.Ф.Ратобыльский. Заявлено 02.04.1973, опубликовано 25.06.1976).
Недостатком способа является влияние погрешности тарировки упругой опоры, проводимой без учета податливости рамы транспортного средства, а также ограниченные функциональные возможности.
Известен также подъемник для вывешивания автомобиля, содержащий смонтированное на фундаменте неподвижное основание, на котором закреплена поперечина с поворотным подхватом для вывешивания элементов автомобиля, в котором, с целью упрощения конструкции подъемника, подхваты выполнены в виде поворотной катушки с резиновыми ободками, которая снабжена жестко закрепленным на ней храповым колесом, а на поперечине закреплена собачка, взаимодействующая с храповым колесом, при этом на фундаменте выполнены выемки для колес автомобиля (см. SU, авторское свидетельство, N 628014. М.кл.2 В 60 S 9/02, В 66 F 7/26. Подъемник для вывешивания автомобиля //В.А.Харитонашвили. Заявлено 23.02.1977, опубликовано 15.10.1978).
Описанное устройство позволяет лишь вывесить передний мост автомобиля. Однако оно не обеспечивает проведение исследований по количественной оценке динамических параметров как отдельной машины, так и агрегата из нескольких машин. Наиболее близким способом того же назначения к заявленному объекту по совокупности признаков является способ определения момента инерции транспортной машины, заключающийся в том, что машину размещают на упругих элементах, приводят ее в колебательное движение, измеряют частоту собственных колебаний, присоединяют к ней эталонную массу, повторно измеряют собственную частоту полученной системы и по результатам измерения определяют момент инерции, при этом, с целью расширения функциональных возможностей за счет определения приведенной жесткости подвески машин, имеющих дополнительные шарнирные выносные опоры, в качестве упругих элементов используют шины и подвеску машины, причем последнюю приводят в колебательное движение вокруг оси, проходящей через шарниры выносных опор в их рабочем положении (см. SU, авторское свидетельство, N 1265504, МПК4 G 01 М 1/10. Способ определения момента инерции транспортной машины //Строков В.Л., Рогачев А.Ф. Заявлено 17.07.1985, опубликовано 23.10.1986).
К причинам, препятствующим достижению требуемого технического результата при использовании известного способа, относятся наличие методической погрешности, обусловленной влиянием сопротивления колебаниям машины на измеряемую частоту колебаний системы, особенно без дополнительной массы, и, следовательно, недостаточная точность определения момента инерции транспортной машины и ее приведенной жесткости.
Сущность изобретения заключается в следующем.
Задача, на решение которой направлено заявляемое изобретение, - повышение точности определения динамических параметров путем устранения методической погрешности, связанной с влиянием внутренних сопротивлений на свободные колебания транспортной машины.
Технический результат - повышение точности определения момента инерции и приведенной жесткости.
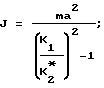
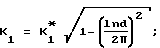
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе определения динамических параметров, в частности момента инерции и жесткости подвески сельскохозяйственного транспортно-технологического агрегата, заключающемся в том, что агрегат размещают на упругих опорах, вывешивают на жестких шарнирных опорах и приводят в колебательное движение, измеряют частоту собственных колебаний, присоединяют к нему эталонную массу, повторно измеряют собственную частоту полученной системы и по результатам измерений определяют момент инерции и жесткость подвески, в процессе колебаний вывешенного на жестких шарнирных опорах агрегата регистрируют усилия под одной из его упругих опор, после чего измеряют частоты получаемых колебаний, при этом частоту собственных колебаний агрегата по крайней мере без дополнительной массы, определяют по измеренному значению ее с учетом величины декремента затухания, рассчитанной на основе полученных данных; момент инерции и жесткость подвески агрегата определяют с учетом измеренной частоты колебаний системы с эталонной массой и уточненного значения частоты собственных колебаний агрегата по формулам:

где J - искомый момент инерции агрегата, кг•м2;
m - величина эталонной массы, кг;
a - расстояние от оси, проходящей через шарнирную опору, до центра эталонной массы, м;
k1 * и k2 * - измеренные частоты собственных колебаний агрегата соответственно без эталонной массы и с эталонной массой, с-1;
k1 - уточненная частота собственных колебаний агрегата без эталонной массы, с-1;
d - измеренное значение декремента затухания собственных колебаний;
с - расчетная жесткость подвески агрегата, кг/с2.
При определении в поперечно-вертикальной плоскости динамических параметров агрегатов с продольной плоскостью симметрии двухконсольных дождевальных машин жесткие шарнирные опоры располагают в продольной плоскости симметрии агрегата; при определении в продольной плоскости динамических параметров агрегатов с навесным дальнеструйным дождевателем шарнирную опору размещают соосно ведущему элементу движителя агрегата.
Учет влияния диссипативных свойств системы на величины частот собственных колебаний позволяет с большей точностью и надежностью определить их величины и, следовательно, вычисляемые с их использованием динамические параметры системы, чем достигается указанный выше технический результат.
Проведенный заявителями анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителями не обнаружен аналог, характеризующийся признаками, идентичными всем признакам заявленного изобретения. Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию "изобретательского уровня" заявители провели дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного Заявителями, не выявлено влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение технического результата.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень" по действующему законодательству.
Изобретение поясняется чертежами.
На фиг. 1 изображена расчетная схема определения динамических параметров, в частности момента инерции и жесткости подвески, сельскохозяйственного транспортно-технологического агрегата.
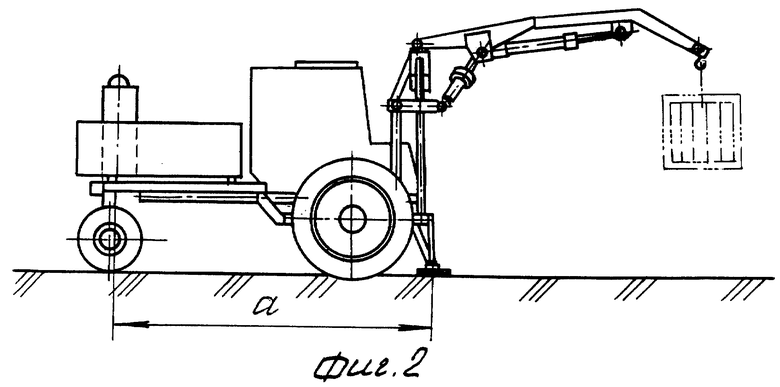
На фиг. 2 изображена схема определения динамических параметров, в частности момента инерции и жесткости подвески, сельскохозяйственного погрузочно-транспортного агрегата с выносными опорами, вид сбоку, с эталонной массой, размещенной на расстоянии а от оси шарниров выносных опор.
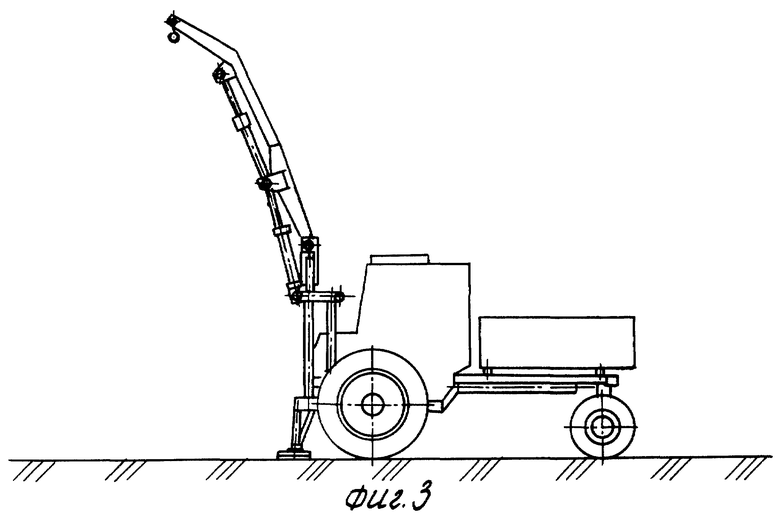
На фиг. 3 - то же, но без эталонной массы.
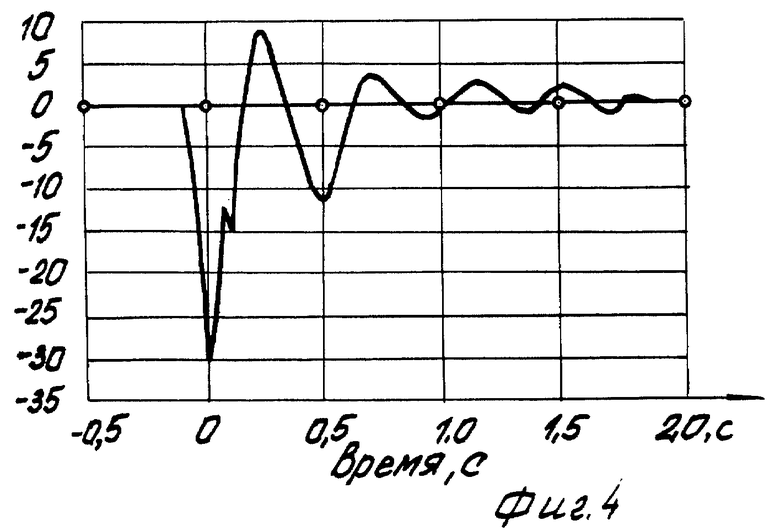
На фиг. 4 представлена осциллограмма усилий под одной из упругих опор агрегата без эталонной массы.
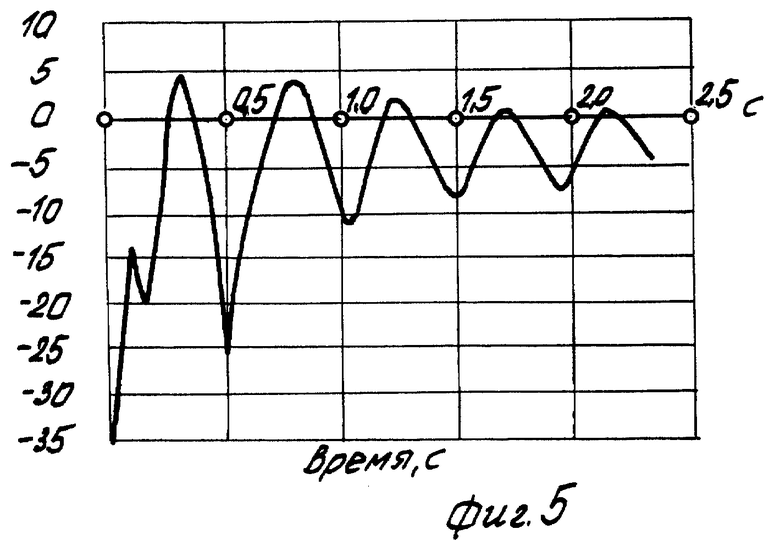
На фиг. 5 - то же, для системы, образованной агрегатом с эталонной массой.
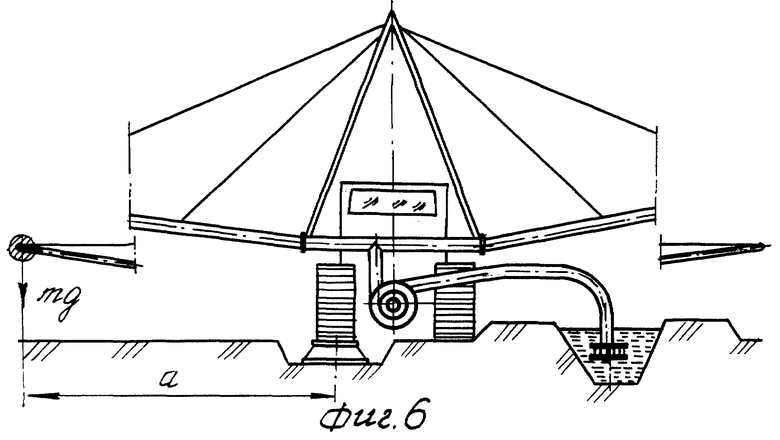
На фиг. 6 - схема определения динамических параметров двухконсольного дождевального агрегата ДДА-100МА на базе гусеничного трактора ВТ-100, вид сзади.
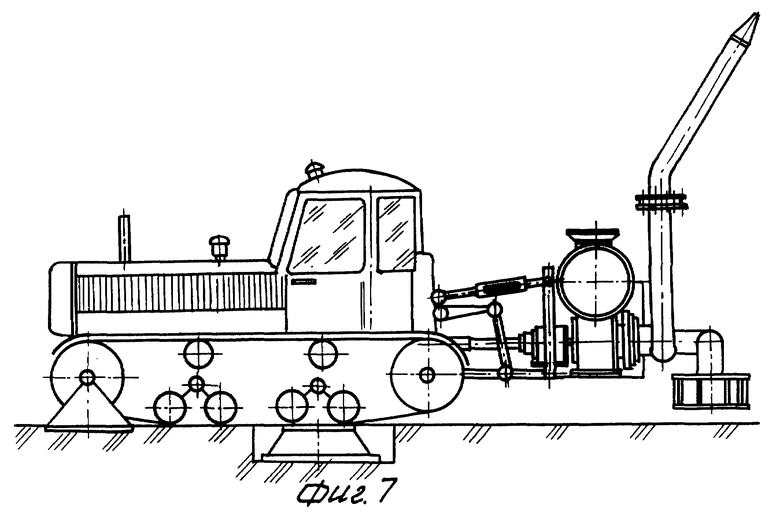
На фиг. 7 - то же, для навесного дальнеструйного дождевателя ДДН-100, вид сбоку.
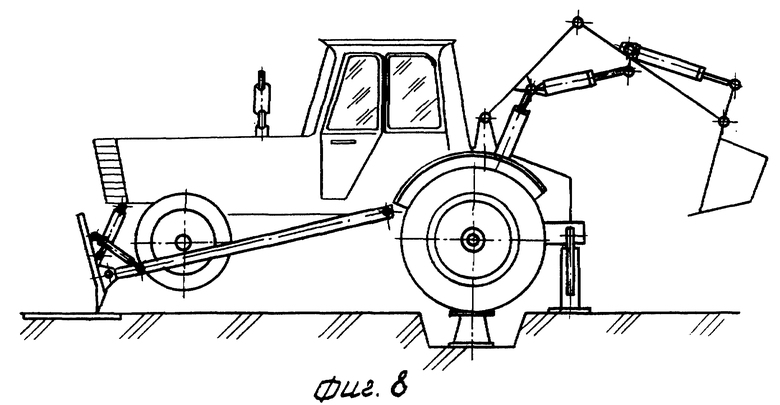
На фиг. 8 - схема определения динамических параметров навесного экскаватора ЭО-2621А (ПЭ-0,8; ПЭА-1,0) на базе колесного трактора МТЗ-100/102, вывешенного на бульдозерном отвале, вид сбоку.
Сведения, подтверждающие возможность осуществления изобретения, заключаются в следующем.
Сущность заявленного способа заключается в следующем. Испытуемый агрегат размещают на упругих опорах. Далее вывешивают на жестких шарнирных опорах и приводят в колебательное движение. Одновременно с этим измеряют частоту собственных колебаний. Присоединяют к испытуемому агрегату эталонную массу. Повторно измеряют собственную частоту колебаний полученной системы - "агрегат + эталонная масса" - и по результатам измерений определяют момент инерции и жесткость подвески. Точность экспериментальных данных достигнута тем, что в процессе колебаний вывешенного на жестких шарнирных опорах агрегата регистрируют усилия под одной из его упругих опор, после чего измеряют частоты получаемых колебаний. Частоту собственных колебаний испытуемого агрегата по крайней мере без дополнительной массы, определяют по измеренному значению ее с учетом величины декремента затухания, рассчитанной на основе полученных данных. На основе полученных данных производят аналитические расчеты величин момента инерции и жесткости подвески агрегата с учетом измеренной частоты колебаний системы с эталонной массой и уточненного значения частоты собственных колебаний агрегата по приведенным выше формулам. Рассмотрим несколько примеров реализации заявленного способа.
Пример 1. Рассмотрим порядок определения динамических параметров погрузочно-транспортного манипулятора на базе самоходного шасси.
Сельскохозяйственный транспортно-технологический агрегат, в частности погрузочно-транспортный на базе самоходного шасси Т-16М, устанавливают на горизонтальную площадку и вывешивают на шарнирной опоре с горизонтально расположенной осью вращения, например образуемой двумя штатными выносными опорами, до создания предварительной вертикальной нагрузки на шарнирные опоры, образующие ось колебательного движения агрегата согласно схеме на фиг. 1. Поскольку агрегат на собственных упругих и дополнительной шарнирной опоре образует статически неопределенную систему, то предварительное вывешивание его на шарнирной опоре позволяет обеспечить знакопостоянные усилия на всех опорах в процессе собственных колебаний его в области линейности характеристик упругих опор. Под одной или несколькими упругими опорами - колесами размещают датчики усилий (фиг. 2). Последние посредством 10-канального полупроводникового тензоусилителя постоянного тока "Топаз" соединяют с регистрирующим прибором, например пишущим осциллографом Н044.1 с шириной фотобумаги до 120 мм. Питание осциллографа осуществлялось через аккумулятор для устранения сетевых наводок.
После этого возбуждают свободные колебания агрегата на упругих шинах и подвеске относительно оси, проходящей через шарниры выносных опор. Наиболее простым способом возбуждения свободных колебаний в этом случае является резкое снятие нагрузки на крюке. Собственные колебания (частотой 2-4 с-1) регистрируют светолучевым осциллографом на скорости движения светочувствительной бумаги 25-50 мм/с (фиг. 4 и табл. 1).
Затем на агрегате жестко закрепляют эталонную массу m на определенном расстоянии а от оси, проходящей через шарниры выносных опор (фиг. 3). В частности, для погрузчика на самоходном шасси типа Т-16М достаточно массы m = 100-200 кг на расстоянии а = 1-3 м. После этого повторно измеряют частоту свободных колебаний полученной системы (фиг. 5). Для обеспечения заданной точности каждый из вариантов измерений выполняют в требуемой повторности.
По осциллограммам (фиг. 4 и 5) определяют частоты собственных колебаний непосредственно агрегата (фиг. 2) и системы, дополненной эталонной массой (фиг. 3), а также декремент затухания колебаний по крайней мере для варианта без эталонной массы ввиду более существенного затухания их во времени. После этого последовательно вычисляют динамические параметры сельскохозяйственного транспортно-технологического агрегата по аналитическим зависимостям
где J - искомый момент инерции агрегата, кг•м2;
m - величина эталонной массы, кг;
а - расстояние от оси, проходящей через шарнирную опору, до центра эталонной массы, м;
k1 * и k2 * - измеренные частоты собственных колебаний агрегата соответственно без эталонной массы и с эталонной массой, с-1;
k1 - уточненная частота собственных колебаний агрегата без эталонной массы, с-1;
d - измеренное значение декремента затухания собственных колебаний;
с - определяемая жесткость подвески агрегата, кг/с2.
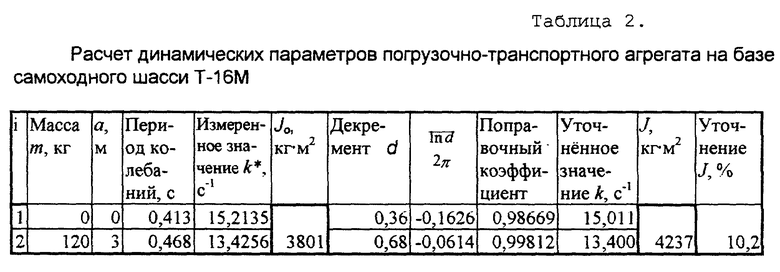
Результаты расчетов динамических параметров по формулам (1) и (2) сведены в табл. 2, где для наглядности приведены расчеты момента инерции J0 - без учета затухания, J - с учетом величины декремента затухания, а также процент уточнения ее величины с учетом величины декремента затухания. Из таблицы видно, что за счет учета влияния затухания на частоту измеряемых колебаний уточнение величины момента инерции составляет более 10%.
Пример 2.
При определении в поперечной плоскости динамических параметров агрегатов с продольной плоскостью симметрии, например двухконсольных дождевальных машин ДДА-100МА (фиг. 6), неподвижную ось колебательного движения располагают горизонтально в продольной плоскости симметрии агрегата, что уменьшает затухание регистрируемых колебаний за счет снижения приведенной к оси вращения агрегата жесткости его подвески и соответственно собственной частоты регистрируемых колебаний. В этом случае колебания можно возбуждать смещением конца одной из консолей в вертикальном направлении и резким освобождением его. При проведении исследований на полевой сборочной площадке для этого можно использовать мобильный погрузчик или гидроманипулятор.
Пример 3.
При определении в продольной плоскости динамических параметров агрегатов, например с навесным дальнеструйным дождевателем ДДН-100, шарнирную опору размещают соосно ведущему элементу движителя транспортного средства агрегата, например оси ведущих звездочек гусеничного трактора (фиг.7), или ведущих полуосей колесного, что позволяет использовать шарнирные узлы с подшипниками качения и низким трением. Для возбуждения собственных колебаний свободный конец агрегата подвешивают на соответствующем грузоподъемном средстве и резко освобождают.
Пример 4.
Агрегат, содержащий штатные управляемые опорные элементы, в частности шарнирные выносные опоры (фиг.2) или легко образующие шарнирную опору, например бульдозерный отвал (фиг.8), вывешивают с их помощью. В последнем случае под нижним срезом бульдозерного отвала экскаватора ЭО-2621 размещают жесткую металлическую площадку, образующую с нижней кромкой отвала вращательную пару с пониженным моментом сопротивления вращению агрегата относительно площадки (см. фиг. 8).
Для раздельного определения жесткостей передних и задних пар упругих элементов подвески агрегат вывешивают с их помощью до отрыва от опорной площадки по крайней мере одной пары упругих опор (см. фиг. 8) и выполняют все вышеперечисленные операции как для вывешенного таким образом положения, так и для случая опирания на все упругие опоры. В первом случае будет определена жесткость части подвески, на которую производилось фактическое опирание агрегата, а во втором - всей подвески в целом.
Описанный способ определения динамических параметров транспортно-технологических агрегатов позволяет существенно повысить точность измеряемых параметров.
Таким образом, изложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
способ, воплощающий заявленное изобретение при его осуществлении, предназначен для использования в транспортном машиностроении;
для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов;
способ, воплощающий заявленное изобретение при его осуществлении, способен обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость" по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1997 |
|
RU2118479C1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ СЕКЦИЙ МНОГООПОРНЫХ ДОЖДЕВАЛЬНЫХ МАШИН ФРОНТАЛЬНОГО И КРУГОВОГО ДЕЙСТВИЯ | 1997 |
|
RU2130175C1 |
| Способ определения момента инерции транспортной машины | 1985 |
|
SU1265504A1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ И ТЕХНОЛОГИЧЕСКИХ ИСПЫТАНИЙ ДОЖДЕВАЛЬНЫХ МАШИН | 1998 |
|
RU2133018C1 |
| КУЛЬТИВАТОР | 1998 |
|
RU2141182C1 |
| УСТРОЙСТВО ДЛЯ ВЫКОПКИ КОРНЕВОЙ МАССЫ ЛАКРИЦЫ | 1999 |
|
RU2150806C1 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 1998 |
|
RU2130251C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| СПОСОБ НАКОПЛЕНИЯ ВЛАГИ В ПОЧВЕ ПРИ ВОЗДЕЛЫВАНИИ ОЗИМОЙ ПШЕНИЦЫ В УСЛОВИЯХ ОРОШЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2172577C2 |

Использование - в сельскохозяйственном и транспортном машиностроении. Сущность изобретения: способ определения динамических параметров, в частности момента инерции транспортной машины, заключается в том, что сельскохозяйственную машину в агрегате с транспортным средством размещают на упругих шарнирных опорах, приводят ее в колебательное движение. Измеряют частоту собственных колебаний. Присоединяют к ней эталонную массу. Повторно измеряют собственную частоту полученной системы. Агрегат предварительно вывешивают на шарнирной опоре, в процессе его колебаний регистрируют усилия под одной из упругих опор, после чего измеряют частоты получаемых колебаний, а частоту собственных колебаний агрегата, по крайней мере без дополнительной массы, определяют по измеренному значению ее с учетом величины декремента затухания, рассчитанной на основе полученных данных. Технический результат - повышение точности определения момента инерции и приведенной жесткости. 3 з.п. ф-лы, 8 ил., 2 табл.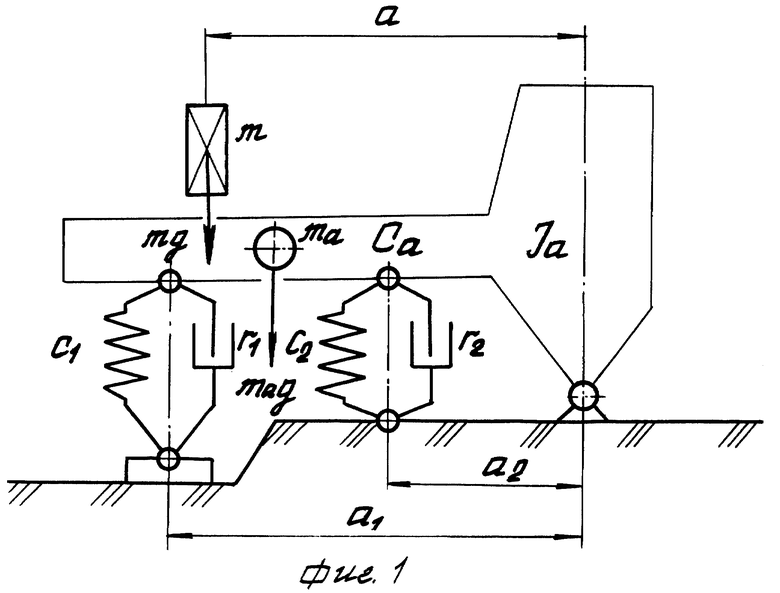

где J - искомый момент инерции агрегата, кг • м2;
m - величина эталонной массы, кг;
а - расстояние от оси, проходящей через шарнирную опору, до центра эталонной массы, м;
K1* и K2* - измеренные частоты собственных колебаний агрегата соответственно без эталонной массы и с эталонной массой, с-1;
K1 - уточненная частота собственных колебаний агрегата без эталонной массы, с-1;
d - измеренное значение декремента затухания собственных колебаний;
с - расчетная жесткость подвески агрегата, кг/с2.
| Способ определения момента инерции транспортной машины | 1985 |
|
SU1265504A1 |
| Стенд для определения момента инерции подрессорных масс транспортных средств | 1973 |
|
SU518665A1 |
| Устройство для дорожных испытаний ходовой части колесного транспортного средства | 1989 |
|
SU1663479A1 |
| Стенд для исследования колебательных процессов транспортных средств | 1987 |
|
SU1464106A2 |
| Стенд для испытания транспортных средств | 1986 |
|
SU1364944A1 |
