Изобретение относится к области измерительной техники и может быть использовано для контроля технического состояния колес рельсового подвижного состава.
Известен способ контроля поверхности катания колеса при движении рельсового подвижного состава (патент RU № 2122956, МПК В 61 К 9/12).
Способ основан на формировании растра из М разнесенных вдоль направления движения колеса вееров лучей по N лучей в каждом веере, облучении в момент измерения поверхности катания колеса, регистрации отраженных лучей с помощью М·L фотоприемников, измерении временных интервалов между M·N·L откликами фотоприемников и расчете параметров отклонения формы поверхности катания колеса от эталонной формы путем сравнения измеренных интервалов с известным распределением величин интервалов для эталонной формы.
Недостатками приведенного способа контроля являются его чувствительность к весу вагона, воздействию вибраций и изменению температуры. Кроме того, реализация способа предусматривает изменение конструкции рельсового пути, которое приводит к снижению его прочности.
Наиболее близким к предлагаемому способу является способ бесконтактного динамического контроля износа колес подвижного состава (патент RU № 2147729, МПК G 01 В 11/24, В 61 К 9/12).
Способ заключается в том, что во время движения железнодорожного состава облучают контролируемую поверхность качения колеса и гребня оптическим лучом в виде последовательности коротких импульсов определенной частоты и принимают отраженную картину фотоприемником, при этом излучатель с фокусирующей световой поток оптикой, матричный фотоприемник с объективом помещают на общем основании, стабилизируют пространственное положение оптических осей излучателя и приемника, обеспечивая тем самым возможность контроля. Частоту импульсов света задают величиной, пропорциональной скорости движения колеса, которую определяют по величине перемещения контрастных элементов изображения колеса на фотоприемной матрице за определенный промежуток времени. На боковой поверхности рельса помещают контрастную метку в виде узкой полосы, по запаздыванию видеосигнала от метки судят об изменениях высоты головки рельса и по разнице полученной последовательности световых сигналов, скорректированной с учетом высоты головки рельса относительно оптических осей излучателя и приемника, и эталонной последовательности световых сигналов судят о степени износа рабочего профиля поверхности качения колеса.
Признаками прототипа, совпадающими с существенными признаками заявляемого изобретения, являются облучение элемента контролируемого колеса (в прототипе поверхности качения колеса) потоком излучения в виде последовательности коротких импульсов с частотой импульсной модуляции, пропорциональной скорости движения колеса, прием отраженной картины приемником излучения, помещение контрастной метки на боковой поверхности рельса.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, относятся:
- низкая информативность способа, так как контроль колеса осуществляется только по одному сечению, и, следовательно, способ не позволяет контролировать некруглость колеса, то есть обнаруживать навары, ползуны и другие дефекты, приводящие к ударным нагрузкам на колесную пару;
- усложнение конструкции устройства, реализующего указанный способ, связанное с необходимостью стабилизации пространственного положения оптических осей излучателя и приемника;
- низкая эксплуатационная надежность способа, являющаяся следствием близкого расположения излучателя и приемника к железнодорожному пути и сильного воздействия внешних влияющих факторов (пыль, вода, снег).
Предлагаемое авторами изобретение ставит перед собой решение следующих задач:
- бесконтактный динамический контроль параметров железнодорожного колеса по всей окружности;
- упрощение конструкции за счет исключения необходимости стабилизации пространственного положения оптических осей излучателя и приемника;
- повышение надежности контроля.
При осуществлении изобретения может быть получен следующий технический результат: оперативный, высоконадежный, бесконтактный контроль износа колеса по всему периметру (овальности, навара, ползуна).
Указанный технический результат при осуществлении изобретения достигается тем, что в заявляемом способе бесконтактного динамического контроля параметров колес подвижного состава облучают буксу контролируемого колеса и рельс, принимают отраженную картину приемником излучения, при этом излучатель с формирователем потока излучения и матричный приемник с объективом помещают на удалении от рельсового пути. На боковой поверхности рельса помещают контрастную метку. Буксу контролируемого колеса и рельс облучают потоком излучения в виде последовательности коротких импульсов определенной частоты, частоту импульсной модуляции задают величиной, пропорциональной скорости движения колеса, которую определяют, в частности, по величине горизонтального перемещения фрагмента изображения буксы, содержащего контрастные элементы, за определенный промежуток времени. Величину горизонтального перемещения фрагмента изображения буксы определяют по разности горизонтальных координат максимумов корреляционных функций, получаемых при корреляции эталонного фрагмента изображения буксы с изображениями в двух последовательных кадрах. Определяют положение максимумов корреляционных функций, получаемых при корреляции эталонного фрагмента изображения буксы с изображением в текущем кадре, определяют положение максимумов корреляционных функций, получаемых при корреляции эталонного фрагмента изображения рельса, содержащего изображение контрастной метки, с изображением в текущем кадре, по изменению вертикальных координат максимумов корреляционных функций буксы и рельса в кадрах изображений судят об изменениях радиуса колеса, а следовательно, и параметрах колеса.
Отличительными от прототипа признаками являются: размещение источника излучения и приемника излучения на удалении от рельсового пути, облучение источником излучения буксы контролируемого колеса и рельса, определение положения максимумов корреляционных функций, получаемых при корреляции эталонного фрагмента изображения буксы с изображением в текущем кадре, определение положения максимумов корреляционных функций, получаемых при корреляции эталонного фрагмента изображения рельса, содержащего изображение контрастной метки, с изображением в текущем кадре. По изменению вертикальных координат максимумов корреляционных функций буксы и рельса в кадрах изображений судят об изменениях радиуса колеса, а, следовательно, и параметрах колеса. Скорость движения колеса определяют по величине горизонтального перемещения фрагмента изображения буксы, содержащего контрастные элементы, за определенный промежуток времени, а величину горизонтального перемещения фрагмента изображения буксы определяют по разности горизонтальных координат максимумов корреляционных функций, получаемых при корреляции эталонного фрагмента изображения буксы с изображениями в двух последовательных кадрах.
Достижение технического результата возможно благодаря удалению облучающей и приемной систем на значительное расстояние от железнодорожного полотна (рельса), импульсному характеру облучения с частотой, задаваемой в зависимости от скорости движения состава, корреляционным методам обработки информации, после чего просчитывают профиль всей контролируемой поверхности, исходя из вычисления координат максимумов корреляционной функции.
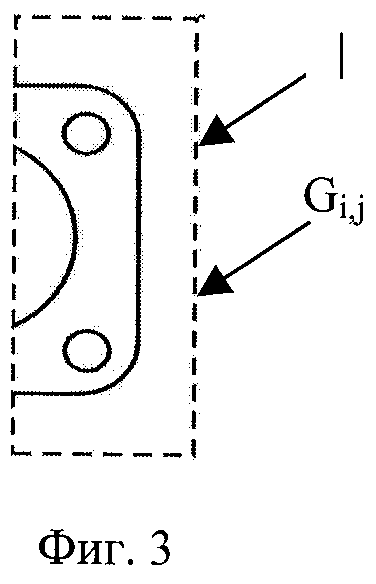
Сущность изобретения поясняется фиг.1-4, где на фиг.1 представлена схема устройства, реализующего заявляемый способ; на фиг.2 - изображение на приемнике излучения; на фиг.3 - эталонный фрагмент изображения буксы; на фиг.4 - эталонный фрагмент изображения рельса.
Реализация способа предлагается, например, в устройстве, представленном на фиг.1.
Колесо 1, параметры которого контролируются, связанное с буксой 2, катится по рельсу 3. На удалении от рельса располагается импульсный источник света 4 с формирователем светового потока 5 и матричный фотоприемник 6 с объективом 7 и оптическим фильтром 8. В поле зрения объектива 7 располагаются колесо 1 с буксой 2, рельс 3 с нанесенной контрастной линией 9. Выход матричного фотоприемника 6 соединен с входом устройства ввода 10. Выход устройства ввода 10 соединен с входом компьютера 11. Выход компьютера 11 подключен к входу устройства синхронизации 12. Первый выход устройства синхронизации 12 соединен с источником света 4, второй выход устройства синхронизации 12 соединен с входом управления фотоприемником 6.
Представленное на фиг.1 устройство работает в соответствии с заявляемым способом следующим образом.
Источник инфракрасного излучения 4, расположенный на удалении от железнодорожного пути, облучает импульсным потоком излучения колесо 1 с буксой 2 и рельс 3 с нанесенной контрастной меткой 9. Формирователь излучения 5 формирует диаграмму направленности потока излучения таким образом, чтобы букса 2 и рельс 3 с контрастной меткой 9 равномерно облучались на пути L, равном полной развертке поверхности катания колеса

где DK - диаметр колеса по поверхности катания.
Отраженное излучение от буксы 2 и рельса 3 с меткой 9 через оптический фильтр 8, блокирующий внешнюю паразитную засветку, с помощью объектива 7 проецируется на приемную площадку матричного приемника излучения камеры 6, расположенной рядом с источником излучения 4. Зарегистрированное за время импульса излучения изображение Fi,j с камеры 6 (фиг.2) считывается с помощью устройства ввода 10 в компьютер 11. В памяти компьютера 11 предварительно записаны эталонные фрагменты изображений Gi,j буксы 2 (фиг.3) и Hi,j рельса 3 с нанесенной контрастной меткой 9 (фиг.4). За время регистрации следующего кадра изображения в компьютере 11 производится корреляция [С.И.Баскаков. Радиотехнические цепи и сигналы. - М., Высшая школа, 1983] зарегистрированного цифрового изображения Fi,j с эталонным изображением Gi,j

где Kl,k - дискретная корреляционная функция;
l, k - координаты корреляционной функции;
i, j - координаты на изображении;
М×N - размеры эталонного изображения фрагмента буксы 2 в пикселях.
Также производится вычисление дискретной корреляционной функции  зарегистрированного изображения Fi,j с эталонным изображением Hi,j
зарегистрированного изображения Fi,j с эталонным изображением Hi,j
где - корреляционная функция, зависящая только от вертикальной координаты смещения рельса 3 с контрастной меткой 9;
q - вертикальная координата корреляционной функции;
А×В - размеры эталонного изображения фрагмента рельса 3 с контрастной меткой 9.
Контрастная метка наносится для увеличения остроты корреляционного пика.
Изменение вертикальной координаты Δkmax максимума корреляционной функции Кl,k прямо пропорционально изменению вертикального положения буксы

где α - коэффициент увеличения оптической системы.
В свою очередь, изменение вертикальной координаты буксы ΔyБ включает изменение радиуса колеса ΔRK в точке контакта колеса с рельсом и прогиб рельса в этой точке ΔyР.

Величина прогиба рельса ΔyР прямо пропорциональна изменению вертикальной координаты максимума корреляционной функции

Из выражений (4-6) определяется текущее изменение радиуса колеса ΔRК, обусловленное наличием дефектов формы колеса,

Аналогичные операции выполняются с последующими кадрами изображения колеса 1 с буксой 2 и рельса 3 с контрастной меткой 9, пока колесо 1 находится на участке L.
В процессе горизонтального движения буксы 2, связанного с движением состава и вертикального перемещения буксы относительно рельса 3, связанного с наличием дефектов колеса по результатам обработки всех кадров изображений Fi,j, полученных за время прохождения участка L, строится зависимость  , где ϕK - угол поворота колеса, ϕK принимает дискретные значения в диапазоне углов 0-360° с приращением
, где ϕK - угол поворота колеса, ϕK принимает дискретные значения в диапазоне углов 0-360° с приращением  , где n - количество кадров, зарегистрированных за время прохождения участка L; n - величина задаваемая и определяется минимальным размером определяемого дефекта колеса, обычно n≥50 [патент US № 20030103216].
, где n - количество кадров, зарегистрированных за время прохождения участка L; n - величина задаваемая и определяется минимальным размером определяемого дефекта колеса, обычно n≥50 [патент US № 20030103216].
Для того чтобы количество кадров n, необходимых для регистрации полной развертки колеса 1 по поверхности катания, было постоянным при разных скоростях железнодорожных составов, необходимо изменять частоту регистрируемых кадров fКД, a следовательно, и частоту импульсного облучения fи пропорционально скорости состава

где V - скорость состава;
Lкд - путь, проходимый составом за время между кадрами.
С достаточно большой точностью можно положить, что V=const на интервале L.
Скорость состава определяется по изменению горизонтальной координаты буксы 2 за время ΔT1,2 между первым и вторым кадрами изображений с камеры 6
где l1max, l2max - координаты максимумов корреляционной функции Кl,k по горизонтальной оси соответственно в первом и втором кадрах.
Время между кадрами ΔT1,2 определяется начальной средней частотой кадров

где  , где Vср - средняя скорость движения составов на контрольном участке (определяется на основе статистических данных).
, где Vср - средняя скорость движения составов на контрольном участке (определяется на основе статистических данных).
Длительность импульсов облучения от источника 4 устанавливается из условия минимального смаза изображения в камере (1 пиксел).
Таким образом, в компьютере 11 за время первого и второго кадров происходит определение скорости V состава на контрольном участке. После определения скорости V состава компьютер 11 выдает запускающие сигналы на устройство синхронизации 12 с частотой, пропорциональной скорости V, в соответствии с (8).
Устройство синхронизации 12 формирует по длительности и уровню импульсы внешнего запуска камеры 6 и источника инфракрасного излучения 4, причем импульсы излучения формируются во время накопления сигнала на камере 6.
В качестве матричного приемника излучения 6 в устройстве может быть использована ПЗС - камера Hitachi KP-M1AP, разрешением 795×596 пикселей, с размером пикселя 11×11 мкм. Для регистрации инфракрасного сигнала необходимо удалить оптический фильтр, установленный в камере перед фотоприемной матрицей. Камера может быть установлена на расстоянии примерно 6 м от железнодорожного пути.
В качестве устройства ввода 10 может быть использован фреймграббер Leutron Vision PicPort Mono H4.
Источник излучения 4 может быть выполнен на инфракрасных диодах типа ИКП-84/30-940 [http://microvideo.ru/ir/illuminators/illum_ikp84_940.htm] с длиной волны излучения 940 нм, включающих в себя формирователь потока излучения 5.
Фильтр инфракрасного излучения, уменьшающий внешнюю паразитную засветку, можно изготовить из стекла марки КС-19.
Устройство синхронизации 12 может быть выполнено на таймерах типа КР1006ВИ1, ТУ11-БКО.384.685ТУ-85 [http://www.vniiki.ni/].
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКТАЦИИ ЖЕЛЕЗНОДОРОЖНОГО КОЛЕСА СРЕДСТВАМИ АВТОМАТИЧЕСКОЙ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ | 2015 |
|
RU2606410C2 |
| СПОСОБ БЕСКОНТАКТНОГО ДИНАМИЧЕСКОГО КОНТРОЛЯ ИЗНОСА КОЛЕС ПОДВИЖНОГО СОСТАВА | 1998 |
|
RU2147729C1 |
| Устройство определения параметров узлов подвижного состава | 2016 |
|
RU2668774C2 |
| СПОСОБ МОНИТОРИНГА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО ПУТИ | 2000 |
|
RU2180300C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТИ ЭЛЕМЕНТОВ КОЛЕСНОГО УЗЛА | 1996 |
|
RU2126754C1 |
| СПОСОБ МОНИТОРИНГА ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО РЕЛЬСОВОГО ПУТИ | 2003 |
|
RU2266226C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2002 |
|
RU2244904C2 |
| ОПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2013 |
|
RU2518078C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЦЕЛЕЙ НА ОСНОВЕ РЕГИСТРАЦИИ И ОБРАБОТКИ ХОДА ЛУЧЕЙ ОТ ОБЪЕКТОВ В НАБЛЮДАЕМОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2760845C1 |


Изобретение относится к области измерительной техники и может быть использовано для контроля технического состояния колес 1 рельсового подвижного состава. Способ бесконтактного динамического контроля параметров колес подвижного состава заключается в том, что буксу 1 контролируемого колеса и рельс 3 с контрастной меткой 9 облучают потоком излучения, принимают отраженную картину приемником излучения, при этом излучатель и матричный приемник помещают на удалении от рельсового пути. Буксу и рельс облучают потоком излучения в виде последовательности коротких импульсов с частотой, пропорциональной скорости движения колеса. Определяют положение максимумов корреляционных функций, получаемых при корреляции эталонного фрагмента изображения соответственно буксы или метки рельса с изображением в текущем кадре; по изменению вертикальных координат максимумов корреляционных функций буксы и рельса в кадрах изображений судят об изменениях радиуса и параметров колеса. Изобретение повышает надежность и расширяет функциональные возможности. 1 з.п. ф-лы, 4 ил.
| СПОСОБ БЕСКОНТАКТНОГО ДИНАМИЧЕСКОГО КОНТРОЛЯ ИЗНОСА КОЛЕС ПОДВИЖНОГО СОСТАВА | 1998 |
|
RU2147729C1 |

