Изобретение относится к производству длинномерных изделий методом волочения.
Известны аналоги самоустанавливающегося волокодержателя, выполненного таким образом, что обойма с волокой имеет две степени свободы по отношению к жестко закрепленному корпусу волокодержателя, волока смещена по отношению к плоскости опоры обоймы по направлению волочения и закреплена в обойме так, что может перемещаться в плоскости, перпендикулярной продольной оси обоймы.
В качестве прототипа выбрано устройство для автоматического управления волочением с использованием виброэнергии (патент на изобретение 2.169.906 от 10 апреля 1974 года, Франция), включающее в себя устройство измерения действительной скорости волочения; средства преобразования выходного сигнала устройства для получения предварительно заданной величины; средства уравнивания полученного выходного сигнала, определяемого действительным значением виброскорости, и выходного сигнала преобразователя; устройство полосовой фильтрации выходного сигнала средств выравнивания; схему для приложения выходного сигнала высокочастотного генератора мощности и сигнала с выхода полосового фильтра на вход электроакустического преобразователя.
Целью предлагаемого технического решения является повышение качества изделий, изготавливаемых способом волочения, путем уменьшения их кривизны.
На фиг. 1 изображена схема предлагаемого автоматического устройства волочения длинномерных изделий.
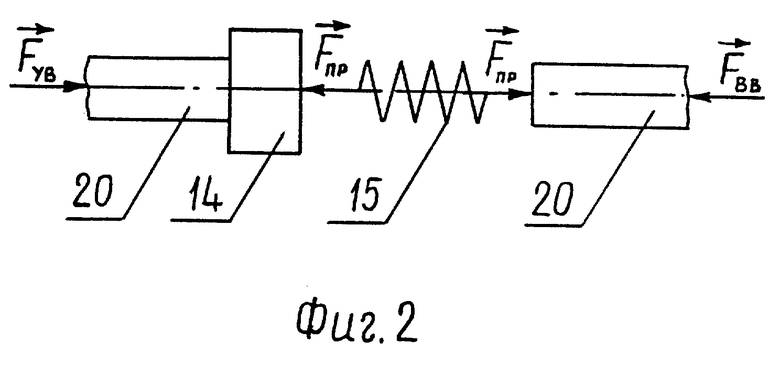
На фиг. 2 изображена схема закрепления датчика силы с пружиной на штоке исполнительного привода.
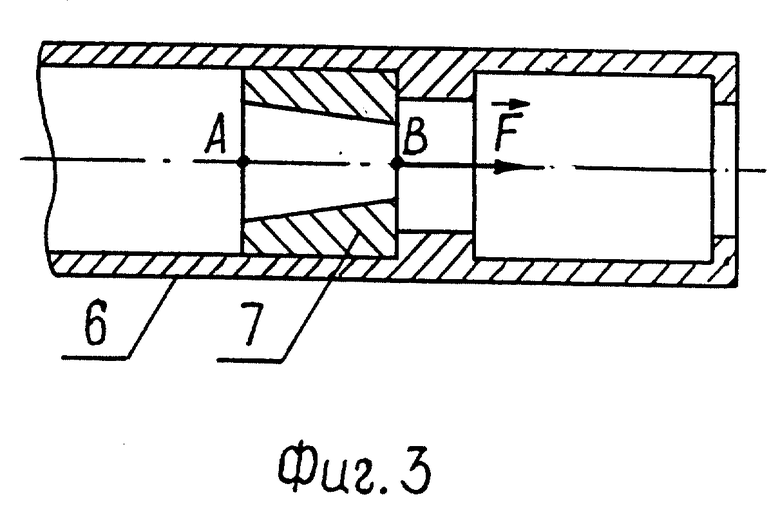
На фиг. 3 изображена схема закрепления волоки во внутреннем стакане.
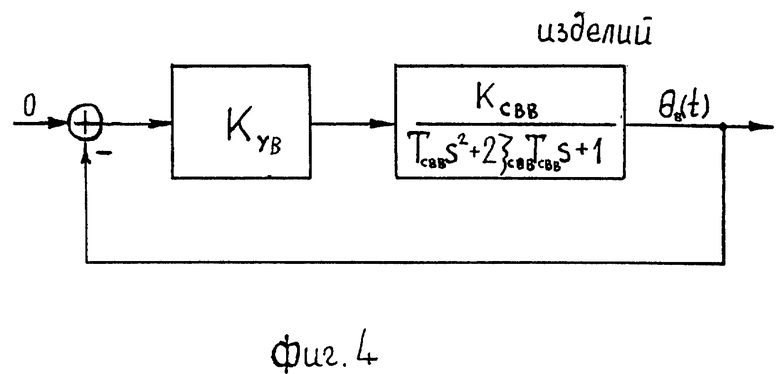
На фиг. 4 изображена структурная схема системы автоматического управления (САУ) движением самоустанавливающегося волокодержателя с качающейся волокой (СВКВ) в вертикальном канале.
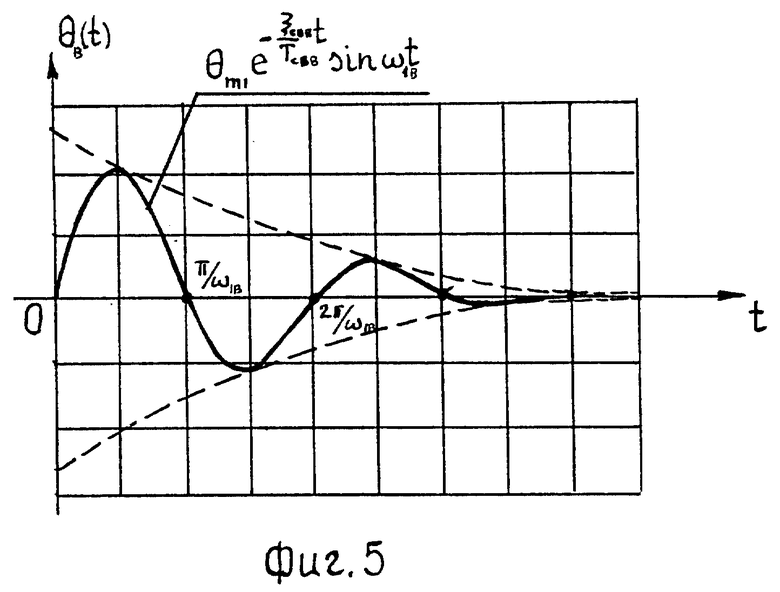
На фиг. 5 изображен график изменения угла θв(t) при наличии демпфирования колебаний СВКВ.
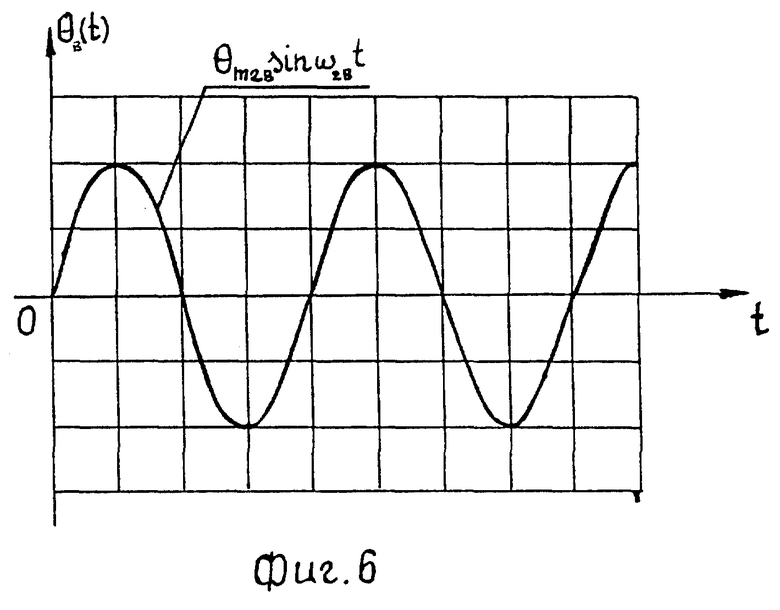
На фиг. 6 изображен график изменения угла θв(t) при отсутствии демпфирования колебаний СВКВ.
Указанная цель достигается тем, что самоустанавливающийся технологический инструмент для волочения изделий содержит станину, внешнюю раму, установленную в станине на вертикальных осях с возможностью качания, внешний стакан, установленный во внешней раме на горизонтальных осях с возможностью качания, внутреннюю раму, установленную во внешнем стакане на вертикальных осях с возможностью качания, внутренний стакан, несущий волоку и установленный во внутренней раме на горизонтальных осях с возможностью качания, демпфер, шарнирно соединенный со станиной и внешней рамой, демпфер, шарнирно соединенный с внешней рамой и внешним стаканом, демпфер, шарнирно соединенный с внешним стаканом и внутренней рамой, демпфер, шарнирно соединенный с внутренней рамой и внутренним стаканом, и вертикальный и горизонтальный каналы управления, имеющие каждый последовательно соединенные исполнительный привод, датчик силы и пружину, усилитель мощности, блок дифференцирования и сумматор, при этом в каждом канале управления второй вход сумматора соединен с выходом усилителя мощности, выходные штоки исполнительных приводов вертикального и горизонтального каналов управления механически соединены с соответствующими датчиками силы, исполнительный привод горизонтального канала управления установлен с помощью шарнира на внешнем стакане, а его выходной шток через датчик силы и пружину соединен с помощью шарнира с внутренней рамой, исполнительный привод вертикального канала управления установлен с помощью шарнира на внутреннем стакане, а его выходной шток через датчик силы и пружину соединен с внутренней рамой.
Введенные в устройство четыре демпфера:
- демпфер 8, шарнирно соединенный со станиной 1 и внешней рамой 2 таким образом, что демпфирующий момент, развиваемый этим демпфером, приложен к внешней раме 2 относительно вертикальной оси 24;
- демпфер 9, шарнирно соединенный с внешней рамой 2 и внешним стаканом 4 таким образом, что демпфирующий момент, развиваемый этим демпфером, приложен к внешнему стакану относительно горизонтальной оси 23;
- демпфер 11, шарнирно соединенный с внешним стаканом 4 и внутренней рамой 5 таким образом, что демпфирующий момент, развиваемый этим демпфером, приложен к внутренней раме 5 относительно вертикальной оси 22;
- демпфер 10, шарнирно соединенный с внутренней рамой 5 и внутренним стаканом 6 таким образом, что момент, развиваемый этим демпфером, приложен к внутреннему стакану относительно горизонтальной оси 21, позволяют демпфировать колебания внешнего и внутреннего стаканов волокодержателя, возникающие в процессе волочения. В результате уменьшается влияние задемпфированных колебаний на процесс волочения, что приводит к уменьшению кривизны изделий и, следовательно, к повышению их качества.
Устройство включает в себя СВКВ, который состоит из станины 1, внешней рамы 2, закрепленной в станине 1 с помощью опор качения 3, внутренней рамы 5, закрепленной внутри внешнего стакана 4 с помощью опор качения 3, волоки 7, жестко закрепленной во внутреннем стакане 6, демпфера 8, соединенного одностепенными шарнирами 12 со станиной 1 и внешней рамой 2, демпфера 9, соединенного шарнирами 12 с внешней рамой 2 и внешним стаканом 4, демпфера 10, соединенного шарнирами 12 с внутренней рамой 5 и внутренним стаканом 6, демпфера 11, соединенного шарнирами 12 с внешним стаканом 4 и внутренней рамой 5.
С внутренним стаканом 6 СВКВ соединен вертикальный канал управления (ВКУ), содержащий последовательно соединенные исполнительный привод 13 (ИП), датчик силы 14 и пружину 15, а также усилитель мощности 16 (УМ), блок дифференцирования 17 (БД), фильтр низких частот 18 (ФНЧ), сумматор 19.
Исполнительный привод 13 закреплен на внутреннем стакане 6 с помощью одностепенного шарнира 12, а его шток 20 через датчик силы 14 и пружину 15 соединен с внутренней рамой 5 с помощью шарнира 12.
Горизонтальный канал управления (ГКУ) содержит такие же элементы, что и ВКУ. Отличие состоит в том, что исполнительный привод 13 закреплен с помощью шарнира 12 на внешнем стакане 4 в плоскости, перпендикулярной плоскости действия ВКУ.
Внутренний стакан 6 вращается во внутренней раме 5 вокруг оси 21, а внутренняя рама 5 вращается во внешнем стакане 4 вокруг оси 22. Внешний стакан 4 вращается во внешней раме 2 вокруг оси 23, а внешняя рама 2 вращается в станине 1 вокруг оси 24. Ось 21 перпендикулярна оси 22 и ось 23 перпендикулярна оси 24.
Как показано на фиг. 2, датчик силы 14 ВКУ (ГКУ) механически соединен со штоком 20 исполнительного привода 13. Пружина 15 механически соединена с датчиком силы и штоком 20. Ось чувствительности датчика силы и продольная ось штока 20 совпадают.  сила, приложенная к внутреннему стакану со стороны исполнительного привода ВКУ;
сила, приложенная к внутреннему стакану со стороны исполнительного привода ВКУ;  составляющая поперечной (вертикальной) возмущающей силы, приложенная к штоку 20 исполнительного привода со стороны внутреннего стакана. Для ГКУ аналогичные силы имеют обозначения:
составляющая поперечной (вертикальной) возмущающей силы, приложенная к штоку 20 исполнительного привода со стороны внутреннего стакана. Для ГКУ аналогичные силы имеют обозначения: 
Основной причиной возникновения кривизны изделий (см. фиг. 3) является несовпадение оси волоки 7 АВ с направлением силы волочения  . Пластический шарнир В, через который сила волочения прикладывается к волоке, расположен на оси волоки 7 АВ.
. Пластический шарнир В, через который сила волочения прикладывается к волоке, расположен на оси волоки 7 АВ.
Предлагаемое автоматическое устройство устраняет эту причину, т.е. обеспечивает с требуемой точностью совпадение оси волоки с направлением силы волочения  Предлагаемое устройство функционирует следующим образом. Пусть ось волоки АВ не совпадает с направлением силы волочения
Предлагаемое устройство функционирует следующим образом. Пусть ось волоки АВ не совпадает с направлением силы волочения  Тогда в результате несимметричного течения материала изделия через канал волоки возникает возмущающее воздействие
Тогда в результате несимметричного течения материала изделия через канал волоки возникает возмущающее воздействие  под действием которого оба стакана волокодержателя совершают пространственное движение.
под действием которого оба стакана волокодержателя совершают пространственное движение.
Составляющая (вертикальная) поперечной возмущающей силы  приложенная к штоку 20 исполнительного привода 13, измеряется датчиком силы 14 вертикального канала управления. Сигнал с датчика силы через усилитель мощности 16, блок дифференцирования 17 и фильтр низких частот 18 поступает на один из входов сумматора 19. На второй вход сумматора сигнал поступает с усилителя мощности 16. Сигнал с сумматора 19 поступает на исполнительный привод 13 вертикального канала управления, который управляет движением волоки в вертикальной плоскости с помощью управляющей силы
приложенная к штоку 20 исполнительного привода 13, измеряется датчиком силы 14 вертикального канала управления. Сигнал с датчика силы через усилитель мощности 16, блок дифференцирования 17 и фильтр низких частот 18 поступает на один из входов сумматора 19. На второй вход сумматора сигнал поступает с усилителя мощности 16. Сигнал с сумматора 19 поступает на исполнительный привод 13 вертикального канала управления, который управляет движением волоки в вертикальной плоскости с помощью управляющей силы  (см. фиг. 2), приложенной к внутреннему стакану волокодержателя. Управляющая сила
(см. фиг. 2), приложенной к внутреннему стакану волокодержателя. Управляющая сила  вырабатывается так, что под ее воздействием внутренний и внешний стаканы занимают устойчивые положения в вертикальной плоскости PB, образованной осью 22 и осью внутреннего стакана 6, а проекции силы
вырабатывается так, что под ее воздействием внутренний и внешний стаканы занимают устойчивые положения в вертикальной плоскости PB, образованной осью 22 и осью внутреннего стакана 6, а проекции силы  и оси волоки AB на вертикальную плоскость PB совпадают по направлению.
и оси волоки AB на вертикальную плоскость PB совпадают по направлению.
В горизонтальном канале управления (ГКУ) сила  вырабатывается аналогично на основании сигнала с датчика силы о составляющей (горизонтальной) возмущающей силы
вырабатывается аналогично на основании сигнала с датчика силы о составляющей (горизонтальной) возмущающей силы  Под действием управляющей силы
Под действием управляющей силы  подвижные элементы волокодержателя также занимают устойчивые положения в горизонтальной плоскости Pг, образованный осью 21 и осью внутреннего стакана 6, а проекция силы волочения
подвижные элементы волокодержателя также занимают устойчивые положения в горизонтальной плоскости Pг, образованный осью 21 и осью внутреннего стакана 6, а проекция силы волочения  и оси волоки AB на горизонтальную плоскость Pг совпадают по направлению.
и оси волоки AB на горизонтальную плоскость Pг совпадают по направлению.
Совместное функционирование вертикального и горизонтального каналов управления автоматического устройства обеспечивает устойчивое движение волоки в условиях внешних возмущений и требуемую точность совпадения ее оси с направлением силы волочения в течение изготовления каждого изделия.
Проведем качественный анализ влияния введенных в устройство демпферов на кривизну изготавливаемых изделий. С этой целью рассмотрим динамику возмущенного движения СВКВ в вертикальном канале управления (ВКУ). При наличии широкополосного исполнительного привода (ИП) можно пренебречь его инерционностью по сравнению с инерционными характеристиками СВКВ и описать динамику подсистемы "ИП-ВКУ" передаточной функцией вида WyB(S)=KyB. Динамику возмущенного движения СВКВ в вертикальном канале управления можно описать с достаточной степенью точности передаточной функцией вида:
где θв(s) - преобразование Лапласа от угла рассогласования θв(t) между проекциями оси волоки АВ и силы волочения  на вертикальную плоскость PB; FyB(s) - преобразование Лапласа от управляющей силы FyB(t), развиваемой исполнительным приводом вертикального канала управления; KCBB - коэффициент передачи СВКВ; TCBB - постоянная времени СВКВ; ξсвв - коэффициент демпфирования СВКВ, который определяется характеристиками двух демпферов вертикального канала управления.
на вертикальную плоскость PB; FyB(s) - преобразование Лапласа от управляющей силы FyB(t), развиваемой исполнительным приводом вертикального канала управления; KCBB - коэффициент передачи СВКВ; TCBB - постоянная времени СВКВ; ξсвв - коэффициент демпфирования СВКВ, который определяется характеристиками двух демпферов вертикального канала управления.
Упрощенная структурная схема замкнутой системы управления движением СВКВ в вертикальном канале представлена на фиг. 4. Дифференциальное уравнение, описывающее изменение угла θв(t) во времени, имеет вид
КB 2= 1+KCBBKyB, KyB - коэффициент усиления УМ при начальных условиях: 
Решение уравнения имеет вид:
График изменения θв(t) во времени изображен на фиг. 5. Из графика видно, что соответствующим выбором коэффициента демпфирования ξсвв = (конструктивных параметров демпферов) можно добиться существенного подавления колебаний угла около номинального нулевого значения, то есть уменьшить кривизну изготавливаемого изделия.
Отсутствие демпферов в устройстве приводит к развитию колебательного движения СВКВ, которое описывается дифференциальным уравнением вида:
при начальных условиях: 
Решение уравнения имеет вид:
θв(t) = θm2вsinω2вt, где 
и амплитуда θm2в определяется с помощью начальных условий.
График изменений θв(t) во времени изображен на фиг. 6.
Проведенный качественный анализ работы устройства позволяет сделать вывод: предлагаемое устройство по сравнению с прототипом создает качественно более благоприятные условия для протекания управляемого процесса волочения и при надлежащем выборе параметров позволяет улучшить качество изготавливаемых изделий путем уменьшения их кривизны.
Изобретение относится к производству изделий методом волочения. Устройство включает в себя самоустанавливающийся волокодержатель с качающейся волокой (СВКВ). СВКВ состоит из неподвижной опоры внешней рамы, внешнего стакана, внутренней рамы непосредственно внутреннего стакана, волоки и демпферов. При этом внешняя рама закреплена в станине с помощью опор качения. Внешний стакан закреплен во внешней раме с помощью опор качения. Внутренняя рама закреплена внутри внешнего стакана с помощью опор качения. Внутренний стакан закреплен во внутренней раме с помощью опор качения. Волока жестко закреплена во внутреннем стакане. С внутренним стаканом СВКВ соединен вертикальный канал управления (ВКУ). ВКУ содержит последовательно соединенные исполнительный привод, датчик силы и пружину, а также усилитель мощности, блок дифференцирования, фильтр низких частот, сумматор. Исполнительный привод вертикального канала управления закреплен на внутреннем стакане с помощью одностепенного шарнира. Горизонтальный канал управления (ГКУ) содержит такие же элементы, что и ВКУ. При этом исполнительный привод закреплен с помощью шарнира на внешнем стакане. Изобретение позволяет повысить качество изделий путем уменьшения их кривизны. 6 ил.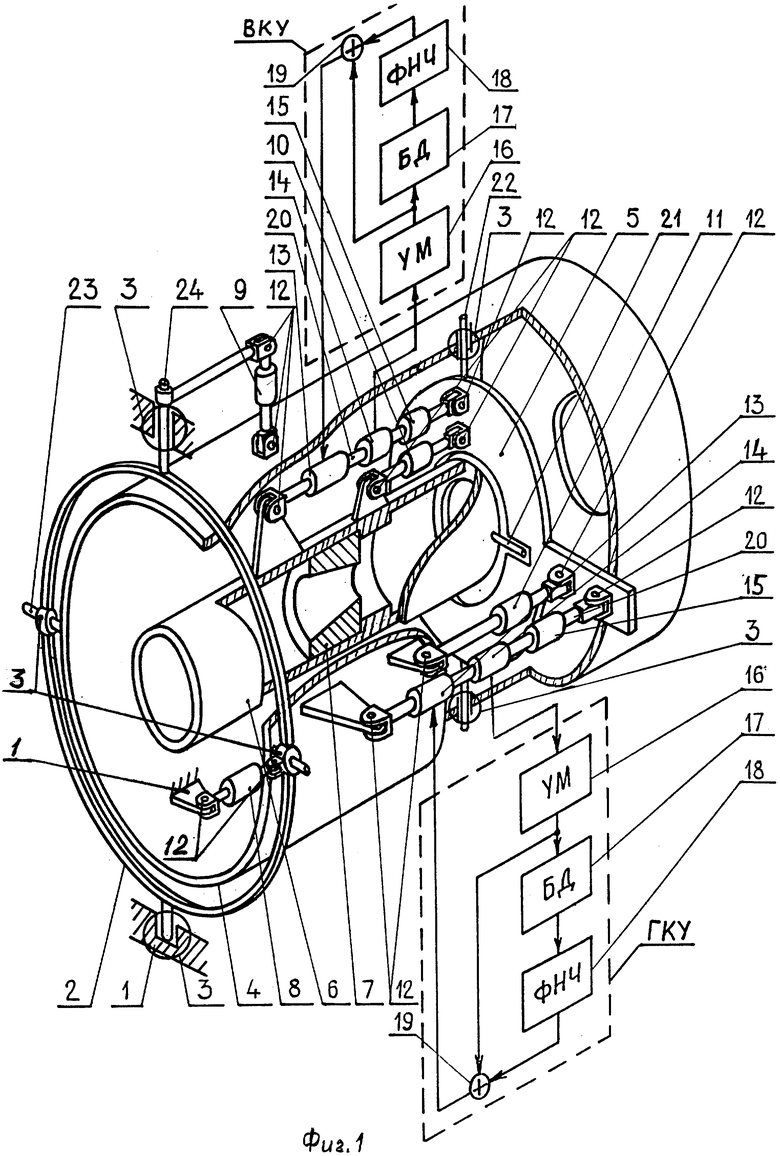
Самоустанавливающийся технологический инструмент для волочения изделий, включающий волоку и каналы управления, отличающийся тем, что он содержит станину, внешнюю раму, установленную в станине на вертикальных осях с возможностью качания, внешний стакан, установленный во внешней раме на горизонтальных осях с возможностью качания, внутреннюю раму, установленную во внешнем стакане на вертикальных осях с возможностью качания, внутренний стакан, несущий волоку и установленный во внутренней раме на горизонтальных осях с возможностью качания, демпфер, шарнирно соединенный со станиной и внешней рамой, демпфер, шарнирно соединенный с внешней рамой и внешним стаканом, демпфер, шарнирно соединенный с внешним стаканом и внутренней рамой, демпфер, шарнирно соединенный с внутренней рамой и внутренним стаканом, и вертикальный и горизонтальный каналы управления, имеющие каждый последовательно соединенные исполнительный привод, датчик силы и пружину, усилитель мощности, блок дифференцирования и сумматор, при этом в каждом канале управления второй вход сумматора соединен с выходом усилителя мощности, выходные штоки исполнительных приводов вертикального и горизонтального каналов управления механически соединены с соответствующими датчиками силы, исполнительный привод горизонтального канала управления установлен с помощью шарнира на внешнем стакане, а его выходной шток соединен с помощью шарнира с внутренней рамой, исполнительный привод вертикального канала управления установлен с помощью шарнира на внутреннем стакане, а его выходной шток соединен с помощью шарнира с внутренней рамой.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ВЕЩЕСТВ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2169906C2 |
| Волокодержатель для волочения труб и прутков | 1981 |
|
SU995958A2 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ВОЛОЧИЛЬНОГО ИНСТРУМЕНТА | 1992 |
|
RU2040353C1 |
| Устройство для волочения проволоки с применением ультразвуковых колебаний | 1978 |
|
SU774654A1 |
| Лапароскопический тренажер | 2019 |
|
RU2713986C1 |
| US 3744293 A, 10.07.1973. | |||

