Изобретение относится к измерительной технике и может быть использовано при разработке акселерометров.
Известен способ измерения ускорений, в частности проекций ускорений, действующих по трем взаимно перпендикулярным осям, основанный на микроизгибной модуляции величины интенсивности света в отрезках волокна при отсутствии или наличии механического воздействия на отрезки волокна со стороны инерционной массы [патент RU N 2010235 Cl, G 01 P 15/08 "Волоконно-оптический акселерометр"]. Деформации волокна приводят к тому, что световые моды высших порядков сердцевины волокна начинают пересекать поверхность "сердцевина-оболочка", при этом интенсивность светового излучения на выходе оптического волокна становится пропорциональной деформации волокна.
Недостаток указанного способа в низкой надежности, которая обусловлена тем, что многократные реверсивные изгибные деформации волокна ведут к появлению микротрещин в нем, снижению его светопропускающей способности и разрушению.
Известен способ измерения ускорений, при котором акселерометр выполнен в виде простого гармонического осциллятора, содержащего массу, взвешенную между двумя волокнами [Световодные датчики /Б.А.Красюк, О.Г.Семенов, А.Г.Шерементьев и др. - М. : Машиностроение, 1990, с.240]. В случае воздействия в выбранном направлении ускорения световоды испытывают деформацию ΔL. Измерение столь малых приращений оптического пути осуществляется при использовании интерферометра Маха-Зендера.
Недостатки высокочувствительных интерферометрических основанных на оптической фазовой модуляции способов измерения ускорений проявляются при измерении на постоянном сигнале. Низкочастотные шумы и температурные изменения могут существенно ухудшать их характеристики, особенно при эксплуатации в жестких условиях.
Суть способа измерения вектора ускорения, выбранного за прототип, состоит в том, что измеряют перемещения по трем взаимно перпендикулярным направлениям взвешенных в среде микрочастиц, используют оптически активные с разной плотностью по своему объему микрочастицы, поддерживают постоянство температуры среды во время измерения и по изменению оптических свойств среды, вызванному переориентацией частиц при действии ускорения, судят о действующем ускорении [патент SU N 501354 A1 G 01 P 15/00, С.Ф.Головин, В.А.Шварц "Способ измерения вектора ускорения"].
Недостаток данного способа заключается в его сложности, отсутствии преемственности наблюдаемых картин распределения взвешенных частиц, невозможности точного определения точек приложения измеряемых векторов ускорений, сложности градуировки средства измерения ускорения по этому способу, т.e. он не позволяет достичь технического результата, выраженного в повышении точности, преемственности и надежности измерения параметров векторов ускорений.
Указанный технический результат достигается способом измерения параметров векторов ускорений, в котором перемещение инерционной массы преобразуют в параметры светового потока, а в качестве инерционной массы используют шаровую линзу, взвешенную с помощью упругой среды, измеряют освещенности E0, Ex, Ey, Ez, постоянно контролируют скорость изменения относительной освещенности  и для момента времени, когда скорость изменения относительной освещенности равна нулю, регистрируют относительную освещенность E/E0, по полученным данным судят о величине, направлении и координатах точки приложения вектора ускорения
и для момента времени, когда скорость изменения относительной освещенности равна нулю, регистрируют относительную освещенность E/E0, по полученным данным судят о величине, направлении и координатах точки приложения вектора ускорения  используя зависимость относительной освещенности от измеряемого ускорения
используя зависимость относительной освещенности от измеряемого ускорения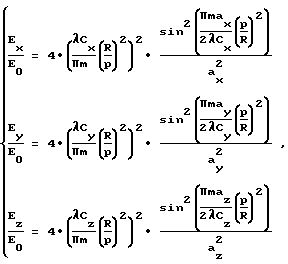
где Ex, Ey, Ez - освещенность в точках на оптической оси вблизи фокуса линзы, соответствующая величинам Δx,Δy,Δz относительного перемещения линзы для момента времени, когда скорость изменения относительной освещенности равна нулю 
E0 - освещенность в точке пересечения фокальной плоскости с оптической осью линзы;
λ - длина волны света источника излучения;
Сx, Сy, Cz - жесткость упругой среды по соответствующим осям;
m - масса линзы; проекции измеряемого вектора ускорения
проекции измеряемого вектора ускорения  соответственно по осям x, у, z;
соответственно по осям x, у, z;
p/R - половина относительного отверстия линзы, где p - радиус выходного зрачка линзы; R - радиус сферической поверхности линзы;
по результатам измерений относительных изменений освещенности  выделяют вектор приращения ускорения
выделяют вектор приращения ускорения  за выбранный интервал времени Т и вектор ускорения
за выбранный интервал времени Т и вектор ускорения  в конце периода Т и определяют величину, направление и координаты точек приложения векторов ускорения
в конце периода Т и определяют величину, направление и координаты точек приложения векторов ускорения  осуществляют контроль за величиной, направлением, скоростью и ускорением изменения параметров векторов ускорений.
осуществляют контроль за величиной, направлением, скоростью и ускорением изменения параметров векторов ускорений.
Введение совокупности новых признаков позволяет повысить точность, преемственность и надежность измерения параметров векторов ускорений. В процессе поиска по источникам научно-технической и патентной информации не было найдено совокупности существенных признаков, обеспечивающей достижение указанного технического результата, таким образом, предлагаемое техническое решение является новым, обладает промышленной применимостью и изобретательским уровнем.
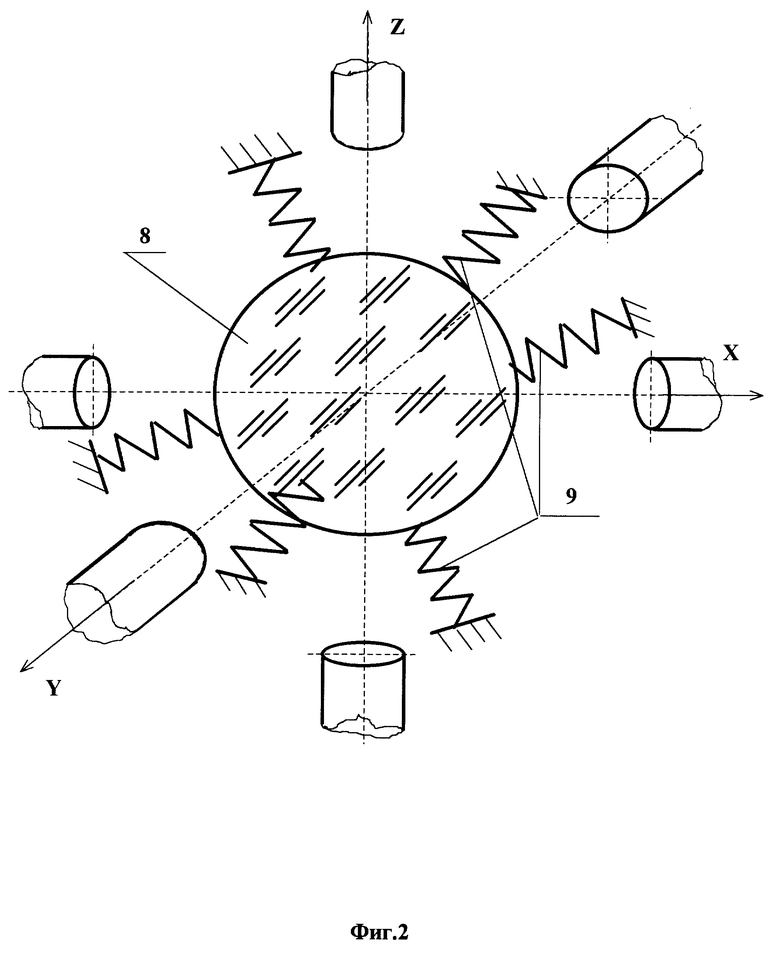
Предлагаемый способ реализуют с помощью устройства, предназначенного для измерения параметров вектора ускорения. Структурная схема одного канала устройства представлена на фиг. 1; схема устройства чувствительного элемента (ЧЭ) - на фиг. 2.
Устройство содержит (фиг.1) источник излучения 1, коллиматор 2, чувствительный элемент 3, приемник излучения 4, устройство сопряжения 5, регистрирующее устройство 6 (ЭВМ с встроенным таймером 7). Роль ЧЭ (фиг. 2) выполняет инерционная масса, представляющая собой линзу 8 (например, шаровую, выполненную из кварцевого стекла с малым коэффициентом температурного расширения), взвешенную с помощью упругих элементов 9 (упругой среды). Остальные каналы имеют аналогичный состав. Для осуществления способа измерения устройство жестко закрепляют на объекте.
Световой поток формируют источником излучения 1 и направляют посредством коллиматора 2 на чувствительный элемент 3, который имеет возможность совершать ограниченные перемещения, при этом деформируя упругую среду. Пронизывая линзу в трех взаимно перпендикулярных направлениях оптическими потоками, получают возможность контролировать параметры векторов ускорений (величину, направление и координаты точки приложения вектора ускорения, скорость и ускорение их изменения) в выбранной инерциальной системе отсчета.
Записывают систему уравнений
где Δx,Δy,Δz - проекции относительного перемещения линзы;
Cx, Cy, Cz - жесткость по соответствующим осям;
Fx и, Fy и, Fz и - проекции силы инерции;
Fx у, Fy у, Fz у - проекции силы упругости;
m - масса ЧЭ,
из которой получают систему уравнений для момента, когда силы инерции уравновешены силами упругости (Fи = Fу) (2)
(2)
Далее используют выражения [Тудоровский A.И. Теория оптических приборов. - М.-Л.: Изд-во АН СССР, 1947, ч. 1, с. 601-610] (3)
(3)
где E0 - освещенность в точке пересечения фокальной плоскости с оптической осью линзы;
E - освещенность в точках на оптической оси вблизи фокуса линзы в зависимости от расстояния Δ от фокальной плоскости; (4)
(4)
где P - промежуточная функция;
Δ - расстояние от фокальной плоскости вдоль оптической оси линзы;
λ - длина волны света;
p/R - половина относительного отверстия линзы, где p - радиус выходного зрачка линзы; R - радиус сферической поверхности линзы;
выводят зависимость относительной освещенности от измеряемого ускорения E/E0~ a(t). Для этого выражения (2) подставляют в выражение (4) вместо Δ и получают следующие выражения: (5)
(5)
Подставляя выражения (5) в выражение (3) получают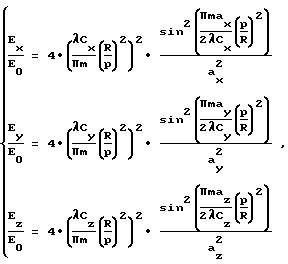 (6)
(6)
где Ex, Ey, Ez - освещенность в точках на оптической оси вблизи фокуса линзы, соответствующая величинам Δx,Δy,Δz - относительного перемещения линзы для момента времени, когда скорость изменения относительной освещенности равна нулю.
Способ измерения параметров векторов ускорений реализуют следующим образом.
В качестве инерционной массы используют шаровую линзу, взвешенную с помощью упругой среды.
Измеряют освещенности E0, Ex, Ey, Ez.
По результатам измерений регистрируют относительные освещенности Ex/E0, Ey/E0, Ez/E0 для соответствующих моментов времени.
Контролируют скорость изменения относительной освещенности, определяя первую производную относительного изменения освещенности по времени 
где ΔE = E(t+Δt)-Et - изменение освещенности за интервал времени Δt _→ 0;
E0 - освещенность в точке пересечения фокальной плоскости с оптической осью линзы при условии, что относительное смещение линзы равно нулю;
и для момента времени, когда скорость изменения относительной освещенности равна нулю, регистрируют соответствующие относительные освещенности в проекциях по осям x, у, z, пропорциональные измеряемому ускорению, по полученным данным судят о величине, направлении и координатах точки приложения вектора ускорения  используя зависимость относительной освещенности от измеряемого ускорения E/E0~a(t):
используя зависимость относительной освещенности от измеряемого ускорения E/E0~a(t):
где Ex, Ey, Ez - освещенность в точках на оптической оси вблизи фокуса линзы, соответствующая величинам Δx,Δy,Δz относительного перемещения линзы для момента времени, когда скорость изменения относительной освещенности равна нулю 
E0 - освещенность в точке пересечения фокальной плоскости с оптической осью линзы;
λ - - длина волны света источника излучения;
Сx, Сy, Сz - жесткость упругой среды по соответствующим осям;
m - масса линзы; проекции измеряемого вектора ускорения
проекции измеряемого вектора ускорения  соответственно по осям x, у, z;
соответственно по осям x, у, z;
p/R - половина относительного отверстия линзы, где p - радиус выходного зрачка линзы; R - радиус сферической поверхности линзы.
Абсолютную величину вектора  определяют через его проекции
определяют через его проекции  c помощью выражения
c помощью выражения (7)
(7)
Направление вектора ускорения определяют, используя выражения направляющих косинусов по осям у, z аналогично.(8)
по осям у, z аналогично.(8)
Теперь, когда известны  определяют, используя выражения (2), Δx,Δy,Δz - проекции относительного смещения линзы. Полученные таким образом координаты центра масс линзы интерпретируют как точку приложения данного вектора ускорения в выбранной инерциальной системе отсчета.
определяют, используя выражения (2), Δx,Δy,Δz - проекции относительного смещения линзы. Полученные таким образом координаты центра масс линзы интерпретируют как точку приложения данного вектора ускорения в выбранной инерциальной системе отсчета.
Определяют относительные изменения освещенности, пропорциональные изменению ускорения за время Т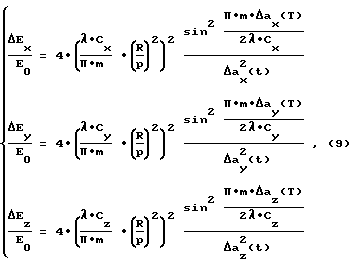
где Т - интервал времени между моментами измерения ускорений, в которые скорость изменения относительной освещенности равна нулю
Затем по известным  используя выражение (7), определяют
используя выражение (7), определяют 
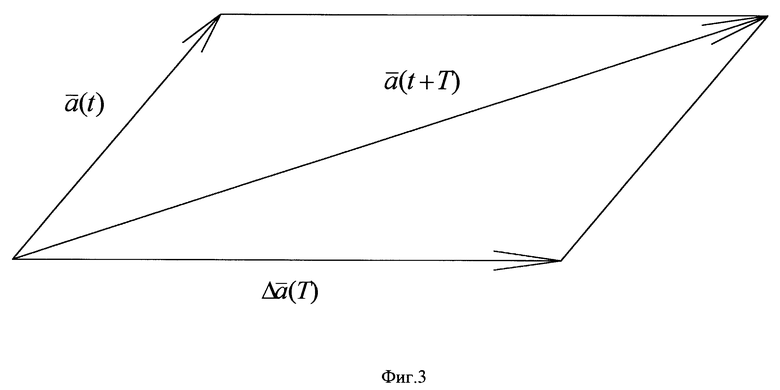
Производят сложение векторов  и
и  (фиг. 3)
(фиг. 3) (10)
(10)
где  измеряемый вектор ускорения в начале периода времени Т;
измеряемый вектор ускорения в начале периода времени Т; измеряемый вектор ускорения в конце периода Т;
измеряемый вектор ускорения в конце периода Т; вектор изменения ускорения за период Т, параметры которого определяют путем вычислений, приведенных ранее.
вектор изменения ускорения за период Т, параметры которого определяют путем вычислений, приведенных ранее.
Контроль за выполнением равенства  позволяет повысить достоверность результатов измерений.
позволяет повысить достоверность результатов измерений.
Исследование системы дифференциальных уравнений, описывающих работу ЧЭ акселерометра, позволяет на стадии проектирования подобрать источник, приемник излучения и конструктивные параметры ЧЭ, оптимальные для предполагаемых условий эксплуатации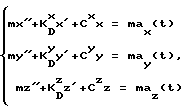
где x,x', x'', y,y',y'', z,z',z'' - соответственно перемещение, скорость и ускорение ЧЭ акселерометра-линзы по осям x, у, z;
m, C, KD - соответственно масса, жесткость и коэффициент демпфирования;
a(t) - измеряемое ускорение.
Устройство, реализующее предлагаемый способ, может быть выполнено с использованием в качестве элементов:
источника излучения - светодиода 3Л 107Б;
коллиматора;
шаровой кварцевой или волноводных оптических микролинз;
приемника излучения - фотодиода ФД 256;
ЭВМ на базе IВМ486.
Использование предлагаемого способа позволяет:
определять величину, направление и координаты точки приложения вектора ускорения, скорость и ускорение их изменения;
регистрировать параметры вектора приращения измеряемого ускорения за выбранный интервал времени;
обеспечивать возможность создания простых, малогабаритных, дешевых и надежных волоконно-оптических акселерометров с возможностью их использования в составе волоконно-оптических сетей сбора данных со спектральным мультиплексированием.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ | 2001 |
|
RU2206737C1 |
| СПОСОБ НАСТРОЙКИ ИНКЛИНОМЕТРА И КОНТРОЛЯ ДОСТОВЕРНОСТИ РЕЗУЛЬТАТОВ | 1994 |
|
RU2085852C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2000 |
|
RU2170447C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2658124C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2021 |
|
RU2766833C1 |
| СПОСОБ ПОЛЕВОЙ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА | 2018 |
|
RU2674535C1 |
| СПОСОБ КОНТРОЛЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩЕЙСЯ НИТИ | 1996 |
|
RU2138588C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2556286C1 |
Способ предназначен для разработки акселерометров. Способ заключается в том, что контролируют скорость изменения относительной освещенности. Регистрируют относительную освещенность и по полученным данным судят о параметрах векторов ускорений. Выделяют вектор приращения ускорения за интервал времени. Осуществляют контроль за величиной, направлением, скоростью и ускорением изменения параметров векторов ускорений. Обеспечивается повышение точности, преемственности и надежности измерения параметров векторов ускорений, а также возможность создания волоконно-оптических акселерометров для волоконно-оптических сетей сбора данных. 3 ил.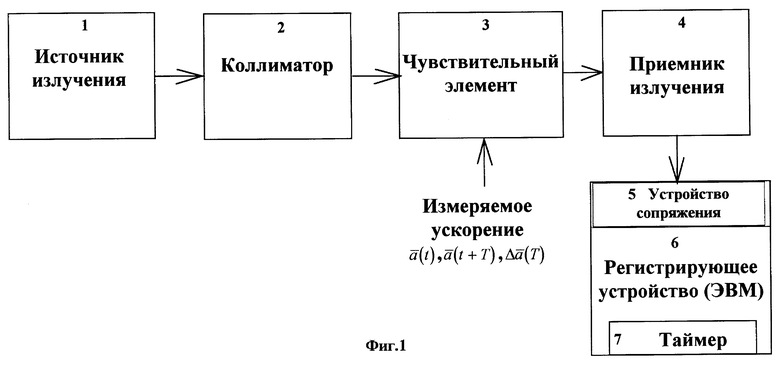
Способ измерения параметров вектора ускорения, заключающийся в том, что перемещение инерционной массы преобразуют в параметры светового потока, отличающийся тем, что в качестве инерционной массы используют шаровую линзу, взвешенную с помощью упругой среды, измеряют освещенности E0, Ex, Ey, Ez, постоянно контролируют скорость изменения относительной освещенности  и для момента времени, когда скорость изменения относительной освещенности равна нулю, регистрируют относительную освещенность E/E0, по полученным данным судят о величине, направлении и координатах точки приложения вектора ускорения
и для момента времени, когда скорость изменения относительной освещенности равна нулю, регистрируют относительную освещенность E/E0, по полученным данным судят о величине, направлении и координатах точки приложения вектора ускорения  используя зависимость относительной освещенности от измеряемого ускорения
используя зависимость относительной освещенности от измеряемого ускорения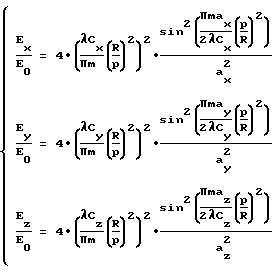
где Ex, Ey, Ez - освещенность в точках на оптической оси вблизи фокуса линзы, соответствующая величинам Δx, Δy, Δz относительного перемещения линзы для момента времени, когда скорость изменения относительной освещенности равна нулю  ;
;
E0 - освещенность в точке пересечения фокальной плоскости с оптической осью линзы;
λ - длина волны света источника излучения;
Cx, Cy, Cz - жесткость упругой среды по соответствующим осям;
m - масса линзы; проекции измеряемого вектора ускорения
проекции измеряемого вектора ускорения  соответственно по осям x, y, z;
соответственно по осям x, y, z;
p/R - половина относительного отверстия линзы, где p - радиус выходного зрачка линзы;
R - радиус сферической поверхности линзы,
по результатам измерений относительных изменений освещенности  выделяют вектор приращения ускорения
выделяют вектор приращения ускорения  за выбранный интервал времени T и вектор ускорения
за выбранный интервал времени T и вектор ускорения  в конце периода T и определяют величину, направление и координаты точек приложения векторов ускорения
в конце периода T и определяют величину, направление и координаты точек приложения векторов ускорения  осуществляют контроль за величиной, направлением, скоростью и ускорением параметров векторов ускорений.
осуществляют контроль за величиной, направлением, скоростью и ускорением параметров векторов ускорений.
| FR 1573932 A, 02.06.1969 | |||
| Устройство для измерения ускорения | 1990 |
|
SU1760461A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Способ измерения механических величин | 1983 |
|
SU1167506A1 |
