Изобретение относится к измерительной технике, а именно к способам измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами применительно к навигации подвижных объектов и может быть использовано для беспилотных летательных аппаратов, для прокладки нефтяных и газовых скважин и различных подземных туннелей.
Известен способ определения направления на север с помощью микромеханического гироскопа [1]. Согласно данному способу размещают одноосный микромеханический гироскоп и одноосный микромеханический акселерометр таком образом, их оси чувствительности находятся в одной плоскости перпендикулярно друг к другу вдоль осей x и y, а вокруг оси z, перпендикулярной плоскости, производят вращение гироскопа и акселерометра. Вращение гироскопа позволяет уменьшить систематические погрешности гироскопа и повысить соотношение сигнал — шум. С помощью акселерометра определяют точное угловое положение гироскопа при его вращении. Кроме того, для повышения точности измерения применяют метод фильтрации Калмана и метод наименьших квадратов. Однако с помощью такого способа определяют только один угол направления на север, при этом нет информации об угле тангажа и крена движущегося объекта, кроме того неизвестны проекции вектора ускорения, действующие на ортогональные оси подвижного объекта. Также в способе не заложена избыточность в получении информации, когда выход из строя, например, акселерометра, приводит к остановке процесса измерений. Поэтому данный способ мало пригоден для получения полной навигации движущегося объекта.
Известен способ автокомпенсации независимых от ускорения дрейфов гироскопического устройства [2]. Согласно этому способу кардановый подвес гироскопического устройства совместно с триадой акселерометров вращают двигателем вокруг вектора кинетического момента, угловое положение подвеса фиксируют датчиком угла, причем вращение подвеса происходит на рассчитанный угол, когда параметр N, определенный при математической обработке сигналов гироскопа, акселерометров и датчика угла, превысит значение определенного порога. При этом снижаются погрешности в работе гироскопа, вызванные вращением объекта, на котором установлен подвес, вокруг вектора кинетического момента гироскопа. Недостатком данного способа является наличие погрешности в работе гироскопа, которая, после поворота подвеса на рассчитанный угол, падает до нуля, а затем возрастает вновь до некоторого уровня, при котором параметр N достигает порога.
Известен способ измерений параметров угловой скорости и ускорения от двух блоков микромеханических гироскопов при решении задачи ориентации [3], взятый за прототип. Согласно данному способу, на борту подвижного объекта устанавливают три модуля, причем первый и второй модуль содержат триаду гироскопов, третий модуль содержит триаду акселерометров, при этом первые два модуля вращают вокруг осей, измеряют углы поворота модулей, а сами оси располагают перпендикулярно друг к другу, третий модуль неподвижно закрепляют на объекте, в процессе движения объекта для каждого модуля находят по их выходным сигналам параметры ориентации, затем, используя уравнение ошибок и фильтра Калмана, корректируют параметры ориентации второго модуля, после чего, на основе интегрированных показаний акселерометров, находят углы ориентации объекта курса, тангажа и крена. Применение данного способа снижает требования к точности измерений углов поворота при вращении первых двух модулей, что повышает точность ориентации объекта.
Недостатком прототипа являются погрешности ориентации объекта вызванные уменьшенной, но существующей погрешностью в определении угла поворота модулей, а также влиянием угловой скорости вращающегося модуля на результат вычисления параметров ориентации объекта. Кроме того, непрерывное вращение модулей требует дополнительных операций для передачи информации с вращающегося модуля на объект. Обычно при этом используют скользящие контакты, которые недолговечны и ненадежны.
Заявленное изобретение решает задачу снижения погрешности измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами.
Техническим результатом заявленного изобретения является повышение точности определения навигационных параметров и параметров ориентации подвижных объектов.
Для решения поставленной задачи в способ измерений параметров угловой скорости и ускорения от двух блоков микромеханических гироскопов при решении задачи ориентации, согласно которому на борту подвижного объекта устанавливают три модуля, причем первый и второй модули содержат триаду гироскопов, а третий модуль содержит триаду акселерометров, причем первые два модуля вращают вокруг осей, которые располагают перпендикулярно друг к другу, а третий модуль неподвижно закрепляют на объекте, введены действия, согласно которым применяют четыре одинаковых микромеханических модуля, каждый из которых имеет три оси чувствительности по угловой скорости и ускорению, лежащие вдоль осей ортогональной системы координат объекта, причем первый модуль поворачивают вокруг оси z, второй модуль поворачивают вокруг оси y, третий модуль поворачивают вокруг оси x, при этом поворот вокруг осей происходит в диапазоне от 0° до 270° и назад от 270° до 0° с четырьмя остановками через 90°, на которых фиксируют измеряемые величины, при этом получают проекции величин на ортогональные оси
при вращении вокруг оси z
Wxz = (Wx1z + Wy2z – Wx3z – Wy4z) / 4
Wyz = (Wy1z – Wx2z – Wy3z + Wx4z) / 4
вокруг оси y
Wxy = (Wx1y + Wz2y – Wx3y – Wz4y) / 4
Wzy = (Wz1y – Wx2y – Wz3y – + Wx4y) / 4
вокруг оси x
Wyx = (Wy1x + Wz2x – Wy3x – Wz4x) / 4
Wzx = (Wz1x – Wy2x – Wz3x + Wy4x) / 4
после чего находят проекции величин на ортогональные оси

Затем полученными значениями величин от трех подвижных модулей корректируют во время остановок выходные значения величин четвертого модуля, закрепленного неподвижно на корпусе объекта, при этом получают коррекцию дрейфа нуля выходных сигналов четвертого модуля, работающего в режиме непрерывного реального времени, чем обеспечивают непрерывную ориентацию и навигацию по проекциям на три ортогональные оси объекта величин его угловой скорости и ускорения.
В обозначениях величины, например, Wxz, первый индекс (x) обозначает на какую ось имеет место проекция величины, а второй индекс обозначает вокруг какой оси вращается модуль. При трех индексах в середине имеет место цифра, которая означает угол поворота модуля: 1 – 0°, 2 – 90°, 3 – 180°, 4 – 270°.
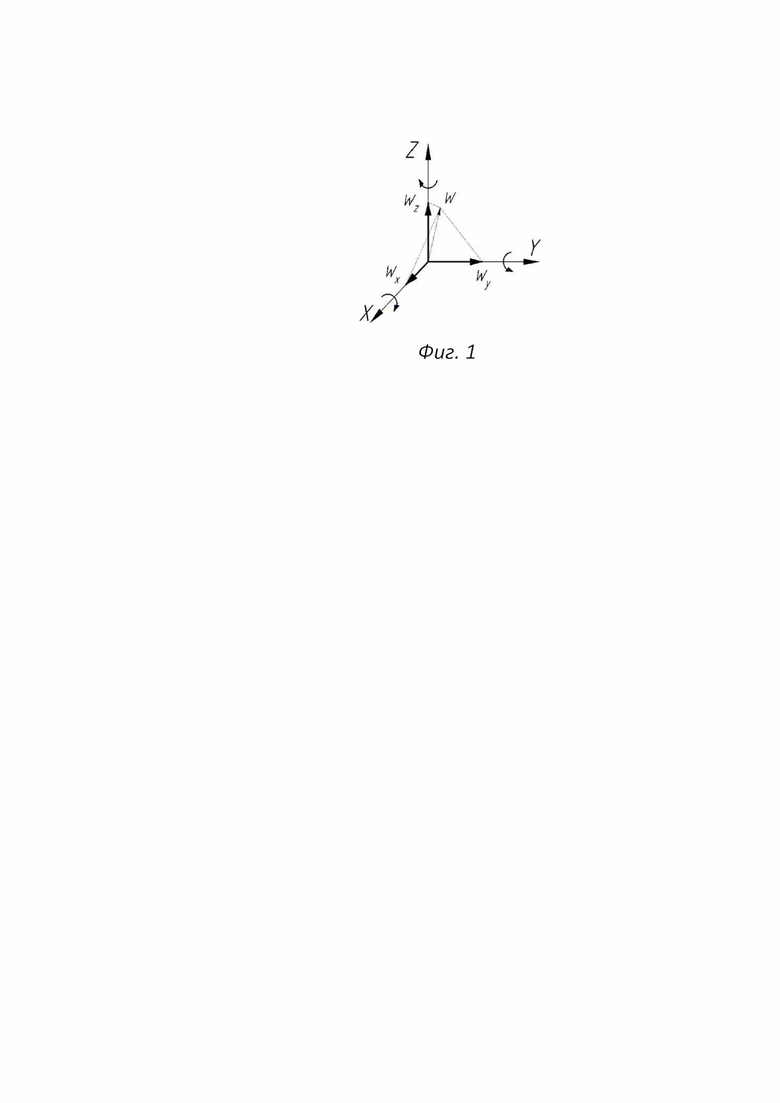
Сущность предполагаемого изобретения поясняется Фиг. 1, на которой показана система ортогональных осей модуля, стрелками указаны направления вращения модуля, W – вектор измеряемой величины, Wx, Wy, Wz – проекции вектора W на оси x, y, z.
На Фиг. 1 показано начальное положение модуля при угле поворота осей равным 0°. При повороте модуля на углы 90, 180, 270° вокруг, например, оси z, оси x и y последовательно меняются местами, причем при развороте осей x, y на 180° знак проекции величины W изменяется на противоположный.
Реально модули измеряют проекции величин на оси с систематической погрешностью, вызванной смещением нуля выходного сигнала каждого измерителя. При этом имеет место
Wx1z = Wx + Δx, Wy2z = Wx + Δy, Wx3y = - Wx + Δx, Wy4z = - Wx + Δy,
где: Δx, Δy – уходы нуля измерителей на осях x и y.
При подстановке этих величин в указанные выше выражения получают
Wxz = 4 Wx / 4 = Wx
Аналогично
Wyz = 4 Wy / 4 = Wy; Wxy = Wxx : Wzy = Wz : Wyx =Wy : Wzx = Wz
Wx = 8 Wx / 8 = Wx Wy = 8 Wy / 8 = Wy Wz = 8 Wz / 8 = Wz
Таким образом, согласно предложенному способу в моменты остановок при поворотах модулей получают измерения проекций величины W на оси x, y, z с исключенными систематическими погрешностями.
Кроме систематических погрешностей в выходных сигналах модулей присутствуют случайные погрешности σx, y, z, вызванные собственными шумами в сигналах модуля и разбросом по углу поворота при остановке модулей. Тогда проекция вектора величины W на ось x имеет вид
Wx1z = Wx + Δx + σx, Wy2z = Wx + Δy + σy; Wx3z = - Wx + Δx + σx; Wy4z = - Wx + Δy + σy
Однако при их сложении согласно формулам (1) случайные величины с нормальным распределением складываются через корень квадратный из суммы квадратов среднеквадратичных отклонений. При этом измеренное значение проекции равно
Wx0 = Wx + √σx2 + σy2 + σx2 + σy2 + σz2 + σz2 / 8
при σx ≈ σy ≈ σz ≈ σ проекции величин на оси равны
Wx’ = Wx + 2,83 σ / 8 = Wx + 0.35 σ1, Wy’ = Wy + 0,35 σ; Wz’ = Wz + 0,35 σ. (2)
В результате чего при остановках модулей получают измерения, в которых случайная составляющая погрешности уменьшена почти в три раза. При этом, после каждого поворота модулей на 90° в выражениях (1) изменяются только две величины из восьми, расположенных в скобках. Одновременно подсчитывают величины проекции Wx’, Wy’, Wz’, в результате чего при поворотах на 90° длительностью 1 с получают готовую информацию с частотой следования 1 Гц.
Полученными данными Wx’, Wy’, Wz’ во время остановок корректируют выходные сигналы четвертого модуля Wx’’, Wy’’, Wz’’ согласно формулам
Затем во время поворота модулей на следующие 90° изменяют показания четвертого модуля
Таким образом, согласно заявленному способу имеется непрерывная информация в проекциях векторов угловой скорости и ускорения на ортогональные оси, из которой удалены систематические погрешности измерений четвертого модуля.
Используя полученные данные на остановках вращения модулей (2) производят ориентацию объекта, рассчитывая углы крена, рысканья и тангажа. А при использовании скорректированных величин четвертого модуля путем их интегрирования получают параметры навигации объекта.
По сравнению с прототипом заявленный способ не требует наличия скользящих контактов для передачи информации, т.к. используют гибкие проводники для поворотов на ± 135°, что значительно повышает надежность работ. Также в заявленном способе отсутствуют погрешности, вызванные угловой скоростью вращающегося модуля, т.к. измерения производят во время остановок поворота модуля. Кроме того, в заявленном способе нет необходимости в датчике угла поворота модуля и отсутствуют погрешности определения углового положения модулей, т.к. каждый модуль предварительно калибруют при разворотах на 90° на специальном стенде, определяя углы поворота модуля на 0°, 90°, 180°, 270°, а затем при функционировании модуля, делят его показания на Cos этих углов.
В результате чего заявленный способ существенно повышает точность ориентации и навигации по сравнению с прототипом.
Список литературы
1. Zhang Y, Zhou B, Song M, Hou B, Xing H, Zhang R. A Novel MEMS Gyro North Finder Design Based on the Rotation Modulation Technique. Sensors (Basel). 2017 Apr 28;17(5):973. doi: 10.3390/s17050973. PMID: 28452936; PMCID: PMC5464685.
2. Патент 2015/32006/28 от 31.07.2015 г. «Способ автокомпенсации независящих от ускорения дрейфов гироскопического устройства. Авторы: Биндер Я.Н., Лысенко А.С.
3. Ц. Лян, Ю.А. Литвиненко, О.А. Степанов «Метод обработки измерений от двух блоков микромеханических гироскопов при решении задачи ориентации». Гироскопия и навигация. Том 26. № 2 (161), 2018 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2024 |
|
RU2831095C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ НА МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2577567C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе | 2022 |
|
RU2794283C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2205367C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
Изобретение относится к измерительной технике. Сущность изобретения заключается в том, что в способе измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами отсутствуют погрешности, вызванные угловой скоростью вращающегося модуля, так как измерения производят во время остановок поворота модуля. При этом отсутствует необходимость в датчике угла поворота модуля и отсутствуют погрешности определения углового положения модулей, поскольку каждый модуль предварительно калибруют при разворотах на 90° на стенде, определяя углы поворота модуля на 0°, 90°, 180°, 270°, а затем при функционировании модуля делят его показания на Cos этих углов. Техническим результатом заявленного изобретения является повышение точности определения навигационных параметров и параметров ориентации подвижных объектов. 1 ил.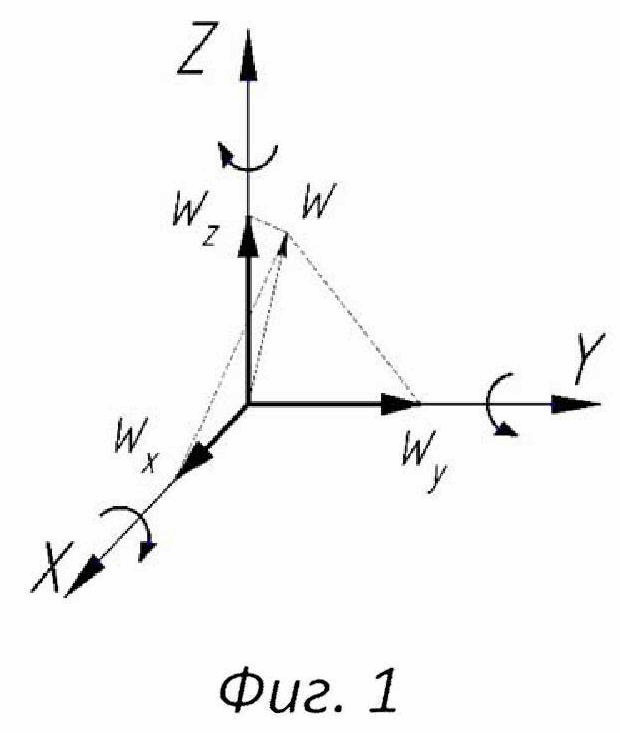
Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами, согласно которому на борту подвижного объекта устанавливают три модуля, причем первый и второй модули содержат триады гироскопов, а третий модуль содержит триаду акселерометров, при этом первые два модуля вращают вокруг осей, которые располагают перпендикулярно друг другу, а третий модуль неподвижно закрепляют на объекте, отличающийся тем, что применяют четыре одинаковых микромеханических модуля, каждый из которых имеет три оси чувствительности по угловой скорости и ускорению, лежащие вдоль осей ортогональной системы координат объекта, причем первый модуль поворачивают вокруг оси z, второй модуль поворачивают вокруг оси y, третий модуль поворачивают вокруг оси x, при этом поворот вокруг осей происходит в диапазоне от 0° до 270° и назад от 270° до 0° с четырьмя остановками через 90°, на которых фиксируют измеряемые величины, при этом получают проекции величин на ортогональные оси при вращении вокруг оси z
Wxz = (Wx1z + Wy2z – Wx3z – Wx4z) / 4
Wyz = (Wy1z – Wx2z – Wy3z + Wx4z) / 4
вокруг оси y
Wxy = (Wx1y + Wz2y – Wx3y – Wz4y) / 4
Wzy = (Wz1y – Wx2y – Wz3y +Wx4y) / 4
вокруг оси x
Wyz = (Wy1x + Wz2x – Wy3x – Xz4x) / 4
Wzx – (Wz1x – Wy2x – Wz3x + Wy4x) / 4,
после чего находят проекции величин на ортогональные оси

затем полученными значениями величин от трех подвижных модулей корректируют во время остановок выходные значения величины четвертого модуля, закрепленного неподвижно на корпусе объекта, при этом получают коррекцию дрейфа нуля выходных сигналов четвертого модуля, работающего в режиме непрерывного реального времени, и обеспечивают непрерывную навигацию по проекциям на три ортогональные оси объекта величин его угловой скорости и ускорения.
| Ц | |||
| Лян, Ю.А | |||
| Литвиненко, О.А | |||
| Степанов "Метод обработки измерений от двух блоков микромеханических гироскопов при решении задачи ориентации" | |||
| Гироскопия и навигация | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Солесос | 1922 |
|
SU29A1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| US 2011264393 A1, 27.10.2011. | |||

