Изобретение относится к области гидроакустики и может быть использовано для обнаружения и идентификации слабошумящей подводной цели в охраняемой акватории.
Известен способ обнаружения подводной цели, заключающийся в сбрасывании специального взрывного заряда с летательного аппарата в охраняемую акваторию и прием эхо сигналов от цели с помощью гидроакустического приемника, расположенного на буе, и передачи их на летательный аппарат по радиоканалу [1].
Недостатком известного способа является невозможность с его помощью определить координаты цели и проводить ее идентификацию.
Известен способ обнаружения и идентификации подводной цели, заключающийся в облучении с летательного аппарата водной поверхности контролируемой акватории модулированным лазерным лучом в спектральном диапазоне длин волн (9-11) мкм и приеме модулированных акустических волн, отраженных от цели, гидроакустическим приемником, установленным на подводном плавсредстве, при последующей обработке информации с гидроакустического приемника бортовым компьютером, по результатам которой судят о пространственных координатах и технических характеристиках подводной цели [2].
Данный способ принят за прототип.
Недостатком прототипа являются большие погрешности в определении координат цели и вероятность ошибки при идентификации цели.
Техническим результатом, получаемым от внедрения изобретения, является повышение точности в определении пространственных координат цели и уменьшение вероятности ошибки при идентификации цели.
Данный технический результат достигают за счет того, что в известном способе обнаружения и идентификации подводной цели, заключающемся в облучении с летательного аппарата водной поверхности контролируемой акватории модулированным лазерным лучом в спектральном диапазоне длин волн (9-11) мкм и приеме модулированных акустических волн, отраженных от цели, гидроакустическим приемником, установленным на подводном плавсредстве, при последующей обработке информации с гидроакустического приемника бортовым компьютером, по результатам которой судят о пространственных координатах и технических характеристиках подводной цели, дополнительно с летательного аппарата облучают место предполагаемого расположения цели модулированным лазерным лучом в спектральном диапазоне длин волн (0,6-1,1) мкм, затем проводят угловые отклонения дополнительного лазерного луча до момента приема гидроакустическим приемником модулированных акустических волн, возбуждаемых поверхностью цели в месте ее облучения дополнительным лазерным лучом, после чего проводят обработку принятого сигнала бортовым компьютером и уточнение координат цели, затем с подводного плавсредства в уточненное место расположения цели направляют лазерный луч с полой сердцевиной от лазерной установки, работающей в импульсном режиме в спектральном диапазоне (0,6-1,1) мкм, затем проводят угловые отклонения дополнительного лазерного луча до момента приема гидроакустическим приемником модулированных акустических волн, возбуждаемых поверхностью цели в месте ее облучения дополнительным лазерным лучом, после чего проводят обработку принятого сигнала бортовым компьютером и уточнение координат цели, затем с надводного плавсредства в уточненное место расположения цели направляют лазерный луч с полой сердцевиной от лазерной установки, работающей в импульсном режиме в спектральном диапазоне (0,6-1,1) мкм, осуществляют перемещение этого лазерного луча по поверхности цели до момента появления на входе гидроакустического приемника, расположенного в полой сердцевине лазерного луча акустического сигнала, соответствующего работе ходовой части подводной цели и по данному сигналу после его обработки проводят идентификацию цели.
Кроме того, с летательного аппарата в место предполагаемого расположения подводной цели сбрасывают один или несколько радиофицированных буев положительной плавучести с гидроакустическими приемниками.
При этом частота повторения импульсов для лазерного луча с полой сердцевиной задается более 1 Гц.
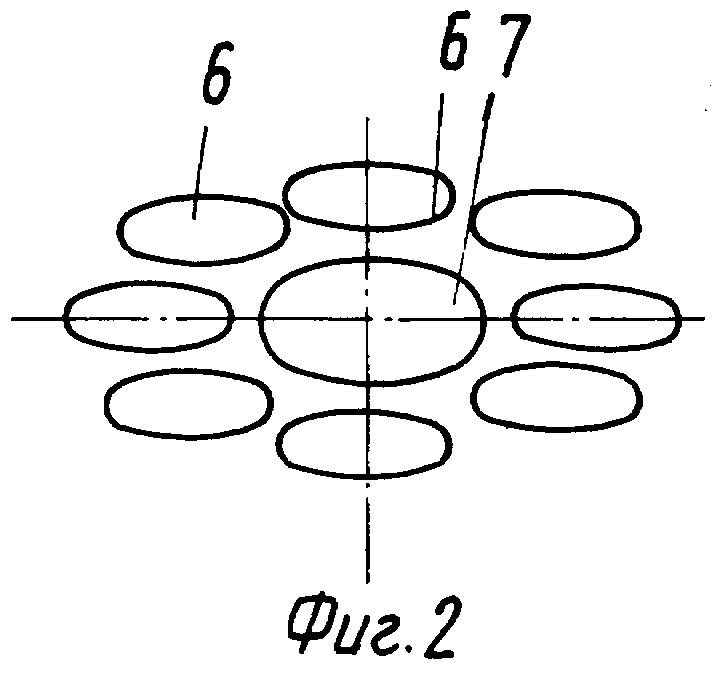
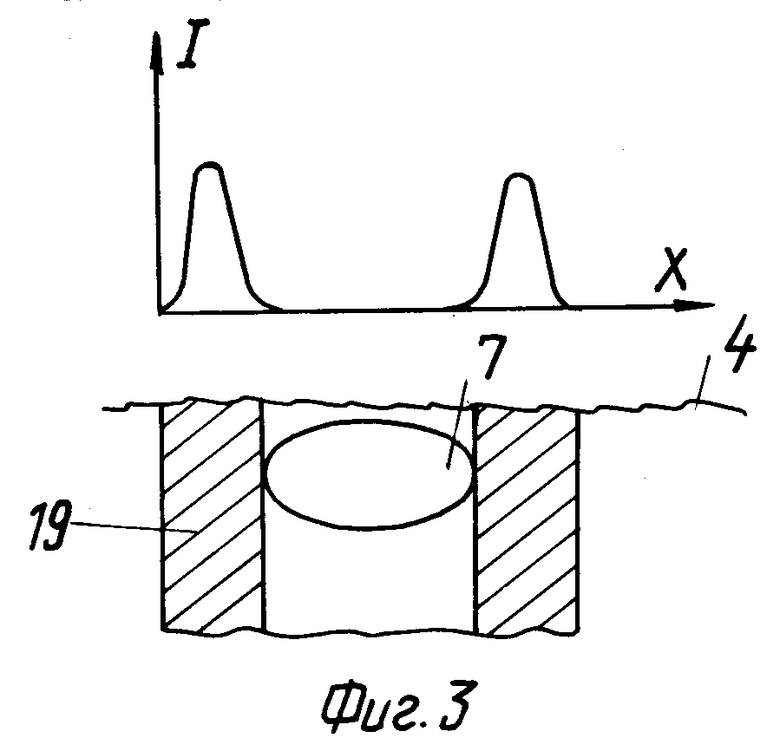
Изобретение поясняется чертежом, на фиг. 1 которого представлена схема реализации способа, на фиг. 2,3 - диаграммы, показывающие формирование в воде звукопроводного канала для идентификации цели.
Для реализации способа имеется подводное плавсредство 1 с палубным летательным аппаратом, например, вертолетом 2 (фиг. 1). Вертолет 2 снабжен двумя лазерными установками, обозначенными на фиг.1 под позицией 3. Одна из лазерных установок включает в себя лазер на углекислом газе, работающий на длине волны 10,6 мкм, другие лазеры на неодиме и рубине, работающие в режиме свободной генерации импульсов, соответственно на длинах волн 1,06 мкм и 0,69 мкм. Лазерные установки также включают в себя модуляторы и средства пространственного перемещения лазерных лучей по водной поверхности 4.
Надводное плавсредство 1 также содержит лазерную установку 5 для формирования лазерного луча с полой сердцевиной. Такая установка может быть выполнена, например, на основе нескольких лазеров на неодиме или рубине, выходы активных элементов 6 у которых расположены по кругу, как показано на фиг. 2. При этом в середине круга устанавливают гидрофон 7.
Система обнаружения цели 8 может также включать в себя буй 9 положительной плавучести с гидроакустическим приемником 10 (гидрофоном), сбрасываемым, например, с вертолета 2 в заданную область контролируемой морской акватории 11.
Электронные блоки надводного плавсредства 1 вертолета 2 и буя 9 связаны между собой по радиоканалу с помощью радиоантенн 12, 13, 14.
Способ обнаружения и идентификации подводной цели реализуется следующим образом.
С надводного плавсредства 1 к месту предполагаемого нахождения подводной цели 8 взлетает вертолет 2. Достигнув заданного места акватории, на вертолете 2 включается лазерная установка на углекислом газе. При этом вся лазерная энергия луча 15 на длине волны 10,6 мкм поглощается поверхностными слоями воды толщиной несколько мкм [3]. Нагретое поверхностное пятно 16 становится источником акустических волн 17 (пунктирные линии), которые при наличии цели 8 отражаются от нее и принимаются гидроакустическими приемниками 7, 10.
Зная закон модуляции лазерного излучения, (а значит и акустических волн 17), полезный сигнал без труда выделяется на фоне морских шумов. А по временному признаку выделяется сигнал, отраженный от цели 8 от прямого акустического сигнала, распространяющегося от нагретого пятна 16.
Вся информация, поступающая по радиоканалу от гидрофона 10, с буя 9 и вертолета 2 на плавсредство 1, а также информация, принимаемая гидроакустическим приемником 7, обрабатывается на бортовом компьютере (на чертеже не показан), который выдает ориентировочные координаты цели 8.
После получения по радиоканалу этих координат, вертолет 3 достигает заданной области акватории 11. Оператор на вертолете 3 включает лазерную установку на неодиме или рубине (в зависимости от глубины расположения цели 8).
Лазерный луч 18 на этих длинах волн способен проникать в воде на глубины сотни метров [4] . Если лазерный луч 18 встречает на своем пути цель 8, он нагревает ее поверхность и гидроакустические приемники 7,10 зафиксируют на входе появление модулированных акустических волн на частоте модуляции излучения дополнительного лазера на вертолете 2. Если цель не зафиксирована, то осуществляется пространственное перемещение луча 18 до момента нахождения цели 8.
Законы модуляции лазерного излучения на различных длинах волн могут быть как одинаковыми, так и различными. При различных законах модуляции удобно определять глубину цели 8, при одинаковых - ее скорость. Бортовой компьютер на надводном плавсредстве 1 выдает уточненное место расположения цели 8.
После чего в место расположения цели 8 направляется лазерный луч 19 с полой сердцевиной, сформированный несколькими лазерными активными элементами 6.
Распределение энергии по сечению такого луча 19 показано на фиг. 3, сверху. Там же под позицией 4 показано расположение водной поверхности относительно гидроакустического приемника 7. Таким образом, лазерный луч 19 с полой сердцевиной проходит гидроакустический приемник 7 не задевая его.
Такой лазерный луч позволяет сформировать в водной среде искусственный звукопроводный канал, однако лишь для относительно высоких частот звуковых колебаний (порядка кГц), длина волны которых сравнима с поперечными размерами звукопроводного канала (порядка 1 м).
"Время жизни" искусственного звукопроводного канала в воде несколько секунд [3,4], поэтому для его непрерывного возобновления частоту повторения лазерных импульсов от лазерной установки 5 целесообразно иметь более 1 Гц.
Под действием лазерного луча с полой сердцевиной поверхность цели 8 также будет нагреваться, что вызовет распространение акустических волн от места нагрева, в частности их высокочастотной составляющей, по звукопроводному каналу 19. При угловом перемещении (сканировании) лазерного луча с полой сердцевиной перемещается и положение звукопроводного канала 19. В момент облучения лазерным лучом с полой сердцевиной ходовой части 20 подводной цели 8 на гидроакустический приемник 7 надводного плавсредства 1 будут поступать характерные гидроакустические сигналы, по параметрам которых бортовой компьютер плавсредства произведет идентификацию подводной цели 8.
Таким образом, предложенным способом дважды происходит уточнение пространственных координат цели по сравнению с прототипом и ее надежная идентификация по техническим характеристикам ходовой части. Что позволяет достичь поставленный технический результат.
Источники информации
1. Урик Р. Дж. Основы гидроакустики. - Л.: Судостроение, 1978, с. 26, 27.
2. Патент США N 5646907, кл. 367-93 (G 01 S 15/00), 1997 - прототип.
3. А.М.Трохан, В.А.Белогольский Ю.Н.Власов. Доклады АН СССР, 1971, 196, N5, с. 1069-1071.
4. Ю. Н. Власов и др. Теплофизика высоких температур, 1972, 10, N 5, 1135-1137.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2154841C1 |
| ТЕРМООПТИЧЕСКИЙ СПОСОБ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2192023C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЦИИ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2176401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НАД МОРСКОЙ АКВАТОРИЕЙ С ПОДВОДНОГО ПЛАВСРЕДСТВА | 2001 |
|
RU2210087C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ПЛАВСРЕДСТВА СО СТАЦИОНАРНЫМ РАЗМАГНИЧИВАЮЩИМ УСТРОЙСТВОМ В ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2168737C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2157551C1 |
| ОПТИКО-АКУСТИЧЕСКИЙ ГИДРОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ БЕСШУМНЫХ ПОДВОДНЫХ ЦЕЛЕЙ В РЕЖИМЕ ПАССИВНОЙ ГИДРОАКУСТИКИ | 1997 |
|
RU2115938C1 |
Изобретение относится к области гидроакустики и может быть использовано для обнаружения и идентификации слабошумящей подводной цели в охраняемой акватории. Существо способа заключается в том, что с летательного аппарата водную поверхность охраняемой акватории облучают модулированным лазерным лучом в диапазоне длин волн (9-11) мкм. Это излучение полностью поглощается поверхностными слоями воды. При этом место облучения становится источником модуляции акустических волн, детектируемых на надводном плавсредстве. При появлении цели в области распространения модулированных акустических волн, последние отражаются от нее. Это позволяет зафиксировать присутствие цели в охраняемой акватории. Для уточнения координат цели с летательного аппарата производят облучение места предполагаемого расположения цели с помощью модулированного лазерного луча в диапазоне длин волн (0,6-1,1) мкм. Излучение этих длин волн глубоко проникает в толщу воды. Затем производят перемещение (сканирование) этого лазерного луча до момента его попадания на поверхность цели. При этом происходит нагрев поверхности цели и место нагрева становится источником модулированных акустических волн, достигающих гидроакустического приемника плавсредства. Это позволяет точно определить пространственные координаты цели. Наконец, с надводного плавсредства на ходовую часть цели направляют лазерный луч с полой сердцевиной. При этом в воде формируется искусственный звукопроводный канал, по которому акустический сигнал с ходовой части цели достигает гидроакустического приемника, расположенного в сердцевине лазерного луча. По полученным сигналам бортовой компьютер надводного плавсредства определяет координаты и проводит идентификацию цели. Технический результат заключается в повышении точности определения пространственных координат цели и уменьшении вероятности ошибки при идентификации цели. 2 з.п.ф-лы, 3 ил.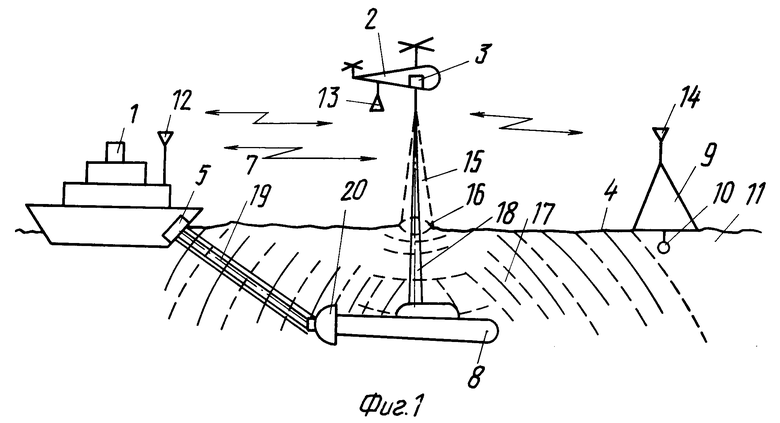
| US 5646907 A, 08.07.1997 | |||
| SU 1821773 A1, 15.06.1993 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2008692C1 |
| US 5161125 A, 03.11.1992 | |||
| WO 9411756 A1, 26.05.1994 | |||
| Урик Р.ДЖ | |||
| Основы гидроакустики | |||
| - Л.: Судостроение, 1978, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |

