Изобретение относится к области комплексного полетного контроля систем автоматического управления летательными аппаратами, в частности к средствам аппаратурно безызбыточного контроля горизонтальной ориентации дистанционно пилотируемых летательных аппаратов, минимального веса, габаритов, энергопотребления, сложности и стоимости. Оно также может быть использовано для создания простых и высоконадежных средств контроля и резервных каналов пилотажно-навигационных систем современного самолета, защищенных от отказов и сбоев основной многократно резервированной сложной гироинерциальной системы управления.
Известен способ контроля горизонтальной ориентации аппарата, основанный на оценке поведения на нем маятниковой вертикали одномерного или двумерного вида [Тараторкин Б.С. Приборы для яхт и катеров. Справочник. Л.: Судостроение, 1984. с.156; Селезнев В.П. Навигационные устройства. М.: Машиностроение, 1974, с.152; Проспект фирмы Авиаприбор. Трехканальные кремниевые акселерометры АТ-1304, АТ-1305. МАКС-2001]. При этом измерение отклонений аппарата от горизонтальной плоскости ведется с помощью датчиков углов потенциометрического, индуктивного, оптического типа по осям подвеса маятника. Способ прост в реализации, но имеет сравнительно низкую точность. Это определяется влиянием ускорений движения аппарата на работу маятника, трением и погрешностями съема информации об углах тангажа и крена с его датчиков углов. Вес и габариты маятниковой вертикали создают дополнительные трудности при ее размещении на легком аппарате. Дистанционный контроль ориентации маятника на аппарате ухудшает условия работы оператора управления и сокращает объем передаваемой с аппарата полезной видеоинформации.
Известен способ контроля горизонтальной ориентации аппарата при помощи гироскопической вертикали с маятниковой коррекцией [Селезнев В.П. Навигационные устройства. М. Машиностроение, 1974, с.158; Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая реализация. М. Машиностроение, 1991. с.20-37], например, типа АГБ-3К, МГВ-1, МГВ-4. Гироскоп, управляемый маятником, благодаря своей устойчивости сглаживает динамические погрешности маятника. Съем контролируемой информации ведется с датчиков углов карданова подвеса гироскопа на аппарате. Способ широко применяется на современных летательных аппаратах. Он имеет необходимую точность измерения углов тангажа и крена, но его реализация на малогабаритных аппаратах создает значительные проблемы с питанием и энергопотреблением гироскопа, весом, габаритами и стоимостью аппаратуры.
Известен способ контроля горизонтальной ориентации аппарата с помощью инерциальных навигационных систем платформенного или бесплатформенного типа [Селезнев В.П. Навигационные устройства. М.: Машиностроение, 1974, с.366; Помыкаев И.И., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. М.: Машиностроение, 1983. с.226]. В платформенной системе контроль углового положения аппарата ведется по углам поворота карданового подвеса горизонтально ориентированной гироплатформы. В бесплатформенной системе тангаж и крен аппарата вычисляются на основе высокоточных измерений величин и направлений кажущихся ускорений и угловых скоростей аппарата в бортовом вычислителе по сложным алгоритмам. Стоимость, габариты и вес таких систем в большинстве случаев очень велики, энергопотребление значительно, а надежность оставляет желать лучшего. Для малогабаритных дистанционно пилотируемых аппаратов с ограниченным временем функционирования и дальностью полета их применение нецелесообразно.
Известен оптический способ контроля вертикали аппарата без маятников и гироскопов [Селезнев В.П. Навигационные устройства. М.: Машиностроение, 1974, с.198; Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974. с.108]. Он основан на оптическом контроле положения горизонта планеты относительно корпуса аппарата. Способ включает коническое сканирование горизонта оптическим датчиком. Ось конуса обзора в установившемся, сбалансированном по сигналам датчика, положении аппарата проходит через центр планеты, совпадая по направлению с вертикалью места. Углы тангажа и крена аппарата вызывают отклонение конуса обзора, что фиксируется с помощью датчика. Его выгодные сигналы пропорциональны контролируемым углам. Способ применим для контроля ориентации космических аппаратов и реализуется с помощью сложных и малонадежных инфракрасных датчиков. На малогабаритных и маловысотных дистанционно пилотируемых аппаратах его реализация невозможна из-за больших ошибок контроля. Помехозащищенность способа низкая.
Известен аналитический способ построения на борту космического аппарата вертикали, по которой можно контролировать его горизонтальную ориентацию [Селезнев В.П. Навигационные устройства. - М: Машиностроение, 1974, с.208]. В основу способа положено моделирование во времени изменения широты и вертикали места аппарата по уравнению Кеплера. При этом в качестве известных параметров здесь используются: углы начального экваториального положения аппарата, заданные параметры орбиты. Способ имеет ограничения по времени работы и низкую точность из-за заложенного в нем детерминизма маловозмущенного движения аппарата по орбите.
Известен аналитический способ построения на борту космического аппарата вертикали повышенной точности, использующий два следящих телескопа, визирующих светила [Бесекерский В.А, Иванов В.А., Самотокин Б.Б. Орбитальное гирокомпасирование. СПб.: Политехника, 1993. с.140]. Исходной информацией для вычислений в БЦВМ значений контролируемых углов тангажа и крена являются: координаты звезд, положение восходящего узла, наклонение орбиты, местоположение аппарата. На основании этих данных и сигналов синусно-косинусных трансформаторов кардановых подвесов следящих телескопов БЦВМ аналитически решает задачу определения текущей горизонтальной ориентации аппарата. Надежность способа ограничена процессами поиска, опознания и сопровождения, обеспечением углов обзора и видимости конкретных светил. Его реализация на легком аппарате, совершающем атмосферный полет, крайне затруднена и имеет большую стоимость и низкую надежность.
Известен радиолокационный способ контроля горизонтальной ориентации космического аппарата, основанный на измерениях дальностей до земной поверхности в четырех направлениях, составляющих постоянный угол с плоскостью, перпендикулярной к направлению приборной вертикали [Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974. с. 125-126]. По разности сигналов дальностей от центра масс аппарата до земной поверхности судят о малых углах тангажа и крена. Разновидность радиолокационного способа контроля горизонтальной ориентации подразумевает коническое сканирование радиолучом земной поверхности вокруг приборной вертикали аппарата. Отклонение аппарата по крену и тангажу приводит к колебательному характеру дальномерного сигнала на выходе приемника. Последующая его демодуляция позволяет выделить составляющие крена и тангажа контролируемой горизонтальной ориентации. Реализация радиолокационных способов связана с большими энергозатратами, весом и габаритами передатчика, приемника, антенно-фидерного тракта. Способы имеют низкую точность при маловысотном полете. Помехозащищенность приемопередающей радиолокационной системы и ее электромагнитная совместимость с основной электронной аппаратурой легкого дистанционно пилотируемого летательного аппарата крайне затруднена.
Известны также способы контроля горизонтальной ориентации только космических аппаратов, основанные на известных свойствах орбитального движения в околоземной среде. Они основаны на контроле плоскости орбиты и положения вектора скорости аппарата относительно ионосферы Земли [Селезнев В.П. Навигационные устройства. - М.: Машиностроение, 1974, с.210-220] гироорбитантом и ионным датчиком ориентации. Такой контроль ориентации на атмосферном аппарате невозможен.
Известен способ-прототип построения гравитационной вертикали, позволяющий контролировать горизонтальную ориентацию аппарата [Селезнев В.П. Навигационные устройства. М.: Машиностроение, 1974, с.205]. Способ заключается в одновременном измерении величин и направлений кажущихся линейных ускорений и угловой скорости аппарата, находящегося в центральном гравитационном поле. Величины и направления кажущихся линейных ускорений измеряются в двух фиксированных, равноудаленных от центра вращения аппарата точках. Вычисляется величина и направление составляющей кажущегося линейного ускорения, зависящей от угловой скорости вращения аппарата и удаления точки измерения кажущегося линейного ускорения от центра вращения. После чего определяются величина и направление разности измеренных кажущихся линейных ускорений без скомпенсированной величины и направления составляющей кажущегося линейного ускорения от угловой скорости вращения аппарата. Полученные при этом проекция разности скомпенсированного кажущегося линейного ускорения на продольную ось связанной системы координат пропорциональна оценке крена, а проекция разности - на поперечную ось связанной системы координат пропорциональна оценке тангажа контролируемой горизонтальной ориентации аппарата.
Применение в способе-прототипе только измерения кажущегося линейного ускорения и угловой скорости аппарата позволяет создать сравнительно простую, экономичную и надежную малогабаритную систему контроля ориентации аппарата на освоенных промышленностью микромеханических датчиках. Однако способ требует для своей реализации исключительно точных измерителей кажущегося линейного ускорения аппарата - акселерометров, их точного и стабильного симметрирования и расположения на аппарате. Его чувствительность зависит от величины взаимной удаленности акселерометров, что создает конструктивные проблемы для реализации, особенно на корпусе малогабаритного аппарата. Вибрации корпуса аппарата в двух удаленных точках измерения величин и направлений кажущегося линейного ускорения существенно влияют на установившиеся ошибки контроля горизонтальной ориентации аппарата.
Известно устройство для контроля горизонтальной ориентации аппарата - блок сравнения и предельного крена (БСПК) [Бондарчук И.Е., Харин В.И. Авиационное и радиоэлектронное оборудование самолета ЯК-40. М.: Транспорт. 1982. с.205; Перескоков А.Н. Приборное оборудование вертолетов МИ-8 (Т, МТ, МТВ, АМТ). СПб.: Академия ГА. 2003. с.19]. Устройство содержит две следящие системы с сельсинами - датчиками двух одинаковых авиагоризонтов (гировертикалей), релейные усилители, выполняющие функции компараторов, и ламельные схемы сигнализации предельных углов крена и тангажа аппарата. Авиагоризонты измеряют контролируемые углы тангажа и крена аппарата. Отказ одного из них создает рассогласование одноименных сигналов сельсинов и приводит к срабатыванию соответствующего компаратора, информирующего о неисправности прибора. Ламельные схемы сигнализации, связанные со следящими системами углов крена и тангажа, контролируют горизонтальную ориентацию аппарата при исправных авиагоризонтах. Габариты, вес, энергопотребление, стоимость такой системы не позволяют применить ее на летком аппарате. Применение авиаторизонтов, а тем более их резервирование для контроля горизонтальной ориентации, представляется излишним.
Известно устройство контроля горизонтальной ориентации аппарата для трех авиагоризонтов (гировертикалей), построенное по мажоритарному методу работы - блок контроля крена (БКК) [Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая реализация. М.: Машиностроение, 1991. с.38]. Помимо трех авиагоризонтов оно содержит три нелинейных элемента, образующих кворум-элемент, и компараторы. Последние проводят непрерывное сравнение выходных сигналов каждого из трех авиагоризонтов с их осредненным сигналом, полученным на выходе кворум-элемента. Осредненный сигнал, пропорциональный крену (тангажу), сравнивается также с допустимым значением крена (тангажа) горизонтальной ориентации аппарата. Устройство контролирует отказы авиагоризонтов и горизонтальную ориентацию аппарата с высокой точностью, надежностью и в широком диапазоне изменения крена и тангажа. Однако, как и для блока сравнения и предельного крена (БСПК), здесь необходимо избыточное число авиагоризонтов, размещение которых на малогабаритном дистанционно пилотируемом аппарате крайне затруднено, связано с ростом его стоимости, габаритов, энергопотребления.
Известно устройство контроля горизонтальной ориентации аппапарата - прототип, построенное по принципу гравитационной вертикали [Селезнев В.П. Навигационные устройства. М.: Машиностроение, 1974, с.205]. Оно содержит три пары акселерометров (два векторных акселерометра), установленных на штанге и помещенных в карданов подвес, блок вычитания выходных сигналов коллинеарных акселерометров, усилители, двигатели приводов карданова подвеса. Схема компенсации угловых ускорений штанги содержит также датчики угловых скоростей штанги. Выходы пар коллинеарных акселерометров, расположенных симметрично на концах штанги, соединены со входами блока вычитания. Эти входы соединены и с выходом схемы компенсации угловых ускорений штанги. Усилители и двигатели по осям карданова подвеса образуют приводы отработки углового положения штанги с акселерометрами. Входы усилителей этих приводов соединены с выходами блока вычитания так, что штанга с акселерометрами может поворачиваться в осях карданова подвеса до момента компенсации сигналов кажущихся ускорений, полученных с симметрично расположенных акселерометров. При этом продольная ось штанги устанавливается по направлению гравитационного поля Земли - гравитационной вертикали. Тогда контроль горизонтальной ориентации аппарата ведется по углам поворота карданова подвеса штанги. Устройство не содержит дорогих, энергоемких, тяжелых и габаритных гироскопов. Точность контроля угловой ориентации с применением существующих акселерометров инерциального типа может быть высокой, а их надежность много больше надежности авиагоризонтов (гировертикалей).
Недостатком известного устройства, выбранного за прототип, является реализация в нем механистического принципа контроля ориентации по углам поворота карданова подвеса. Требования, предъявляемые к точности, стабильности, технологии конструкции штанги для симметричных акселерометров, очень высокие. Размещение карданова подвеса и штанги с акселерометрами на малогабаритном аппарате практически затруднено.
Основной задачей, на решение которой направлены заявленный способ и устройство, является контроль горизонтальной ориентации малогабаритного летательного аппарата, повышение его точности и надежности с аппаратурно безызбыточными средствами минимального веса, габаритов, энергопотребления, сложности и стоимости. Реализация контроля предусматривает выполнение простейших, безынерционных, надежных элементарных вычислений. В совокупности с известными микромеханическими средствами измерениями параметров движения это позволит создать малогабаритные дистанционно пилотируемые аппараты, расширит функциональные возможности современных спутниковых навигационных систем в плане определения параметров горизонтальной ориентации аппарата.
Техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является создание аппаратурно безызбыточных комплексных систем автоматического управления и контроля повышенной точности, надежности, достоверности контроля с высокими технико-экономическими показателями по габаритам, весу, энергопотреблению, стоимости, удобству их эксплуатации на легком летательном аппарате.
Технический результат достигается тем, что в способе контроля горизонтальной ориентации аппарата, основанном на измерении величины и направления кажущегося линейного ускорения, согласно изобретению одновременно измеряют текущие величину и направление абсолютного и кажущегося линейного ускорения аппарата, определяют величину и направление разности кажущегося и абсолютного линейного ускорения аппарата, а затем - отношение проекции разности кажущегося и абсолютного линейного ускорения аппарата на продольную ось связанной системы координат к величине ускорения силы тяжести и отношение проекции разности кажущегося и абсолютного линейного ускорения на поперечную ось связанной системы координат к проекции разности кажущегося и абсолютного линейного ускорения на нормальную ось связанной системы координат, после чего определяют контролируемую горизонтальную ориентацию аппарата согласно соотношениям:

где  ,
,  - оценки тангажа, крена контролируемой горизонтальной ориентации аппарата, угл. град;
- оценки тангажа, крена контролируемой горизонтальной ориентации аппарата, угл. град;
ΔX, ΔY, ΔZ - проекции величины и направления разности кажущегося и абсолютного линейного ускорения аппарата на продольную, нормальную и поперечную оси связанной системы координат, м/с2;
g - величина ускорения силы тяжести в точке местоположения аппарата, м/с2,
и сравнивают ее с заданными значениями.
Указанный технический результат достигается тем, что в устройство для контроля горизонтальной ориентации аппарата, содержащее последовательно соединенные акселерометр и блок вычитания, дополнительно введены датчик абсолютного линейного ускорения аппарата, выход которого соединен со вторым вычитающим входом блока вычитания, а также последовательно соединенные задатчик величины ускорения силы тяжести, блок определения составляющих ориентации, второй вход которого соединен с выходом блока вычитания, и блок компараторов, вторым входом соединенный с задатчиком горизонтальной ориентации аппарата.
Указанный технический результат достигается также тем, что в устройстве для контроля горизонтальной ориентации аппарата датчик абсолютного линейного ускорения аппарата содержит датчики продольной, нормальной и поперечной линейной скорости аппарата, датчики угловой скорости тангажа, крена, рыскания аппарата, три дифференциатора, три сумматора, шесть умножителей так, что первые входы первого дифференциатора, первого и второго умножителей соединены с датчиком продольной линейной скорости аппарата, первые входы второго дифференциатора, третьего и четвертого умножителей соединены с датчиком нормальной линейной скорости аппарата, первые входы третьего дифференциатора, пятого и шестого умножителей соединены с датчиком поперечной линейной скорости аппарата, вторые входы первого и третьего умножителей соединены с выходом датчика угловой скорости тангажа, вторые входы второго и шестого умножителей соединены с выходом датчика угловой скорости рыскания, вторые входы четвертого и пятого умножителей соединены с выходом датчика угловой скорости крена, первый суммирующий вход первого сумматора соединен с выходом первого дифференциатора, второй вычитающий вход - с выходом третьего умножителя, третий суммирующий вход - с выходом шестого умножителя, а выход - с выходом продольной составляющей абсолютного линейного ускорения аппарата, первый суммирующий вход второго сумматора соединен с выходом второго дифференциатора, второй вычитающий вход - с выходом пятого умножителя, третий суммирующий вход - с выходом первого умножителя, а выход - с выходом нормальной составляющей абсолютного линейного ускорения аппарата, первый суммирующий вход третьего сумматора соединен с выходом третьего дифференциатора, второй вычитающий вход - с выходом второго умножителя, третий суммирующий вход - с выходом четвертого умножителя, а выход - с выходом поперечной составляющей абсолютного линейного ускорения аппарата.
Указанный технический результат достигается также тем, что в устройстве для контроля горизонтальной ориентации аппарата, содержащем датчик продольной линейной скорости аппарата, он выполнен в виде датчика воздушной скорости по продольной оси связанной системы координат, а устройство дополнительно содержит последовательно соединенные датчик угла атаки, первый функциональный преобразователь, седьмой умножитель, второй вход которого через второй функциональный преобразователь соединен с выходом датчика угла скольжения, восьмой умножитель, второй вход которого соединен с выходом датчика воздушной скорости по продольной оси связанной системы координат, а выход - образует поперечную линейную скорость аппарата, последовательно соединенные датчик угла атаки, третий функциональный преобразователь инвертор, девятый умножитель, второй вход которого соединен с выходом датчика воздушной скорости по продольной оси связанной системы координат, а выход - образует нормальную линейную скорость аппарата.
Указанный технический результат достигается также тем, что в устройстве для контроля горизонтальной ориентации аппарата блок определения составляющих ориентации содержит первую, вторую схемы деления, четвертый, пятый функциональный преобразователи так, что первый вход блока определения составляющих ориентации соединен с первым входом делителя первой схемы деления, второй вход делимого которой соединен с входом разности продольных кажущегося и абсолютного линейных ускорений на втором входе блока определения составляющих ориентации, выход первой схемы деления через четвертый функциональный преобразователь соединен с выходом оценки тангажа контролируемой горизонтальной ориентации аппарата, первый вход делителя второй схемы деления соединен с входом разности нормальных кажущегося и абсолютного линейных ускорений, второй вход делимого - с входом разности поперечных кажущегося и абсолютного линейных ускорений на втором входе блока определения составляющих ориентации, выход второй схемы деления через пятый функциональный преобразователь соединен с выходом оценки крена контролируемой горизонтальной ориентации аппарата.
Указанный технический результат достигается также тем, что в устройстве для контроля горизонтальной ориентации аппарата блок компараторов содержит первый, второй компараторы и схему ИЛИ, первый вход которой соединен с выходом первого компаратора, один вход которого соединен с первым входом блока компараторов оценки тангажа, а другой вход - со вторым входом блока компараторов заданной горизонтальной ориентации по тангажу, второй вход схемы ИЛИ соединен с выходом второго компаратора, один вход которого соединен с первым входом блока компараторов оценки крена, другой вход - со вторым входом блока компараторов заданной горизонтальной ориентации по крену, выход схемы ИЛИ является выходом устройства контроля горизонтальной ориентации.
Совокупность существенных признаков изобретения обеспечивает достижение технического результата, достигаемого при осуществлении изобретения - способа и устройства контроля горизонтальной ориентации аппарата. Технический результат достигается за счет определения на борту аппарата проекций вектора ускорения силы тяжести на оси связанной системы координат и решения соответствующих уравнений относительно тригонометрических функций углов тангажа и крена контролируемой горизонтальной ориентации аппарата. При появлении существенных отличий этих углов ориентации от заданных значений фиксируется отказ системы управления аппаратом.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного способа и устройства контроля горизонтальной ориентации аппарата, отсутствуют, следовательно, заявленное изобретение соответствует условию ″новизна″.
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства-аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства-аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства-аналога с одновременным исключением обусловленной ее наличием функции и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создании устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставленнии таких признаков во взаимосвязи либо изменении вида взаимосвязи, если известен факт влияния каждого из них на технический результат, и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует ″изобретательскому уровню″.
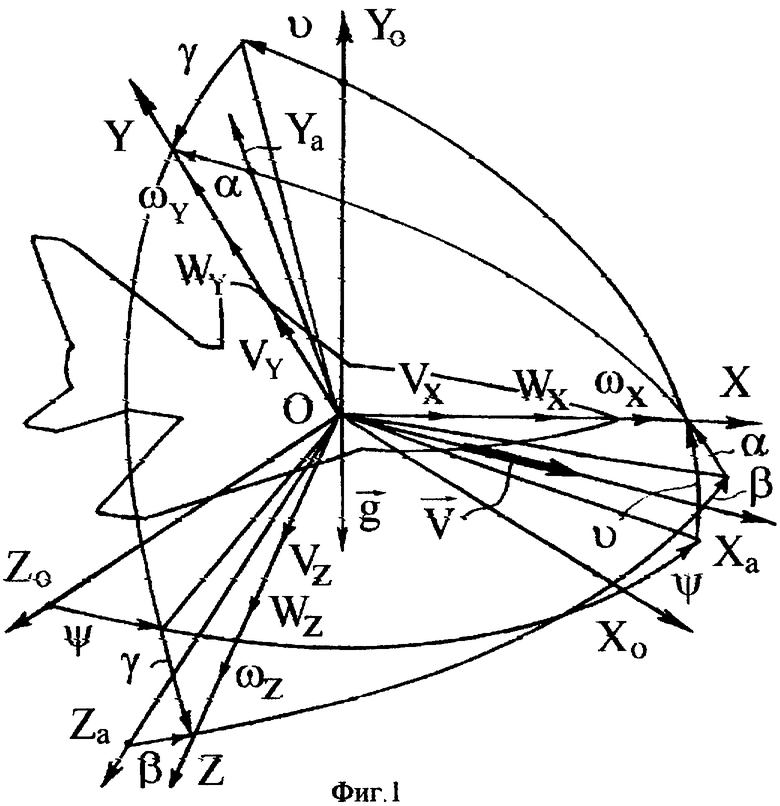
На фиг.1 изображено положение систем координат, скоростей, ускорений, углов контролируемой горизонтальной ориентации и приняты следующие обозначения:
О XO YO ZO - земная горизонтальная система координат, центр которой - точка О, расположен в центре масс аппарата, ось О XO - горизонтальная ось направления движения, ось OYO - местная вертикаль, а ось OZO - горизонтальная ось перпендикулярна направлению движения;
О X Y Z - связанная система координат аппарата, центр которой также расположен в центре масс, ось OX - продольная ось связанной системы координат; ось OY - нормальная ось связанной системы координат; ось OZ - поперечная ось связанной системы координат;
О Xa Ya Za - скоростная система координат, центр которой в центре масс, ось О Xa - скоростная ось совпадает по направлению с вектором  скорости аппарата; ось OYa - ось подъемной силы, лежит в плоскости симметрии, перпедикулярна OXa; ось OZa - боковая ось, направлена в сторону правого крыла и перпендикулярна плоскости
скорости аппарата; ось OYa - ось подъемной силы, лежит в плоскости симметрии, перпедикулярна OXa; ось OZa - боковая ось, направлена в сторону правого крыла и перпендикулярна плоскости
O Xa Ya,
ψ, ϑ, γ - углы курса, тангажа и крена определяют взаимное угловое положение систем координат О XO YO ZO и O X Y Z;
α, β - углы атаки и скольжения определяют взаимное угловое положение систем координат О Х Y Z и О Xa Ya Za;
 - вектор ускорения силы тяжести;
- вектор ускорения силы тяжести;
 - вектор скорости аппарата;
- вектор скорости аппарата;
VX, VY, VZ - проекции вектора скорости на оси связанной системы координат;
WX, WY, WZ - проекции вектора абсолютного линейного ускорения на оси связанной системы координат;
ωX, ωY, ωZ - проекции вектора угловой скорости крена, рыскания, тангажа на оси связанной системы координат.
На фиг.2 приведена структурная схема устройства контроля горизонтальной ориентации аппарата по п.2 формулы, где приняты следующие обозначения:
1 - акселерометр;
2 - блок вычитания;
3 - датчик абсолютного линейного ускорения аппарата;
4 - блок определения составляющих ориентации;
5 - задатчик величины ускорения силы тяжести;
6 - блок компараторов;
7 - задатчик горизонтальной ориентации.
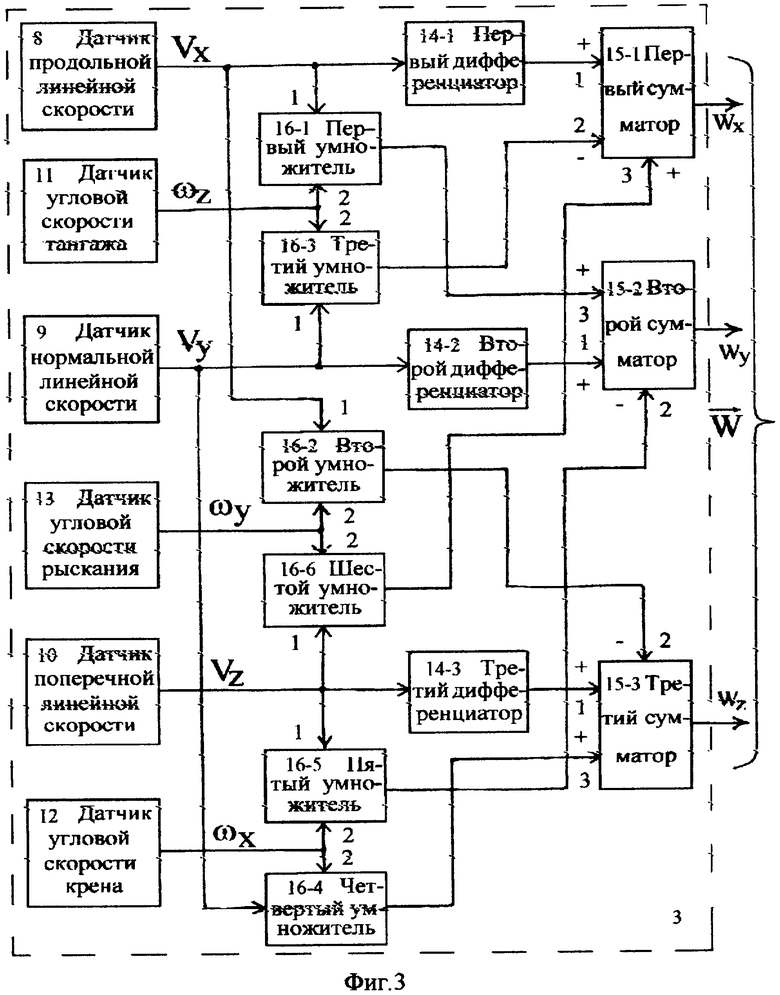
На фиг.3 приведена структурная схема датчика 3 абсолютного линейного ускорения аппарата по п.2 формулы, где приняты следующие обозначения:
8 - датчик продольной линейной скорости;
9 - датчик нормальной линейной скорости;
10 - датчик поперечной линейной скорости;
11 - датчик угловой скорости тангажа;
12 - датчик угловой скорости крена;
13 - датчик угловой скорости рыскания;
14-1, 14-2, 14-3 - первый, второй, третий дифференциаторы;
15-1, 15-2, 15-3 - первый, второй, третий сумматоры;
16-1, 16-2, 16-3, 16-4, 16-5, 16-6 - первый, второй, третий, четвертый, пятый, шестой умножители.
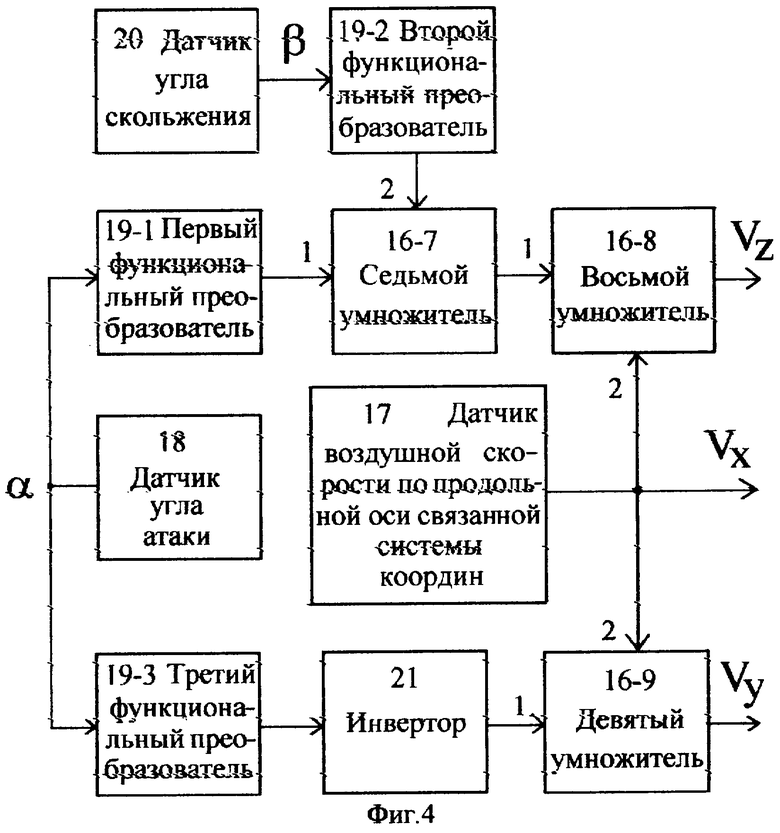
На фиг.4 приведена структурная схема варианта реализации датчика 8 продольной линейной скорости, датчика 9 нормальной линейной скорости, датчика 10 поперечной линейной скорости по п.4 формулы, где приняты следующие обозначения:
16-7, 16-8, 16-9 - седьмой, восьмой, девятый умножители;
17 - датчик воздушной скорости по продольной оси связанной системы координат;
18 - датчик угла атаки;
19-1, 19-2, 19-3 - первый, второй, третий функциональные преобразователи;
20 - датчик угла скольжения;
21 - инвертор.
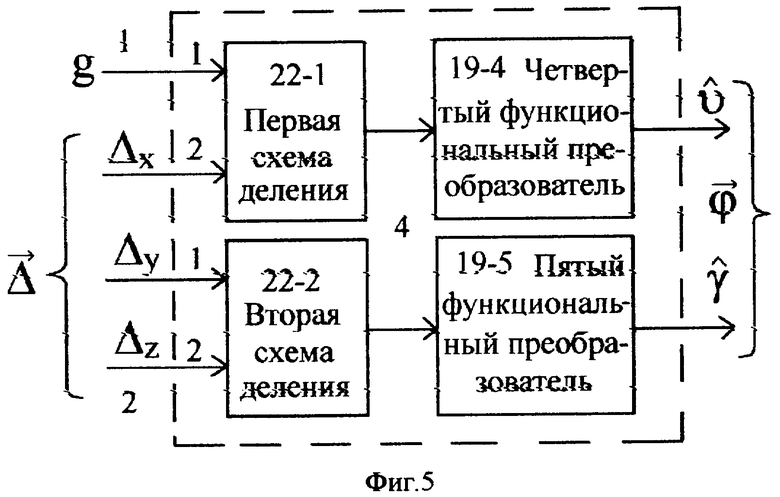
На фиг.5 приведена структурная схема блока 4 определения составляющих ориентации по п.5 формулы, где приняты следующие обозначения:
22-1, 22-2 - первая, вторая схемы деления;
19-4, 19-5 - четвертый, пятый функциональные преобразователи.
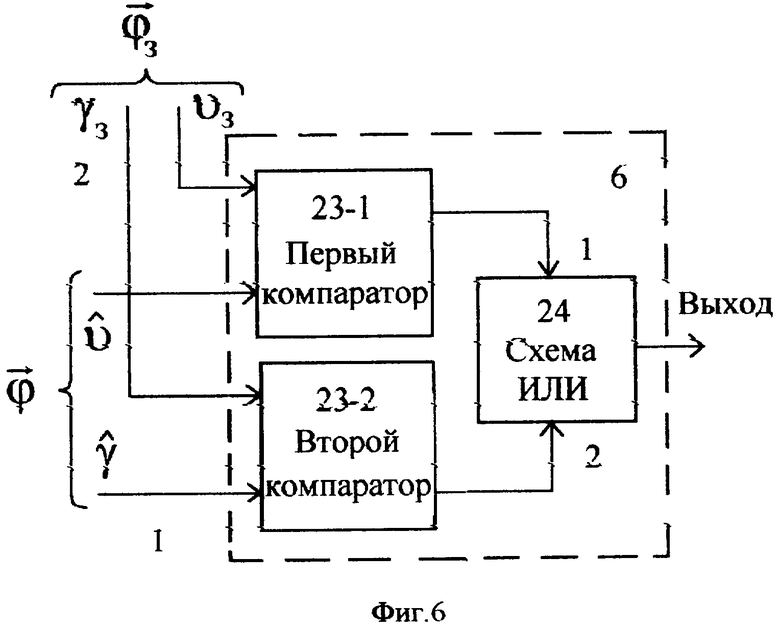
На фиг.6 приведена структурная схема блока 6 компараторов по п.6 формулы, где приняты следующие обозначения:
23-1, 23-2 - первый, второй компаратор;
24 - схема ИЛИ.
Сущность способа контроля горизонтальной ориентации аппарата поясняется чертежом (фиг.1) и состоит в определении положения его приборной вертикали через текущие вычисления проекций вектора  ускорения силы тяжести, кажущегося
ускорения силы тяжести, кажущегося  и абсолютного
и абсолютного  линейных ускорений на оси связанной системы координат OXYZ. В предложенном способе вычисляются разности измеренного кажущегося
линейных ускорений на оси связанной системы координат OXYZ. В предложенном способе вычисляются разности измеренного кажущегося  и вычисленного абсолютного
и вычисленного абсолютного  линейных ускорений в точке местоположения измерителя на аппарате. При этом величина и направление кажущегося линейного ускорения аппарата, определяемого измерителем - акселерометром, имеет следующее выражение [1, с.79];
линейных ускорений в точке местоположения измерителя на аппарате. При этом величина и направление кажущегося линейного ускорения аппарата, определяемого измерителем - акселерометром, имеет следующее выражение [1, с.79];

где а - величина вектора кажущегося линейного ускорения, м/с2;
W - величина вектора абсолютного линейного ускорения, м/с2;
g - величина вектора ускорения силы тяжести {2, с.791], м/с2.
Измерение кажущегося  линейного ускорения возможно либо одним трехмерным векторным акселерометром [1, с.79], либо тремя одномерными взаимно ортогональными акселерометрами, оси чувствительности которых направлены по осям связанной системы координат O X Y Z.
линейного ускорения возможно либо одним трехмерным векторным акселерометром [1, с.79], либо тремя одномерными взаимно ортогональными акселерометрами, оси чувствительности которых направлены по осям связанной системы координат O X Y Z.
Величина и направление вычисленного абсолютного линейного ускорения  определяется дифференцированием измеренных проекций абсолютной скорости аппарата на его связанные оси либо от доплеровского измерителя скорости и угла сноса (ДИСС), либо от спутниковой навигационной системы (СНС) [3, с.118], либо вычисляется по выражению [4, с.340]:
определяется дифференцированием измеренных проекций абсолютной скорости аппарата на его связанные оси либо от доплеровского измерителя скорости и угла сноса (ДИСС), либо от спутниковой навигационной системы (СНС) [3, с.118], либо вычисляется по выражению [4, с.340]:

где  - проекции вектора абсолютного линейного ускорения;
- проекции вектора абсолютного линейного ускорения;
 - проекции вектора абсолютной линейной скорости;
- проекции вектора абсолютной линейной скорости;
 - проекции вектора
- проекции вектора  абсолютной угловой скорости аппарата.
абсолютной угловой скорости аппарата.
Величина и направление искомой разности кажущегося и абсолютного линейных ускорений будет:

В скалярной форме векторное соотношение (4) в проекциях на оси связанной системы координат O X Y Z можно записать в виде:

где  - проекции вектора кажущегося линейного ускорения;
- проекции вектора кажущегося линейного ускорения;
 - проекции вектора ускорения силы тяжести.
- проекции вектора ускорения силы тяжести.
В соответствии с фиг.1 взаимосвязь горизонтальной земной системы координат
О Xо Yо Zо, где известна величина и направление вектора ускорения силы тяжести, и связанной системы координат О Х Y Z аппарата определяется соотношением: 
где  ;
;  ;
; 
- матрицы поворотов аппарата на углы крена γ, тангажа ϑ, рыскания ψ.
Аналогично в соответствии с фиг.1 взаимосвязь скоростной системы координат
О Xa Ya Za, где определяется величина и направление вектора абсолютной линейной скорости, и связанной системы координат О X Y Z определяется соотношением: 
где 
- матрицы элементарных поворотов аппарата на углы скольжения β и атаки α. По (6) проекции вектора ускорения силы тяжести будут определяться соотношением вида:
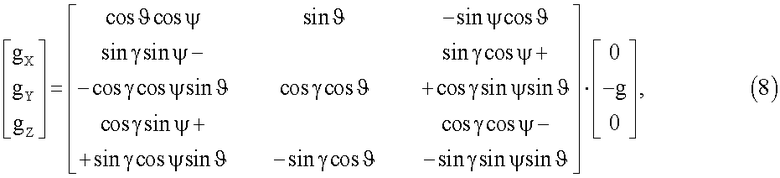
где  - проекции вектора ускорения силы тяжести на оси земной горизонтальной системы координат OXOYOZO.
- проекции вектора ускорения силы тяжести на оси земной горизонтальной системы координат OXOYOZO.
По (7) проекции вектора абсолютной линейной скорости могут определяться преобразованием вида:

где  - проекции вектора абсолютной скорости на оси скоростной системы координат О Xa Ya Za.
- проекции вектора абсолютной скорости на оси скоростной системы координат О Xa Ya Za.
По соотношению (8) проекции вектора ускорения силы тяжести:

Проекции вектора абсолютного линейного ускорения (3) имеют вид 
где проекции вектора абсолютной линейной скорости могут определяться по выражению (9) через аэрометрические полетные параметры скорости V, углов атаки α и скольжения β в виде:

В том случае, когда в качестве измерителя проекции VX применяется датчик воздушной скорости по продольной оси связанной системы координат, то по формулам (12) можно вычислить и проекции:

По выражениям (5) и (10) можно записать:

где  - проекции разности кажущегося и абсолютного линейного ускорения на продольную, нормальную и поперечную оси связанной системы координат аппарата:
- проекции разности кажущегося и абсолютного линейного ускорения на продольную, нормальную и поперечную оси связанной системы координат аппарата:

Преобразовав первое равенство и отношение третьего равенства ко второму равенству в выражении (14), получаем соотношения для контроля горизонтальной ориентации вида:

Определяемые по (16) оценки тангажа и крена  сравниваются с заданными значениями
сравниваются с заданными значениями  . В том случае, если разности
. В том случае, если разности  и/или
и/или  выходят за поле допуска, то фиксируется отклонение аппарата от заданной горизонтальной ориентации.
выходят за поле допуска, то фиксируется отклонение аппарата от заданной горизонтальной ориентации.
Способ осуществляется следующим образом. Посредством трехмерного векторного измерителя, установленного на корпусе аппарата, определяется величина и направление кажущегося линейного ускорения 
Тем самым измеряются проекции: aX, aY, aZ вектора на оси связанной системы координат О X Y Z (фиг.1). Они могут быть измерены и с помощью трех одномерных взаимно ортогональных акселерометров, оси чувствительности которых также ориентированы по осям связанной системы координат. Одновременно определяется величина и направление абсолютного линейного ускорения аппарата. Учитывая предпочтительность процесса измерения параметров движения аппарата бортовыми измерителями также в связанной системы координат О X Y Z, вычисление величины и направления абсолютного линейного ускорения аппарата следует вести по выражениям:
куда входят параметры линейного VX, VY, VZ и углового ωX, ωY, ωZ движения аппарата. Измерение абсолютных линейных скоростей аппарата ведется датчиком продольной VX линейной скорости, датчиком номальной VY линейной скорости, датчиком поперечной VZ линейной скорости радиотехнического или аэрометрического типа. В частности, для легкого дистанционно пилотируемого аппарата предпочтительно аэрометрическое определение VX, VY, VZ. Для этого измеряются: воздушная скорость по продольной оси связанной системы координат, углы атаки и скольжения аппарата и вычисляются значения: 
Одновременно измеряются проекции ωX, ωY, ωZ угловой скорости аппарата по осям связанной системы координат и вычисляются по (18) проекции абсолютного линейного ускорения. В доплеровском измерителе скорости и угла сноса (ДИСС) или спутниковой навигационной системе (СНС) параметры VX, VY, VZ измеряются радиотехнически, а значит определение величины и направления абсолютной линейной скорости (или ускорения) аппарата может быть реализовано в одном измерителе - ДИСС или СНС. Параметры углового движения ωX, ωY, ωZ в (18) получаются с микромеханических гироскопических датчиков угловой скорости крена, рыскания, тангажа, оси чувствительности которых также ориентированы по осям связанной системы координат O X Y Z аппарата. Для маломаневренного аппарата, когда угловые скорости ωX, ωY, ωZ очень малы, вычисления по (18) можно значительно упростить, ограничиваясь измерением абсолютного линейной скорости аппарата и ее дифференцированием: 
без вычислений с параметрами угловой скорости. Современные системы позволяют использовать в качестве измерителя величины и направления абсолютного линейного ускорения аппарата, например, только СНС [3, с.118; 6, c.111] или ДИСС [7, с.38; 8, с.244]. Причем известное комплексирование аэрометрического и радиотехнического измерения величины и направления абсолютного линейного ускорения аппарата наиболее перспективно для повышения точности и надежности работы предлагаемой системы контроля горизонтальной ориентации. Далее по измеренным кажущемуся и абсолютному линейным ускорениям определяется разность  .
.
Для этого вычисляются разности проекций:

Зная величину ускорения g силы тяжести в точке местоположения аппарата [2, с.791], вычисляем отношения: ΔX/g и -ΔZ/ΔY, характеризующие горизонтальную ориентацию аппарата, и обратные тригонометрические функции этих отношений

которые дают значения угловой меры контролируемых оценок горизонтальной ориентации аппарата . При этом отклонение аппарата от заданной горизонтальной ориентации определяется сравнением полученных значений с учетом полей допусков нормального функционирования системы.
Способ контроля горизонтальной ориентации аппарата по п.1 формулы осуществляют следующим образом. Измеряют величину и направление кажущегося и абсолютного линейного ускорения аппарата. Определяют величину и направление разности  кажущегося и абсолютного линейных ускорений. Затем, зная величину ускорения g силы тяжести в точке местоположения аппарата, вычисляют отношение проекции ΔX разности кажущегося aX и абсолютного WX линейного ускорения аппарата на продольную ось связанной системы координат к величине ускорения g силы тяжести. Обратная тригонометрическая функция arc sin этого отношения позволяет определить оценку контролируемого угла тангажа аппарата. Аналогично и одновременно вычисляют отношение проекции - ΔZ разности кажущегося aZ и абсолютного WZ линейного ускорения аппарата на поперечную ось связанной системы координат к проекции ΔY разности кажущегося aY и абсолютного WY линейного ускорения аппарата на нормальную ось связанной системы координат. Обратная тригонометрическая функция arc tg этого отношения позволяет определить оценку контролируемого угла крена аппарата. Для контроля горизонтальной ориентации аппарата и ее соответствия заданным значениям тангажа ϑЗ и крена γЗ производится сравнение с текущими оценками и .
кажущегося и абсолютного линейных ускорений. Затем, зная величину ускорения g силы тяжести в точке местоположения аппарата, вычисляют отношение проекции ΔX разности кажущегося aX и абсолютного WX линейного ускорения аппарата на продольную ось связанной системы координат к величине ускорения g силы тяжести. Обратная тригонометрическая функция arc sin этого отношения позволяет определить оценку контролируемого угла тангажа аппарата. Аналогично и одновременно вычисляют отношение проекции - ΔZ разности кажущегося aZ и абсолютного WZ линейного ускорения аппарата на поперечную ось связанной системы координат к проекции ΔY разности кажущегося aY и абсолютного WY линейного ускорения аппарата на нормальную ось связанной системы координат. Обратная тригонометрическая функция arc tg этого отношения позволяет определить оценку контролируемого угла крена аппарата. Для контроля горизонтальной ориентации аппарата и ее соответствия заданным значениям тангажа ϑЗ и крена γЗ производится сравнение с текущими оценками и .
Смысл изобретения состоит в определении горизонтальной ориентации аппарата по разности проекций на связанные оси его кажущегося и абсолютного ускорений. Эта разность зависит от известной величины ускорения силы тяжести и ориентации аппарата относительно вертикали места. Она формируется в блоке вычитания, на входы которого поступают сигналы акселерометра и датчика абсолютного линейного ускорения аппарата. При этом величина и направление кажущегося ускорения измеряются либо одним трехмерным акселерометром, либо тремя взаимо ортогональными одномерными акселерометрами [4, с.335]. Величина и направление абсолютного ускорения вычисляется либо дифференцированием сигналов доплеровских каналов измерения скорости, например, спутниковой навигационной системы [3, с.118], либо вычисляется по сигналам датчиков скорости аппарата, углов атаки и скольжения, его угловых скоростей. В каждом из перечисленных вариантов датчика абсолютного линейного ускорения содержится измеритель линейных скоростей аппарата по осям связанной системы координат аэрометрического или радиотехнического типа. Зная взаимосвязь разностей кажущегося и абсолютного ускорений с проекциями ускорения силы тяжести, получаются отношения проекций разностей кажущегося и абсолютного ускорений и обратные тригонометрические функции углов тангажа, крена в блоке определения составляющих ориентации. При этом с задатчика величины ускорения силы тяжести в этот блок поступает сигнал, пропорциональный величине ускорения силы тяжести в точке местоположения аппарата относительно Земли [2, с.791]. В блоке компараторов фиксируется отклонение аппарата от заданной горизонтальной ориентации, установленной задатчиком горизонтальной ориентации.
При этом определение продольной, нормальной и поперечной линейной скорости аппарата по осям связанной системы координат производится по сигналам доплеровских каналов, например, спутниковой навигационной системы. Датчик абсолютного линейного ускорения аппарата реализует выражение (3), которое в скалярной форме имеет вид:
Для маломаневренного аппарата, когда ωX, ωY, ωZ малы, имеем:

На основе фиг.1 несложно установить, что проекции вектора скорости  аппарата на оси связанной системы координат имеют вид:
аппарата на оси связанной системы координат имеют вид: 
где α, β - углы атаки и скольжения аппарата. Тогда можно определить величину V вектора скорости, а затем и искомые проекции VY, VZ, применяемые в (18), (19) для реализации датчика абсолютного линейного ускорения аппарата. Если датчик продольной линейной скорости VX аппарата выполнен, например в виде датчика воздушной скорости по продольной оси связанной системы координат, тогда 
Первый, второй и третий функциональные преобразователи формируют тригонометрические функции secα, tgβ и tgα, используемые в формуле (26). Проекции
VX, VY, VZ вектора скорости могут быть получены и на выходе доплеровского измерителя скорости и угла сноса аппарата.
При этом в блоке определения составляющих ориентации вычисляются оценки (16) тангажа и крена аппарата. В первой схеме деления определяется отношение разности проекций ΔX кажущегося и абсолютного линейных ускорений на продольную ось связанной системы координат к величине ускорения g силы тяжести, пропорциональное sin ϑ. Во второй схеме деления определяется отношение разности проекций - ΔZ кажущегося и абсолютного линейных ускорений на поперечную ось к разности проекций ΔY кажущегося и абсолютного линейных ускорений на нормальную ось связанной системы координат, пропорциональное tgγ. Тогда на выходе четвертого функционального преобразователя, реализующего обратную тригонометрическую функцию arc sin, получается оценка тангажа , а на выходе пятого функционального преобразователя, реализующего обратную тригонометрическую функцию arc tg, - оценка крена аппарата. В том случае, когда заявленное устройство контролирует ориентацию маломаневренного аппарата с ограниченными полетными отклонениями от плоскости горизонта (|ϑ|, |γ|≤14÷17 угл. град), то четвертый и пятый функциональные преобразователи могут быть заменены простейшими масштабирующими усилителями с коэффициентами передачи 57,3. Полученные оценки горизонтальной ориентации , будут иметь размерность угл. град.
Определяемые в блоке определения составляющих ориентации оценки тангажа, крена ,
здесь сравниваются с заданными значениями тангенса ϑЗ и крена γЗ. В том случае, если разности  и/или
и/или  выходят за поле допуска, то фиксируется отклонение аппарата от заданной горизонтальной ориентации.
выходят за поле допуска, то фиксируется отклонение аппарата от заданной горизонтальной ориентации.
Устройство для контроля горизонтальной ориентации аппарата (фиг.2) содержит последовательно соединенные акселерометр 1 и блок 2 вычитания, второй вычитающий вход которого соединен с выходом датчика 3 абсолютного линейного ускорения аппарата. Блок 4 определения составляющих ориентации своим первым входом соединен с выходом задатчика 5 величины ускорения силы тяжести, вторым входом - с выходом блока 2 вычитания, а выходом - с первым входом блока 6 компараторов, второй вход которого соединен с выходом задатчика 7 горизонтальной ориентации, а выход - является выходом устройства.
Датчик 3 абсолютного линейного ускорения аппарата (фиг.3) содержит датчик 8 продольной линейной скорости, датчик 9 нормальной линейной скорости, датчик 10 поперечной линейной скорости, датчик 11 угловой скорости тангажа, датчик 12 угловой скорости крена, датчик 13 угловой скорости рыскания, дифференциаторы 14-1, 14-2, 14-3, сумматоры 15-1, 15-2, 15-3, умножители 16-1, 16-2, 16-3, 16-4, 16-5, 16-6 так, что первые входы дифференциатора 14-1, умножителей 16-1, 16-2 соединены с выходом датчика 8 продольной линейной скорости, первые входы дифференциатора 14-2, умножителей 16-3, 16-4 соединены с выходом датчика 9 нормальной линейной скорости, первые входы дифференциатора 14-3, умножителей 16-5, 16-6 соединены с выходом датчика 10 поперечной линейной скорости. Вторые входы умножителей 16-1, 16-3 соединены с выходом датчика 11 угловой скорости тангажа, вторые входы умножителей 16-2, 16-6 соединены с выходом датчика 13 угловой скорости рыскания, вторые входы умножителей 16-4, 16-5 соединены с выходом датчика 12 угловой скорости крена. Первый суммирующий вход сумматора 15-1 соединен с выходом дифференциатора 14-1, второй вычитающий вход - с выходом умножителя 16-3, третий суммирующий вход - с выходом умножителя 16-6, а выход - с выходом продольной составляющей абсолютного линейного ускорения аппарата. Первый суммирующий вход сумматора 15-2 соединен с выходом дифференциатора 14-2, второй вычитающий вход - с выходом умножителя 16-5, третий суммирующий вход - с выходом умножителя 16-1, а выход - с выходом нормальной составляющей абсолютного линейного ускорения аппарата. Первый суммирующий вход сумматора 15-3 соединен с выходом дифференциатора 14-3, второй вычитающий вход - с выходом умножителя 16-2, третий суммирующий вход - с выходом умножителя 16-4, а выход - с выходом поперечной составляющей абсолютного линейного ускорения аппарата.
Датчик 8 продольной линейной скорости (фиг.4) аппарата выполнен в виде датчика 17 воздушной скорости по продольной оси связанной системы координат, а устройство дополнительно содержит последовательно соединенные датчик 18 угла атаки, функциональный преобразователь 19-1, умножитель 16-7, второй вход которого через функциональный преобразователь 19-2 соединен с выходом датчика 20 угла скольжения, умножитель 16-8, второй вход которого соединен с выходом датчика 17 воздушной скорости по продольной оси связанной системы координат, а выход образует поперечную линейную скорость аппарата, последовательно соединенные датчик 18 угла атаки, функциональный преобразователь 19-3, инвертор 21, умножитель 16-9, второй вход которого соединен с выходом датчика 17 воздушной скорости по продольной оси связанной системы координат, а выход образует нормальную линейную скорость аппарата.
Блок 4 определения составляющих ориентации (фиг.5) содержит схемы 22-1, 22-2 деления, функциональные преобразователи 19-4, 19-5 так, что первый вход блока 4 определения составляющих ориентации соединен с первым входом делителя схемы 22-1 деления, второй вход делимого которой соединен с входом разности продольных кажущегося и абсолютного линейных ускорений на втором входе блока 4 определения составляющих ориентации. Выход схемы 22-1 деления через функциональный преобразователь 19-4 соединен с выходом оценки тангажа контролируемой горизонтальной ориентации аппарата. Первый вход делителя схемы 22-2 деления соединен с входом разности нормальных кажущегося и абсолютного линейных ускорений на втором входе блока 4 определения составляющих ориентации, второй вход делимого - с входом разности поперечного кажущегося и абсолютного линейных ускорений на втором входе блока 4 определения составляющих ориентации. Выход схемы 22-2 деления через функциональный преобразователь 19-5 соединен с выходом оценки крена контролируемой горизонтальной ориентации аппарата.
Блок 6 компараторов содержит компараторы 23-1, 23-2 и схему 24 ИЛИ так, что ее первый вход соединен с выходом компаратора 23-1, один вход которого соединен с первым входом блока 6 компараторов оценки тангажа, а другой вход - со вторым входом блока 6 компараторов заданной горизонтальной ориентации по тангажу. Второй вход схемы 24 ИЛИ соединен с выходом компаратора 23-2, один вход которого соединен с первым входом блока 6 компараторов оценки крена, другой вход - со вторым входом блока 6 компараторов заданной горизонтальной ориентации по крену. Выход схемы 24 ИЛИ является выходом устройства контроля горизонтальной ориентации.
Устройство для контроля горизонтальной ориентации аппарата по п.2 формулы (фиг.2) работает следующим образом. Сигнал, пропорциональный величине и направлению кажущегося линейного ускорения аппарата, с акселерометра 1 поступает на первый суммирующий вход блока 2 вычитания, на второй вычитающий вход которого поступает сигнал, пропорциональный величине и направлению абсолютного линейного ускорения аппарата. Этот сигнал получается на выходе датчика 3 абсолютного линейного ускорения аппарата, выполненного с применением аэрометрических и/или радиотехнических измерителей. Выходной сигнал блока 2 вычитания, пропорциональный разности кажущегося и абсолютного линейного ускорения, поступает на второй вход блока 4 определения составляющих ориентации, на первый вход которого с задатчика 5 величины ускорения силы тяжести одновременно поступает сигнал, пропорциональный величине ускорения g силы тяжести в точке местоположения аппарата. В блоке 4 определения составляющих ориентации получается сигнал  , пропорциональный составляющим горизонтальной ориентации аппарата по тангажу и крену . Поступая на первый вход блока 6 компараторов, он сравнивается с сигналом
, пропорциональный составляющим горизонтальной ориентации аппарата по тангажу и крену . Поступая на первый вход блока 6 компараторов, он сравнивается с сигналом  , поступающим на второй вход с задатчика 7 горизонтальной ориентации, где формируются сигналы, пропорциональные заданным значениям тангажа ϑЗ и крена γЗ аппарата. В том случае если разности и/или выходят за поле допуска, то на выходе блока 6 компараторов формируется сигнал, информирующий об отклонении аппарата от заданной ему горизонтальной ориентации.
, поступающим на второй вход с задатчика 7 горизонтальной ориентации, где формируются сигналы, пропорциональные заданным значениям тангажа ϑЗ и крена γЗ аппарата. В том случае если разности и/или выходят за поле допуска, то на выходе блока 6 компараторов формируется сигнал, информирующий об отклонении аппарата от заданной ему горизонтальной ориентации.
Датчик 3 абсолютного линейного ускорения аппарата по п.3 формулы (фиг.3) работает следующим образом. Сигнал, пропорциональный проекции VX продольной линейной скорости аппарата, с датчика 8 продольной линейной скорости поступает на первые входы дифференциатора 14-1 и умножителей 16-1, 16-2. Сигнал, пропорциональный проекции VY нормальной линейной скорости аппарата, с датчика 9 нормальной линейной скорости поступает на первые входы дифференциатора 14-2 и умножителей 16-3, 16-4. Сигнал, пропорциональный проекции VZ поперечной линейной скорости аппарата, с датчика 10 поперечной линейной скорости поступает на первые входы дифференциатора 14-3 и умножителей 16-5, 16-6. На вторые входы умножителей 16-1 и 16-2 поступает сигнал, пропорциональный угловой скорости ωZ по поперечной оси связанной системы координат с датчика 11 угловой скорости тангажа. На вторые входы умножителей 16-2 и 16-6 поступает сигнал, пропорциональный угловой скорости ωY по нормальной оси связанной системы координат с датчика 13 угловой скорости рыскания. На вторые входы умножителей 16-4 и 16-5 поступает сигнал, пропорциональный угловой скорости ωX по продольной оси связанной системы координат с датчика 12 угловой скорости крена. На первый суммирующий вход сумматора 15-1 поступает сигнал с выхода дифференциатора 14-1, на второй вычитающий вход - с выхода умножителя 16-3, на третий суммирующий вход - с выхода умножителя 16-6, а с выхода снимается сигнал, пропорциональный продольной составляющей WX абсолютного линейного ускорения аппарата. На первый суммирующий вход сумматора 15-2 поступает сигнал с выхода дифференциатора 14-2, на второй вычитающий вход - с выхода умножителя 16-5, на третий суммирующий вход - с выхода умножителя 16-1, а с выхода снимается сигнал, пропорциональный нормальной составляющей WY абсолютного линейного ускорения аппарата. На первый суммирующий вход сумматора 15-3 поступает сигнал с выхода дифференциатора 14-3, на второй вычитающий вход - с выхода умножителя 16-2, на третий суммирующий вход - с выхода умножителя 16-4, а с выхода снимается сигнал, пропорциональный поперечной составляющей WZ абсолютного линейного ускорения аппарата. Сигналы WX, WY, WZ, пропорциональные проекциям абсолютного линейного ускорения аппарата, поступают на вход блока 2 вычитания.
Датчик 8 продольной линейной скорости по п.4 формулы (фиг.4) выполнен в виде датчика 17 воздушной скорости по продольной оси связанной системы координат, причем его выходной сигнал, пропорциональный VX, используется также и для получения информации о нормальной VY и поперечной VZ линейной скорости аппарата, сообщаемой датчиком 9 нормальной линейной скорости и датчиком 10 поперечной линейной скорости устройства. При этом сигнал, пропорциональный углу α атаки, с датчика 18 угла атаки через функциональный преобразователь 19-1, формирующий сигнал sec α, поступает на первый вход умножителя 16-7. На второй вход умножителя 16-7 через функциональный преобразователь 19-2 поступает сигнал tgβ с датчика 20 угла скольжения β. Тогда на выходе умножителя 16-7 образуется сигнал, пропорциональный secα tgβ, который в умножителе 16-8 перемножается с выходным сигналом VX с датчика 17 воздушной скорости по продольной оси связанной системы координат. Выходной сигнал умножителя 16-8 пропорционален проекции VZ=VXsecα tgβ - поперечной линейной скорости аппарата. Аналогично сигнал, пропорциональный углу α атаки, с датчика 18 угла атаки через функциональный преобразователь 19-3, формирующий сигнал tgα, и инвертор 21 поступает на первый вход умножителя 16-9. На второй вход умножителя 16-9 поступает сигнал VX с выхода датчика 17 воздушной скорости по продольной оси связанной системы координат. В результате перемножения этих сигналов на выходе умножителя 16-9 получается сигнал VY=-VXtgα, пропорциональный нормальной линейной скорости аппарата.
Блок 4 определения составляющих ориентации по п.5 формулы (фиг.5) работает следующим образом. Сигнал на первый вход блока 4 определения составляющих ориентации, пропорциональный величине ускорения g силы тяжести, поступает на первый вход делителя схемы 22-1 деления, на второй вход делимого которой поступает сигнал со второго входа блока 4, пропорциональный разности ΔX продольных кажущегося aX и абсолютного WX линейных ускорений. В результате на выходе схемы 22-1 получается сигнал, пропорциональный ΔX/g. Пройдя через функциональный преобразователь 19-4, реализующий обратную тригонометрическую функцию arc sin, он образует на одном выходе блока 4 определения составляющих ориентации оценку угла тангажа  контролируемой горизонтальной ориентации аппарата. Сигнал на первый вход делителя, пропорциональный разности ΔY нормальных кажущегося aY и абсолютного WY линейных ускорений, и сигнал на второй вход делимого, пропорциональный разности ΔZ поперечных кажущегося aZ и абсолютного WZ линейных ускорений, схемы 22-2 деления поступают со второго входа блока 4 определения составляющих ориентации. В результате на выходе схемы 22-2 получается сигнал, пропорциональный - ΔZ/ΔY. Пройдя через функциональный преобразователь 19-5, реализующий обратную тригонометрическую функцию arc tg, он образует на другом выходе блока 4 определения составляющих ориентации оценку угла крена
контролируемой горизонтальной ориентации аппарата. Сигнал на первый вход делителя, пропорциональный разности ΔY нормальных кажущегося aY и абсолютного WY линейных ускорений, и сигнал на второй вход делимого, пропорциональный разности ΔZ поперечных кажущегося aZ и абсолютного WZ линейных ускорений, схемы 22-2 деления поступают со второго входа блока 4 определения составляющих ориентации. В результате на выходе схемы 22-2 получается сигнал, пропорциональный - ΔZ/ΔY. Пройдя через функциональный преобразователь 19-5, реализующий обратную тригонометрическую функцию arc tg, он образует на другом выходе блока 4 определения составляющих ориентации оценку угла крена  контролируемой горизонтальной ориентации аппарата.
контролируемой горизонтальной ориентации аппарата.
Блок 6 компараторов по п.6 формулы (фиг.6) работает следующим образом. Сигнал, пропорциональный оценке тангажа, поступает на один вход компаратора 23-1 с первого входа блока 6 компараторов. На другой вход компаратора 23-1 поступает сигнал, пропорциональный заданной горизонтальной ориентации по тангажу ϑЗ, со второго входа блока 6 компараторов. В том случае, если разность этих сигналов больше допустимого значения, компаратор 23-1 формирует выходной сигнал, который через схему 24 ИЛИ поступает на выход блока 6 компараторов. Сигнал, пропорциональный оценке крена, поступает на один вход компаратора 23-2 с первого входа блока 6 компараторов. На другой вход компаратора 23-2 поступает сигнал, пропорциональный заданной горизонтальной ориентации по крену γЗ, со второго входа блока 6 компараторов. В том случае, если разность этих сигналов больше допустимого значения, компаратор 23-2 формирует выходной сигнал, который через схему 24 ИЛИ также поступает на выход блока 6 компараторов. Появление сигнала на выходе блока 6 компараторов информирует о нарушении заданной горизонтальной ориентации аппарата.
Практическая реализация способа и устройства контроля горизонтальной ориентации аппарата возможна на аналоговой и цифровой схемотехнической базе. На малогабаритном дистанционно пилотируемом летательном аппарате, например, типа «Элерон» (ЗАО «Эникс» г.Казань), «Ласточка» (ОКБ СКБ «Топаз» г.Москва), ZALA 421-01 -04 (г.Москва) и др., в качестве гироскопических датчиков 11, 12, 13 угловых скоростей тангажа, крена, рыскания можно примененить микромеханические приборы типа МГК-01, МГДМ-01, МГВ-01 [10] или трехосный блок датчиков типа ДУС-ММГ [11]. Предпочтительно применять измерительные блоки высокой интеграции, включающие и микромеханические датчики 11, 12, 13 угловых скоростей тангажа, крена, рыскания, трехмерный векторный акселерометр 1 кажущихся ускорений по продольной aX, нормальной aY и поперечной aZ осям связанной системы координат, например, типа ИИБ-1-2 [12]. Еще большая степень интеграции возможна с применением системы, например, типа СИВПП-В, в которой измеряются и угловые скорости тангажа ωZ, крена ωX, рыскания ωY (датчики 11, 12, 13 угловых скоростей), и кажущиеся ускорения по продольной aX, нормальной aY, поперечной aZ осям (акселерометр 1), и углы атаки α, скольжения β (датчик 18 угла атаки, датчик 20 угла скольжения), и продольная VX, нормальная VY, поперечная VZ скорости (датчик 8 продольной линейной скорости, датчик 9 нормальной линейной скорости, датчик 10 поперечной линейной скорости) [13]. Для аэрометрической реализации измерения линейных скоростей аппарата может применяться и микро-СВС типа МВД-1, имеющую весьма малые весовые и габаритные характеристики [14]. Датчик 18 угла атаки и датчик 20 угла скольжения предпочтительно могут быть выполненны на малогабаритных безфлюгерных пневмомеханических ДАУ-П, термоанемометрических ДАУ-14И, ТДАУ, ионно-меточных ДАУ-17М измерителях [15]. Блок 2 вычитания, блок 4 определения составляющих ориентации, блок 6 компараторов, задатчик 5 величины ускорения силы тяжести, задатчик 7 горизонтальной ориентации, вычислительные операции в датчике 3 абсолютного линейного ускорения аппарата (фиг.3), датчике 9 нормальной линейной скорости и датчике 10 поперечной скорости (фиг.4) реализуются простыми алгоритмическими операциями БЦВМ аппарата, например, типа ЦВМ 80-30301, СБ-3580, КРЕДО-486 [16]. Для реализации устройства контроля горизонтальной ориентации, например, с командным авиагоризонтом АГБ-3К на вертолете МИ-8 в качестве датчика 8 продольной линейной скорости, датчика 9 нормальной линейной скорости и датчика 10 поперечной линейной скорости могут быть использованы выходные сигналы штатной радиотехнической доплеровской системы ДИСС-15 [17]. Для вертолета КА-50, КА-52 - это ДИСС-32. В качестве датчика 11 угловой скорости тангажа, датчика 12 угловой скорости крена, датчика 13 угловой скорости рыскания могут быть использованы гироДУСы типа 1209, а для трехмерного векторного акселерометра 1 - датчики МП-95 от штатных автопилота АП-34Б и БУР-1-2. Датчики 8, 9, 10 могут быть реализованы и на спутниковой навигационной системе типа К-161, СНС-2, СН-3704 (3715), AT-1304 (1305). Вычислительные операции здесь также возможны на БЦВМ типа ЦВМ 80÷90. При этом отпадает необходимость в установке на борт вертолета сравнительно крупногабаритного ненадежного блока сравнения и предельного крена БСПК. В микросхемном аналоговом исполнении устройство контроля горизонтальной ориентации строится так, что умножители 16-1, 16-2, 16-3, 16-4, 16-5, 16-6, 16-7, 16-8, 16-9 выполнены на микросхеме К525ПС2 [18, с.321], делители 23-1, 23-2 - на микросхемах К525ПС1 и К140УД7 [18, с.322], сумматоры 15-1, 15-2, 15-3, дифференциаторы 14-1, 14-2, 14-3, блок 2 вычитания и инвертор 21 - на операционном усилителе К140 УД8 [18, с.286], компараторы 23-1, 23-2 - на микросхеме 521СА1 или К554 CA1 [18, с.310], функциональные преобразователи 19-1, 19-2, 19-3,19-4, 19-5 - на активных диодных функциональных преобразователях [19, с.116], схема ИЛИ - на микросхеме К564ЛЕ5 [18, с.145].
Повышенная точность контроля горизонтальной ориентации заявляемым способом и устройством зависит от порогов чувствительности измерителей - акселерометра и датчика абсолютного линейного ускорения аппарата. Ее наибольшее значение составляет 0,21 угл. сек по порогу акселерометра, например, типа A-15 [8,c.131], или 1÷7 угл. мин по порогу определения ускорений с помощью спутниковой навигационной системы СНС [3, с.118; 6, с.111]. Это много лучше (15÷20 угл. мин),чем у классических гировертикалей АГБ, МГВ-1, МГВ-4. Контроль положения аппарата может осуществляться с более высокой точностью, чем в устройствах БСПК, БКК, где порог срабатывания компараторов отказа составляет 7±2 угл. град, но для двух или трех гировертикалей [20, с.38]. Реализация датчика абсолютного линейного ускорения аппарата с помощью датчика воздушной скорости по продольной оси связанной системы координат МВД-1 и датчиков углов атаки и скольжения дает наихудшую точность контроля 2,8 угл. град (ветер ±1 м/с, скорость 120 м/с) [8, с.112]. Это значительно хуже, чем в варианте СНС, однако имеет место наибольшая автономность и надежность контроля ориентации для малоразмерного аппарата. Так среднее время наработки на отказ, определяемое надежностью ЦВМ 80, ИИБ, МВД-1, здесь составляет 6200 ч, что для среднего полетного времени 2 часа обеспечивает надежность контроля горизонтальной ориентации Р=0,9997. При реализации способа и устройства на СНС аналогичные показатели равны: 666÷2000 ч, Р=0,997÷0,999 [6, с.111]. Эти значения соизмеримы с надежностью 3000 часов классических гировертикалей АГБ-3К, МГВ-1, МГВ-4. Значительный положительный эффект для заявляемого способа и устройства в безызбыточной комплектации датчиков получается при сравнении по весу - меньше в 3,5; 3,6; 1,2 раза; по габаритам - меньше в 3; 6,1; 1,9 раза; по энергопотреблению - меньше в 14,7; 11; 13,6 раза, чем у названных АГБ-3К, МГВ-1, МГВ-4 [8, с.119]. Полученный положительный эффект по точности, весу, габаритам, энергопотреблению при высокой надежности работы, а также широким функциональным возможностям системы имеет особое значение для малогабаритных дистанционно пилотируемых аппаратов. Все датчики системы входят в типовой состав приборного оборудования любого современного самолета. С учетом современной микромеханической реализации акселерометров и датчиков угловых скоростей заявляемое устройство конструктивно может быть создано на плате СНС. Это расширяет ее функциональные возможности не только как навигационной системы, но и как системы угловой ориентации аппарата, на котором она применяется. Система определяет все пилотажные и навигационные параметры полета без механических роторно-карданных гироскопических измерителей или дополнительных антенных конструкций [23, с.119] на аппарате. Программная реализация способа и устройства включает простейшие, безынерционные арифметические операции без интегрирования измерительной информации, что значительно проще и надежнее известных алгоритмов работы серийных бесплатформенных систем с кватернионами [21, с.314-316] и может применяться как контрольное соотношение [22, с.105] для обнаружения сбоев в работе основной сложной гироинерциальной системы ориентации самолета. С физической точки зрения заявляемый способ и устройство представляют попытку создания невозмущаемого ускорениями активных сил, действующих на аппарат, математического маятника в широком динамическом диапазоне измерений датчиком абсолютного линейного ускорения на СНС [23, с.73, 119, 131]. Несомненный практический интерес имеет и реализация комплексной системы контроля горизонтальной ориентации повышенной надежности, одновременно включающая аэрометрический и радиотехнический варианты измерения абсолютного линейного ускорения аппарата [24, с.32].
Таким образом, приведенные сведения показывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее изобретение при его осуществлении, предназначено для использования в области комплексного контроля горизонтальной ориентации малогабаритного дистанционно пилотируемого летательного аппарата или основной сложной гироинерциальной пилотажно-навигационной системы по крену и тангажу, а именно в устройстве для контроля горизонтальной ориентации аппарата;
- для заявленного изобретения в том виде, как оно охарактерезовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Ишлинский А.Ю. Механика относительного движения и силы инерции. М.: Наука, 1981. 191 с.
2. Физический энциклопедический словарь.- М.: Советская энциклопедия, 1984, 944 с.
3. Тызьба A.M., Леви Ю.В., Ермолина М.А. Структура интегрированных систем на базе бесплатформенных инерцивальных систем средней точности. // Интегрированные инерциально-спутниковые системы навигации. СПб.: РФЦНИИ «Электроприбор», 2004.
4. Селезнев В.П.Навигационные устройства. М. Машиностроение, 1974,600 с.
5. Боднер В. А. Системы управления летательными аппаратами. - М.: Машиностроение. 1973, 506 с.
6. Глобальная спутниковая радионавигационная система ГЛОНАСС. / Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. М.: ИПРЖР, 1998. 400 с.
7. Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. - М.: Транспорт, 1987, с.191.
8. Авионика России. Энциклопедический справочник. / Под ред. С.Д.Бодрунова. СПб.: Национальная Ассоциация авиаприборостроителей, 1999, 780 с.
9. Бородин В.Т., Рыльский Г.И. Пилотажные комплексы и системы управления самолетов и вертолетов. - М.: Машиностроение, 1978. 216 с.
10. Микромеханические гироскопы. // Аэрокосмическое приборостроение. 2006. №1.
11. Трехосный микромеханический измеритель параметров движения ИПД-ММ. Проспект фирмы «Российский приборостроительный альянс», МАКС, г.Москва.
12. Инерциальный измерительный блок ИИБ-1-2. Проспект фирмы «Пермская научно-производственная приборостроительная компания», МАКС, г.Москва.
13. Система измерения воздушных параметров полета вертолета СИВПП-В. Проспект фирмы «Авиаприбор-Восход» МАКС, г.Москва.
14. Модуль воздушных данных МВД-1 (Микро-СВС). Проспект фирмы «Авиаприбор» МАКС, г.Москва.
15. Солдаткин В.М. Методы и средства измерения аэродинамических углов летательных аппаратов. Изд-во Казан, гос. техн. ун-та. Казань, 2001. 448 с.
16. Авиация ПВО России и научно-технический прогресс: боевые комплексы и системы вчера, сегодня, завтра. / Под ред. Е.А.Федосова. М.: Дрофа, 2004.
17. Перескоков А.Н. Приборное оборудование вертолетов МИ-8 (Т, МТ, МТВ, АМТ). СПб.: Академия ГА. 2003. 98 с.
18. Аналоговые и цифровые интегральные микросхемы: Справочное пособие. / С.В.Якубовский, Н.А.Барканов, Л.И.Ниссельсон и др. / Под ред. С.В.Якубовского. М.: Радио и связь,1984 г., с.432.
19. Смолов В.Б. Функциональные преобразователи информации. Л.: Энергоиздат, 1981. с.248.
20. Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая реализация. М.: Машиностроение, 1991. 160 с.
21. Помыкаев И.И., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. М.: Машиностроение, 1983. 456 с.
22. Матов В.И., Белоусов Ю.А., Федосеев Е.П. Бортовые цифровые вычислительные машины и системы. М.: Машиностроение, 1988. 216 с.
23. Бортовые устройства спутниковой радионавигации. / И.В.Кудрявцев, И.Н.Мищенко, А.И.Волынкин и др. Под ред. В.С.Шебшаевича. М. транспорт, 1988. 201 с.
24. Авиационная радионавигация: Справочник. / А.А.Сосновский, И.А.Хаймович, Э.А.Лутин, И.Б.Максимов; Под ред. А.А.Сосновского. М.: Транспорт, 1990. 264 с.
Изобретение относится к области комплексного полетного контроля систем автоматического управления летательными аппаратами. Способ основан на измерении величины и направления кажущегося и абсолютного линейного ускорения, вычислениях их разностей, отношений разностей, в том числе к величине ускорения силы тяжести, и обратных тригонометрических функций оценок тангажа и крена. Последующее сравнение этих оценок с заданными значениями позволяет контролировать ориентацию аппарата. Устройство содержит векторный акселерометр, блок вычитания, векторный датчик абсолютного линейного ускорения, задатчик величины ускорения силы тяжести, блок определения составляющих ориентации и блок компараторов. Техническим результатом является создание аппаратурно безызбыточных систем автоматического управления и контроля, повышение точности, надежности и достоверности контроля. 2 с. и 4 з.п. ф-лы, 6 ил.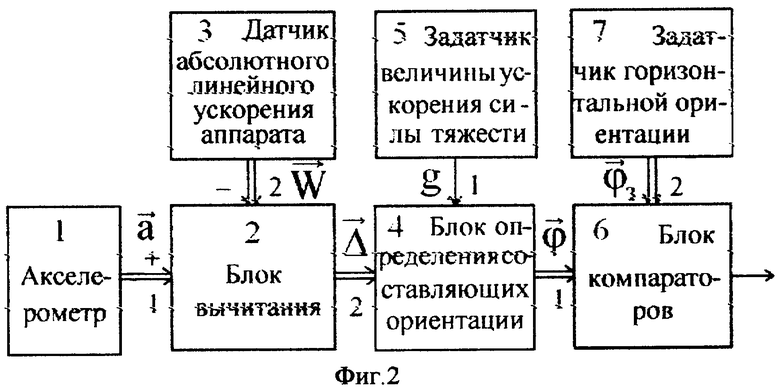
1. Способ контроля горизонтальной ориентации аппарата, основанный на измерении величины и направления кажущегося линейного ускорения, отличающийся тем, что одновременно измеряют текущие величину и направление абсолютного и кажущегося линейного ускорения аппарата, определяют величину и направление разности кажущегося и абсолютного линейного ускорения аппарата, а затем - отношение проекции разности кажущегося и абсолютного линейного ускорения аппарата на продольную ось связанной системы координат к величине ускорения силы тяжести и отношение проекции разности кажущегося и абсолютного линейного ускорения на поперечную ось связанной системы координат к проекции разности кажущегося и абсолютного линейного ускорения на нормальную ось связанной системы координат, после чего определяют контролируемую горизонтальную ориентацию аппарата согласно соотношениям:
где  ,
,  - оценки тангажа, крена контролируемой горизонтальной ориентации аппарата, угл. град;
- оценки тангажа, крена контролируемой горизонтальной ориентации аппарата, угл. град;
ΔX, ΔY, ΔZ - проекции величины и направления разности кажущегося и абсолютного линейного ускорения аппарата на продольную, нормальную и поперечную оси связанной системы координат, м/с2;
g - величина ускорения силы тяжести в точке местоположения аппарата, м/с2, и сравнивают ее с заданными значениями.
2. Устройство для контроля горизонтальной ориентации аппарата, содержащее последовательно соединенные акселерометр и блок вычитания, отличающееся тем, что устройство дополнительно содержит датчик абсолютного линейного ускорения аппарата, выход которого соединен со вторым вычитающим входом блока вычитания, а также последовательно соединенные задатчик величины ускорения силы тяжести, блок определения составляющих ориентации, второй вход которого соединен с выходом блока вычитания, и блок компараторов, вторым входом соединенный с задатчиком горизонтальной ориентации аппарата.
3. Устройство для контроля горизонтальной ориентации аппарата по п.2, отличающееся тем, что датчик абсолютного линейного ускорения аппарата содержит датчики продольной, нормальной и поперечной линейной скорости аппарата, датчики угловой скорости тангажа, крена, рыскания аппарата, три дифференциатора, три сумматора, шесть умножителей так, что первые входы первого дифференциатора, первого и второго умножителей соединены с датчиком продольной линейной скорости аппарата, первые входы второго дифференциатора, третьего и четвертого умножителей соединены с датчиком нормальной линейной скорости аппарата, первые входы третьего дифференциатора, пятого и шестого умножителей соединены с датчиком поперечной линейной скорости аппарата, вторые входы первого и третьего умножителей соединены с выходом датчика угловой скорости тангажа, вторые входы второго и шестого умножителей соединены с выходом датчика угловой скорости рыскания, вторые входы четвертого и пятого умножителей соединены с выходом датчика угловой скорости крена, первый суммирующий вход первого сумматора соединен с выходом первого дифференциатора, второй вычитающий вход - с выходом третьего умножителя, третий суммирующий вход - с выходом шестого умножителя, а выход - с выходом продольной составляющей абсолютного линейного ускорения аппарата, первый суммирующий вход второго сумматора соединен с выходом второго дифференциатора, второй вычитающий вход - с выходом пятого умножителя, третий суммирующий вход - с выходом первого умножителя, а выход - с выходом нормальной составляющей абсолютного линейного ускорения аппарата, первый суммирующий вход третьего сумматора соединен с выходом третьего дифференциатора, второй вычитающий вход - с выходом второго умножителя, третий суммирующий вход - с выходом четвертого умножителя, а выход - с выходом поперечной составляющей абсолютного линейного ускорения аппарата.
4. Устройство для контроля горизонтальной ориентации аппарата по п.3, отличающееся тем, что датчик продольной линейной скорости аппарата выполнен в виде датчика воздушной скорости по продольной оси связанной системы координат, а устройство дополнительно содержит последовательно соединенные датчик угла атаки, первый функциональный преобразователь, седьмой умножитель, второй вход которого, через второй функциональный преобразователь, соединен с выходом датчика угла скольжения, восьмой умножитель, второй вход которого соединен с выходом датчика воздушной скорости по продольной оси связанной системы координат, а выход образует поперечную линейную скорость аппарата, последовательно соединенные датчик угла атаки, третий функциональный преобразователь инвертор, девятый умножитель, второй вход которого соединен с выходом датчика воздушной скорости по продольной оси связанной системы координат, а выход образует нормальную линейную скорость аппарата.
5. Устройство для контроля горизонтальной ориентации аппарата по п.2, отличающееся тем, что блок определения составляющих ориентации содержит первую, вторую схемы деления, четвертый, пятый функциональный преобразователи так, что первый вход блока определения составляющих ориентации соединен с первым входом делителя первой схемы деления, второй вход делимого которой соединен с входом разности продольных кажущегося и абсолютного линейных ускорений на втором входе блока определения составляющих ориентации, выход первой схемы деления, через четвертый функциональный преобразователь, соединен с выходом оценки тангажа контролируемой горизонтальной ориентации аппарата, первый вход делителя второй схемы деления соединен с входом разности нормальных кажущегося и абсолютного линейных ускорений, второй вход делимого - с входом разности поперечных кажущегося и абсолютного линейных ускорений на втором входе блока определения составляющих ориентации, выход второй схемы деления, через пятый функциональный преобразователь, соединен с выходом оценки крена контролируемой горизонтальной ориентации аппарата.
6. Устройство для контроля горизонтальной ориентации аппарата по п.2, отличающееся тем, что блок компараторов содержит первый, второй компараторы и схему ИЛИ, первый вход которой соединен с выходом первого компаратора, один вход которого соединен с первым входом блока компараторов оценки тангажа, а другой вход со вторым входом блока компараторов заданной горизонтальной ориентации по тангажу, второй вход схемы ИЛИ соединен с выходом второго компаратора, один вход которого соединен с первым входом блока компараторов оценки крена, другой вход со вторым входом блока компараторов заданной горизонтальной ориентации по крену, выход схемы ИЛИ является выходом устройства контроля горизонтальной ориентации.
| СЕЛЕЗНЕВ В.П | |||
| Навигационные устройства | |||
| - М.: Машиностроение, 1974, с.152-158, 205, 210, 366 | |||
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |
| ОЦЕНКА ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НАКЛОНЯЮЩЕГОСЯ ТЕЛА С ИСПОЛЬЗОВАНИЕМ МОДИФИЦИРОВАННОГО КВАТЕРНИОННОГО ПРЕДСТАВЛЕНИЯ ДАННЫХ | 2001 |
|
RU2253092C2 |
| JP 8271279 А, 18.10.1996 | |||
| JP 6195125 А, 15.07.1994. | |||

