Изобретение относится к космической технике и может быть использовано для поддержания ориентации космического аппарата (КА) при действии возмущающего момента, например, от включения исполнительных органов (ИО) при сближении и причаливании.
Известен способ управления КА (патент RU 2144692 от 17.08.98), включающий определение угла рассогласования и угловой скорости, в котором при поддержании ориентации используется раздельный анализ значений угла и угловой скорости относительно заданных пороговых значений.
При превышении углом рассогласования заданного порогового значения вычисляется требуемое значение угловой скорости по разности между текущим значением угла и заданным порогом. Требуемое значение угловой скорости суммируется с ее текущим значением, а затем определяется длительность приложения управляющего воздействия по отношению этой суммы к расчетному управляющему ускорению. Приложение управляющего воздействия прекращается при смене знака приращения угла на противоположный.
Если при величине угла меньше порога срабатывания значение угловой скорости превысит заданный порог по скорости, этот факт принимается за появление возмущающего момента, а потому производится перестройка функционирования алгоритма. Для этого запоминается значение угла, при котором произошло превышение порога срабатывания по угловой скорости, и начинается вычисление разности между запомненным и текущим значениями угла. По вычисленной разности и коэффициенту демпфирования определяется требуемое значение угловой скорости для данного рассогласования. Это значение требуемой скорости суммируется (по модулю) с текущим значением угловой скорости, и по отношению этой суммы к номинальному значению управляющего ускорения определяется длительность приложения управляющего воздействия вокруг центра масс со знаком, противоположным знаку вычисленной разности углов. При смене знака вычисленной разности углов на противоположный алгоритм управления приводится к исходному состоянию - сбрасывается запомненное значение угла и возобновляется раздельное сравнение значений угла и угловой скорости с заданными пороговыми значениями.
Этот способ управления при наличии возмущающего момента обеспечивает среднее значение угловой скорости, меньшее заданного порогового значения, только в установившемся режиме. Перестройка алгоритма по факту превышения угловой скоростью порогового значения приводит к неизбежному скачку угловой скорости в начальной фазе, величина которого зависит от величины возмущающего ускорения и запаздывания в системе управления. При увеличении величины возмущающего ускорения и запаздывания амплитуда скачка угловой скорости увеличивается и, неизбежно, увеличивается длительность переходного процесса до установившегося режима, при котором среднее значение угловой скорости меньше заданного порогового значения.
Известен способ управления КА, выбранный в качестве прототипа (патент 2270789 от 27.11.2003.), включающий определение угла рассогласования и угловой скорости, в котором при поддержании ориентированного положения формируется управляющая функции ξ
ξ=φ+k·ω,
где φ - угол рассогласования,
ω - угловая скорость,
k - коэффициент демпфирования.
При превышении ξ заданного порогового значения производится приложение управляющего воздействия вокруг центра масс, длительность которого пропорциональна величине ξ. Приложение управляющего воздействия прекращается при величине ξ, меньшей заданного порогового значения.
Для повышения качества переходного процесса при воздействии на КА возмущающего момента от включения ИО, управляющих движением центра масс, введено приложение компенсирующих управляющих воздействий вокруг центра масс одновременно с появлением возмущающего момента. Предварительно производят заданной длительности тестовое воздействие в заданном канале управления движением центра масс и определяют приращение угловой скорости за промежуток времени внутри заданной длительности тестового воздействия. По отношению приращения угловой скорости к длительности этого промежутка определяют величину возмущающего ускорения. Затем определяют коэффициент пропорциональности по отношению определенного возмущающего ускорения к расчетному управляющему ускорению вокруг центра масс.
Затем определяют длительность компенсирующего управляющего воздействия вокруг центра масс, которая пропорциональна длительности приложения управляющих воздействий по центру масс с учетом коэффициента пропорциональности. При регулировании по угловым координатам и наличия управляющих воздействий по центру масс длительность управляющего воздействия вокруг центра масс увеличивается на величину, необходимую для компенсации возмущающего ускорения.
Этот способ управления уменьшает амплитуду начального скачка угловой скорости при появлении возмущающего момента и, как следствие, уменьшает время переходного процесса к установившемуся режиму. Тем не менее, в условиях действующих ускорений вокруг центра масс (возмущающего и управляющего) увеличивается влияние динамической ошибки в сигнале угловой скорости на процесс стабилизации, приводящее к увеличению амплитуды колебаний по угловой скорости.
В этом способе управления при превышении управляющей функции ξ заданного порогового значения знак управляющего воздействия задается противоположным знаку управляющей функции. Вследствие этого, а также из-за ошибок измерения угловой скорости, возможных ошибок в оценке возмущающего ускорения и знания управляющего, знак управляющего воздействия вокруг центра масс может быть не в противофазе с возмущающим, а в фазе с ним. Это приводит к увеличенным по амплитуде колебаниям угловой скорости, значительно превышающим заданное пороговое значение.
Техническим результатом предлагаемого решения является повышение качества переходного процесса при действии на КА возмущающего момента, а именно, уменьшение амплитуды колебаний угловой скорости и длительности переходного процесса до установившегося режима.
Технический результат достигается тем, что в способе управления движением космического аппарата при поддержании ориентации, включающем определение угла и угловой скорости рассогласования, приложение управляющего воздействия вокруг центра масс, приложение заданной длительности тестового воздействия в заданном канале управления движением центра масс для определения величины возмущающего ускорения по отношению приращения угловой скорости за промежуток времени внутри заданной длительности тестового включения к длительности этого промежутка, затем определение коэффициента пропорциональности как отношение модуля вычисленного возмущающего ускорения к номинальному управляющему ускорению вокруг центра масс, в отличие от прототипа определяют знак возмущающего ускорения при тестовом включении по знакам приращения угловой скорости и тестового включения, определяют поправочный коэффициент, учитывающий возможное отклонение управляющих ускорений движениями центра масс и вокруг центра масс от номинальных значений, и корректируют сигнал угловой скорости с учетом величин и знаков возмущающего и управляющего ускорений и длительности действия каждого из них, при превышении углом заданного порогового значения между приложениями управляющих воздействий в канале управления движением центра масс определяют требуемое значение угловой скорости как отношение разности между величиной угла рассогласования и заданным пороговым значением по углу к коэффициенту демпфирования, затем производят приложение управляющего воздействия вокруг центра масс, длительность которого определяют как отношение текущей величины угловой скорости и ее требуемого значения к величине управляющего ускорения вокруг центра масс, со знаком управляющего воздействия, противоположным знаку угла рассогласования, и также между приложениями управляющих воздействий в канале управления движением центра масс производят приложение управляющего воздействия вокруг центра масс, когда угловая скорость больше заданного порогового значения, длительностью, определяемой по отношению величины угловой скорости к величине управляющего ускорения вокруг центра масс, со знаком, противоположным знаку угловой скорости вокруг центра масс, производят приложение управляющего воздействия вокруг центра масс при каждом приложении управляющего воздействия в канале управления движением центра масс и при угле и угловой скорости, меньших заданных пороговых значений, или при превышении углом рассогласования заданного порогового значения, а угловой скорости, меньшей заданного порогового значения, на время, определяемое по длительности приложения управляющего воздействия в канале управления движением центра масс с учетом коэффициента пропорциональности, поправочного коэффициента и экспериментально установленного коэффициента при разных знаках угловой скорости и возмущающего ускорения, а при одинаковых знаках угловой скорости и возмущающего ускорения с учетом коэффициента пропорциональности и поправочного коэффициента, знак управляющего воздействия при этом противоположен знаку возмущающего ускорения, а также при приложении управляющего воздействия в канале управления движением центра масс и превышении угловой скоростью заданного порогового значения определяют требуемое значение угловой скорости как отношение разности между текущим значением угла и значением угла, запомненного в момент превышения угловой скоростью заданного порогового значения к коэффициенту демпфирования, затем производят приложение управляющего воздействия вокруг центра масс длительностью, равной сумме длительности, определенной по отношению текущего и требуемого значений угловой скорости, отнесенных к расчетному значению управляющего ускорения, и длительности, определяемой по длительности приложения управляющего воздействия в канале управления движением центра масс с учетом коэффициента пропорциональности и поправочного коэффициента, знак управляющего воздействия противоположен знаку возмущающего ускорения.
Сущность изобретения поясняется на чертежами.
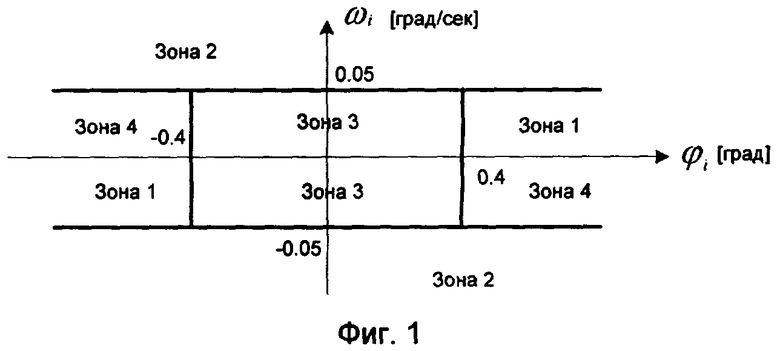
На фиг.1 указаны зоны приложения управляющих воздействий при поддержании ориентации.
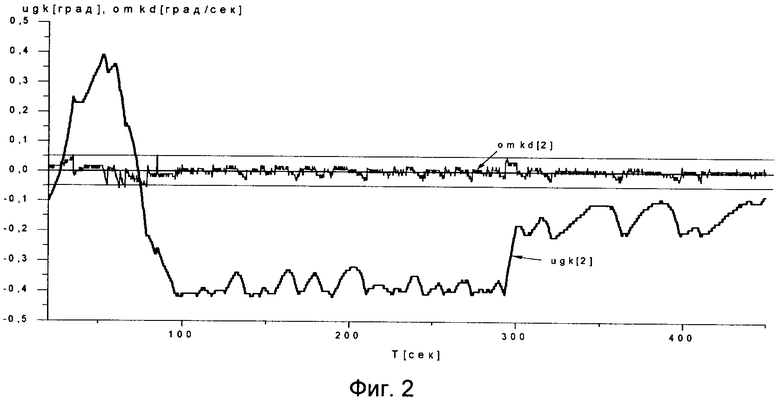
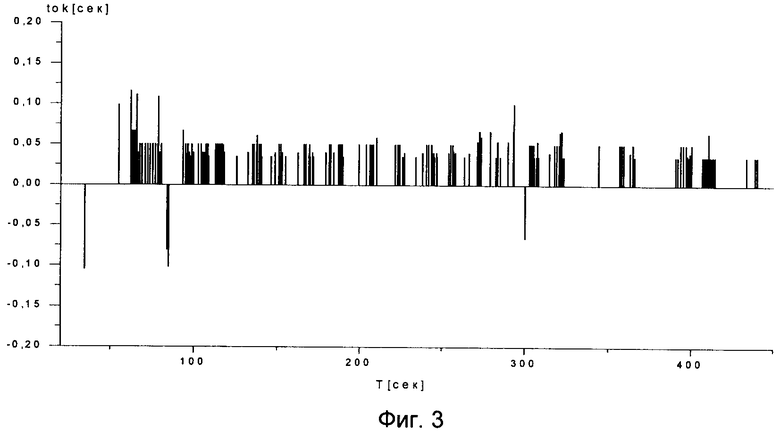
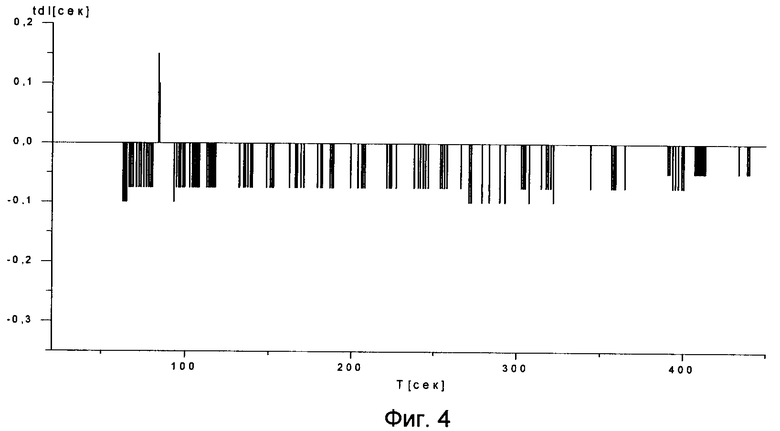
На фиг.2-4 приведены переходные процессы на участке автоматического причаливания при величине возмущающего ускорения ≈0,4 град/с2:
на фиг.2 - изменение угла ugk [2] и угловой скорости omkd [2],
на фиг.3 - длительности приложения управляющих воздействий вокруг центра масс tok [2],
на фиг.4 - длительности приложения управляющих воздействий по центру масс tdl [2].
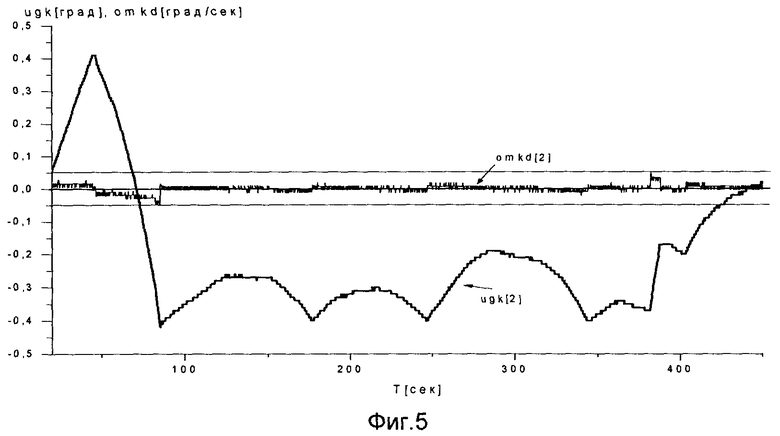
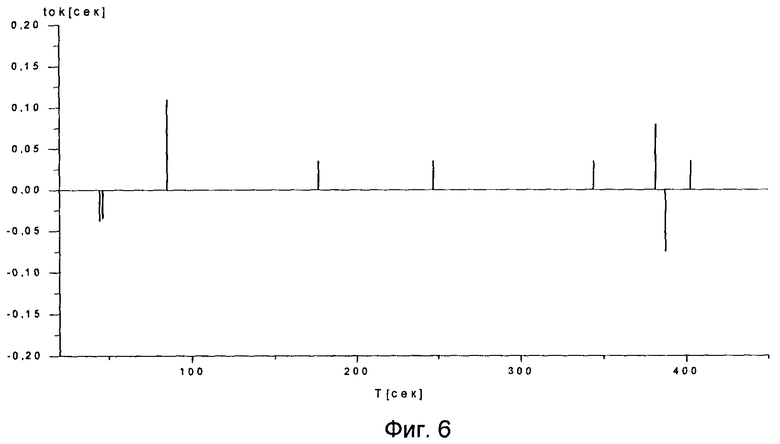
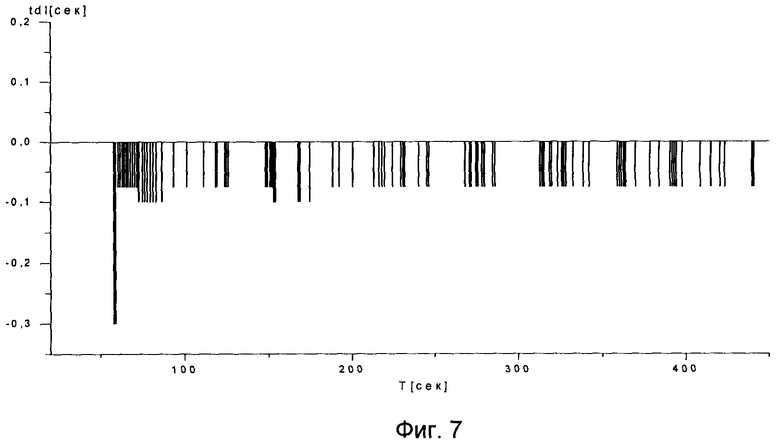
На фиг 5-7 - переходные процессы при величине возмущающего ускорения ≈0.01 град/с2:
на фиг.5 - изменение угла ugk [2] и угловой скорости omkd [2],
на фиг.6 - длительности приложения управляющих воздействий вокруг центра масс tok [2],
на фиг.7 - длительности приложения управляющих воздействий по центру масс tdl [2].
Управляющее ускорение вокруг центра масс во всех случаях одинаково и составляет ≈0.5 град/с2.
Оценка величины возмущающего ускорения и его знака при тестовом включении ИО, управляющих движением центра масс, позволяет уточнить его расчетное значение и знак, которые могут измениться в полете от смещения центра масс (например, от расхода рабочего тела). Знание величины и знака возмущающего ускорения позволяет вносить поправку в сигнал датчика угловой скорости и вычислять его по формуле
Ω=ωдус+tцм·µцм+topω·µор ,
где Q - суммарный сигнал угловой скорости,
ωдус - сигнал датчика угловой скорости,
tцм - длительность приложения управляющего воздействия по центру масс,
µцм - оценка возмущающего ускорения,
top - длительность приложения управляющего воздействия вокруг центра масс,
µop - расчетное значение управляющего ускорения вокруг центра масс.
Использование Ω в способе управления снижает величину динамической ошибки из-за запаздывания в сигнале датчика угловой скорости, запаздывания в системе управления, и, как следствие, уменьшает амплитуду колебаний по угловой скорости в начальной фазе процесса стабилизации, а потому и длительность переходного процесса до установившегося режима.
Для уменьшения вероятности перерегулирования от компенсирующего включения при определении его длительности вводится поправочный коэффициент (<1), которым учитывается возможный разброс расчетного управляющего ускорения вокруг центра масс (от изменения момента инерции, изменения тяги исполнительных органов от номинального значения). В тех случаях управления, когда возмущающее ускорение используется для регулирования угловой скорости, для большего ослабления компенсирующего включения вводится коэффициент, названный экспериментальным (<1). Его величина (0.5-0.8) определена моделированием процесса причаливания так, чтобы гарантированно компенсирующее включение было меньше действия возмущающего, и при этом сохранялись выдвинутые требования по качеству переходного процесса. Конкретное значение из указанного диапазона задается в зависимости от величины угловой скорости вокруг центра масс.
Использование раздельного анализа угла и угловой скорости при определении моментов приложения управляющих воздействий позволяет избежать, по сравнению с прототипом, затянутого переходного процесса до установившегося режима, как при отсутствии возмущающего момента, так и при его действии. Раздельный анализ угла и угловой скорости обеспечивает одно и то же пороговое значение по угловой скорости (не зависящее от величины угла, как в прототипе), а также позволяет изменять структуру алгоритма, что, в свою очередь, обеспечивает возможность варьирования коэффициентами управления для обеспечения требуемого качества регулирования в зависимости от решаемой задачи, в том числе и длительностью переходных процессов.
Функционирование способа управления разделяется на работу при отсутствии приложения управляющих воздействий по центру масс (работа при отсутствии возмущающего ускорения) и при их приложении.
При отсутствии возмущающего ускорения, когда угол рассогласования превышает заданное порогового значения, а угловая скорость меньше заданного порогового значения (зона 1 на фиг.1), вычисляется требуемое значение угловой скорости как отношение разности между величиной угла рассогласования и заданным пороговым значением к коэффициенту демпфирования. Затем производят приложение управляющего воздействия вокруг центра масс, длительность которого определяется по текущей величине угловой скорости вокруг центра масс и ее требуемому значению, отнесенных к величине управляющего ускорения вокруг центра масс. Знак управляющего воздействия противоположен знаку угла рассогласования. Приложение управляющих воздействий прекращается при изменении знака приращения угла на противоположный (зона 2 на фиг.1).
Если угловая скорость превысит заданного пороговое значение при отсутствии возмущающего ускорения (зона 2 на фиг.1), то производится приложение управляющего воздействия вокруг центра масс, длительность которого определяется по отношению величины угловой скорости к величине управляющего ускорения вокруг центра масс. Знак управляющего воздействия противоположен знаку угловой скорости. Приложение управляющих воздействий прекращается, когда угловая скорость станет меньше заданного порогового значения.
Для поддержания ориентированного положения при приложении управляющих воздействий по центру масс используются следующие приемы:
- при угле и угловой скорости, меньших заданных пороговых значений (зоны 3 на фиг.1), и разных знаках угловой скорости и возмущающего ускорения длительность компенсирующего включения определяется по длительности приложения управляющего воздействия по центру масс, которая уменьшается коэффициентами пропорциональности, поправочного и экспериментального. Большее уменьшение длительности компенсирующего включения делается для того, чтобы за счет возмущающего ускорения уменьшить текущее значение угловой скорости, вплоть до изменения ее знака. При одинаковых знаках угловой скорости и возмущающего ускорения длительность компенсирующего включения задается по длительности приложения управляющего воздействия по центру масс с использованием только коэффициентов пропорциональности и поправочного. Это делается для того, чтобы в большей степени препятствовать возможному увеличению угловой скорости. Знак приложения управляющего воздействия вокруг центра масс противоположен знаку возмущающего ускорения,
- аналогично изложенному выше ведется управление и при угле, большем заданного порогового значения, а угловой скорости, меньшей заданного порогового значения (зоны 1 и 4 на фиг.1). При разных знаках угловой скорости и возмущающего ускорения длительность компенсирующего включения определяется по длительности приложения управляющего воздействия по центру масс, которая уменьшается коэффициентами пропорциональности, поправочного и экспериментального. При одинаковых знаках угловой скорости и возмущающего ускорения длительность компенсирующего включения задается по длительности приложения управляющего воздействия по центру масс с использованием только коэффициентов пропорциональности и поправочного. Смена знака угловой скорости от действия возмущающего ускорения при большем ослаблении компенсирующего включения и возможная обратная смена знака угловой скорости при его меньшем ослаблении - воспрепятствуют увеличению рассогласования по углу, что заменяет регулирование по фазовым координатам на время действия возмущающего ускорения. Знак приложения управляющего воздействия вокруг центра масс противоположен знаку возмущающего ускорения,
- при превышении угловой скоростью порогового значения вне зависимости от величины угла рассогласования (зона 2 на фиг.1), запоминается значение угла, при котором произошло превышение порогового значения по угловой скорости. Затем производится вычисление разности между запомненным значением угла и текущим значением. По вычисленной разности, отнесенной к коэффициенту демпфирования, вычисляется требуемое значение угловой скорости, которое суммируется с ее текущим значением. По сумме значений этих скоростей, отнесенной к расчетному значению управляющего ускорения, определяется длительность приложения управляющего воздействия вокруг центра масс. Это длительность увеличивается на время, определяемое по длительности приложения управляющего воздействия по центру масс с учетом коэффициентов пропорциональности и поправочного. Знак приложения управляющего воздействия вокруг центра масс противоположен знаку возмущающего ускорения. При прекращении действия возмущающего ускорения восстанавливается режим поддержания ориентированного положения по углу и угловой скорости.
Моделирование процесса автоматического причаливания, выполненное с применением предлагаемого способа управления движением вокруг центра масс, показало, что при возмущающем ускорении ≈0.01 (см. фиг.5, 6, 7) и ≈0.4 град/с2 (см. фиг.2, 3, 4) и управляющем ускорении вокруг центра масс ≈ 0.5 град/с2 угловая скорость вокруг центра масс (параметр omkd [2]) не превышает заданного порогового значения ±0.05 град/с. Процесс причаливания выполнялся при ориентации пассивного корабля в орбитальной системе координат.
Из сравнения приведенных переходных процессов следует, что характер приложения управляющих воздействий в канале управления движением центра масс (параметр tdl [2] на фиг.4 и 7) практически одинаков, несмотря на интенсивную работу ИО вокруг центра масс при возмущающем ускорении 0.4 град/с2 (параметр tok [2] на фиг.3) и редкие включения управляющих воздействий при возмущающем ускорении 0.01 град/с2. Это свидетельствует о том, что динамика движения вокруг центра масс КА практически не оказывает влияния на управление движением его центра масс, что и является смыслом предлагаемого технического решения - сделать процесс стабилизации инвариантным к соотношению величин управляющего и возмущающего ускорений, а каналы управления движением центра масс и вокруг центра масс - независимыми. Вследствие этого, предлагаемое техническое решение может быть использовано и на КА сложной конфигурации, например, типа «Клипер», на которых тяги исполнительных органов не может проходить через его центра масс, что приводит к большим возмущающим ускорениям, близким к управляющим.
Анализ переходных процессов по угловой скорости (см. фиг.2 и 5 параметр omkd [2]) показывает, что угловая скорость не превышает заданного порога срабатывания (±0.05 град/с) как при возмущающем ускорении 0.01 град/с2, так и при 0.4 град/с2 при неизменном управляющем 0.5 град/с2. Это свойство особенно важно для ручного управления сближением и причаливанием, которое более критично к качеству поддержания ориентации и, особенно, при действии возмущающего момента. Сохранение одинаковых значений угловой скорости при наличии и отсутствии возмущающего момента является необходимым условием для качественной визуальной оценки параметров относительного движения центров масс и их регулирования.
Предлагаемое техническое решение может быть реализовано известными техническими устройствами. Угловая скорость КА измеряться, например, гироскопическим датчиком угловой скорости. Угол рассогласования - интегрированием (суммированием) сигнала датчика угловых скоростей. Исполнительные органы - реактивные двигатели, допускающие импульсную работу, аналогичные применяемым на кораблях «Союз», «Прогресс». Алгоритм управления состоит из блоков, выполняющих суммирование, вычитание, умножение на постоянные коэффициенты и переключения при достижении значений параметров заданных порогов срабатывания, что может быть реализовано, в том числе и известными аналоговыми вычислительными устройствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС ДЛЯ ПОДДЕРЖАНИЯ ОРИЕНТАЦИИ ПРИ ДЕЙСТВИИ ВОЗМУЩАЮЩЕГО УСКОРЕНИЯ | 2009 |
|
RU2410296C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270789C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС ПРИ ПОДДЕРЖАНИИ ОРИЕНТАЦИИ | 2009 |
|
RU2412872C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270790C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО КОРАБЛЯ ПРИ ПРИЧАЛИВАНИИ | 2011 |
|
RU2482033C1 |
| Способ регулирования скорости сближения сервисного и обслуживаемого космических аппаратов при их стыковке | 2019 |
|
RU2742132C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144691C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ | 1998 |
|
RU2158951C2 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2787522C1 |
Изобретение относится к управлению ориентацией космического аппарата (КА) при действии возмущающего момента, например, от включения исполнительных органов при сближении и причаливании. Способ включает определение угла и угловой скорости рассогласования, а также приложение управляющего воздействия вокруг центра масс КА. Для определения возмущающего ускорения прикладывают тестовое воздействие заданной длительности в заданном канале управления. При тестовом включении определяют знак возмущающего ускорения, учитывая возможное отклонение управляющих ускорений от номинальных. Корректируют сигнал угловой скорости с учетом величин и знаков возмущающего и управляющего ускорений и длительности действия каждого из них. В период между приложениями управляющих воздействий в канале управления движением центра масс, когда угол и угловая скорость больше заданных пороговых значений, определяют и прикладывают управляющие воздействия определенной длительности вокруг центра масс. Когда угловая скорость меньше заданного порогового значения, то управляющие воздействия вокруг центра масс и в канале управления движением центра масс прикладывают одновременно. Их длительность определяют на базе предварительных измерений характеристик возмущающих и управляющих воздействий. Во время приложения управляющего воздействия в канале управления движением центра масс, когда угловая скорость превышает пороговое значение, определяют требуемое значение угловой скорости. Это значение находят как отношение разности между текущим значением угла и его значением, запомненным в момент указанного превышения, к коэффициенту демпфирования. Затем прикладывают управляющее воздействие вокруг центра масс с длительностью, определенной также на базе упомянутых предварительных измерений. Техническим результатом изобретения является уменьшение амплитуды колебаний угловой скорости и длительности переходного процесса при действии на КА возмущающего момента. 7 ил.
Способ управления движением космического аппарата при поддержании ориентации, включающий определение угла и угловой скорости рассогласования, приложение управляющего воздействия вокруг центра масс аппарата, приложение заданной длительности тестового воздействия в заданном канале управления движением центра масс для вычисления величины возмущающего ускорения как отношения приращения угловой скорости за промежуток времени внутри заданной длительности тестового включения к длительности этого промежутка, последующее определение коэффициента пропорциональности как отношения модуля вычисленного возмущающего ускорения к номинальному управляющему ускорению вокруг центра масс аппарата, отличающийся тем, что определяют знак указанного возмущающего ускорения при тестовом включении по знакам приращения угловой скорости и тестового включения, определяют поправочный коэффициент, учитывающий возможное отклонение ускорений, управляющих движениями центра масс аппарата и вокруг центра масс, от номинальных значений, и корректируют сигнал угловой скорости с учетом величин и знаков возмущающего и управляющего ускорений, а также длительности действия каждого из них, при превышении указанным углом заданного порогового значения между приложениями управляющих воздействий в канале управления движением центра масс определяют требуемое значение угловой скорости как отношение разности между величиной угла рассогласования и заданным пороговым значением по углу к коэффициенту демпфирования, затем производят приложение управляющего воздействия вокруг центра масс, длительность которого определяют как отношение текущей величины угловой скорости и ее требуемого значения к величине управляющего ускорения вокруг центра масс, со знаком управляющего воздействия, противоположным знаку угла рассогласования, и также между приложениями управляющих воздействий в канале управления движением центра масс производят приложение управляющего воздействия вокруг центра масс, когда угловая скорость больше заданного порогового значения, длительностью, определяемой как отношение величины угловой скорости к величине управляющего ускорения вокруг центра масс, со знаком, противоположным знаку угловой скорости аппарата вокруг центра масс, производят приложение управляющего воздействия вокруг центра масс при каждом приложении управляющего воздействия в канале управления движением центра масс и при угле и угловой скорости, меньших заданных пороговых значений, или при превышении углом рассогласования заданного порогового значения и при угловой скорости, меньшей заданного порогового значения - на время, определяемое по длительности приложения управляющего воздействия в канале управления движением центра масс с учетом указанных коэффициента пропорциональности, поправочного коэффициента и экспериментально установленного коэффициента при разных знаках угловой скорости и возмущающего ускорения, а при одинаковых знаках угловой скорости и возмущающего ускорения - с учетом коэффициента пропорциональности и поправочного коэффициента, при этом знак управляющего воздействия противоположен знаку возмущающего ускорения, а при приложении управляющего воздействия в канале управления движением центра масс и превышении угловой скоростью заданного порогового значения определяют требуемое значение угловой скорости как отношение разности между текущим значением угла и значением угла, запомненного в момент превышения угловой скоростью заданного порогового значения, к коэффициенту демпфирования, затем производят приложение управляющего воздействия вокруг центра масс длительностью, равной сумме длительности, определенной по отношению текущего и требуемого значений угловой скорости к расчетному значению управляющего ускорения, и длительности, определяемой по длительности приложения управляющего воздействия в канале управления движением центра масс с учетом указанных коэффициента пропорциональности и поправочного коэффициента, причем знак управляющего воздействия противоположен знаку возмущающего ускорения.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270789C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178761C1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178760C1 |
| ИНСТРУМЕНТ ДЛЯ ПРЕССОВАНИЯ ТРУБ | 2002 |
|
RU2236316C2 |

