Изобретение относится к виброакустическим измерениям и предназначено для определения координат зон излучения, диагностики источников и измерения их вкладов во внешнее акустическое поле движущегося объекта измерения.
Известен способ определения координат зон излучения дискретных составляющих акустического поля методом доплеровского сканирования, заключающийся в компенсации эффекта Доплера с использованием набора доплеровских кривых, рассчитанных относительно точек, расположенных по линейной длине объекта измерения, измерении энергетических спектров скорректированных сигналов в узкой полосе частот, содержащей исследуемую дискретную составляющую, и определении координаты зоны излучения по точке с наилучшей компенсацией частотного расширения дискретной составляющей [1].
Известны способы определения источников и измерения их вкладов в суммарный сигнал в широких полосах и на частотах дискретных составляющих взаимоспектральным и корреляционным анализом [2]. Однако известные способы не могут быть применены для поиска источников внешнего акустического поля движущегося объекта измерения, так как требуют для обработки синхронных сигналов.
Наиболее близким к предлагаемому изобретению является способ определения источников дискретных составляющих акустического поля движущегося объекта измерения, заключающийся в измерении и регистрации вибрационных сигналов механизмов и сигнала акустического поля, измерении узкополосных спектров исходных сигналов с целью определения совпадения частот дискретных составляющих исследуемых спектров [2].
Известно устройство для измерения и регистрации вибрационных и акустического сигналов объекта измерения [3].
Известно также устройство узкополосного спектрального анализа, применяемое для определения источников акустического поля движущегося объекта измерения по измеренным и зарегистрированным сигналам [4].
Известные способы и устройства позволяют определить координаты зон излучения, источники внешнего акустического поля объекта измерения, однако обладают низкой точностью, неоднозначностью результатов, не позволяют измерять вклады источников в акустическое поле при движении объекта измерения и их применение возможно лишь для дискретных спектральных составляющих.
Целью изобретения является повышение точности определения координат зон излучения, диагностики источников акустического поля движущегося объекта измерения и расширение функциональных возможностей путем измерения величины вкладов источников и снятия ограничений на спектральный состав исходных сигналов (наличие дискретных составляющих).
На движущемся объекте измеряют вибрационные сигналы механизмов, корпусных конструкций с вибродатчиков, установленных на объекте измерения и сигнал внешнего акустического поля с акустических приемников, расположенных по траектории его движения, полученные сигналы регистрируют на независимые накопители информации. В качестве накопителей могут быть применены различные аналоговые или цифровые устройства накопления, функциональные возможности которых позволяют восстановить зарегистрированные сигналы в аналоговом виде.
Поставленная цель достигается тем, что дополнительно на объекте измерения формируют синхросигнал несущей частоты Fнес, промодулированный кодами времени, и регистрируют его параллельно с вибрационными сигналами на накопитель информации, расположенный на объекте, одновременно синхросигнал преобразуют из электрической энергии в акустическую, излучают с объекта измерения в окружающую среду и принимают в сумме с акустическим сигналом объекта, синхросигнал и сигнал акустического поля объекта разделяют путем фильтрации. Одновременно формируют сигнал частоты коррекции, имеющий нестабильность не хуже 10E-6 и выбираемый из условия Fкор ≥ 2Fнес.
Сигнал акустического поля объекта измерения, синхросигнал и сигнал частоты коррекции регистрируют параллельно на накопитель информации, находящийся вне объекта измерения. Фиксируют точку нахождения излучателя синхросигнала на объекте измерения, а линейную длину объекта условно разбивают на ряд точек синхронизации.
По окончании движения объекта измерения временные характеристики вибрационных и акустического сигналов попарно приводят к единому масштабу времени относительно точек синхронизации и измеряют величину корреляционной связи засинхронизированных сигналов.
Синхронизация сигналов и измерение корреляционных связей осуществляются следующим образом.
Из зарегистрированных независимыми накопителями синхросигналов выделяются сигналы несущей частоты Fнес и кодовые посылки времени. Выбирается код времени, содержащийся на обоих накопителях и соответствующий началу измерений.
По выбранному коду времени производится синхронизация начала ввода вибрационного сигнала через буферную память в устройство измерения корреляционных связей (в дальнейшем коррелятор). При этом, применяя сигнал несущей частоты Fнес для дискретизации вибрационного сигнала, компенсируются его временные искажения, обусловленные девиацией накопителя информации.
Далее по предварительно выбранному коду времени производится синхронизация начала ввода акустического сигнала через буферную память в коррелятор. При этом, применяя сигнал частоты коррекции Fкор для дискретизации, компенсируются временные искажения акустического сигнала и сигнала несущей частоты Fнес, обусловленные девиацией соответствующего накопителя информации. Сигнал несущей частоты Fнес сдвигается относительно акустического сигнала на величину, учитывающую пространственное распределение выбранной точки синхронизации относительно точки расположения излучателя синхросигнала. Применяя сдвинутый сигнал несущей частоты Fнес для вторичной дискретизации акустического сигнала, компенсируются его частотные искажения, обусловленные эффектом Доплера, после чего акустический сигнал вводится в коррелятор.
Кроме того, начало ввода вибрационного или акустического сигнала в коррелятор производится с задержкой относительно начального кода времени, учитывающей также относительное расположение выбранной точки синхронизации и точки излучения синхросигнала.
Измеряют степень корреляционной связи засинхронизированных относительно выбранной точки синхронизации вибрационного и акустического сигналов через измерение функции корреляции, когерентности или следящим спектральным анализом. Результаты корреляционных измерений для интересующих дискретных спектральных составляющих или шумовых полос регистрируются.
Аналогично производится синхронизация и измерение для каждой точки синхронизации по длине объекта измерения.
Выбирается максимум корреляционной функции и соответствующая ему точка синхронизации, по которым выносят решение как по дискретным спектральным составляющим, так и в широких полосах частот о принадлежности измеренного механизма, корпусной конструкции к источникам акустического поля, величине его вклада и координате зоны излучения.
Поставленная цель достигается также тем, что в известное устройство для измерения и регистрации вибрационных и акустического сигналов объекта измерения [3] дополнительно введены последовательно соединенные датчик кодов времени, преобразователь параллельного кода в последовательный, формирователь синхросигнала, преобразователь электрической энергии в акустическую, а также полосовой фильтр, фильтр нижних частот и генератор частоты коррекции.
Поставленная цель достигается также тем, что в известное устройство для определения источников акустического поля движущегося объекта измерения [4] дополнительно введены блок выделения синхросигнала, первый формирователь импульсов дискретизации, последовательно соединенные демодулятор, преобразователь последовательного кода в параллельный, блок сравнения кодов, последовательно соединенные полосовой фильтр и второй формирователь импульсов дискретизации, последовательно соединенные первые двухканальные аналого-цифровой преобразователь, блок памяти, цифроаналоговый преобразователь, последовательно соединенные вторые двухканальные аналого-цифровой преобразователь, блок памяти, цифроаналоговый преобразователь, двухканальный коррелятор, в устройство включены также датчик кодов времени с управляющей шиной, блок управления сдвигом с шиной управления сдвигом, блок управления задержкой с шиной управления задержкой, второй, третий и четвертый переключатели.
Именно описываемая последовательность действий и устройств обеспечивают реализацию способа и тем самым достижение цели изобретения.
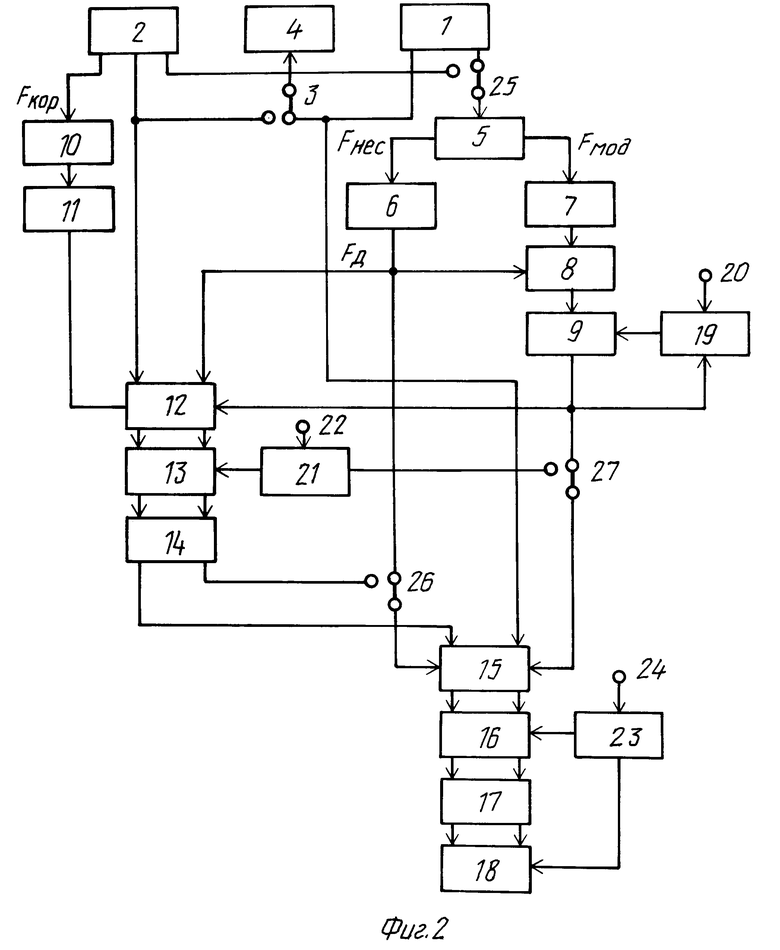
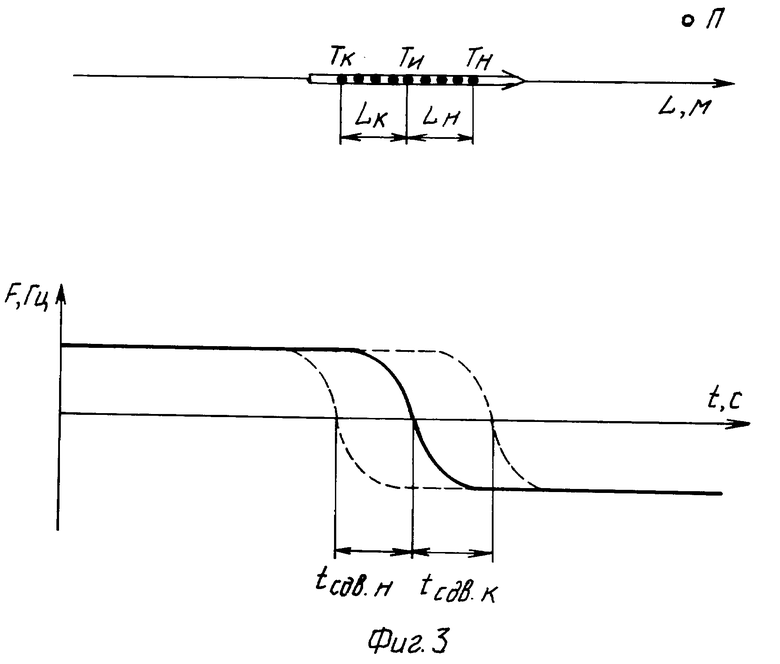
На фиг. 1 представлена структурная схема устройства для измерения и регистрации вибрационных и акустического сигналов объекта измерения, на фиг. 2 - структурная схема устройства для определения координат зон излучения, диагностики источников и измерения их вкладов в акустическое поле объекта измерения.
Устройство для измерения и регистрации вибрационных и акустического сигналов объекта измерения содержит первый и второй накопитель информации 1 и 2, группу вибродатчиков 3, подсоединенных через группу соответствующих предварительных усилителей 4 к входам первого накопителя информации 1, последовательно соединенные акустический приемник 5 и предварительный усилитель 6, кроме того, в устройство дополнительно включены последовательно соединенные датчик кодов времени 7, преобразователь параллельного кода в последовательный 8, формирователь синхросигнала 9, преобразователь электрической энергии в акустическую 10, а также полосовой фильтр 11, фильтр нижних частот 12 и генератор частоты коррекции 13, синхронизирующие входы преобразователя параллельного кода в последовательный 8 и формирователя синхросигнала 9 подключены к синхронизирующим выходам датчика кодов времени 7, выход формирователя синхросигнала 9 соединен с одним из входов первого накопителя информации 1 и входом преобразователя электрической энергии в акустическую 10, входы фильтров 11 и 12 соединены с выходом предварительного усилителя 6, а выходы фильтров 11, 12 и генератора 13 подсоединены к входам второго накопителя информации 2.
Устройство для определения координат зон излучения, диагностики источников и измерения их вкладов в акустическое поле объекта измерения содержит первый и второй накопители информации 1 и 2, информационные выходы которых, содержащие вибрационный и акустический сигналы, через первый переключатель 3 поочередно соединены с входом анализатора спектра 4, кроме того, в устройство дополнительно включены блок выделения синхросигнала 5, первый формирователь импульсов дискретизации 6, последовательно соединенные демодулятор 7, преобразователь последовательного кода в параллельный 8, блок сравнения кодов 9, последовательно соединенные полосовой фильтр 10 и второй формирователь импульсов дискретизации 11, последовательно соединенные первые двухканальные аналого-цифровой преобразователь 12, блок памяти 13, цифроаналоговый преобразователь 14, последовательно соединенные вторые двухканальные аналого-цифровой преобразователь 15, блок памяти 16, цифроаналоговый преобразователь 17, коррелятор 18, в устройство включены также датчик кодов времени 19 с управляющей шиной 20, блок управления сдвигом 21 с шиной управления сдвигом 22, блок управления задержкой 23 с шиной управления задержкой 24, второй, третий и четвертый переключатели 25, 26 и 27 соответственно, вход блока выделения синхросигнала 5 соединен через второй переключатель 25 с выходами синхросигналов накопителей 1 и 2, первый выход блока выделения синхросигнала 5, содержащий сигнал модуляционной частоты Fмод, несущей информацию о кодах времени, подключен через демодулятор 7, преобразователь последовательного кода в параллельный 8 к первому входу блока сравнения кодов 9, выход блока сравнения кодов 9 подключен к первому управляющему входу первого аналого-цифрового преобразователя 12 и к первому входу датчика кодов времени 19, второй вход которого подключен к управляющей шине 20, а выход - к второму входу блока сравнения кодов 9, второй выход блока выделения синхросигнала 5, содержащий сигнал несущей частоты Fнес, подключен через первый формирователь импульсов дискретизации 6 к синхронизирующему входу преобразователя последовательного кода в параллельный 8 и к первому входу на преобразование первого аналого-цифрового преобразователя 12, второй вход на преобразование первого аналого- цифрового преобразователя 12 соединен с выходом акустического сигнала второго накопителя 2, второй управляющий вход первого аналого-цифрового преобразователя 12 соединен через второй формирователь импульсов дискретизации 11 и полосовой фильтр 10 с выходом сигнала частоты коррекции Fкор второго накопителя информации 2, вход блока управления сдвигом 21 соединен с шиной управления сдвигом 22, первый выход подключен к управляющему входу первого блока памяти 13, первый управляющий вход второго аналого - цифрового преобразователя 15 подключен через четвертый переключатель 27 к выходу блока сравнения кодов 9 и к второму выходу блока управления сдвигом 21, второй управляющий вход подключен через третий переключатель 26 к выходу первого формирователя импульсов дискретизации 6 и к первому выходу, содержащему сигнал дискретизации Fд, первого цифроаналогового преобразователя 14, первый и второй входы на преобразование подключены соответственно к выходу вибрационного сигнала первого накопителя информации 1 и к второму выходу, содержащему скорректированный акустический сигнал, первого цифроаналогового преобразователя 14, вход блока управления задержкой 23 соединен с шиной управления задержкой 24, первый выход подключен к управляющему входу второго блока памяти 16, а второй выход подключен к управляющему входу коррелятора 18.
Рассмотрим реализацию способа. Выполняются измерения и регистрация вибрационных характеристик механизмов, корпусных конструкций и акустического поля объекта измерения с применением устройства для измерения и регистрации сигналов. Устройство работает следующим образом.
Вибрационные сигналы группы вибродатчиков 3, установленных на объекте измерения, усиливаются группой соответствующих предварительных усилителей 4 и регистрируются в накопителе информации 1. Датчик кодов времени 7 формирует параллельный код времени и импульсную последовательность с несущей частотой Fнес, лежащей выше дискретного спектра частот акустического поля объекта измерения. Параллельный временной код преобразуется синхронно с тактовыми импульсами в преобразователе 8 в последовательный, которым модулируется в формирователе синхросигнала 9 последовательность тактовых импульсов. Формирователем синхросигнала 9 формируется требуемая полоса частот синхросигнала, спектр которого содержит несущую частоту Fнес и модуляционную Fмод. Синхросигнал регистрируется параллельно с вибрационными сигналами первым накопителем информации 1 и через преобразователь электрической энергии в акустическую 10 излучается с движущегося объекта измерения в окружающую среду. Акустический сигнал объекта измерения в сумме с сихросигналом и помехами принимается акустическим приемником 5 и усиливается предварительным усилителем 6. Суммарный сигнал разделяется путем фильтрации синхросигнала полосовым фильтром 11 и акустического сигнала фильтром нижних частот 12. Полученные сигналы регистрируются параллельно с сигналом частоты коррекции генератора 13 вторым накопителем информации 2, находящимся вне объекта измерения.
Фиксируется точка нахождения излучателя синхросигнала на объекте измерения. После окончания режима движения объекта измерения накопители с зарегистрированными вибрационными и акустическим сигналами включаются в состав устройства для определения координат зон излучения, диагностики источников и измерения их вкладов в акустическое поле объекта измерения.
Зарегистрированные сигналы акустического поля с накопителя 2 и вибрационные сигналы с накопителя 1 через переключатель 3 подаются на вход частотного анализатора 4. Измеряют спектры сигналов и определяют частотные полосы и вибрационные сигналы, для которых должны быть измерены взаимные корреляционные связи с акустическим сигналом, с предварительным приведением временных функций сигналов к единому масштабу времени относительно точек, выбранных по линейной длине объекта измерения.
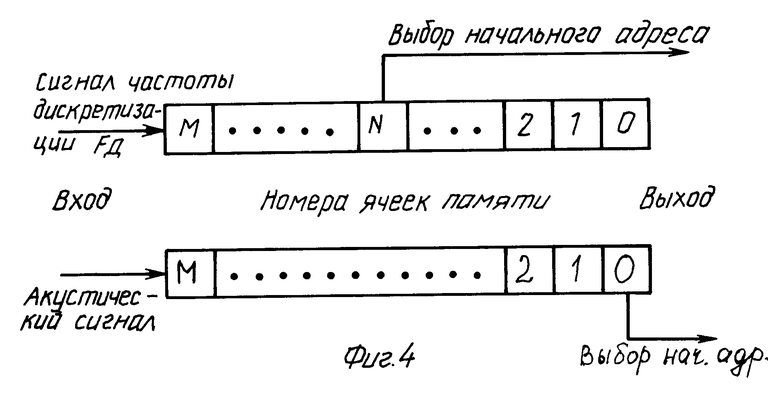
Один из вариантов выбора точек синхронизации с линейным шагом вдоль длины объекта измерения от начальной Tн до конечной Tк представлен на фиг. 3. Излучатель синхросигнала расположен в точке Tи.
С первого накопителя информации 1 вводят во второй блок памяти 16 вибрационный сигнал следующим образом. Синхросигнал с первого накопителя информации 1 через второй переключатель 25 подается на вход блока выделения синхросигнала 5, в котором выделяются сигнал несущей частоты Fнес и сигнал модуляционной частоты Fмод, содержащий информацию о кодах времени.
Сигнал несущей частоты Fнес преобразуется в первом формирователе импульсов дискретизации 6 в последовательность тактовых импульсов Fд, которая используется для синхронизации преобразователя последовательного кода в параллельный 8 и для внешней дискретизации через третий переключатель 26 вторым двухканальным аналого-цифровым преобразователем 15.
Сигнал модуляционной частоты Fмод преобразуется в демодуляторе 7, преобразователе последовательного кода в параллельный 8 в параллельный код времени, который подается на первый вход блока сравнения кодов 9, на второй вход которого через датчик кодов времени 19 подается по управляющей шине 20 предварительно выбранный код времени начала корреляционных измерений между сигналами. При совпадении кодов блок 9 вырабатывает импульс, который увеличивает содержимое датчика кодов времени 19 на единицу и запускает через четвертый переключатель 27 второй аналого-цифровой преобразователь 15 на преобразование вибрационного сигнала, подаваемого на его первый вход с выхода первого накопителя 1. Вибрационный сигнал преобразуется в цифровой вид и заносится в первый канал второго блока памяти 16.
Затем производится ввод в первый блок памяти 13 с переносом во второй блок памяти 16 акустического сигнала с второго накопителя 2. Сигнал частоты коррекции Fкор с второго накопителя 2 выделяется полосовым фильтром 10, преобразуется во втором формирователе импульсов дискретизации 11 в последовательность тактовых импульсов, которая используется для внешней дискретизации первым двухканальным аналого-цифровым преобразователем 12. Синхросигнал с второго накопителя 2 подается через второй переключатель 25 на вход блока выделения синхросигнала 5. Сигнал несущей частоты Fнес, выделенный в блоке 5, преобразованный в первом формирователе импульсов дискретизации 6 в последовательность тактовых импульсов дискретизации Fд и используемый для синхронизации преобразователя последовательного кода в параллельный 8, подается на первый вход на преобразование первого аналого-цифрового преобразователя 12. Сигнал модуляционной частоты Fмод, выделенный в блоке выделения синхросигнала 5, преобразованный в демодуляторе 7, преобразователе последовательного кода в параллельный 8 в параллельный код времени, сравнивается в блоке сравнения кодов 9 с предварительно выбранным кодом времени начала корреляционных измерений между сигналами, установленным через датчик кодов времени 19 по управляющей шине 20. При совпадении кодов блок 9 вырабатывает импульс, который увеличивает содержимое датчика кодов времени 19 на единицу и запускает первый аналого-цифровой преобразователь 12 на преобразование. Сигнал дискретизации Fд по первому входу и акустический сигнал с второго накопителя 2 по второму входу первым аналого-цифровым преобразователем 12 преобразуются в цифровой вид и заносятся по соответствующим каналам в первый блок памяти 13.
В первом блоке памяти 13 цифровой сигнал дискретизации Fд сдвигается относительно акустического сигнала на величину, учитывающую сдвиг функции доплеровского смещения частоты, обусловленный распределением точки синхронизации относительно точки излучения синхросигнала. Начальная синхронизируемая точка Tн, находящаяся на расстоянии Lн от точки излучения синхросигнала Tи (см. фиг. 3), пройдет минимальное расстояние относительно акустического приемника П раньше, чем точка излучения синхросигнала Tи, что соответствует сдвигу функции доплеровского смещения частоты tсдв.н, вычисляемого
где V - скорость движения объекта измерения.
Следовательно, сигнал дискретизации Fд должен быть сдвинут относительно акустического сигнала на величину tсдв.н.
Сдвиг сигналов осуществляется путем установки начальных адресов вывода цифровых сигналов в блоке памяти 13 блоком управления сдвигом 21 по шине управления сдвигом 22. Для начальной синхронизируемой точки Tн вывод акустического сигнала производится с нулевой ячейки памяти (см. фиг. 4), а сигнала дискретизации Fд с N - ячейки памяти, рассчитываемой по формуле
где  - период дискретизации первого аналого-цифрового преобразователя 12;
- период дискретизации первого аналого-цифрового преобразователя 12;
- tзад.н - задержка распространения акустических сигналов от точек Tн и Tи до акустического приемника П (см. подробнее ниже).
Сдвинутые сигналы подаются на входы первого цифроаналогового преобразователя 14 и преобразуются им с тактовой частотой, равной Fкор в аналоговый вид. При этом, блок управления сдвигом 21 вырабатывает импульс, который запускает через четвертый переключатель 27 второй аналого-цифровой преобразователь 15 на преобразование акустического сигнала, подаваемого на его второй вход с второго выхода первого цифроаналогового преобразователя 14. Акустический сигнал при внешней дискретизации второго аналого-цифрового преобразователя 15 сигналом частоты дискретизации Fд, снимаемым через третий переключатель 26 с первого выхода первого цифроаналогового преобразователя 14, преобразуется в цифровой вид и заносится во второй канал второго блока памяти 16.
Во втором блоке памяти 16 цифровой вибрационный сигнал задерживается относительно акустического сигнала и соответственно начального кода времени на величину, учитывающую разность лучей распространения информационного акустического сигнала от синхронизируемой точки и акустического синхросигнала от точки его излучения до акустического приемника П (см. фиг. 5). Для начальной синхронизируемой точки Tн начальный код времени синхросигнала задерживается относительно информационного акустического сигнала на величину tзад.н., вычисляемую
где (-ΔLн) - разность лучей распространения акустических сигналов от точек Tн и Tи до акустического приемника П;
Vзв - скорость распространения акустических волн в среде.
Опережение акустического сигнала заменяется адекватной для синхронизации задержкой вибрационного сигнала на эту величину.
Задержка сигналов осуществляется путем установки начальных адресов вывода цифровых сигналов в блоке памяти 16 блоком управления задержкой 23 по шине управления задержкой 24. Для начальной синхронизируемой точки Tн вывод акустического сигнала производится с нулевой ячейки памяти (по аналогии см. фиг. 4), а вибрационного сигнала с К-ой ячейки памяти, рассчитываемой
где  - период дискретизации второго аналого-цифрового преобразователя 15.
- период дискретизации второго аналого-цифрового преобразователя 15.
Задержанный вибрационный и акустический сигналы через второй цифроаналоговый преобразователь 17 в аналоговом или цифровом виде подаются на входы коррелятора 18, при этом, блок управления задержкой 23 вырабатывает импульс, который запускает коррелятор 18 на измерение.
В корреляторе 18 через измерение функции корреляции, когерентности или следящим спектральным анализом измеряют величину корреляции засинхронизированных относительно точки Tн вибрационного и акустического сигналов. Результаты корреляционных измерений для интересующих дискретных составляющих или частотных полос регистрируются.
Аналогично, по управляющим шинам сдвига 22 и задержки 24, производится синхронизация сигналов для каждой выбранной точки синхронизации по длине объекта измерения, измерение коррелятором 18 функции корреляции сигналов и ее регистрация.
Для точек синхронизации, расположенных по ходу движения объекта измерения впереди относительно точки излучения синхросигнала, в первом блоке памяти 13 сигнал дискретизации Fд сдвигается относительно акустического сигнала, во втором блоке памяти 16 вибрационный сигнал задерживается относительно акустического сигнала. Для точки синхронизации, совпадающей с точкой излучения синхросигнала, сдвиг и задержка сигналов не выполняются.
Для точек синхронизации, расположенных по ходу движения объекта измерения после точки излучения синхросигнала, синхронизацию вибрационных и акустического сигналов рассмотрим на следующем примере. Конечная синхронизируемая точка Tк, находящаяся на расстоянии Lк от точки излучения синхросигнала Tи (см. фиг. 3) пройдет минимальное расстояние относительно акустического приемника П позже, чем точка излучения синхросигнала Tи, что соответствует сдвигу функции доплеровского смещения частоты tсдв.к, вычисляемого
Кроме того, для конечной синхронизируемой точки Tк информационный акустический сигнал задерживается относительно акустического синхросигнала (см. фиг. 5) на величину
где (ΔLк) - разность лучей распространения акустических сигналов от точек Tк и Tи до акустического приемника П.
Следовательно, акустический сигнал в первом блоке памяти 13 должен быть сдвинут относительно сигнала дискретизации Fд на величину tсдв.к + tзад.к, то есть вывод сигнала дискретизации Fд производится с нулевой ячейки памяти (по аналогии см. фиг. 4), а акустического сигнала с N - ячейки памяти, рассчитываемой по формуле
Отметим, что в блоке памяти 13 учтена задержка акустического сигнала точки Tк относительно начального кода времени, однако введена дополнительная задержка, равная tсдв.к, которая должна быть скомпенсирована во втором блоке памяти 16 задержкой вибрационного сигнала. В блоке памяти 16 вывод акустического сигнала производится с нулевой ячейки памяти (по аналогии см. фиг. 4), а вибрационного сигнала с K - ячейки, рассчитываемой
Расчет величин сдвигов и задержек для остальных точек производится по вышеприведенным формулам с учетом их расположения относительно точки излучения синхросигнала.
Определяется максимум корреляционной функции и соответствующая ему точка синхронизации. По нормированному максимальному уровню корреляционной функции по известным критериям выносят решение о принадлежности измеренного механизма к источникам акустического поля объекта измерения и величине его вклада. Точка синхронизации, соответствующая максимуму корреляционной функции, для которой получен наилучший результат по синхронизации сигналов, определяет зону излучения акустической энергии измеренного механизма.
Аналогично производятся корреляционные измерения для акустического и каждого выбранного по спектрам вибрационных сигналов.
Известные способы определения зон излучения [1], источников акустического поля движущегося объекта измерения [2] основаны на измерении энергетических спектров сигналов.
При использовании настоящего изобретения измеряются взаимные спектральные характеристики вибрационного и акустического сигналов, что значительно повышает точность определения зон излучения и диагностики источников акустического поля объекта измерения. Неоднозначность результатов исключается.
Впервые появляется возможность измерить вклады источников в акустический сигнал движущегося объекта измерения, что позволяет распределить их по степени значимости в формировании акустического поля.
Анализ конструкции объекта измерения от мест установки механизмов до зон излучения акустической энергии позволяет определить наиболее вероятные пути ее распространения.
Отметим, что решение поставленной задачи может производиться как по дискретным спектральным составляющим, так и в широких полосах частот.
Экономическая эффективность использования изобретения заключается в получении более точной и комплектной информации об акустических параметрах объекта измерения, в результате сокращается продолжительность испытаний объекта измерения, повышается эффективность конструкторских мероприятий, направленных на повышение его технических характеристик.
Литература
1. Технический отчет. Описание программ определения координат по методу доплеровского сканирования на вычислительном комплексе ИН-110. Выпуск 31336. Предприятие п/я В-8662, 1986 г, стр.4.
2. А.К.Новиков. Статистические измерения в судовой акустике. - Л.: Судостроение, 1985, стр.233-240, 238.
3. Брюль и Къер. Краткий каталог. Приборы для анализа звука, вибраций и обработки данных, 1978 г, стр. 10 и 16.
4. Инструкция по эксплуатации. Измерительные магнитофоны типа 7003 и 7004. Брюль и Къер, 1977, стр. 40-41.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ КВАРЦЕВЫХ ГЕНЕРАТОРОВ | 1990 |
|
RU2085958C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕЧЕЙ В АРМАТУРЕ, ТРУБОПРОВОДАХ, СОСУДАХ ДАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2132510C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕВИЗИОННЫХ СИГНАЛОВ | 1991 |
|
RU2014745C1 |
| ЦИФРОВОЙ СИНТЕЗАТОР ЧАСТОТ | 1991 |
|
RU2030092C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПРИЕМНИКОВ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 1990 |
|
RU2018150C1 |
| Радиоприемное устройство | 1980 |
|
SU906008A1 |
| Абонентский приемник в составе гидроакустической системы позиционирования большой дальности для глубокого моря | 2022 |
|
RU2789636C1 |
| КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНЫЙ КООРДИНАТОР ЦЕЛИ | 1989 |
|
RU2103707C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ | 2012 |
|
RU2538281C2 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |

При реализации способа с помощью устройства для измерения и регистрации вибрационных и акустических сигналов движущегося объекта формируют синхросигнал несущей частоты, промодулированный отсчетами времени, и записывают его параллельно с вибрационными сигналами. Преобразуют синхросигнал из электрического в акустический, излучают его с объекта измерения, принимают, фильтруют и записывают параллельно с акустическими сигналами. Используя синхросигнал, с помощью устройства для определения координат зон излучения, диагностики источников и измерения их вкладов в акустическое поле движущегося объекта приводят вибрационный и акустический сигналы к единому масштабу времени относительно выбранных по длине объекта точек синхронизации. Измеряют величину корреляции сигналов относительно каждой точки. О зоне излучения, источнике и величине его вклада судят по максимальной величине корреляции и расположению соответствующей ей точке синхронизации. Повышается точность определения зон излучения, диагностики источников акустического поля и снятие ограничений на спектральный состав сигналов. 3 с.п.ф-лы, 5 ил.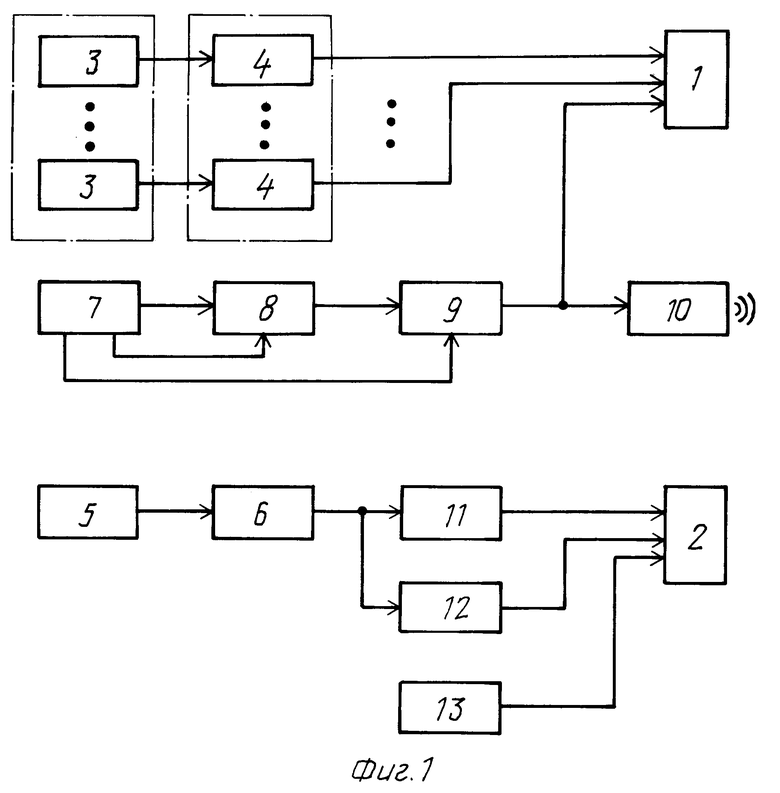
| Брюль и Къер | |||
| Краткий каталог | |||
| Приборы для анализа звука вибраций и обработки данных, 1978, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Многоканальный измеритель вибрации | 1987 |
|
SU1444621A1 |
| DE 3543792 A1, 19.06.87. | |||

