Изобретение относится к космической технике и может быть использовано для поддержания ориентации космического аппарата (КА) при действии возмущающего ускорения, например, от включения исполнительных органов (ИО) для управления положением линии визирования при сближении и причаливании.
Известен способ управления КА, (патент 2144692 от 17.08.98.), включающий определение угла рассогласования и угловой скорости, в котором при поддержании ориентации используется раздельный анализ значений угла и угловой скорости относительно заданных пороговых значений.
Если при величине угла, меньшей порога срабатывания, значение угловой скорости превысит заданный порог по скорости, этот факт принимается за появление возмущающего ускорения, а потому производится перестройка функционирования алгоритма. Для этого запоминается значение угла, при котором произошло превышение порога срабатывания по угловой скорости, и начинается вычисление разности между запомненным и текущим значениями угла. По вычисленной разности и коэффициенту демпфирования определяется требуемое значение угловой скорости для данного рассогласования. Это значение требуемой скорости суммируется (по модулю) с текущим значением угловой скорости и по отношению этой суммы к значению управляющего ускорения определяется длительность приложения управляющего воздействия вокруг центра масс со знаком, противоположным знаку вычисленной разности углов. При смене знака вычисленной разности углов на противоположный алгоритм управления приводится к исходному состоянию - сбрасывается запомненное значение угла и возобновляется раздельное сравнение угла и угловой скорости с заданными пороговыми значениями.
Этот способ управления при наличии возмущающего момента обеспечивает среднее значение угловой скорости, меньшее заданного порогового значения, только в установившемся режиме. Перестройка алгоритма по факту превышения угловой скоростью порогового значения приводит к неизбежному скачку угловой скорости в начальной фазе, величина которого зависит от величины возмущающего ускорения и запаздывания в сигнале угловой скорости. При увеличении возмущающего ускорения и запаздывания амплитуда скачка угловой скорости увеличивается и, неизбежно, увеличивается длительность переходного процесса до установившегося режима, при котором среднее значение угловой скорости меньше заданного порогового значения.
Известен способ управления КА, выбранный в качестве прототипа (патент 2270789 от 27.11.2003.), включающий определение угла рассогласования и угловой скорости, в котором при поддержании ориентированного положения формируется управляющая функции ξ=Ψ+K·ω, где - Ψ - угол рассогласования, ω - угловая скорость, К - коэффициент демпфирования.
При превышении ξ заданного порогового значения производится приложение управляющего воздействия вокруг центра масс, длительность которого пропорциональна величине ξ. Приложение управляющего воздействия прекращается при величине ξ, меньшей заданного порогового значения.
Для повышения качества переходного процесса при воздействии на КА возмущающего момента от включения ИО, управляющих движением центра масс, введено приложение компенсирующих управляющих воздействий вокруг центра масс одновременно с появлением возмущающего ускорения.
До начала процесса стабилизации производят приложение тестового воздействия заданной длительности в заданном канале управления движением центра масс и определяют приращение угловой скорости за промежуток времени внутри заданной длительности тестового воздействия. По отношению приращения угловой скорости к длительности этого промежутка определяют величину возмущающего ускорения. Затем определяют коэффициент пропорциональности по отношению определенного возмущающего ускорения к расчетному управляющему ускорению вокруг центра масс.
При появлении возмущающего ускорения рассчитывается длительность компенсирующего управляющего воздействия вокруг центра масс по длительности приложения управляющих воздействий по центру масс с учетом коэффициента пропорциональности. Для регулирования угловых координат при наличии возмущающего ускорения длительность управляющего воздействия вокруг центра масс, рассчитанная по требуемому приращению угловой скорости, увеличивается на величину, необходимую для компенсации возмущающего ускорения.
Этот способ управления уменьшает амплитуду начального скачка угловой скорости при появлении возмущающего момента и, как следствие, уменьшает время переходного процесса к установившемуся режиму. Тем не менее, в условиях действующих ускорений вокруг центра масс (возмущающего и управляющего) увеличивается влияние динамической ошибки в сигнале угловой скорости на процесс стабилизации, приводящее к увеличению амплитуды колебаний по угловой скорости в переходных процессах. Кроме того, при фактических значениях возмущающего и управляющего ускорений, отличающихся от используемых в расчетах, также будет увеличиваться амплитуда колебаний по угловой скорости.
В рассматриваемом способе управления при превышении управляющей функции ξ заданного порогового значения знак управляющего воздействия задается противоположным знаку управляющей функции. Вследствие этого, а также из-за ошибок измерения угловой скорости, знак управляющего воздействия вокруг центра масс может оказаться в фазе с возмущающим ускорением. Это приведет к увеличенным амплитудам колебаний угловой скорости из-за сложения возмущающего и управляющего ускорений
Техническим результатом предлагаемого решения является повышение качества переходного процесса при действии на КА возмущающего момента, а именно уменьшение амплитуды колебаний угловой скорости и длительности переходного процесса до установившегося режима, а в установившемся режиме - не только малые отклонения угловой скорости от номинального значения, но и незначительное рассогласование по углу, не превышающее величины порогового значения.
Технический результат достигается тем, что в способ управления движением космического аппарата вокруг центра масс для поддержании ориентации при действии возмущающего ускорения, включающий определение угла рассогласования и угловой скорости вокруг центра масс, приложение тестового воздействия заданной длительности в заданном канале управления движением центра масс для определения величины возмущающего ускорения по отношению приращения угловой скорости за промежуток времени внутри заданной длительности тестового воздействия к длительности этого промежутка, определение коэффициента пропорциональности К0, по отношению модуля определенного возмущающего ускорения к модулю управляющего ускорения вокруг центра масс, определение длительности приложения компенсирующего воздействия вокруг центра масс по длительности приложения управляющего воздействия по центру масс с учетом коэффициента пропорциональности, отличающийся тем, что корректируют сигнал угловой скорости вокруг центра масс по величинам и длительностям действия управляющего и возмущающего ускорений с учетом их знаков, сравнивают значения угла ухода, определяемого по скорректированной угловой скорости и скорректированной угловой скорости с заданными порогами срабатывания, определяют знак возмущающего ускорения по знаку приращения угловой скорости при тестовом воздействии, производят определение величины регулировочного коэффициента Кр (в функции от угла рассогласования по формуле Кр=[1+f(λ)·sign(tцм)]), причем при одинаковых знаках возмущающего ускорения и угла рассогласования значение регулировочного коэффициента Кр больше единицы, а при разных знаках - меньше единицы, при каждом обнулении угла рассогласования запоминают значение регулировочного коэффициента Kp зап=Кр, а при очередном определении угла рассогласования запомненное значение регулировочного коэффициента Kp зап принимают за начальное Кр=Kp зап, и корректируют оценку возмущающего ускорения и коэффициента пропорциональности по величине регулировочного коэффициента, длительность приложения компенсирующего воздействия вокруг центра масс вычисляют по длительности приложения управляющего воздействия по центру масс с учетом коэффициентов пропорциональности К0, регулировочного Кр и экспериментально установленного Kj экс, величину которого определяют по величинам скорректированной угловой скорости и угла ухода, их запомненных значений, а также с учетом знаков возмущающего ускорения и скорректированной угловой скорости, и знаков запомненной и текущей скорректированной угловой скорости, при величине скорректированной угловой скорости, меньшей заданного порога срабатывания, производят приложение компенсирующего воздействия вокруг центра масс, а при одинаковых знаках скорректированной угловой скорости и возмущающего ускорения дополнительно вычисляют углы рассогласования и ухода, запоминают начальные значения угла ухода и скорректированной угловой скорости для определения величины экспериментально установленного коэффициента Kj экс, знак приложения управляющего воздействия противоположен знаку возмущающего ускорения, при величине скорректированной угловой скорости, большей заданного порога срабатывания, производят приложение управляющего воздействия вокруг центра масс, суммарная длительность которого состоит из длительности, определенной по отношению скорректированной угловой скорости к управляющему ускорению вокруг центра масс, и длительности приложения компенсирующего воздействия, а при одинаковых знаках скорректированной угловой скорости и возмущающего ускорения дополнительно обнуляют и вновь определяют углы рассогласования и ухода, запоминают их начальные значения и начальное значение скорректированной угловой скорости, знак приложения управляющего воздействия противоположен знаку возмущающего ускорения, после чего определение регулировочного коэффициента Кр производят только при одинаковых знаках запомненного и текущего значений углов рассогласования, причем при скорректированной угловой скорости, меньшей порога срабатывания, производят приложение компенсирующего воздействия вокруг центра масс, а при скорректированной угловой скорости, большей порога срабатывания, производят приложение управляющего воздействия вокруг центра масс, суммарная длительность которого состоит из длительности, определенной по отношению скорректированной угловой скорости к управляющему ускорению вокруг центра, и длительности компенсирующего воздействия, знак приложения управляющего воздействия противоположен знаку возмущающего ускорения, для изменения и поддержания заданного значения угловой скорости вокруг центра масс вычисляют разность между требуемым и текущим значениями угловой скорости, при величине указанной разности, большей заданного порога срабатывания, и разных знаках указанной разности и возмущающего ускорения производят приложение управляющего воздействия, суммарная длительность которого определяют по длительности, вычисляемой по отношению указанной разности к управляющему ускорению вокруг центра масс, и длительности компенсирующего воздействия, определенного с учетом запомненного значения регулировочного коэффициента Kp зап, коэффициента пропорциональности К0 и экспериментально установленного коэффициента Kj экс, значение которого определяют по величине указанной разности, а при одинаковых знаках указанной разности и возмущающего ускорения производят приложение компенсирующего воздействия только при величине динамической ошибки, определяемой величиной возмущающего ускорения и запаздыванием в сигнале угловой скорости, большей заданного порога срабатывания по угловой скорости, при этом длительность компенсирующего воздействия, определенную с использованием запомненного значения регулировочного коэффициента Kp зап и коэффициента пропорциональности К0 уменьшают введением коэффициента Квр, чтобы указанная динамическая ошибка была меньше заданного порога срабатывания, при указанной разности, меньшей заданного порога срабатывания по угловой скорости, производят приложение только компенсирующего воздействия, длительность которого определяют с учетом запомненного значения регулировочного коэффициента Kp зап и коэффициента пропорциональности К0 при разных знаках указанной разности и возмущающего ускорения, а при одинаковых знаках - длительность компенсирующего включения определяют с учетом регулировочного коэффициента Kp зап, коэффициента пропорциональности К0 и экспериментально устанавливаемого Kj экс, значение которого уменьшает длительность компенсирующего включения на величину, определяемую по указанной разности и знаков этой разности и возмущающего ускорения, знак приложения управляющего воздействия противоположен знаку возмущающего ускорения.
Оценка не только величины возмущающего ускорения, но и его знака при тестовом приложении управляющего воздействия по центру масс позволяет вносить поправку в сигнал датчика угловой скорости и получать скорректированную угловую скорость по уравнению (1)

и вычислять угол ухода

Коэффициент пропорциональности К0, определяющий соотношение между возмущающим и управляющим ускорениями вокруг центра масс
и тогда длительность приложения компенсирующего воздействия вокруг центра масс top будет

В приведенных формулах:
φ - угол ухода,
φ0 - начальное значение угла ухода, φ0=0,
Ω - скорректированная угловая скорость,
ωдус - угловая скорость КА,
tцм - длительность приложения управляющего воздействия по центру масс,
µцм - оценка возмущающего ускорения,
top - длительность приложения компенсирующего воздействия вокруг центра масс,
µop - расчетное значение управляющего ускорения вокруг центра масс,
t - время.
Введение сравнения значения угла ухода с заданным порогом срабатывания и скорректированной угловой скорости с заданным порогом срабатывания вместо управления по суммарному сигналу, как это делается в прототипе, позволяет повысить качество переходного процесса. Принятие решения о приложении управляющего воздействия вокруг центра масс по факту, что скорректированная угловая скорость больше или меньше заданного порога срабатывания с учетом наличия требования на приложение управляющего воздействия по центру масс, однозначно свидетельствует о действии возмущающего ускорения и позволяет принять адекватные меры для его нейтрализации.
При точном знании возмущающего и управляющего ускорений корректирующие добавки будут нейтрализовать друг друга,
tцмµцм+topµop=0
а потому и величины скорректированной скорости Ω и угловой скорости КА - ωдус будут одинаковы. Однако при неточном знании величин ускорений корректирующие добавки не скомпенсируют друг друга, и это приведет к статической ошибке по угловой скорости ωдус. Как следствие, угол рассогласования КА - λ, получаемый интегрированием сигнала угловой скорости, будет изменяться под влиянием статической ошибки по угловой скорости. В то же время угол ухода φ, получаемый интегрированием скорректированной угловой скорости и используемый в алгоритме вместе со скорректированной угловой скоростью при приложении управляющих воздействий для поддержания ориентированного положения, будет в небольших пределах колебаться около нулевого значения. Величина статической ошибки по угловой скорости КА «неуправляема» и определяется ошибками возмущающего и управляющего ускорений. При коротком по длительности действии возмущающего ускорения (до 10-20 секунд) и небольшом отклонении оценки возмущающего ускорения от номинала (в пределах до ≈30%) изменение угла рассогласования будет незначительно (до 1 градуса) и может не оказывать отрицательного влияния на процесс управления. При длительном действии возмущающего ускорения (до 100 секунд) величина угла может быть значительной (до 3-х градусов и более) и сказаться на процессе стабилизации.
Для исключения влияния ошибки знания возмущающего ускорения в уравнение (1) введен регулировочный коэффициент Кр. С учетом этого, уравнение для скорректированной угловой скорости примет вид

Значение регулировочного коэффициента Кр вычисляется по формуле

где λ

λ - угол рассогласования КА,
λ0 - начальное значение угла рассогласования, λ0=0,
и тогда длительность компенсирующего включения

Как видно из формулы (3), величина регулировочного коэффициента Кр будет меняться в зависимости от величины λ и соотношения знаков возмущающего ускорения и угла рассогласования. Функция f(λ) может быть, например, линейной или многоступенчатой, релейной. Соотношение знаков возмущающего ускорения tцм и угла рассогласования λ определяет, каким должно быть значение Кр - больше или меньше единицы. Одинаковые знаки означают, что оценка возмущающего ускорения завышена, а потому регулировочный коэффициент Кр должен быть меньше единицы. Разные знаки свидетельствуют о том, что оценка возмущающего ускорения занижена, а потому регулировочный коэффициент Кр должен быть больше единицы. При каждом обнулении угла рассогласования запоминается последнее значение регулировочного коэффициента Кр зап=Кр.
При приложении управляющего воздействия по центру масс функционирование способа управления происходит следующим образом.
На первом этапе при скорректированной угловой скорости, меньшей заданного порога, начинается вычисление угла рассогласования λ, и по его величине с учетом знаков возмущающего ускорения и угла рассогласования (как описано выше) корректируется регулировочный коэффициент Кр. Причем коррекция величины Кр производится и для его значений больше единицы и меньше единицы. С учетом изменения величины Кр меняется длительность компенсирующего включения вокруг центра масс по формуле (5).
Одновременно начинается сравнение знаков возмущающего ускорения и скорректированной угловой скорости Ω. При одинаковых знаках запоминается текущее значение Ω0=Ω, начальное значение φ0 и начнется интегрирование угла ухода φ


Примечание 1. При реализации способа управления в вычислительной машине величине t в формулах (6, 7) присваивается такт ее вычислительного процесса.
В формулу вычисления длительности компенсирующего включения tк введен экспериментально установленный коэффициент Kj экс

Величиной Kj экс регулируется отклонение длительности компенсирующего включения от номинального значения для поддержания угла ухода и скорректированной угловой скорости в заданных пределах. Конкретное значение Kj экс зависит от соотношения знаков возмущающего ускорения и скорректированной угловой скорости, от знаков запомненного и текущего значений угла ухода φ, его величины, а также от соотношения знаков текущей угловой скорости Ω и ее запомненного значения. При разных знаках скорректированной угловой скорости и возмущающего ускорения длительность компенсирующего включения уменьшают от номинального значения коэффициентом Kj экс, для того чтобы возмущающим ускорением изменить знак скорректированной угловой скорости. Величина уменьшения Kj экс зависит от величин скорректированной угловой скорости и угла ухода, от знаков скорректированной угловой скорости и возмущающего ускорения. Уменьшение длительности компенсирующего включения введено для того, чтобы не допустить перерегулирования по угловой скорости выше порогового значения. При одинаковых знаках скорректированной угловой скорости и возмущающего ускорения также производится уменьшение Kj экс в зависимости от величин скорректированной угловой скорости и угла ухода, знаков скорректированной угловой скорости и возмущающего ускорения, но в меньшей степени, чем при разных знаках возмущающего ускорения и скорректированной угловой скорости. При увеличении значения угла ухода и скорректированной угловой скорости длительность компенсирующего включения приближают к номинальной, для чего значение Kj экс увеличивается и приближается к единице. Значения выбранных коэффициентов Kj экс подтверждены моделированием.
Таким образом на первом этапе длительность приложения управляющего воздействия вокруг центра масс определяется только длительностью компенсирующего включения top=tк. Знак приложения управляющего воздействия назначают противоположным знаку возмущающего ускорения.
Описанный выше процесс продолжается или до прекращения действия возмущающего ускорения или до превышения скорректированной угловой скоростью заданного порога срабатывания. При этом запоминается значение регулировочного коэффициента Kp зап=Кр.
Знак приложения управляющего воздействия вокруг центра масс на этапе 1 противоположен знаку возмущающего ускорения.
На втором этапе при превышении скорректированной угловой скоростью Ω порога срабатывания и одинаковых знаках Ω и возмущающего ускорения производится обнуление величин φ и λ, а также обнуление запомненных начальных значений скорректированной угловой скорости Ω0 и угла ухода φ0. Одновременно вновь начинается интегрирование углов φ и λ, вновь запоминаются начальные значения φ0, λ0 и скорректированной угловой скорости Ω0. Начальное значение λ0 вычисляется по формуле

где t - время (см. примечание 2).
За начальное значение регулировочного коэффициента принимается Kp зап.
Длительность приложения управляющего воздействия вокруг центра масс на 2-м этапе складывается из 2-х составляющих
- длительности компенсирующего включения

- и длительности, необходимой для гашения скорректированной угловой скорости

Суммарная длительность

Длительность компенсирующего включения от номинального уменьшается коэффициентом Kj экс на величину, определяемую логикой, изложенной по выбору этого коэффициента на первом этапе.
Примечание 2. Фактически этап 2 состоит из подготовки для функционирования на этапе 3 и приложения одного управляющего воздействия вокруг центра масс, длительностью t0.
Знак приложения управляющего воздействия вокруг центра масс на этапе 2 противоположен знаку возмущающего ускорения.
На третьем этапе при определении длительности компенсирующего включения учитывается запомненное значение Kp зап.

В отличие от второго этапа, на третьем коррекция регулировочного коэффициента Кр ведется только при одинаковых знаках текущего значения угла рассогласования и запомненного, чем обеспечивается изменение регулировочного коэффициента только при его значениях больше единицы, или меньше
На этом этапе управление вокруг центра масс разделяется на два подэтапа:
- при скорректированной угловой скорости большей, чем заданный порог срабатывания, и разных знаках возмущающего ускорения и скорректированной угловой скорости производится только компенсирующее включение длительности tк, а уменьшение длительности компенсирующего включения по логике первого этапа выполняется выбором значения коэффициента Kj экс. Уменьшение длительности компенсирующего включения - неполная компенсация выполняется для того, чтобы угловую скорость изменить за счет возмущающего ускорения.
Если знаки одинаковые, то длительность приложения управляющего воздействия складывается из 2-х составляющих. Первая - определяется по отношению величины скорректированной угловой скорости к управляющему ускорению вокруг центра масс (см. формулу 12), вторая - по длительности приложения компенсирующего включения (см. формулу 14).
- при скорректированной угловой скорости, меньшей порога срабатывания, и одинаковых или разных знаках возмущающего ускорения и скорректированной угловой скорости производят приложение компенсирующего воздействия вокруг центра масс, длительность которого определяют по формуле (14). Выбор конкретного значения Kj экс производится по той же логике, что и на первом этапе.
Описанный выше процесс продолжается до прекращения действия возмущающего ускорения. При этом запоминается последнее значение регулировочного коэффициента Kp зап, и последующая работа при очередном появлении возмущающего ускорения возобновится с запомненного значения Kp зап.
Знак приложения управляющего воздействия вокруг центра масс на этапе 3 противоположен знаку возмущающего ускорения.
На четвертом этапе способ управления обеспечивает набор требуемой угловой скорости вращения КА, поддержание набранной скорости и ее гашение при действии на КА возмущающего ускорения. Вычисляется разность между требуемой угловой скоростью и ее текущим значением - δω. Длительность приложения управляющего воздействия вокруг центра масс при величине разности, большей заданного порога срабатывания, и разных знаках разности и возмущающего ускорения определяется по длительности, необходимой для набора требуемой угловой скорости

и длительности компенсирующего включения

Выбор величины Kj экс производится по логике, изложенной по выбору этого коэффициента на первом этапе.
При одинаковых знаках - компенсирующее воздействие не выдается. Этим приемом обеспечивается изменение угловой скорости вращения КА за счет действия возмущающего ускорения. При большой величине возмущающего ускорения (30-50% от управляющего ускорения вокруг центра масс и выше) для улучшения качества переходного процесса компенсирующее воздействие должно быть выдано, но при этом ослаблено относительно номинальной величины. Уменьшение длительности компенсирующего включения достигается введением коэффициента Квр и должно быть таким, чтобы динамическая ошибка по угловой скорости была меньше заданного порога срабатывания по угловой скорости. Это позволит повысить точность регулирования и избежать перерегулирования угловой скорости.
В других случаях регулирование длительности компенсирующего включения производится изменением величины Kj экс в зависимости от величины разности между требуемой угловой скоростью и ее текущим значением по логике, изложенной по выбору этого коэффициента на первом этапе.
Знак приложения управляющего воздействия вокруг центра масс на этапе 4 противоположен знаку возмущающего ускорения.
Предлагаемый способ управления при появлении и действии возмущающего ускорения одновременно осуществляет приложение управляющего воздействия вокруг центра масс - компенсирующее включение, длительность которого определяется по отношению оценок возмущающего ускорения к управляющему. Цель этого включения - нейтрализовать действие возмущающего ускорения.
Вследствие возможных ошибок в оценках возмущающего и управляющего ускорений может появиться статическая ошибка по угловой скорости КА. По интегральной оценке этой статической ошибки - углу рассогласования КА относительно заданной системы координат производится уточнение отношения оценки возмущающего ускорения к управляющему. Одновременно на ту же величину производится и коррекция оценки возмущающего ускорения.
Этими приемами регулируется длительность номинального компенсирующего включения, что устраняет статическую ошибку по угловой скорости КА.
Таким образом, предлагаемое техническое решение обеспечивает автоматическую самоподстройку параметров управления вне зависимости от исходных величин возмущающего и управляющего ускорений и, как результат, независимость качества управления от фактически действующих возмущающих и управляющих ускорений.
На фиг.1-4 показаны переходные процессы при действии на КА возмущающего ускорения. Обозначения, принятые на фиг 1-4, соответствуют следующим обозначениям, принятым в данном тексте:
На фиг.1:
- ugk[2] - угол рассогласования λ,
- omk[2] - угловая скорость вокруг центра масс ωдус,
- tdl[2] - длительность приложения управляющего воздействия по центру масс tцм,
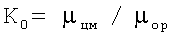
- На фиг.2:
- ACD[2] - оценка возмущающего ускорения µт,
- tdl[2] - длительность приложения управляющего воздействия по центру масс tцм
- На фиг.3:
- omkD[2] - угловая скорость вокруг центра масс ωдус,
- bt[2] - требуемая угловая скорость КА,
- На фиг.4:
- tok[2] - длительность приложения управляющего воздействия вокруг центра масс,
- tdl[2] - длительность приложения управляющего воздействия по центру масс tцм,
На регистрацию, приведенную на фиг.2, выведено µT - произведение, дающее значение текущей оценки возмущающего ускорения

Анализ графиков (фиг.1 и 2) показывает, что неточное значение начальной оценки возмущающего ускорения µцм (ACD[2]), которое равно 0.05 град/сек2 (при номинальной величине 0.222 град/сек2) приводит к появлению (см. фиг.1) угла рассогласования λ (ugk[2]). Одновременно начинается коррекция величины регулировочного коэффициента Кр. Примерно за 50 секунд действия возмущающего ускорения (см. фиг.2) под влиянием изменения значения Кр величина µт (ACD[2]) увеличилась с 0.05 до 0.125 град/сек2. Величина угловой скорости КА на этом участке (см. фиг.1) колеблется в пределах 0-0.05 град/ сек. Изменение угла рассогласования A (ugk[2]) за этот период составило ≈1 градус, а потому среднее значение угловой скорости на этом интервале - 0.02 град/сек. Это среднее значение определяется неточностью знания возмущающего ускорения. При λ (ugk[2]) больше 0.4 градуса (см. фиг.1) коррекция регулировочного коэффициента Кр прекратилась. При новом приложении управляющего воздействия по центру масс, длительностью ≈60 секунд, возобновляется оценка регулировочного коэффициента Кр. И значение µт (ACD[2]) с 0.125 град/сек2 увеличивается до ≈0.22 град/сек2. Затем это значение изменяется в пределах ≈0.22±(0.02-0.03) град/сек2. За это время угол рассогласования λ (ugk[2]) изменился на ≈0.07 градуса, что соответствует среднему значению угловой скорости на этом интервале ≈0.001 град/сек. После очередного появления возмущающего ускорения (в течение ≈125 секунда) изменение угла рассогласования λ (ugk[2]) было знакопеременным и не превышало 0.05 градуса. При этом величина оценки возмущающего ускорения изменялась в пределах 0.22±0.02 град/сек2.
Переходный процесс по набору требуемой угловой скорости при действии возмущающего ускорения и поддержанию заданного уровня угловой скорости приведен на фиг.3 и 4. Примерно на 250 секунде процесса появилось требование (bt[2]) набора угловой скорости «-0.3» град/сек. Поскольку требуемый знак рассогласования по угловой скорости совпадал со знаком возмущающего ускорения, то длительность компенсирующего включения от номинального значения была уменьшена подбором соответствующего Квр на 80%, и за счет действующего возмущающего ускорения (его значение 0.222 град/сек2) была набрана угловая скорость ωдус (omkD[2]). Подтверждением этого факта является отсутствие приложения отрицательного управляющего воздействия вокруг центра масс µop (tok[2]) при наборе угловой скорости разворота (см. фиг.4, Т≈250 секунда). Для поддержания требуемого значения угловой скорости также прикладывается управляющие воздействия только знака, противоположного возмущающему ускорению. Для гашения угловой скорости вращения и набора угловой скорости противоположного знака - «0.1» град/сек в условиях действия возмущающего ускорения того же знака (см. фиг.4 Т≈360 секунда) длительность компенсирующего включения была увеличена в соответствии с формулой 17.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОДДЕРЖАНИИ ОРИЕНТАЦИИ | 2008 |
|
RU2376215C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270789C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС ПРИ ПОДДЕРЖАНИИ ОРИЕНТАЦИИ | 2009 |
|
RU2412872C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270790C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО КОРАБЛЯ ПРИ ПРИЧАЛИВАНИИ | 2011 |
|
RU2482033C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ | 1998 |
|
RU2158951C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144691C1 |
| Способ регулирования скорости сближения сервисного и обслуживаемого космических аппаратов при их стыковке | 2019 |
|
RU2742132C1 |



Изобретение относится к управлению космическим аппаратом (КА), в частности к управлению положением линии визирования при сближении и причаливании КА. Способ включает определение угла рассогласования и угловой скорости КА вокруг центра масс. При этом к КА прикладывают управляющие и тестовые воздействия. По знаку приращения угловой скорости при тестовом воздействии в канале управления движением центра масс КА определяют знак возмущающего ускорения. Корректируют сигнал указанной угловой скорости по величинам и длительностям действия управляющего и возмущающего ускорений с учетом их знаков. Сравнивают значения угла ухода, определяемого по скорректированной угловой скорости, и самой этой скорости - с порогами срабатывания. Если данная угловая скорость меньше порога срабатывания, то прикладывают к КА компенсирующее воздействие вокруг центра масс. В процессе стабилизации уточняется значение действующего возмущающего ускорения и отношение величины возмущающего ускорения к управляющему вокруг центра масс. Этим обеспечивается независимость параметров управления от ошибок начальных оценок возмущающего и управляющего ускорений. Техническим результатом изобретения является уменьшение амплитуды колебаний угловой скорости и длительности переходного процесса, а в установившемся режиме - обеспечение малых отклонений угловой скорости от номинального значения и рассогласования по углу, не превышающего порогового значения. 4 ил.
Способ управления движением космического аппарата вокруг центра масс для поддержании ориентации при действии возмущающего ускорения, включающий определение угла рассогласования и угловой скорости вокруг центра масс, приложение тестового воздействия заданной длительности в заданном канале управления движением центра масс для определения величины возмущающего ускорения по отношению приращения угловой скорости за промежуток времени внутри заданной длительности тестового воздействия к длительности этого промежутка, определение коэффициента пропорциональности К0 по отношению модуля определенного возмущающего ускорения к модулю управляющего ускорения вокруг центра масс, определение длительности приложения компенсирующего воздействия вокруг центра масс по длительности приложения управляющего воздействия по центру масс с учетом коэффициента пропорциональности, отличающийся тем, что корректируют сигнал угловой скорости вокруг центра масс по величинам и длительностям действия управляющего и возмущающего ускорений с учетом их знаков, сравнивают значения угла ухода, определяемого по скорректированной угловой скорости, и скорректированной угловой скорости с заданными порогами срабатывания, определяют знак возмущающего ускорения по знаку приращения угловой скорости при тестовом воздействии, производят изменение величины регулировочного коэффициента Кр, причем при одинаковых знаках возмущающего ускорения и угла ухода значение регулировочного коэффициента Кр больше единицы, а при разных знаках - меньше единицы, при каждом обнулении угла рассогласования запоминают значение регулировочного коэффициента Кр зап=Кр, а при очередном определении угла рассогласования запомненное значение регулировочного коэффициента Кр зап принимают за начальное Кр=Кр зап и корректируют оценку возмущающего ускорения и коэффициента пропорциональности по величине регулировочного коэффициента, длительность приложения компенсирующего воздействия вокруг центра масс вычисляют по длительности приложения управляющего воздействия к центру масс с учетом коэффициентов пропорциональности К0, регулировочного Кр и экспериментально установленного Kj экс, величину которого определяют по величинам скорректированной угловой скорости и угла ухода, их запомненных значений, а также с учетом знаков возмущающего ускорения и скорректированной угловой скорости и знаков запомненной и текущей скорректированной угловой скорости, при величине скорректированной угловой скорости, меньшей заданного порога срабатывания, производят приложение компенсирующего воздействия вокруг центра масс, а при одинаковых знаках скорректированной угловой скорости и возмущающего ускорения дополнительно вычисляют углы рассогласования и ухода, запоминают начальные значения угла ухода и скорректированной угловой скорости для определения величины экспериментально установленного коэффициента Kj экс, знак приложения управляющего воздействия противоположен знаку возмущающего ускорения, при величине скорректированной угловой скорости, большей заданного порога срабатывания, производят приложение управляющего воздействия вокруг центра масс, суммарная длительность которого состоит из длительности, определенной по отношению скорректированной угловой скорости к управляющему ускорению вокруг центра масс, и длительности приложения компенсирующего воздействия, а при одинаковых знаках скорректированной угловой скорости и возмущающего ускорения дополнительно обнуляют и вновь определяют углы рассогласования и ухода, запоминают их начальные значения и начальное значение скорректированной угловой скорости, знак приложения управляющего воздействия противоположен знаку возмущающего ускорения, после чего определение регулировочного коэффициента Кр производят только при одинаковых знаках запомненного и текущего значений углов рассогласования, причем при скорректированной угловой скорости, меньшей порога срабатывания, производят приложение компенсирующего воздействия вокруг центра масс, а при скорректированной угловой скорости, большей порога срабатывания, производят приложение управляющего воздействия вокруг центра масс, суммарная длительность которого состоит из длительности, определенной по отношению скорректированной угловой скорости к управляющему ускорению вокруг центра, и длительности компенсирующего воздействия, знак приложения управляющего воздействия противоположен знаку возмущающего ускорения, для изменения и поддержания заданного значения угловой скорости вокруг центра масс вычисляют разность между требуемым и текущим значениями угловой скорости, при величине указанной разности, большей заданного порога срабатывания, и разных знаках указанной разности и возмущающего ускорения производят приложение управляющего воздействия, суммарную длительность которого определяют по длительности, вычисляемой по отношению указанной разности к управляющему ускорению вокруг центра масс, и длительности компенсирующего воздействия, определенного с учетом запомненного значения регулировочного коэффициента Kp зап, коэффициента пропорциональности К0 и экспериментально установленного коэффициента Kj экс, значение которого определяют по величине указанной разности, а при одинаковых знаках указанной разности и возмущающего ускорения производят приложение компенсирующего воздействия только при величине динамической ошибки, определяемой величиной возмущающего ускорения и запаздыванием в сигнале угловой скорости, большей заданного порога срабатывания по угловой скорости, при этом длительность компенсирующего воздействия, определенную с использованием запомненного значения регулировочного коэффициента Кр зап и коэффициента пропорциональности К0, уменьшают введением коэффициента Квр так, чтобы указанная динамическая ошибка была меньше заданного порога срабатывания, при указанной разности, меньшей заданного порога срабатывания по угловой скорости, производят приложение только компенсирующего воздействия, длительность которого определяют с учетом запомненного значения регулировочного коэффициента Kp зап и коэффициента пропорциональности Ко при разных знаках указанной разности и возмущающего ускорения, а при одинаковых знаках длительность компенсирующего включения определяют с учетом регулировочного коэффициента Kp зап, коэффициента пропорциональности К0 и экспериментально устанавливаемого коэффициента Kj экс, значение которого уменьшает длительность компенсирующего включения на величину, определяемую по указанной разности и знакам этой разности и возмущающего ускорения, причем знак приложения управляющего воздействия противоположен знаку возмущающего ускорения.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270789C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178761C1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178760C1 |
| ИНСТРУМЕНТ ДЛЯ ПРЕССОВАНИЯ ТРУБ | 2002 |
|
RU2236316C2 |

