Изобретение относится к области гидроакустики и может быть использовано для обнаружения и обследования бесшумных или слабошумящих подводных объектов: их геометрических размеров, состояния поверхности, направления и скорости перемещения.
Известен способ аналогичного назначения [1], заключающийся в том, что слабошумящий подводный объект облучают лазерным лучом с полой сердцевиной. Этот луч формирует в воде звукопроводный канал. Внутри звукопроводного канала на поверхности жидкости располагают гидроакустический приемник, а на дне - обследуемый объект. Звуковые волны от слабошумящего объекта по звукопроводному каналу достигают гидроакустического приемника, позволяя выявить параметры объекта.
Недостатком способа [1] является невозможность с его помощью осуществить обследование бесшумных подводных объектов.
Известен термооптический способ обследования подводного объекта [2], заключающийся в облучении объекта лазерным лучом в виде последовательности лазерных импульсов и приеме звуковых волн, распространяющихся от нагретой лазерным лучом поверхности объекта гидроакустическим приемником, при последующем сканировании и пространственном перемещении лазерного луча по поверхности объекта.
Данный способ [2] принят за прототип. Согласно прототипу, подводный объект облучают лазерным лучом с полой сердцевиной. При этом поверхность объекта в месте облучения нагревается и становится источником звуковых волн. При сканировании лазерного луча сформированный им в воде звукопроводный канал пропускает звуковые волны к гидроакустическому приемнику, позволяя обследовать бесшумный подводный объект путем последующего перемещения лазерного луча по поверхности объекта.
Недостатком прототипа является необходимость наличия в оборудовании для реализации известного способа формирователя лазерного луча с полой сердцевиной. Это усложняет и удорожает реализацию известного способа.
Техническим результатом, получаемым от реализации изобретения является упрощение и удешевление известного термооптического способа за счет устранения из аппаратуры, реализующей способ формирователя лазерного луча с полой сердцевиной.
Данный технический результат достигают за счет того, что в известном термооптическом способе обследования подводного объекта, заключающемся в облучении обследуемого объекта лазерным лучом в виде последовательности лазерных импульсов и приеме звуковых волн, распространяющихся от нагретой лазерным лучом поверхности объекта гидроакустическим приемником, при последующем сканировании и пространственном перемещении лазерного луча по поверхности объекта, сканирование лазерного луча по поверхности объекта проводят со скоростью, равной скорости С звука в воде.
При этом прием звуковых волн, распространяющихся от нагретой лазерным лучом области объекта, проводят направленным гидроакустическим приемником.
Период Т следования лазерных импульсов в последовательности задают согласно математическому соотношению:
где а - диаметр поперечного сечения лазерного луча на поверхности подводного объекта.
Сканирование лазерного луча по поверхности объекта проводят по гармоническому закону:
X=A sinwt, (2)
где Х - смещение луча во времени t по поверхности объекта;
А и w - соответственно амплитуда и частота смещения, удовлетворяющие соотношению:
а облучение поверхности обследуемого объекта последовательностью лазерных импульсов проводят в моменты времени t1 и t2, задаваемые из соотношений:

причем период Т следования лазерных импульсов определяется из соотношения:
Длительность лазерных импульсов в последовательности задают не больше величины 10-5c.
Изобретение поясняется чертежом, на фиг.1 которого представлена общая схема реализации способа (не в масштабе), а на фиг.2, 3 - временные диаграммы, поясняющие существо способа.
На чертеже способ реализуется с подводного плавсредства 1, на котором расположена лазерная установка 2, снабженная как в прототипе модулятором, дефлектором и скана тором лазерного луча. В зависимости от глубины Н залегания обследуемого объекта 3 в натурном водоеме 4 в лазерной установке 2 как в прототипе используются лазеры на рубине или неодиме. (На чертеже модулятор, дефлектор и сканатор на показаны).
Прием звуковых волн 5, распространяющихся от нагретой лазерным лучом 6 поверхности 7 объекта 3, осуществляется с помощью направленного гидроакустического приемника, например гидроакустической антенной 8.
Термооптический способ обследования подводного объекта реализуется следующим образом.
С надводного плавсредства 1 на объект 3 с помощью лазерной установки 2 направляется сканируемый по поверхности объекта лазерный луч в виде последовательности лазерных импульсов, следующих с периодом  . При этом скорость V сканирования лазерного луча задается равной скорости звука в воде.
. При этом скорость V сканирования лазерного луча задается равной скорости звука в воде.
Данные режимы работы лазерной установки обеспечивают эффект накапливающего увеличения акустического давления в звуковой волне 5 благодаря тому, что лазерный луч 6 сопровождает бегущий звуковой импульс и непрерывно подпитывает его энергией. При этом путь Т•c, проходимый лазерным лучом 6 за период Т сканирования, должен быть больше или равен диаметру а сечения лазерного луча 6 на поверхности объекта 3 (фиг.2).
Если, например, диаметр а луча 6 равен ~ 0,3 м, то период Т должен быть  . В противном случае нагретые поверхности 7 подводного объекта 3 будут частично перекрываться и подпитка звуковых импульсов лазерной энергией будет неоптимальной.
. В противном случае нагретые поверхности 7 подводного объекта 3 будут частично перекрываться и подпитка звуковых импульсов лазерной энергией будет неоптимальной.
Кроме того, длительность τ лазерного импульса при скорости V сканирования, равной скорости звука С, должна быть такой, чтобы за время импульса τ лазерная энергия попадала практически на одно и то же место поверхности обследуемого объекта 3. То есть, чтобы за время τ лазерный импульс не размывался при перемещении лазерного луча 6 по поверхности объекта 3 со скоростью С. Для этого величина τC должна быть много меньше диаметра а лазерного луча. На практике, например, при а = 0,3 м данное соотношение выполняется при τ ≤ 10-5c.
Если сканирование лазерного луча 6 по поверхности объекта 3 проводится по гармоническому закону (2) с частотой, удовлетворяющей соотношению (3), то облучение обследуемого объекта 3 последовательностью лазерных импульсов целесообразно проводить только в моменты t1 и t2, удовлетворяющих соотношениям (4) и (5), причем период Т следования лазерных импульсов помимо соотношения (1) должен дополнительно удовлетворять соотношению (6).
Это связано с тем, что в данном случае необходимой скорости сканирования С можно достичь только в диапазонах фазовых соотношений:
Когда изменение фазы не превышает величины  , а начальная фаза устанавливается в точке
, а начальная фаза устанавливается в точке  (фиг.3). В этом случае замена функции sin wt на ее аргумент wt не превышает погрешности в скорости сканирования 2,5%. (На практике погрешности эксперимента).
(фиг.3). В этом случае замена функции sin wt на ее аргумент wt не превышает погрешности в скорости сканирования 2,5%. (На практике погрешности эксперимента).
Таким образом, в данном диапазоне
X≈Awt, (9)
т.е. частота w сканирования должна удовлетворять уравнению (3).
Это в свою очередь накладывает на период Т следования последовательности импульсов ограничение сверху, представленное неравенством (6). Амплитуда А гармонического сканирования должна быть такой, чтобы по крайней мере два импульса попадали на квазилинейный участок синусоиды.
Если амплитуду сканирования задать 1,5 м, то
С учетом (1) и предыдущих расчетов для данных условий 2•10-4c ≤ T ≤ l0-3c.
На фиг.3 представлены временные диаграммы, поясняющие выбор оптимальных режимов реализации способа для гармонического сканирования лазерного луча.
На фиг. 3,а показан закон смещения Х лазерного луча во времени t с амплитудой А.
На фиг. 3, б представлен закон внешней модуляции последовательности лазерных импульсов. (Блок внешней модуляции лазерного излучения на чертеже не показан).
На фиг.3,в представлен закон следования последовательности лазерных импульсов с периодом Т.
Импульсы проходят только в периоды времени t1 и t2, при этом t1=t2=t3.
При соблюдении заявленных режимов реализации способа на гидроакустическую антенну 8 (фиг.1) попадает акустический сигнал повышенной интенсивности в силу эффекта накапливающегося увеличения акустического давления, о котором упоминалось выше.
Обследовав участок L подводного объекта 3 (фиг.1,3а) с помощью дефлектора лазерной системы 2 (не показан), лазерный луч 6 смещают на соседний участок поверхности подводного объекта и указанные выше действия повторяют.
Если подводный объект движется, то рефлектор лазерной системы 2 осуществляет сопровождение цели.
Таким образом, практическая реализация способа позволяет получить поставленный технический результат без достаточно сложного и дорогого формирователя лазерного луча с полой сердцевиной, как в прототипе.
Источники информации
1. Патент 2125731 РФ, кл. G 01 S 3/80, 1999.
2. Патент 2115938 РФ, кл. G 01 S 3/80, 1998 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| ОПТИКО-АКУСТИЧЕСКИЙ ГИДРОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ БЕСШУМНЫХ ПОДВОДНЫХ ЦЕЛЕЙ В РЕЖИМЕ ПАССИВНОЙ ГИДРОАКУСТИКИ | 1997 |
|
RU2115938C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| ГИДРОЛОКАТОР ДЛЯ ОПТИКО-АКУСТИЧЕСКОГО ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 1997 |
|
RU2141676C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ СЛАБОШУМЯЩИХ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 1997 |
|
RU2125731C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЦИИ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2176401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2154841C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ЗАЩИТЫ ПОДВОДНОГО ПЛАВСРЕДСТВА ОТ ОБНАРУЖЕНИЯ ГИДРОЛОКАТОРОМ | 2001 |
|
RU2195684C1 |


Изобретение относится к области гидроакустики и может быть использовано для обнаружения и обследования бесшумных или слабошумящих подводных объектов в натурном водоеме. Сущность изобретения заключается в том, что обследуемый подводный объект облучают лазерным лучом в виде последовательности лазерных импульсов, нагревающих поверхность объекта. При этом место облучения становится источником звуковых волн, принимаемых направленным гидроакустическим приемником. Новым в способе является то, что лазерный луч сканируют по поверхности объекта со звуковой скоростью. Это позволяет за счет эффекта накапливающегося увеличения акустического давления, происходящего благодаря тому, что лазерный луч сопровождает бегущий световой импульс и непрерывно подпитывает его энергией получить на входе гидроакустического приемника сигнал повышенной амплитуды, что и является достигаемым техническим результатом. 2 з.п.ф-лы, 3 ил.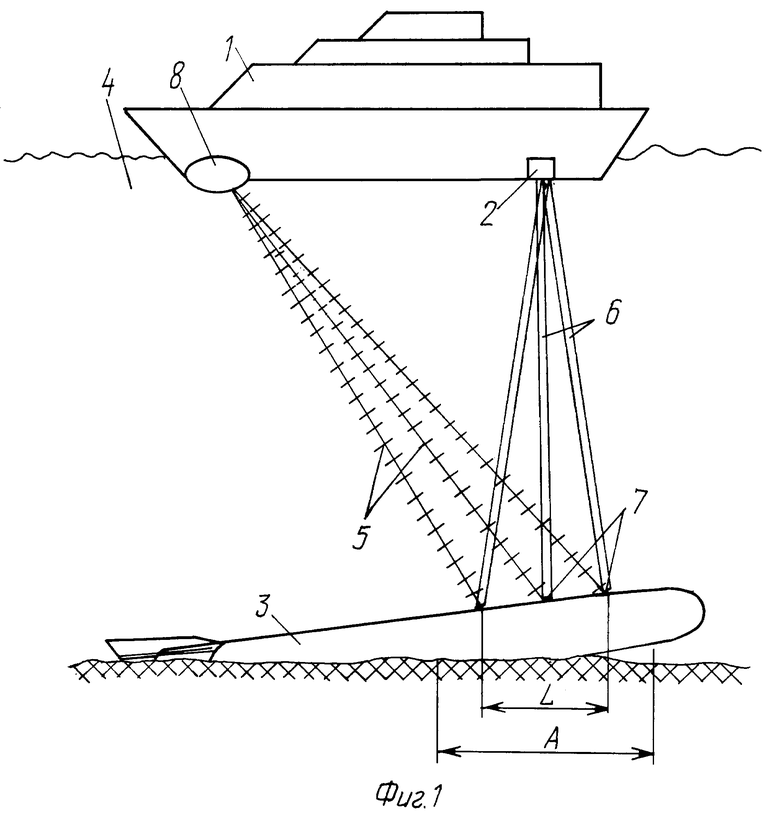

где а - диаметр поперечного сечения лазерного луча на поверхности подводного объекта, а длительность лазерных импульсов задают не больше величины 10-5c.
Х = A sin wt,
где X - смещение луча во времени t по поверхности объекта;
А и w соответственно амплитуда смещения и частота, удовлетворяющие соотношению
а облучение поверхности обследуемого объекта последовательностью, лазерных импульсов проводят в моменты времени t1 и t2, задаваемые из соотношений
причем период Т следования лазерных импульсов определяется из соотношения н
н
| ОПТИКО-АКУСТИЧЕСКИЙ ГИДРОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ БЕСШУМНЫХ ПОДВОДНЫХ ЦЕЛЕЙ В РЕЖИМЕ ПАССИВНОЙ ГИДРОАКУСТИКИ | 1997 |
|
RU2115938C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2008692C1 |
| US 5646907 А, 08.07.1997 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ СЛАБОШУМЯЩИХ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 1997 |
|
RU2125731C1 |
| US 6157591 А, 05.12.2000. | |||

