Изобретение относится к области электроизмерительных приборов определения веса грузов, перемещаемых подъемными механизмами с электроприводом.
Известно множество подъемных механизмов с электроприводом [1 - 7], известны весоизмерители подъемных устройств, основанные на использовании силоизмерительных датчиков, встраиваемых в крюк захвата груза, под оси барабана грузового каната, в другие узлы грузоподъемных механизмов [8]. Однако последние обладают низкой надежностью и точностью, особенно в тяжелых условиях эксплуатации.
В качестве прототипа взято техническое решение [9], согласно которому на выделенном участке безтормозного подъема груза определяют электрическую мощность Pi(t), потребляемую электродвигателем привода подъемного механизма, а вес Gi поднимаемого груза вычисляют как пропорциональный измеренной мощности
Gi = k•Pi(t) (1)
При повышенной надежности прототип обладает ограниченной точностью, поскольку коэффициент полезного действия подъемного механизма η, как и вес тары с выпускаемым грузовым канатом, по умолчанию взяты постоянными значениями, а главное согласно Gi δ • h = η • Pi(t) • δ t, - закона сохранения энергии, где δ h - приращение высоты на временном интервале δ t подъема груза, использованная пропорция (1) справедлива лишь при k = η • δ t/ δ h) = Const, то есть когда операцию подъема груза выполняют с постоянной скоростью δ h/ δ t = Const, избегая всяких динамических возмущений (например, маятниковых и продольных упругих колебаний груза на канате). Выполнение этих требований усложняет технологический процесс подъема грузов, снижает производительность погрузочно-разгрузочных работ, а их нарушение приводит к появлению соответствующих ошибок взвешивания.
Указанные недостатки прототипа в данном изобретении устраняются, поскольку при взвешивании используют не приближенную зависимость веса груза от потребляемой приводом подъемника электрической мощности GБГрi(t) = χ (P(Ui(t),Ii(t))), а фундаментальный закон сохранения энергии:
GБГрi(t)•hiотн = η(Wi/hiотн)•Wi, (2)
где GБГрi(t) • hiотн - потенциальная энергия, приобретаемая брутто-грузом GБГрi(t) при подъеме его на высоту hiотн; Wi - электроэнергия, затраченная на указанный подъем этого груза; η (Wi/hiотн) - коэффициент полезного действия привода подъема, являющийся функцией своего аргумента, справедливый для любых технологических приемов безтормозного подъема грузов, чем уже обеспечивается повышение производительности погрузочно-разгрузочных работ и точность определения веса грузов.
Точность определения веса грузов дополнительно повышается, поскольку в процессе взвешивания, то есть при определении веса полезного груза GГрi:
GГрi = η(Wi/hiотн)•Wi/hiотн-G0-hiотн•qк (3)
к тому же учитывают: G0 - вес грузового захвата, hiотн - высоту подъема груза hiотн = LKi(tiок) - LKi(tiнч), где LK(t) - длина выпущенного грузового каната, tiнч, tiок - начало и конец временного интервала подъема i-го груза, qк • LK(t) - вес выпускаемого грузового каната, где qк - известный вес погонного метра грузового каната, η (Wi/hiотн), η P(t)/ δ LK(t)) = η GБГрi(t)) - функции полезного действия привода при подъеме брутто-груза GБГрi(t)) = GГрi + G0 + hiотн • qк с аргументами либо текущего значения относительной мощности P(t) δ LK(t)), либо итоговым значением относительной энергии Wi/hiотн, потребленной при подъеме груза.
По способу кроме того введены операции сопутствующего контроля точности взвешивания и метрологической алгоритмической юстировки:
- при возвратном порожнем (GГр = 0) подъемном движении за новым грузом нажимают кнопку "Контроль", вычисляют по видоизмененной рабочей формуле (3) вес узла захвата груза G0И = η W/hотн) • WИ/hИотн - hИотн • qк, где "И" - индекс параметров, определяемых при контроле точности взвешивания, сравнивают его с введенным при предыдущей юстировке значением G0 и по факту выхода отклонения (G0И-G0) за пределы назначенного δ G0ДОП допуска (G0И-G0)2 > ( δ G0ДОП)2 судят о нарушении точности взвешивания, анализируют и устраняют видимые причины этого разбаланса, в том числе исполняя при необходимости и метрологическую алгоритмическую юстировку;
- в процессе метрологической алгоритмической юстировки выполняют многократный (1 ≤ j ≤ J) подъем каждого GjГроб(m) из магазина (1 ≤ m ≤ М) образцовых грузов и при этом с помощью подстыковываемого контроллера юстировки по запрограммированным в нем уравнениям вычисляют следующие параметры и функции:
где Pjm(t) - текущее значение электрической мощности, потребляемой двигателем привода подъема груза, δ Ljm(t) - текущее значение приращения длины грузового каната;
используя практически разновидности того же самого основного выражения (3) закона сохранения энергии. Полученные параметры и функции запоминают и используют их в процессе дальнейших взвешиваний вплоть до следующей юстировки.
На фиг. 1 представлена схема устройства, реализующего изложенный способ. Устройство состоит из электродвигателя, редуктора, барабана с грузовым канатом, органов управления подачей на электродвигатель подъемного механизма необходимых напряжений и токов, кнопок "Сброс грузов" (раскрытия ковша для сыпучих, обесточивания электромагнитного зацепа для ферромагнитных грузов), "Тормоз", "Контроль", "Обнуление", тумблера "Включение весов", датчика 1 потребляемой электродвигателем привода электрической мощности Pi(t), датчика 2 длины LKi(t) выпущенного грузового каната, шести сумматоров 27, 28, 32, 33, 35, 7, четырех умножителей 31, 29, 6, 21, трех делителей 30, 11, 20, трех логических элементов "И" 26, 13, 14, шести ключей 9, 17, 23, 24, 25, 34, блока памяти (энергонезависимого запоминающего устройства) 37, индикатора 38, генератора тактовых импульсов 16, четырех компараторов 4, 12, 10, 19, двух дифференциаторов 3, 5, двух логических элементов "ИЛИ" 15, 18, статического триггера 22, цепочки диодной развязки VD, блока электропитания 8, контроллера юстировки 36 с задатчиком уставок контроля, соединенных вполне определенным образом.
Выход датчика мощности 1 связан одновременно со входом первого дифференциатора 3, первым входом первого компаратора 4, вторым входом третьего ключа 23, вторым входом третьего делителя 20. Второй компаратор 12 подключен входом к выходу первого дифференциатора 3, первым выходом - ко второму входу первой схемы "И" 26, третьим выходом - к первому открывающему входу второго ключа 17. Второй ключ 17 подсоединен вторым входом к выходу генератора тактовых импульсов 16, а выходом - к первому единичному входу статического триггера 22. Первая схема "И" 26 соединена первым входом с первым единичным выходом статического триггера 22, а выходом - со вторым входом второй схемы "И" 13. Вторая схема "И" 13 подключена первым входом к третьему выходу третьего компаратора 10, третьим входом одновременно - к первому выходу первого компаратора 4, к выходу кнопки "Контроль", к первому закрывающему входу первого ключа 9 и ко второму входу третьей схемы "И" 14, а выходом одновременно ко второму нулевому входу триггера 22 и к первым открывающим входам третьего 23 и четвертого 24 ключей. Первый компаратор 4 связан вторым входом с выходом второго делителя 11, а третьим выходом - со вторым входом первого ключа 9. Датчик длины выпущенного грузового каната 2 соединен одновременно со входом второго дифференциатора 5, вторыми входами четвертого 24 и пятого 25 ключей и первым входом третьего умножителя 6. Третий компаратор 10 входом подсоединен к выходу второго дифференциатора 5 и к первому в качестве делителя входу третьего делителя 20, а первым и вторым выходами соответственно ко второму и первому входам первой схемы "ИЛИ" 15. Третья схема "И" 14 подключена первым входом к выходу первой схемы "ИЛИ" 15, а выходом - к первому входу второй схемы "ИЛИ" 18. Вторая схема "ИЛИ" 18 связана вторым и третьим входами соответственно с выходами кнопок "Сброс груза" и "Тормоз", а выходом - с третьим закрывающим входом третьего ключа 23 и первым открывающим входом пятого ключа 25. Первый сумматор 27 соединен первым входом с выходом третьего ключа 23, а выходом одновременно с первым в качестве делимого входом первого делителя 30 и с первым входом (Wi) контроллера юстировки 36. Второй сумматор 28 подсоединен первым суммирующим входом к выходу четвертого ключа 24, третьим вычитающим входом к выходу пятого ключа 25, а выходом одновременно - ко второму в качестве делителя входу первого делителя 30, к первому входу второго умножителя 29 и ко второму входу (hiотн) контроллера юстировки 36. Первый делитель 30 выходом подключен одновременно к первому входу первого умножителя 31 и к третьему входу (Wi/hiотн) энергонезависимого запоминающего устройства 37. Первый умножитель 31 подсоединен вторым входом одновременно ко второму выходу ( η Wi/hiотн) энергонезависимого запоминающего устройства 37 и к четвертому входу контроллера юстировки 36, а выходом - к первому суммирующему входу третьего сумматора 32. Третий сумматор 32 соединен третьим вычитающим входом с выходом второго умножителя 29, а выходом - с первым суммирующим входом четвертого сумматора 33. Четвертый сумматор 33 связан третьим вычитающим входом одновременно с четвертым выходом (G0) энергонезависимого запоминающего устройства 37, третьим входом контроллера юстировки 36 и третьим суммирующим входом шестого сумматора 7, а выходом (GГрi) одновременно с первым входом пятого сумматора 35, вторым входом шестого ключа 34, четвертым входом энергонезависимого запоминающего устройства 37, шестым входом контроллера юстировки 36 и первым входом индикатора 38. Пятый сумматор 35 соединен выходом (GГрΣ) одновременно со вторым входом индикатора 38, пятым входом энергонезависимого запоминающего устройства 37 и пятым входом контроллера юстировки 36. Контроллер юстировки 36 подсоединен выходами: первым (qк), вторым (G0), третьим η и четвертым (( δ G0ДОП)2) - соответственно к десятому, девятому, восьмому и седьмому входам энергонезависимого запоминающего устройства 37, входами: седьмым (GГроб(m)), восьмым (( δ G0ДОП)2) и девятым (qк) к задатчику уставок контроля. Энергонезависимое запоминающее устройство 37 подключено первым входом через диодную развязку (VD) к выходу кнопки "Обнуление", вторым входом (P(t)/ δ LK(t)) - к выходу третьего делителя 20, первым выходом (( δ G0ДОП)2) - ко второму входу четвертого компаратора 19, третьим выходом η ко второму в качестве делителя входу второго умножителя 29 и ко второму входу третьего умножителя 6. Третий умножитель 6 выходом соединен с первым входом шестого сумматора 7. Шестой сумматор 7 выходом подсоединен к первому в качестве делимого входу второго делителя 11. Шестой ключ 34 связан первым открывающим входом с выходом кнопки "Контроль", а выходом одновременно с шестым входом энергонезависимого запоминающего устройства 37, с четвертым входом индикатора 38, с первым и вторым входами четвертого умножителя 21. Четвертый умножитель 21 выходом соединен с первым входом четвертого компаратора 19. Четвертый компаратор 19 первым выходом подключен к третьему входу индикатора 38. Выход кнопки "Обнуление" связан непосредственно со вторым обнуляющим входом пятого сумматора 35, через диодную развязку (VD) - со вторыми обнуляющими входами первого 27, второго 28, третьего 32, четвертого 33 и шестого 7 сумматоров. Вторые обнуляющие входы первого 27, второго 28, третьего 32, четвертого 33 и шестого 7 сумматоров соединены также и с выходом первого ключа 9.
Устройство работает следующим образом. В начале подъема брутто-груза GБГрi(t) мощность Pi(t), потребляемая электродвигателем привода, возрастает, ее дифференциал, подаваемый с выхода дифференциатора 3 на вход второго компаратора 12, имеет при этом положительное значение δ Pi(t)/ δτ > 0, что приводит к появлению на третьем выходе второго компаратора 12 сигнала, открывающего второй ключ 17, и через него начинают проходить импульсы от тактового генератора 16 на первый единичный вход статического триггера 22. Триггер переходит в единичное состояние и по первому входу открывает первую схему "И" 26. После отрыва груза от площадки мощность Pi(t) преодолевает свой максимум, ее дифференциал становится отрицательным δ Pi(t)/ δτ < 0 и теперь на первом выходе второго компаратора 12 появляется сигнал, проходящий через первую схему "И" 26 на открытие по второму входу второй схемы "И" 13. В первом компараторе 4 сравниваются значения Pi(t), поступающее на первый вход от датчика 1 и PT(LKi(t)), поступающее на второй вход с выхода второго делителя 11. При Pi(t) - PT(LKi(t)) > 0, что является признаком наличия при подъеме полезного груза, сигнал с первого выхода первого компаратора 4 открывает вторую схему "И" 13 и по третьему входу. Вторая схема "И" 13 полностью откроется, если и на ее первый вход с третьего выхода третьего компаратора 10 поступит сигнал о том, что дифференциал δ LKi(t) (выход дифференциатора 5) сигнала от датчика 2 длины LKi(t) убираемого грузового каната имеет отрицательное значение δ LKi(t) < 0. Сигнал с выхода второй схемы "И" 13 поступает на открывающие первые входы третьего 23 и четвертого 24 ключей, а также на второй обнуляющий вход триггера 22 и переводит его в нулевое состояние. С открытием третьего ключа 23 в первом сумматоре 27 начинает подсчитываться электрическая энергия Wi, затрачиваемая на подъем груза. Через открывшийся четвертый ключ 24 на первый вход второго сумматора 28 заносится LKi(tiнч) длина грузового каната в момент tiнч - начала участка устойчивого подъема груза.
Момент tiок - конца участка устойчивого подъема груза формируется сигналом на выходе второй схемы "ИЛИ" 18 как признак нажатия кнопки "Сброс груза" (по второму входу), или кнопки "Тормоз" (по третьему входу), или появления сигнала на первом ее входе с выхода третьей схемы "И" 14. Третья схема "И" 14 открывается по второму входу сигналом с первого выхода первого компаратора 4, если полезный груз еще не сброшен Pi(t) - PT(LKi(t)) > 0, а по первому входу сигналом с выхода первой схемы "ИЛИ" 15, если от третьего компаратора 10 со второго выхода поступил сигнал δ LKi(t) = 0 останова подъема или с его третьего выхода - сигнал реверса δ LKi(t) > 0 привода подъемника. В момент tiок выходным сигналом второй схемы "ИЛИ" 18 по третьему входу закрывается третий ключ 23 и в первом сумматоре 27 завершается подсчет электрической энергии Wi, затраченной на подъем i-го груза. Значение этой энергии Wi с выхода сумматора 27 поступает на первый вход делителя 30 и на первый вход контроллера юстировки 36. С выхода второй схемы "ИЛИ" 18 сигнал поступает также на первый открывающий вход пятого ключа 25, при этом через него на третий вычитающий вход второго сумматора 28 подается значение LKi(tiок). С выхода второго сумматора 28 сигнал hiотн = LKi(tiнч) - LKi(tiок) об относительной высоте подъема груза поступает на второй вход первого делителя 30, первый вход второго умножителя 29 и второй вход контроллера юстировки 36. С выхода делителя 30 частное Wi/hiотн поступает на первый вход первого умножителя 31 и на третий вход энергонезависимого запоминающего устройства 37 в качестве аргумента для выбора из памяти 37 конкретного значения функции η (Wi/hiотн), которое со второго выхода энергонезависимого запоминающего устройства 37 подается на второй вход первого умножителя 31. С выхода умножителя 31 произведение η (Wi/hiотн) • Wi/hiотн поступает на первый вход третьего сумматора 32. На второй вход второго умножителя 29 из энергонезависимого запоминающего устройства 37 через пятый выход поступает значение уставки qк. Результат перемножения hiотн • qк с выхода второго умножителя 29 подается на третий вычитающий вход третьего сумматора 32, в результате чего на его выходе получается величина η (Wi/hiотн) • Wi/hiотн - hiотн • qк. Эта величина с выхода третьего сумматора 32 поступает на первый суммирующий вход четвертого сумматора 33, где от нее отнимается поступающее на третий вычитающий вход с четвертого выхода энергонезависимого запоминающего устройства 37 значение G0. Полученный на выходе четвертого сумматора 33 результат соответствует выражению (3) и представляет собой вес полезного груза GГрi. Поэтому он подается на первый вход индикатора 38 для визуализации, на четвертый вход энергонезависимого запоминающего устройства 37 для регистрации, на шестой вход контроллера юстировки 36 при алгоритмической автоматизированной настройке весов и на первый суммирующий вход пятого сумматора 35 для определения веса всех перемещенных грузов GГрΣ = ΣNGГрi при 1 ≤ i ≤ N. Этот итоговый результат с выхода пятого сумматора 35 поступает на второй вход индикатора 38 для отображения, на пятый вход энергонезависимого запоминающего устройства 37 для последующего автоматизированного контроля и учета выполненных погрузочно-разгрузочных работ и на пятый вход контроллера юстировки 36.
При выполнении операции сопутствующего контроля точности взвешивания, которая производится при возвратном порожнем (GГр = 0) подъемном движении за новым грузом путем нажатия кнопки "Контроль", сигнал от которой поступает на первый выход первого компаратора 4, имитируя для логических цепей (третий вход второго элемента "И" 13, второй вход третьего элемента "И" 14) условия наличия полезного груза, на первый закрывающий вход первого ключа 9, запрещая прохождение со второго выхода первого компаратора 4 объективного признака Pi(t) - PT(LKi(t)) ≤ 0 - отсутствия полезного груза, на первый открывающий вход шестого ключа 34 - для передачи с выхода четвертого сумматора 33 сигнала невязки G0И - G0 = η (W/hотн) • WИ/hотнИ - hотнИ • qк - на оба входа четвертого умножителя 21. С выхода умножителя 21 величина квадрата невязки (G0И - G0)2 поступает на первый вход четвертого компаратора 19, где сравнивается с уставкой квадрата допуска ( δ G0ДОП)2, подаваемой на его второй вход с первого выхода энергонезависимого запоминающего устройства 37. Уставка квадрата ( δ G0ДОП)2 допуска при юстировке переносится с четвертого выхода контроллера 36 через седьмой вход в энергонезависимое запоминающее устройство 37. При выходе невязки за пределы назначенного допуска (G0И - G0)2 > ( δ G0ДОП)2 с первого выхода четвертого компаратора 19 на третий вход индикатора 38 подается сигнал о недопустимой ошибке взвешивания и величина невязки с выхода шестого ключа 34 заносится через шестой вход в энергонезависимое запоминающее устройство 37 для последующей корректировки результатов взвешивания и через четвертый вход индикатора 38 на визуализацию.
При юстировке в качестве полезного груза GГр многократно (1 ≤ j ≤ J) поднимают каждый из образцовых грузов GГрОБ(m) магазина (1 ≤ m ≤ М). В контроллере юстировки 36 запрограммирована система уравнений (4), (5), полученная, как отмечалось выше, на основе зависимости (3), отражающей закон сохранения энергии, и содержащая вычисления среднестатистических оценок юстируемых параметров. Совместное решение системы (4), (5) осуществляется при начальных условиях η (W/hотн) и G0, полученных со второго и четвертого выходов энергонезависимого запоминающего устройства 37 при введенных в контроллер юстировки 36 поверяющим уставок GГрОБ(m), qm, при вводимых с выхода первого сумматора 27 потребляемой электроэнергии Wjm, с выхода второго сумматора 28 - высоты подъема груза hjmотн. Полученные в результате решения системы (4), (5) уточненные юстированные значения функций η (P(t)/ δ LKi(t)), η (W/hотн) и параметра G0 передаются соответственно с третьего и второго выходов контроллера юстировки 36 на восьмой и девятый входы энергонезависимого запоминающего устройства 37 вместо прежних устаревших значений и используются далее в процессе взвешивания грузов и как начальные условия при очередной юстировке.
Источники информации
1. Н.Ф.Руденко, Грузоподъемные машины, Машгиз, 1956.
2. А.Г. Ланг, B.C. Майзель, Портальные краны, Машгиз, 1953.
3. А.Б. Парницкий, А.П. Шабашов, Мостовые краны общего назначения, Машгиз, 1958.
4. А. И. Лошак, Крановое электрооборудование переменного тока, Металлургиздат, 1953.
5. Крановые двигатели переменного тока, каталог ЦБТИ, МЭП, 1951.
6. Крановые двигатели постоянного тока, каталог ЦБТИ, МЭП, 1952.
7. А.Г. Меклер, Электрооборудование подъемно-транспортных Машин, Машгиз, 1954.
8. Авторское свидетельство СССР N 1362944 A1, кл. G 01 G 19/14 "Устройство для взвешивания", 1986.
9. Авторское свидетельство СССР N 1114894 A, кл. G 01 G 19/14 "Устройство для определения веса расплава в ковшах на подъемных кранах", 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2334955C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УБОРКИ ЗЕРНА КОМБАЙНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462019C1 |
| Устройство для отображения графической информации на экране электронно-лучевой трубки | 1980 |
|
SU940213A1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1991 |
|
RU2005993C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2426219C1 |
| СКАНИРУЮЩИЙ РАДИОМЕТР | 2012 |
|
RU2495443C1 |
| Устройство для считывания графической информации | 1987 |
|
SU1564661A1 |
| Фазометр | 1991 |
|
SU1817037A1 |
Изобретение предназначено для определения веса грузов, перемещаемых подъемными механизмами с электроприводом. Измеряют высоту безтормозного подъема груза. Определяют значение электроэнергии, затраченной на этот подъем. Используя закон сохранения энергии, вычисляют брутто-вес поднятого на эту высоту груза. Чистый вес полезного поднятого груза определяют с учетом веса выпущенного грузового каната, веса узла захвата груза и коэффициента полезного действия подъемного устройства как функции потребляемой электроприводом при подъемном безтормозном движении электроэнергии. При возвратном порожнем подъемном движении за новым грузом, нажимая кнопку "Тарировка", автоматически контролируют точность процесса взвешивания. Метрологическую юстировку производят алгоритмически с помощью контроллера юстировки путем многократных подъемов эталонных грузов различного веса. Устройство содержит датчик потребляемой электродвигателем подъемного механизма электрической мощности, датчик длины выпущенного грузового каната, вычислитель, контроллер юстировки, индикатор, дополнительные органы управления, кнопки "Тарировка", "Обнуление" и тумблер "Включение весов". Технический результат - повышение надежности, точности, учета и производительности погрузочно-разгрузочных работ. 2 с.п. ф-лы, 1 ил.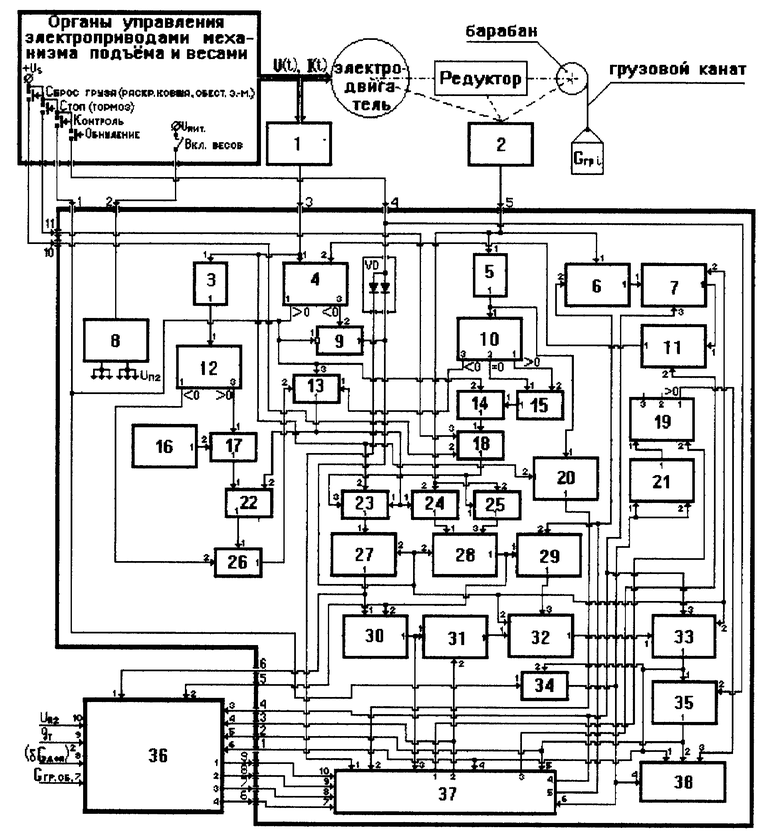
GГрi = η(Wi/hiотн)•Wi/hiотн-G0-hiотн•qк,
при этом приведение технологического процесса определения веса груза при Pi(t) - PT(Lki(t))<0 в исходное состояние осуществляют путем обнуления использованных значений hiотн, Wi, G0 + qk • Lki(t), GГpi(t), η (Wi/hiотн) • Wi/hiотн - G0 - hiотн • qk, затем при возвратном порожнем подъемном движении за новым грузом производят контроль и автоматическую оценку точности процесса взвешивания груза G0И по выходу отклонения (G0И - G0) за пределы заданного допуска δ G0доп: (G0И - G0)2 > ( δ G0доп)2, где G0 - уточненное и запомненное при предыдущей юстировке значение веса узла захвата груза, G0И = η (WИ / hотнИ) • WИ / hотнИ - hотнИ • qk - вычисляемое при контроле значение веса узла захвата груза, И - индекс параметров, определяемых при контроле точности взвешивания, затем при необходимости выполняют метрологическую алгоритмическую юстировку путем многократных (1≤ j ≤ J) подъемов каждого GГроб (m) из (1 ≤ m ≤ M) магазина образцовых грузов, вычисления с помощью подстыковываемого контроллера юстировки по запрограммированным в нем уравнениям следующих параметров и функций
где Pjm(t) - текущее значение электрической мощности, потребляемой двигателем привода подъема груза;
δ Ljm(t) - текущее значение приращения длины грузового каната;
затем указанные параметры и функции запоминают и используют в процессе дальнейшего взвешивания, а вес всего полезного перемещенного груза 1≤ j ≤ N определяют автоматически как результат итогового суммирования GГрΣ = ΣNGГрi всех i слагаемых, причем получаемые результаты взвешивания запоминают для автоматизированного анализа и контроля выполненных погрузочно-разгрузочных работ.
| Устройство для определения веса расплава в ковшах на подъемных кранах | 1983 |
|
SU1114894A1 |
| Весоизмерительное устройство для грузов, подвешенных в захвате конвейера | 1991 |
|
SU1806331A3 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗА | 1997 |
|
RU2119648C1 |
| GB 1462785 A, 26.01.77 | |||
| DE 3042968 A1, 01.07.82. | |||
