Способ управления динамическим объектом и устройство для его осуществления могут быть использованы для управления угловым движением динамических объектов, например космических кораблей "Союз ТМ", "Прогресс М" и орбитальной станции "Мир".
Известен способ формирования управляющих воздействий (аналог), описанный в многочисленных публикациях, например Лебедев А.А., Соколов В. Б. "Встреча на орбите", Машиностроение, Москва 1969 г., когда для определения моментов приложения управления и его длительности формируется управляющая функция q
q = S+ Кд•W,
где S - угловое рассогласование, W - угловая скорость рассогласования, Кд - коэффициент демпфирования.
В нелинейных автоматах стабилизации функция q подается на релейный элемент с зоной нечувствительности. При превышении q заданной зоны нечувствительности релейный элемент срабатывает, и включаются исполнительные органы (ИО). Длительность их включения зависит от величины q и изменяется от периодически повторяемых импульсов, заранее определенных длительности и периода, до непрерывного включения.
Недостатками этого способа являются:
- зависимость свойств от качества сигнала скорости W и постоянной времени ее определения,
- длительный переходной процесс при устранении начального рассогласования,
- зависимость качества переходного процесса (амплитуда начального выброса скорости и длительность переходного процесса до установившихся колебаний при наличии внешнего возмущающего воздействия).
Известно устройство формирования управляющих воздействий, используемое при ручном управлении космическими аппаратами. Устройство описано в книге Лебедев А. А. , Соколов В. Б. "Встреча на орбите", Машиностроение, Москва 1969 г.
Блок-схема устройства приведена на фиг. 1.
Устройство состоит из блока выдачи угловой скорости 1, зоны нечувствительности 2, блока формирования импульсов 3 и исполнительных органов (ИО) 4.
В процессе управления при превышении сигналом угловой скорости заданной зоны нечувствительности блок задания управляющих импульсов в зависимости от величины сигнала угловой скорости выдает команды на включение ИО. Выключение ИО производится, когда угловая скорость станет меньше зоны нечувствительности.
Данное устройство ограничивает только величину угловой скорости, а потому не обеспечивает стабилизацию объекта управления относительно заданной системы координат.
Известен способ управления, выбранный в качестве прототипа, (способ и система, реализующая его, описаны в патенте N 1695263 авторов Бичуцкого А.Я. , Леденева Г.Я., Нездюра Л.А., Фрунца А.С.).
В этом способе управления для повышения качества переходного процесса отменено управление по суммарному сигналу q, который используется в аналоге. Раздельно сравнивается величина угла с заданной зоной нечувствительности, а внутри зоны нечувствительности по углу введена зона нечувствительности по угловой скорости. При превышении величиной угла заданной зоны нечувствительности d1 (заданной точности поддержания ориентации) в устройстве происходит изменение структуры, в результате чего на выходе релейного элемента появляется сигнал f
f=S+k•W.
Выключение ИО произойдет, когда угловая скорость объекта управления W станет больше (по модулю) требуемой скорости для данного углового рассогласования S. Знак управляющего воздействия выбирается по знаку суммарного сигнала f.
В зависимости от величины сигнала (по углу или угловой скорости) длительность управляющего воздействия изменяется от минимального периодически повторяемого до постоянно действующего. (Под минимальным управляющим воздействием подразумевается воздействие, обеспечивающее минимально возможное изменение скорости за однократное приложение воздействия.)
Изменение на выходе релейного элемента сигнала f после его срабатывания объясняется тем, что интегратор, используемый в устройстве, оказывается включенным в обратную связь релейного усилителя. Если принять, что коэффициент усиления релейного усилителя Ку, то передаточная функция D(p) устройства становится
Моделирование показывает, что постоянная времени Т
T=1/Kу
не может быть большой и для многих задач по управлению космическими объектами ее значение должно быть не более 0.02 - 0.04 секунды. Чтобы реализовать такие постоянные времени такт работы дискретного автомата должен быть не более 0.01 - 0.02 секунды, что возможно лишь в ограниченных случаях.
Другим недостатком рассматриваемого способа управления является факт, что выключение ИО все же происходит по суммарному сигналу, в том числе и по скорости, а потому и этому способу, как и аналогу, присущ недостаток, связанный с тем, что прекращение выдачи управляющих воздействий происходит только после достижения скоростью значения, заданного коэффициентами управления. Вследствие этого требуется точное знание скорости, а задержки или постоянные времени при вычислении ее сказываются на качестве регулирования.
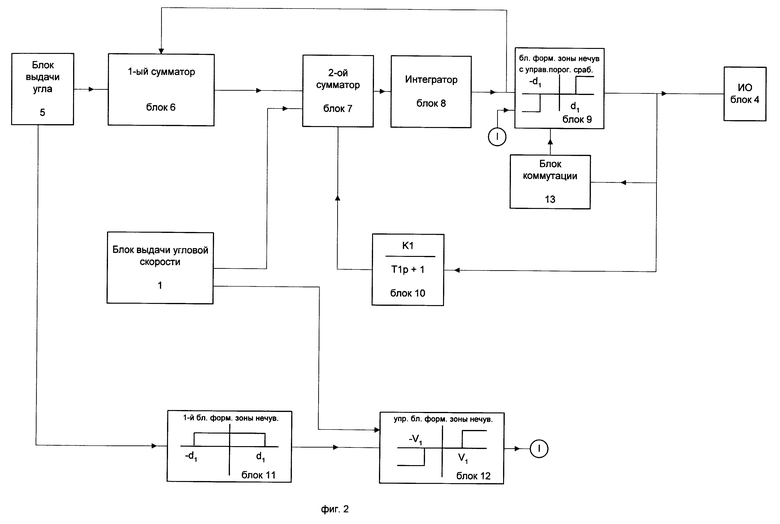
Блок-схема устройства, реализующего описанный способ управления, приведена на фиг. 2.
Устройство состоит из блока выдачи угловой скорости 1, исполнительных органов 4, блока выдачи угла 5, двух сумматоров 6 и 7, интегратора 8, блока формирования зоны нечувствительности с управляемым порогом срабатывания 9, апериодического звена 10, 1-го блока формирования зоны нечувствительности 11, управляемого блока формирования зоны нечувствительности 12, блока коммутации 13.
Данное устройство обеспечивает стабилизацию относительно заданной системы координат по углу и угловой скорости с заданными точностями. Отклонение от номинального положения определяется значениями порогов срабатывания блоков формирования зоны нечувствительности. С учетом связей, приведенных на фиг. 2, до тех пор, пока сигнал на входе блока 9 меньше ее порогового значения d1, сигнал на выходе интегратора 8 - fi1 равен сигналу на выходе датчика угла 5 - fi. Два сумматора 6 и 7 и интегратор 8 с учетом связи с выхода датчика угловой скорости на вход сумматора 7 обеспечивают фильтрацию сигналов угла и угловой скорости. После срабатывания блока 9 (при превышении f1 значения d1) выход ее через апериодическое звено 10 подключается к сумматору 7.
Введение такой связи, если представить зону нечувствительности усилителем с коэффициентом усиления Ку, обеспечивает включение интегратора в обратную связь, и вследствие этого на выходе блока 9 сигнал будет состоять из суммы угла и его производной.
Выход блока выдачи угла 5 подключен и к блоку 11. Пока сигнал угла fi1 меньше порога срабатывания d1 блока 11, блоку 12 разрешается сравнивать значение угловой скорости с заданным порогом по скорости. Выход блока 12 соединен с блоком 9. Вход блока коммутации 13 соединен с выходом блока 9, а выход - с входом блока 9.
Вследствие того, что после превышения углом fi1 порогового значения блока 9 сигнал на выходе интегратора содержит информацию об угле и угловой скорости, то включения ИО будут продолжаться до тех пор, пока угловая скорость не сменит знак, а ее значение не станет соответствующим величине угла.
Таким образом включение ИО производится при превышении углом заданного порогового значения d1 (заданная точность по углу), а вследствие изменения структуры устройства после срабатывания порогового устройства блока 9 выключение производится по текущему значению угла и угловой скорости.
При значении угла меньше d1 производится сравнение значения текущей скорости с пороговым значением V1 блока 12. Если скорость станет больше V1, то в блок 9 выдается сигнал на присвоение пороговому значению значения текущего угла. В результате произойдет включение ИО, которое будет производиться по описанной выше логике.
В исходное состояние устройство приводится при срабатывании зоны нечувствительности 9 противоположного знака. Если раньше скорость превысит величину порога противоположного знака блока 12, то снова производится присвоение пороговому значению блока 9 значение текущего угла, а измененное ранее пороговое значение (противоположного знака) также приводится в исходное состояние.
Устройство обладает высоким качеством переходных процессов как при отсутствии внешних возмущений, так и при их наличии, и не имеет ограничений при реализации устройства на базе аналоговой техники. Однако реализация его в дискретных устройствах стабилизации ограничивается по следующим причинам. Во-первых, регулирование скорости ухудшается из-за дополнительного запаздывания, вносимого апериодической обратной связью. Во-вторых, наличие интегратора в дискретных устройствах стабилизации ограничивает величину коэффициента усиления блока 9, что также вносит запаздывание, величина которого будет не менее 1.5 - 2-х тактов работы устройства стабилизации. В третьих, данное устройство требует обязательного наличия и датчика угла и датчика угловой скорости, что не всегда выполнимо. Эти обстоятельства ограничивают возможность применения данного устройства при реализации вообще и на базе дискретной техники в частности.
Техническим результатом изобретения является повышение качества управления.
Технический результат достигается тем, что в способ управления динамическим объектом, включающий определение угла рассогласования, приложение управляющих воздействий от минимальных до постоянно действующих в момент превышения углом рассогласования заданной точности в установившемся режиме d1, приложение управляющего воздействия в момент превышения текущей скоростью заданной точности по скорости при угле рассогласования менее заданной точности поддержания ориентации d1, отличающийся тем, что приложение минимальных периодически повторяемых управляющих воздействий производят при значениях угла рассогласования от d1 до d2, где величина d2 выбирается из условия допустимого превышения заданной точности по углу в установившемся режиме стабилизационных колебаний (d2 > d1), приложение управляющих воздействий при значениях угла рассогласования от d2 до d3, где величина d3 выбирается из условия допустимого превышения углом рассогласования заданной точности в переходных процессах (d3 > d2), длительность управляющих воздействий в диапазоне значений угла от d2 до d3 увеличивают пропорционально величине превышения углом рассогласования значения d2, а обнуление управляющего воздействия производят при смене знака приращения угла на противоположный, приложение управляющих воздействий при значениях угла рассогласования более d3 производят до достижения текущей скоростью программного значения, после достижения значений угла и угловой скоростью заданных точностей поддержания ориентированного положения в момент достижения заданной точности по углу d1 производят определение средней скорости рассогласования, а приложение периодически повторяемых минимальных управляющих воздействий при значениях угла от d1 до d2 производят до достижения приращением скорости объекта управления, вычисляемого по расчетным динамическим характеристикам, значения запомненной средней скорости рассогласования или до смены знака приращения угла рассогласования, знак управляющего воздействия при всех приложениях управляющих воздействий выбирают противоположным знаку угла рассогласования, обнуление управляющих воздействий производят также при значениях скорости менее заданного порога на выключение при угле рассогласования меньше заданной точности поддержания ориентации d1.
Технический результат в предлагаемом способе управления достигается за счет следующего:
- при принятии решения о моментах приложения и обнуления управляющих воздействий применен раздельный анализ значений угла и угловой скорости, что позволяет сократить время переходного процесса при устранении начального рассогласования по углу и угловой скорости,
- при малых значениях угловой скорости (меньше порогового значения или вблизи нуля), когда паразитные составляющие могут превышать значение скорости, используют знак угла для присвоения знака управляющего воздействия и факт смены знака приращения угла для обнуления воздействия,
- в тех случаях, когда использование угловой скорости необходимо, значение скорости принципиально отличается от нуля, а потому ошибки определения скорости не могут оказать принципиального влияния на качество регулирования,
- после окончания переходных процессов, связанных с отработкой начального рассогласования, при превышении углом рассогласования заданной точности поддержания ориентации производят ограничение количества прикладываемых минимальных управляющих воздействий, для чего вычисляется средняя скорость, а по расчетным характеристикам объекта управления вычисляют приращение скорости; обнуление управляющего воздействия производится при равенстве запомненного значения средней скорости и величины вычисленного приращения скорости или при смене знака приращения угла.
Моделирование показало, что качество переходных процессов в дискретном автомате стабилизации с тактом работы 0.2 секунды, построенном на основе предлагаемых решений, превосходит качество переходных процессов прототипа, являющегося аналоговым автоматом стабилизации. При этом необходимо учесть, что запаздывание в определении скорости в дискретном автомате составляло 0.13 секунды, а в аналоговом - постоянная времени при определении скорости - 0.02 секунды.
Введение зоны по углу при превышении его значения заданной точности d1, в которой выдают только минимальные импульсы, обеспечивает изменение скорости на минимально возможную величину и делает этот процесс не зависящим от флюктуаций, а в ряде случаев и от влияния упругих колебаний конструкции, поскольку их влияние на значение скорости вблизи нуля выше, чем на показания угла, принципиально имеющего регулярную составляющую, равную зоне нечувствительности.
Увеличение длительности включение ИО, начиная с выбранного значения угла d2, позволяет поддерживать требуемую точность по углу при установившихся стабилизационных колебаниях.
Включение ИО до набора объектом управления программного значения скорости при значениях угла более d3 обеспечивает приведение параметров управления к номинальному состоянию.
По окончании переходных процессов, связанных с отработкой начальных рассогласований, в зоне выдачи минимальных импульсов производится дополнительное ограничение на их количество; управляющее воздействие обнуляют при равенстве запомненного значения средней скорости, вычисленной в момент превышения углом рассогласования заданной точности d1, вычисленному приращению скорости по расчетным характеристикам объекта управления.
Выбор значений d1, d2 и d3 зависит от решения конкретной задачи по управлению для конкретного объекта управления. И если значение заданной точности по углу d1 задается техническими условиями, то значения d2 и d3 определяются прежде всего свойствами объекта управления и характеристиками исполнительных органов.
Для многих задач ориентации (на основании опыта эксплуатации систем ориентации) приемлемое соотношение между d1 и d3
d3= 3 d1
Выбор значения d2, которое должно лежать внутри интервала "d1 - d3" и определяет интенсивность нарастания управляющих воздействий, возможен по следующей эмпирической зависимости
d2=2d1
Технический результат в устройстве управления динамическим объектом, реализующем предлагаемый способ управления, достигается тем, что в устройство, состоящее из блока выдачи угла, первого блока формирования зоны нечувствительности, управляемого блока формирования зоны нечувствительности и исполнительных органов, причем выход блока выдачи угла через первый блок формирования зоны нечувствительности подключен к управляемому блоку формирования зоны нечувствительности, отличающееся тем, что в него дополнительно введены блок формирования импульсов, второй, третий и четвертый блоки формирования зоны нечувствительности, первый, второй и третий блоки вычисления импульсов, первый, второй и третий блоки коммутации, блок вычисления текущей скорости, блок определения изменения знака приращения угла, блок определения готовности ориентации, блок вычисления средней скорости, блок запоминания, блок вычисления приращения скорости и блок сравнения, причем выход управляемого блока формирования зоны нечувствительности через блок формирования импульсов соединен с исполнительными органами, выход блока выдачи угла подключен к блоку вычисления текущей скорости, блоку определения изменения знака приращения угла, к второму и третьему блокам вычисления импульсов, к второму, третьему и четвертому блокам формирования зоны нечувствительности, блоку вычисления средней скорости и блоку определения готовности ориентации, выход блока вычисления текущей скорости подключен к управляемому блоку формирования зоны нечувствительности, блоку определения готовности ориентации и к третьему блоку вычисления импульсов, один выход второго блока формирования зоны нечувствительности через последовательно включенные первый блок вычисления импульсов, второй блок коммутации и первый блок коммутации, ко второму входу которого подключен выход блока определения изменения знака приращения угла, соединен с исполнительными органами, второй выход второго блока формирования зоны нечувствительности через последовательно включенные третий блок коммутации, блок вычисления средней скорости, блок запоминания и блок сравнения, к второму входу которого подключен другой выход первого блока вычисления импульсов через блок вычисления приращений, соединен с вторым блоком коммутации, выход третьего блока формирования зоны нечувствительности через второй блок вычисления импульсов, соединен с первым блоком коммутации, выход четвертого блока формирования зоны нечувствительности через третий блок вычисления импульсов соединен с исполнительными органами, выход блока определения готовности ориентации соединен с вторым входом третьего блока коммутации.
Технический результат в предлагаемом устройстве достигается за счет следующего:
- в устройстве исключено определение моментов включения и выключения исполнительных органов по суммарному сигналу угла и угловой скорости, что уменьшает время переходных процессов с одновременным уменьшением количества включений исполнительных органов,
- при близких к нулю значениях скорости объекта управления скорость не используется при принятии решения о включении или выключении исполнительных органов, что исключает влияние ошибок ее определения на переходные и установившиеся процессы,
- в тех случаях, когда использование угловой скорости необходимо, значение скорости или отлично от нуля или превышает введенные зоны нечувствительности по скорости, а потому ошибки определения скорости не могут оказать принципиального влияния на качество регулирования и точность стабилизации в установившемся режиме,
- введение зоны по углу рассогласования, к которой ограничивается величина изменения скорости объекта управления после окончания переходных процессов, связанных с парированием начальных условий, значением вычисленной средней скорости на заранее выбранном интервале, уменьшает зависимость качества управления от периодических составляющих в установившемся режиме поддержания ориентированного положения.
Введение зоны по углу рассогласования |d1| < |fi| < |d2|, где выдаются управляющие импульсы только минимальной длительности, до смены знака приращения угла на противоположный или до набора объектом управления скорости, равной вычисленной средней скорости, обеспечивает минимальное изменение скорости независимо от точности знания текущей скорости.
Увеличение длительности управляющих импульсов в зоне |d2| < |fi| < |d3| только в зависимости от величины угла также повышает устойчивость и точность работы автомата при близких к нулю значений скоростей.
В тех случаях, когда в предлагаемом техническом решении используется значение текущей скорости рассогласования (при |fi| < |d1| и |fi| > |d3|), точность знания скорости не оказывает влияния на качество процесса. В этих случаях значение угловой скорости отличается от нуля, и ошибка знания ее может оказать влияние только на время переходного процесса и расход рабочего тела.
Присвоение знака управляющего воздействия при углах рассогласования |fi| > |d1| пo знаку угла исключает возможность выдачи управляющего воздействия ошибочного знака. Ошибочная выдача знака управляющего воздействия при всплесках скорости (из-за шумов или влияния упругих свойств объекта управления) возможна и в аналоге, и в прототипе.
Достоинством предлагаемого технического решения является также необязательность наличия датчика угловой скорости объекта управления. Для тех моментов при управлении, когда необходимо знание скорости, в предлагаемом устройстве используется вычисляемое значение скорости. И в этих случаях ошибки знания скорости влияют только на время переходного процесса. На точность и скорость объекта управления в установившемся режиме ошибки ее вычисления не влияют.
При угле рассогласования |fi| < |d1| и при превышении угловой скоростью заданного в 2-ой зоне нечувствительности порога V1 производятся включения исполнительных органов для уменьшения скорости. Включения прекращаются при уменьшении скорости до значений меньше заданного в 2-ой зоне нечувствительности порога на выключение V2.
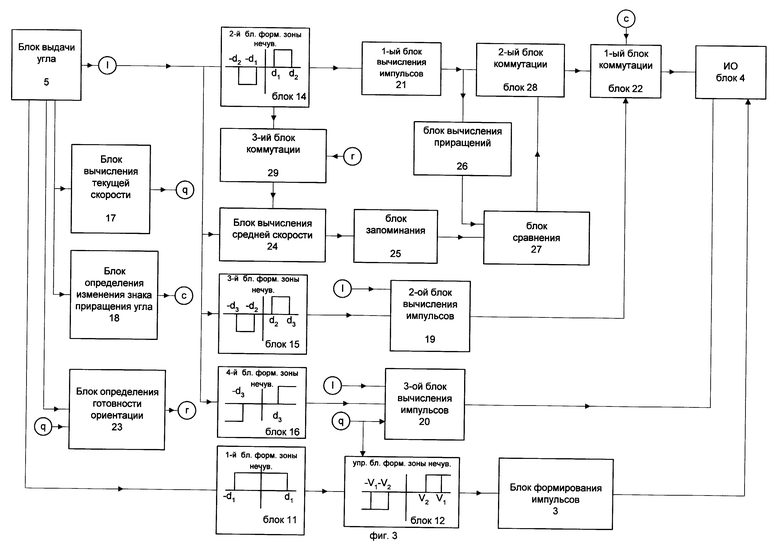
Суть изобретения может быть пояснена с помощью фиг. 3, на которой приведена блок-схема устройства.
Устройство состоит из исполнительных органов 4, блока выдачи угла 5, блоков формирования зоны нечувствительности 11, 14, 15, 16, управляемого блока формирования зоны нечувствительности 12, блока формирования импульсов 3, блока вычисления текущей скорости 17, блока определения изменения знака приращения угла 18, блоков вычисления импульсов 19, 20, 21, блоков коммутации 22, 28, 29, блока определения готовности ориентации 23, блока вычисления средней скорости 24, блока запоминания 25, блока вычисления приращения скорости 26 и блока сравнения 27. Выход блока 5 соединен с входами блоков 11, 14, 15, 16, 17, 18, 19, 20, 23 и 24. Выход блока 17 соединен с блоками 12, 20 и 23. Выход блока 18 подключен к входу блока 22. Один выход блока 14 через последовательно включенные блоки 21, 28 и 22 соединен с блоком 4. Другой выход блока 14 через последовательно включенные блок 29, блок 24, блок 25 и блок 27 соединен с блоком 28. Второй выход блока 21 через блок 26 соединен с блоком 27. Выход блока 23 соединен с блоком 29. Выход блока 15 через блок 19 подключен к блоку 22. Выход блока 16 через блок 20 соединен с блоком 4. Выход блока 11 через последовательно включенные блоки 12 и 3 соединен с блоком 4.
При осуществлении ориентации относительно заданного положения угол рассогласования fi из блока выдачи угла 5 поступает на входы блоков формирования зоны нечувствительности 11, 14, 15 и 16. Каждая из зон настроена на определенное значение для выполнения функций в соответствие с заложенной логикой управления.
При |fi| < |d1| блок 11 выдает команду в блок 12. При наличии этой команды блок 12 сравнивает значение скорости, вычисляемое в блоке 17, с заданным порогом. Если текущее значение скорости окажется более (или менее для отрицательных скоростей) заданного порога V1, то величина превышения порога выдается в блок 3, в котором пропорционально величине сигнала формируются импульсы, которые и выдаются в блок 4 на включение ИО. Выключение ИО осуществляется при уменьшении текущего значения скорости до значения, задаваемого порогом на выключение V2 в блоке 12.
При |d1| < |fi| < |d2| блок 14 выдает команду в блок 21 на выдачу периодически повторяемых с наперед заданной частотой импульсов, обеспечивающих включение ИО на минимальное время. Знак выдаваемых импульсов назначается противоположным знаку угла fi. При изменении знака приращения угла на противоположный, определяемого в блоке 18, блок коммутации 22, соединенный с блоком 18, запрещает выдачу управляющих импульсов на включение ИО (блок 4).
При |d2| < |fi| < |d3| блок 15 выдает команду в блок 19 на выдачу периодически повторяемых с наперед заданной частотой импульсов, обеспечивающих включение ИО на время, пропорциональное величине превышения угла заданного порогового значения |d2|. Знак выдаваемых импульсов назначается противоположным знаку угла fi. При изменении знака приращения угла на противоположный, определяемого в блоке 18, блок коммутации 22, соединенный с блоком 18, запрещает выдачу управляющих импульсов на включение ИО.
При |fi| > |d3| блок 16 выдает команду в блок 20 на выдачу управляющего воздействия для набора угловой скорости, значение которой задается в виде функции, например линейной, величине превышения угла заданного порогового значения |d3|. Включение ИО может быть импульсным или непрерывным, что определяется величиной скорости и характеристиками исполнительных органов. Знак выдаваемых импульсов назначается противоположным знаку угла fi. Включение ИО прекращается при значении текущей скорости, равном программной скорости.
Предлагаемое устройство может быть реализовано известными техническими решениями.
Блок выдачи угла 5 может быть исполнен в виде солнечного или звездного датчика, используемых на орбитальной станции "Мир".
Блоки 11, 14, 15, 16 (блоки формирования зоны нечувствительности) могут быть выполнены на основе стандартных усилителей и схем сравнения.
Управляемый блок формирования зоны нечувствительности 12 может быть выполнен на основе стандартных усилителей и схем сравнения и контактов реле, отключающих или подключающих его входы, обмотки управления которых подключаются к соответствующим блокам.
Блоки 3, 19, 20, 21 могут быть выполнены на основе стандартных усилителей и генераторов прямоугольных импульсов с широтной модуляцией.
Блок вычисления текущей скорости 17 и блок вычисления средней скорости 24 могут быть реализованы двумя способами, выбор которых зависит от динамических свойств объекта управления. Вычисление скорости можно производить с помощью интегратора, включенного в обратную связь усилителя (или решать соответствующее дифференциальное уравнение в бортовом компьютере), если динамическая ошибка по скорости при включении ИО будет не более заданного в блоке 12 порога по угловой скорости. Вычисление скорости можно выполнять и по величине приращения угла на заданном такте работы дискретного автомата. В этом случае блок 17 может быть реализован с помощью стандартных усилителей и интеграторов, используемых для запоминания значения угла на данном такте.
Блок определения изменения знака приращения угла 18 может быть выполнен на основе стандартных усилителей и интеграторов для запоминания величин значения угла с целью вычисления приращения угла на данном такте работы и для запоминания знака приращения угла, а также стандартных схем сравнения и реле для определения момента изменения знака приращения угла и выдачи команд в блок коммутации 22.
Блоки коммутации 22, 28 и 29 могут быть выполнены на основе стандартных реле с нормально замкнутыми и разомкнутыми контактами.
Блок запоминания 25 может быть выполнен на основе стандартных усилителей, интеграторов и электронных переключателей.
Блок вычисления приращения 26 может быть выполнен на основе стандартных интеграторов и усилителей.
Блок сравнения 27 может быть выполнен на основе стандартных усилителей и реле с нормально замкнутыми и разомкнутыми контактами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144691C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ | 1998 |
|
RU2158951C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270790C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 2002 |
|
RU2225811C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС ПРИ ПОДДЕРЖАНИИ ОРИЕНТАЦИИ | 2009 |
|
RU2412872C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО КОРАБЛЯ ПРИ ПРИЧАЛИВАНИИ | 2011 |
|
RU2482033C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 2002 |
|
RU2225812C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270789C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОДДЕРЖАНИИ ОРИЕНТАЦИИ | 2008 |
|
RU2376215C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС ДЛЯ ПОДДЕРЖАНИЯ ОРИЕНТАЦИИ ПРИ ДЕЙСТВИИ ВОЗМУЩАЮЩЕГО УСКОРЕНИЯ | 2009 |
|
RU2410296C2 |
Способ управления динамическим объектом и устройство для его осуществления могут быть использованы для управления угловым .движением динамических объектов, например, космических кораблей. Технический результат заключается в повышении качества управления, который достигается за счет того, что в способе управления и устройстве, реализующем этот способ, введено приложение управляющих воздействий при превышении углом заданной точности ориентации по углу или при превышении угловой скоростью заданной точности по скорости, если значение угла меньше заданной точности ориентации по углу. Наличие независимых ветвей определения моментов приложения управляющих воздействий и назначение длительности их обеспечивает варьирование коэффициентов управления раздельно в каждой из ветвей, например порогов срабатывания, длительностей импульсов, коэффициентов демпфирования, без изменения переходных характеристик в соседней ветви. Кроме этого, в тех случаях, когда влиянием упругих свойств объекта управления пренебречь нельзя, предлагаемое техническое решение ограничивает длительность приложения управляющего воздействия при превышении углом заданной зоны нечувствительности. 2 с.п.ф-лы, 3 ил.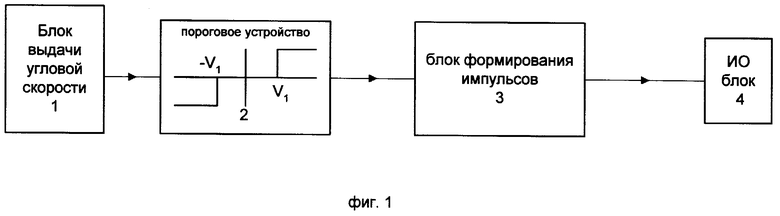
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| US 4171115, 16.10.79 | |||
| Лебедев А.А | |||
| и др | |||
| Встреча на орбите.-М.: Машиностроение, 1969 | |||
| Беляев Н.М | |||
| и др | |||
| Реактивные системы управления космических летательных аппаратов.-М.: Машиностроение, 1979, с.11-23. | |||
