I
Изобретение относится к области робототехники и может быть использовано при создании робототехнических систем различного назначения, в частности, подвижных промышле1тых роботов, обладающих свойствами искусственного интеллекта.
Известны устройства для управления движением адаптивного робота. Устройство 1 , содержащее блок сенсорных датчиков, электронно-вычислительную машину и блок исполнительных устройств, является сложным и производит обработку информации последовательно во времени, что не позволяет реализовать процесс управления движением адаптивного робота в реальном масштабе времени.
Наиболее близким техническим решением к данному изобретению является устройство, содержащее последовательно соединенные блок сенсорных датчиков, блок формирования модели внешней среды и вычислительный блок и блок исполнительных устройств, выход которого подключен к соответствую1цему входу вычислительного блока 2.
Недостатком этого устройства является то, что оно может быть использовано только в тех роботах, которые предназначены для перемещения в стационарной среде, в том числе естественной среде, например, паркового типа. В условиях динамичной среды, например, в условиях производственного цеха, где препятствия могут все время менять свое местоположение, использование такой системы управления затруднительно, так как приводит к необходимости постоянной коррекции топографической карты местности. Кроме того, в случае встречи робота с незапланированной ситуацией или выхода из строя одного из узлов логической сети вычислительного блока, работа этого устройства нарушается.
Пелью изобретения является повышение надежности и расширения функциональных возможностей устройства.
Сущность изобретения заключается в том, что устройство содержит 5 -стабильный триггер, входы которого соединены с соответствующими выходами вычислительного блока, а выходы с соответствугонхими входами блока исполиительных устройств, а также в том, что вычислительный блок содержит магрнц)- ключевых элементов, причем перзый и нторой входы каждого кл очевого элемента ij-fi ячейки соединены с соотвктствующнми входами вычислительного блока, третий вход - с ссютветствующим выходом (fJ-1) ключевого элемента, четвертый вход - с соогэетспг/юи/.им входом вычислительного блока, икотой вход с соответствующим выходом (i,-i-j) ключевого элемента, седьмой вход - с соответствуюидям выходом (i--l, j) ключевого элсментг.ь У вы-ход - с соответствуюци{ми входами {i,j--l} ключевого элемента,, -ходами (i,j-l) (i,j-i-i), . j) Ь-J) ключевых эггаментов, и киждын ключевой элемент вычислительного блока содержит последовательно соединенные элемент ИЛИ и элемент И, второй вход которого подключен ко второму входу яЧйикк, третий, вход - к ьчтому входу ячейки, а выход к выходу ключевого элемента, первь Й, второй третий, четвертый и пять входгз эдемента ИЛИ соединены с третьим, седьмым, четвертым шестым и первьгм входами ключевого элемента соответственно.
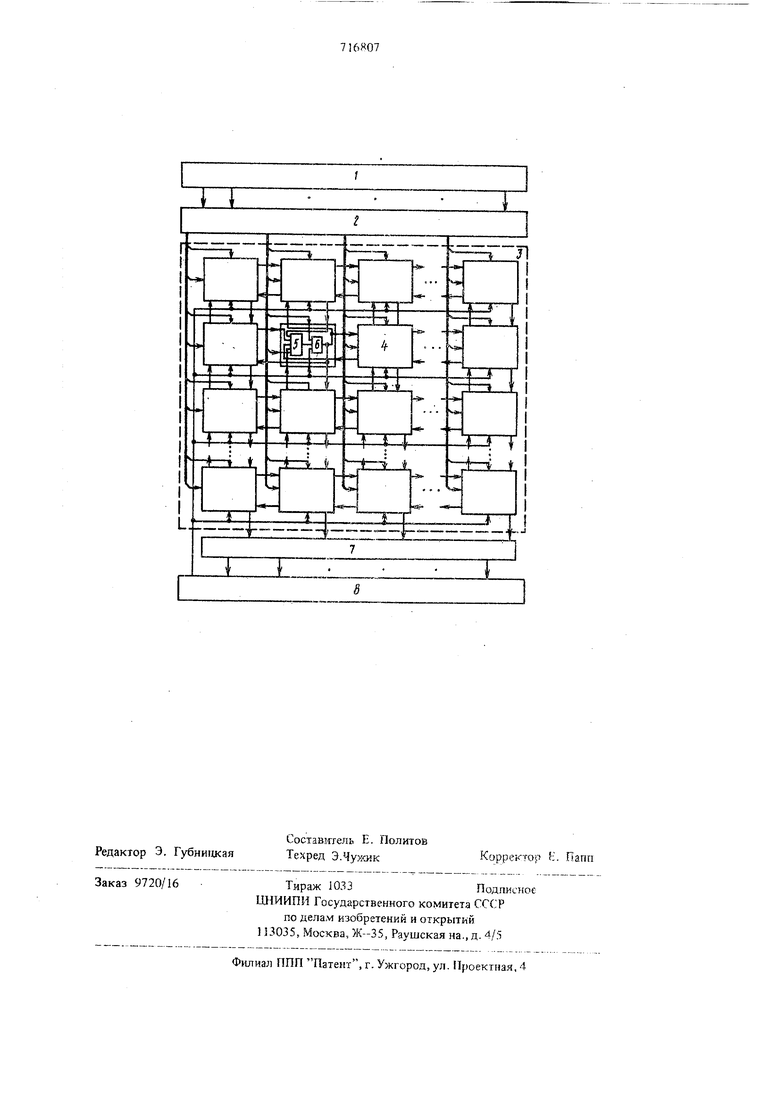
На чертеже представлена функ1щонапы о,я система устройства для уиравления движением адантивного робота.
Устройство содержит: 1 -- блок сенсорных датчиков, 2 - блок формирования модели
внеишей среды, 3 - вычисл ггельный блок. 4 логические элементы вычислительного блока; 5 элементы ИЛИ; 6 - элементы И, 7 - йстабильный триггер; 8 - блок исполнительных устройств.
Работает устройство унравления следующим образом. Перед началом выполнения каждого элементарного акта движения робота на вь;ход.е эффекторной системы 8 гюявляется запрещаю11щй сигнал, который поступает на третьн зхсды элементов И 6 и блокирует их. При этом на всех вь ходах всех ячеек 4 вычислительного блока 3 появляются нулевые сигналы и триггер 7 переходит в такое состояние, при кстором на его выходах сигналы отсутствуют, то есть робот движется по инерции. В это же BpehfH на выхо.дах блока ч твствите.пьных сенсорных датчиков 1 присутствуют сигналы, карактеризующие вне)лнюю по отношению к роботу среду, например, сведения о рельефе той местности, на которой он находится. Поступая на входы системы 2 формирования модели внешней среды, эти сигналы преобразуются в сигналы двух типов О или 1. Причем блг;к сенсорных датчиков 1 и блок 2 формирования моде;ги внеи1ней среды построены так, что участку поверхности то-й мебтности, т которой перемещается робот соответствует толко одна пара выходов блока 2 и следоватепьI.-J ключевой элемент 4. Ьсли участок коворхиости, соогветствуюшнй ij ключевому :)лсме;{ту сети., не предстпвляет собой препятствия для робота, то на первом выходе ij пары выходов блока 2, соединенпом с первым входом IJ ; лгоче,вого элемента 4 появляется О, а на втором выходе, сосяиийнном со вторым входом, гюявляется сигнал 1. Ксли рассматриваемый участок поверхности содержит препятствие щш робота, то на обоих выходах ij парь гюявляется 0. Если же в рассматриваемом Уасткс находтся цель. 1 нагфавлении которок робот должен перемсгиаться, то на обоих ,ыхо,дах IJ пары пояпляется 1. Иными словами, участкам среды, содерхсащим препятствия соответствуют блокирова1)иые, ненроводя дке ключевые элементы 4, участкак без препятстви соответствуют проводящие к;почевые элементы 4, а участкам содержащим цель соответствугот 1проводящнс ключевые элементлЫ 4, генерирующие сди1 ИП1Ь е сигна;,(ы, которые проходят через проводящие к.иочсныс элементы 4 и ае проходят через заблокированные, непроводящие к.почевые эле.менты 4. Таки.-. образом, на ключевых эле.ме1ггах 4 адекватно отображаются ээлзятыг и свободные для двиясения участки внепнсй среды. На этой же сети отображается Б ЛИДС генератора импульсов и тот участок, в направлении которого нужно перемещаться. После окопчалия запрещан цего сигнала, формируемого блоком псполпительпых устройств 8, то есть ключевые элементы, которые соответствуют учас1ку среды, содержащему деяь, начжают генерировать импульсы, распростралшощкеся во все .стороны через проводящие ключевые элемеить 4, обходя ключевые элементы 4 непроводящие. Распространяясь во все стороны, едш{ Г-1ные сигналы появляются на выходах проводящих клю1евь х элементов 4k ряда вычисл15тсльного блока 3. Очеввдно, что первым на выходе одного из ключевых эле лепл-ов 4k ряда появится тот сигнал, который прошел по крлпшйшему пути от генерирующего ключевого элемента 4 до данного ключевого элемента 41 ряда. Есяк теперь учесть тот факт, Ч1-0 положение робота в среде моделируеюя входами Р-стабильного Tpisrrepa 7, фикскрушшего этот сигнал, то можно утверждать, что путь первого сигнала является аоспроизводимой на логической сети вычислительного блока 3 мод-глыо кратчайихего пути от робота к дели. Фиксация первого сигнала соответствует акту принятия решения, заключающегося в выборе того направления, в котором нужно совершить перемещение, с тем, чтобы минуя существующие в данный момеггг препятствия, но кратчайшему -пути достичь цел Цействительно, первый сигнал приходит с той стороны вычислительного б.чока, в которой расположены проводящие ячейки 4, что соответствует той стороне реальной среды, которая не содержит препятствий для робота. Этот сигнал переводит Е-стабильный триггер 7 с такое состояние, при котором на его выходе, соответствующем входу первого сигнала, появляется единица, а на остальных выходах появл ются нули. Следующие сигналы, поступающие на Б -стабильный триггер 7 не изменяют его состояние. Состояние триггера 7 сохраняется до тех пор, пока зффекторная система 8 не отработает элементарный шаг движения. После окончания элементарного шага движения, на выходе блока исполнительных устройств формируется запрещающий сигнал, поступающий на пятый вход всех ячеек 4 и тем самым бло кирующий вычислительный блок. При этом -стабильный триггер .7 приходит в исходное состояние и все описанные операции повторяются до тех пор, пока робот не достигнет цел В момент достижения цели робот останавливается. Останавливается он и тогда, когда перед ним возникают непроходимые препятствия. Применение изобретения позволит сохранять работоспособность робота в условиях изменяющейся окружающей среды и повысить надежность его работы. Формула изобретения 1. Устройство для управления движением адаптивного робота, содержащее последовательно соединенные блок сенсорных датчиков, бло формирования модели внешней среды и вьшис лительный блок и блок исполнительных устройств, выход которого подключен к соответствующему входу вычислительного блока, отличающееся тем, что, с целью повыщения надежности и распиирения функцио Нальных возможностей устройства, оно содержит 8 -стабильный триггер, входы которого соед1шены с соответствующими выходами вычислительного блока, а выходы - с соответствующими входами блока исполнительных устройств. 2. Устройство по п. 1, отличающееся тем, что вычислительный блок содержит матрицу ключевых элементов, причем первый и второй входы каждого ij ключевого элемента соединены с соответствующими входами вычислительного блока, третий вход - с соответствующим выходом (i, j-1) ключевого элемента четвертый вход - с соответствующим выходом (i+l, j) ключевого элемента, пятый вход - с соответствующим входом вычислительного блока, щестой вход - с соответствующим выходом (i J1+1) ключевого элемента, седьмой вход - с соответствующим выходом (i-1, J) ключевого элемента, а выход - с соответствующими входами (i, j-1), (i,j+l) (i-1,j) и (i+l,j) ключевых элементов. 3. Устройство по п. 2, о т л и ч а ю щ ее с я тем, что ключевой элемент вычислительного блока содержит последовательно соединенные элемент ИЛИ и элемент И, второй вход которого подключен ко второму входу ключевого элемента, третий вход - к пятому входу ключевого элемента, а выход - к выходу ключевого элемента, первый, второй, третий, четвертый и пятый входы .-(ясмента ИЛИ соединены с третьим, седьмым, четвертым, шестым и первым входами ключевого элемента соответственно. Исгочннки информации, принятые во Е1;нмание при экспертизе 1. Интегральные рсгботы под. ред. Г.ЕЛоздняка, М., Мир, с. 21-40. 2. Труды 1У Мехсцународной конференЩ1И по искусственном} iffiгглчекту том 9, М. 1975.статьи Н. М. Амосова и др. Транспортный робот с сетевой системой управления (прототип) ;
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением адаптивного транспортного робота | 1983 |
|
SU1138786A1 |
| Устройство для управления адаптив-НыМ РОбОТОМ-МАНипуляТОРОМ | 1979 |
|
SU812561A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU849142A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2531864C1 |
| Устройство для управления адаптивным роботом | 1985 |
|
SU1252755A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2450308C2 |
| Устройство для управления адаптивным роботом | 1976 |
|
SU704774A1 |
| УСТРОЙСТВО ПОЗИЦИОННО-ТРАЕКТОРНОГО УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ | 2001 |
|
RU2185279C1 |