Изобретение относится к измерительной технике, в частности к измерению ускорения вдоль трех координатных осей относительно инерциального пространства приборами со свободным от механических связей с корпусом чувствительным элементом, и может быть использовано в системах управления возвращаемых на Землю космических аппаратов.
Известен электростатический акселерометр 1, состоящий из кожуха с расположенным в нем инерционным элементом ИЗ в виде шара, системы электродов, которые образуют электростатический подвес, схемы определения положения шара, схемы контроля положеня шара, днух блоков компенсации переменной составляющей потенциала чувствительного элемента, блока компенсации постоянной составляющей потенциала шара, вычислительной схемы и блока индикации.
Недостатком указанного акселерометра является трудность реализации управления ИЗ в моменты его приведения в центр зонгы измерений при ускорениях, больших д. В этом случае для обеспечения приведения ИЗ необходимо увеличивать управляющие напряжения на электродах подвеса (датчиках силы), что может привести в конечном итоге к электрическому пробою и выводу акселерометра из строя.
С другой стороны, можно добиться повышения управляющих моментов датчика силы уменьшением зазоров между электроXI
О
g
О
дами датчика силы и ИЭ. Уменьшение зазоров увеличит управляющие моменты датчика силы. Однако уменьшение зазоров приводит к увеличению сил электрического тяжения, что не позволит иметь порог чувствительности на уровне 10 д.
Исходя из вышесказанного, в указанном акселерометре ограничивают диапазон измеряемых ускорений Ю 9 - 10 д, выбирают зазор равным 80 мкм при диаметре незаряженной ИЭ 10 мм, напряженно приведения на электродах электрост атическог о подвеса до 150 В.
Наиболее близким по своей технической сущности является инерциальный эта- лонный прибор с циклически удерживаемым надежным чувствительным элементом, описанный о 2.
Инерциальный эталонный прибор с циклически (динамически) удерживаемым надежным чувствительным элементом содержит корпус со встроенной вакуумной ка- мерой, в которых по трем взаимно перпендикулярным направлениям выполнены три окна, шесть плоских электродов на внутренних сторонах камеры в виде кубической решетки, заряженную инерционную массу в камере с возможностью перемещения относительно камеры, источник электромагнитного излучения, расположенный с внешней стороны камеры с лучом, направленным на расщепитель, трехосное зеркало, расположенное между камерой и расщепителем по линии распространения луча, направляющее луч на инерционную массу по трем ортогональным осям, проходящим через центр камеры, три детектора электромагнитного излучения с внешней стороны камеры и три оптических датчика положения по одному на каждую измерительную ось, расположенные с внешней стороны корпуса на линиях распространения луча, источник питания, компьютер, электронный переключатель, три электронных блока.
Недостатком эталонного прибора является принципиальная невозможность измерения малых ускорений в диапазоне 10-10 g за счет наличия сипы электростатического тяжения между заряженной инерционной массой и внутренней поверхностью кубической решетки.
Таким образом, электростатический акселерометр 1 обеспечивает измерение усv5
корения в диапазоне 10 - 10 g, a эталонный прибор 2 - в диапазоне от до десятков д.
Целью изобретения является расширение диапазона измеряемых ускорений за счет обеспечения изменения режима работы устройства путем заряда и разряда инерционной массы, обладающей электретными свойствами.
Цель достигается тем, что в устройство
для измерения ускорения, содержащее корпус со встроенной вакуумной камерой, в которых по трем взаимно перпендикулярным направлениям выполнены три оптических окна, шесть плоских электродов на внутрен0 них стенках камеры в виде кубической решетки, расположенную внутри камеры сферическую инерционную массу, а также расположенные снаружи корпуса вычислительный блок, источник питания, соединен5 ный с силовым входом электронного переключателя, и источник электромагнитного излучения, оптически связанный через расщепитель и трехосное зеркало с тремя измерительными каналами, оси которых
0 расположены взаимно пенпендикуляр но и пересекаются в точке, совпадающей с центром инерционной массы и вакуумной камеры, причем каждый из каналов содержит оптический датчик положения инерционной
5 массы, сопряженный с детектором электромагнитного излучения, подключенным через электронный блок к вычислительному блоку и электронному переключателю, выходы которого подключены к соответствую0 щим электродам, а каждый из датчиков положения инерционной массы выполнен в виде интерферометра Майкельсона и содержит полупрозрачное и отражательное зеркала и конденсорную линзу, введены
5 индукторы, расположенные попарно с диаметрально противоположных сторон инерционной массы между ней и каждым из электродов, второй электронный переключатель, источник переменного тока. Причем
0 индукторы изолированы от корпуса и электродов и подключены к выходу второго электронного переключателя, силовой вход которого подключен к выходу источника переменного тока, а управляющий вход - к
5 выходу вычислительного блока, информационный вход которого соединен с интерфейсом системы управления.
Сравнение заявляемого устройства для измерения ускорения с прототипом указы0 вает на введение дополнительных признаков: индукторов, второго электронного переключателя, источника переменного то- ка и связей между ними, что позволяет установить соответствие его критерию
5 новизна.
Сравнение введенных признаков с прототипом показывает, что отдельно они известны. Однако в технической и патентной литературе не выявлена их полная совокупность, поэтому они обеспечивают заявлявмому устройству соответствие критерию существенные отличия.
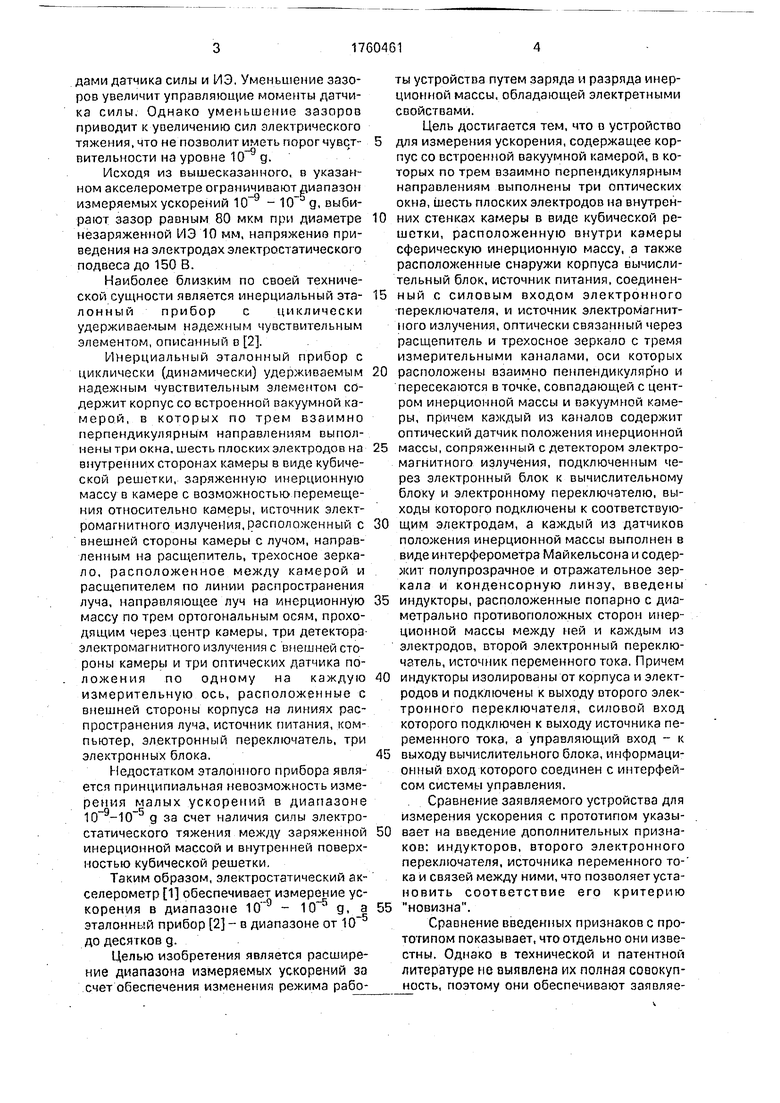
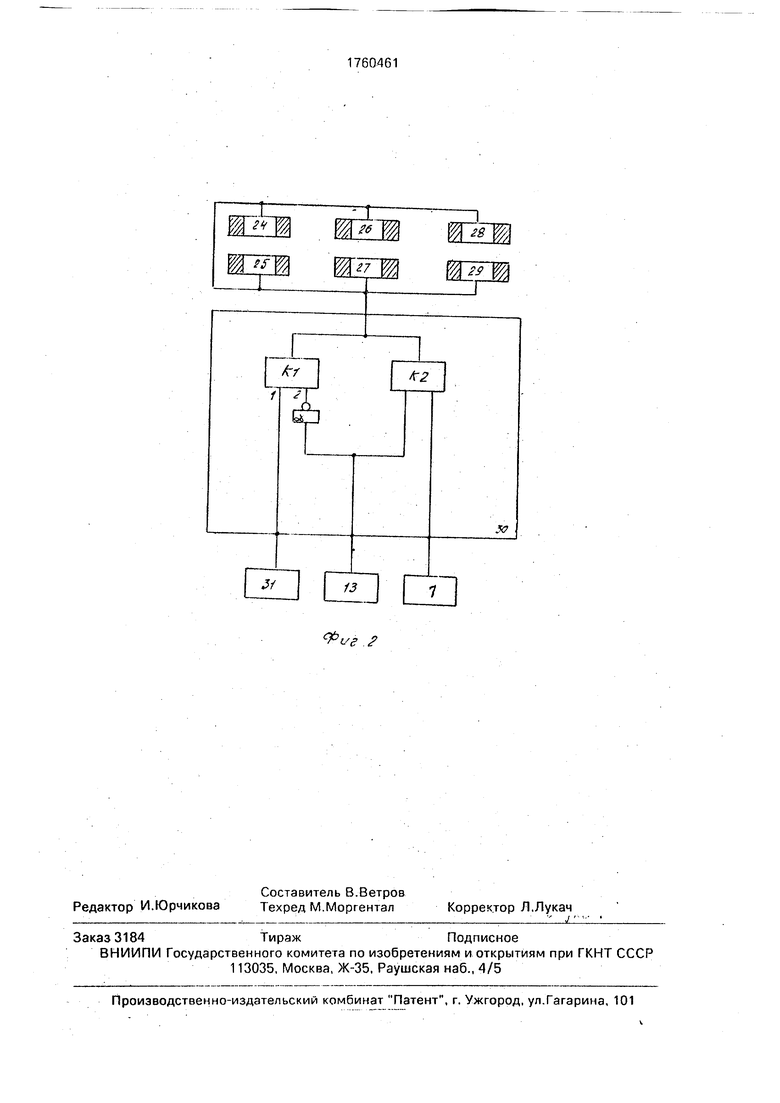
На фиг. 1 представлены конструкция акселерометра и электронные устройства; на фиг. 2 представлена схема введенного электронного переключателя. При этом на фиг. 1 изображены элементы акселерометра для измерения перемещения инерционной массы по двум осям, параллельным плоскости листа. Элементы устройства, расположенные по третьей оси, не представлены.
Устройство для измерения ускорения, изображенное на фиг. 1, содержит корпус 1 со встроенной вакуумной камерой 2. в которых по трем взаимно перпендикулярным направлениям выполнены оптические окна 3, 4, 5, шесть плоских электродов 6, 7, 8, 9, 10,11, на внутренних стенках камеры в виде кубической решетки, расположенную внутри камеры 2 сферическую инерционную массу 12, а также расположенные снаружи корпуса 1 вычислительный блок 13, источник 14 питания, соединенный с силовым входом электронного переключателя 15, и источник 16 электромагнитного излучения, оптически связанный через расщепитель 17 и трехосное зеркало 18 с тремя измерительными каналами, оси которых расположены взаимно перпендикулярно и пересекаются в точке, совпадающей с центром инерционной массы 12 и вакуумной камеры 2. Каждый из каналов содержит оптический датчик положения инерционной массы 12, сопряженный с соответствующим детектором 19 электромагнитного излучения, который подключен через соответствующий электронный блок 20 к вычислительному блоку 13 и электронному переключателю 15, выходы которого подключены к соответствующим электродам 6-11, а каждый из датчиков положения инерционной массы выполнен в виде интерферометра Майкельсона и содержит полупрозрачное 21 и отражательное 22 зеркала и конденсорную линзу23. Индукторы 24, 25, 26, 27, 28, 29 расположены попарно с диаметрально противоположных сторон инерционной массы 12 между ней и каждым из электродов 6-11. Второй электронный переключатель 30 и источник 31 переменного тока расположены снаружи корпуса 1 устройства. Индукторы 24-29 изолированы от корпуса 1 и электродов 6-11 и подключены к выходу второго электронного переключателя 30, силовой вход которого подключен к выходу источника 31 переменного тока, а управляющий вход к выходу вычислительного блока 13, информационный вход которого соединен с интерфейсом системы управления (СУ).
Устройство для измерения ускорения работает следующим образом.
В исходном положении подано напряжение на электронные блоки 20, вычисли- тельный блок 13, через открытый переключатель 15 на электроды 6-11 подано питание с источника 14. За счет электростатических сил заряженная инерционная масса 12 удерживается в цептре зоны 32 измерения. Переключатель 30 закрыт и на индукторы 24-29 не подан ток высокой частоты с источника 31 переменного тока, работает лазер. В электронных блоках 20 элементы памяти обнулены.
Предлагаемое устройство обеспечивает измерение ускорения в различных условиях применения за счет изменения режима работы.
При этом под условиями применения
понимается нахождение возвращаемого на Землю космического аппарата в трех режимах функционирования:выведения на орбиту искусственного спутника Земли (ИСЗ); движения по орбите ИСЗ или в космическом
пространстве; возвращения на Землю.
В предлагаемом устройстве заряженная инерционная масса 12 используется в первом и третьем режимах функционирования, а не заряженная - во втором. Команды
на изменение режимов функционирования поступают из СУ космического аппарата в вычислительный блок 13.
Рассмотрим работу устройства в первом режиме функционирования.
По команде с вычислительного блока 13 через электронные блоки 20, электронный переключатель 15 снимается удерживающее напряжение с электродов 6-11 электро- статического подвеса, которые
электрическим путем соединяются с корпус сом 1. Инерционная масса 12 поддействием сил инерции начинает перемещаться в пределах области 32 удержания. С помощью оптических датчиков положения, детекторов 19 и электронных блоков 20 измеряется перемещение инерционной массы 12 путем подсчета интервалов времени ц и т.2 прохождения инерционной массой эталонных расстояний Si и S2 по каждой измерительной
оси. Ускорения по каждой измерительной оси вычисляются по формуле
Wj
t2i
tli t2i (til 4-t2i )
где i 1, 2, 3 - номера измерительных осей; 55A - длина волны лазерного излучателя
16;
Ni N2 512 - число интерферационных полос (импульсов), заджающих эталонные расстояния Si 82.
При выходе инерционной массы 12 из границ области 32 удержания вычислительный блок 13 формирует команду управления на приведение инерционной массы в центр области удержания. По этой команде через блоки 20, электронный переключатель 15 электроды 6-11 электрически изолируются от корпуса и на них подается напряжение с источника 14. Под действием электростатических сил тяжения инерционная масса 12 приводится в центр области 32 удержания. Циклы работы устройства повторяются. Вычисленное значение ускорения Wi с выхода вычислительного блока 13 поступает в интерфейс системы ускорения, где по значению Wi принимается решение на изменение режима работы устройства для измерения ускорения.
При поступлении команды из СУ летательного объекта осуществляется переход на второй режим функционирования -измерение ускорений объекта в диапазоне - . Вычислительный блок 13 через блоки 20 формируют управляющий сигнал на переключатель 15, который электрически изолирует электроды 6-11 от корпуса и подает на них напряжение источника 14. Инерционная масса приводится в центр области 32 удержания и удерживается. Вычислительный блок 1.3 через блоки 20, переключатель 15 снимает напряжение е электродов 6-11 и через переключатель 30 обеспечивает подачу на индукторы тока высокой частоты от источника 31. Индукторы 24-29 обеспечивают нагрев инерционной массы 12. Нагрев инерционной массы, которая обладает электронными свойствами, обеспечивается методом индукционной плавки металлов во взвешенном состоянии с целью снятия заряда с инерционной массы при ее остывании в отсутствии электро-, статического поля.
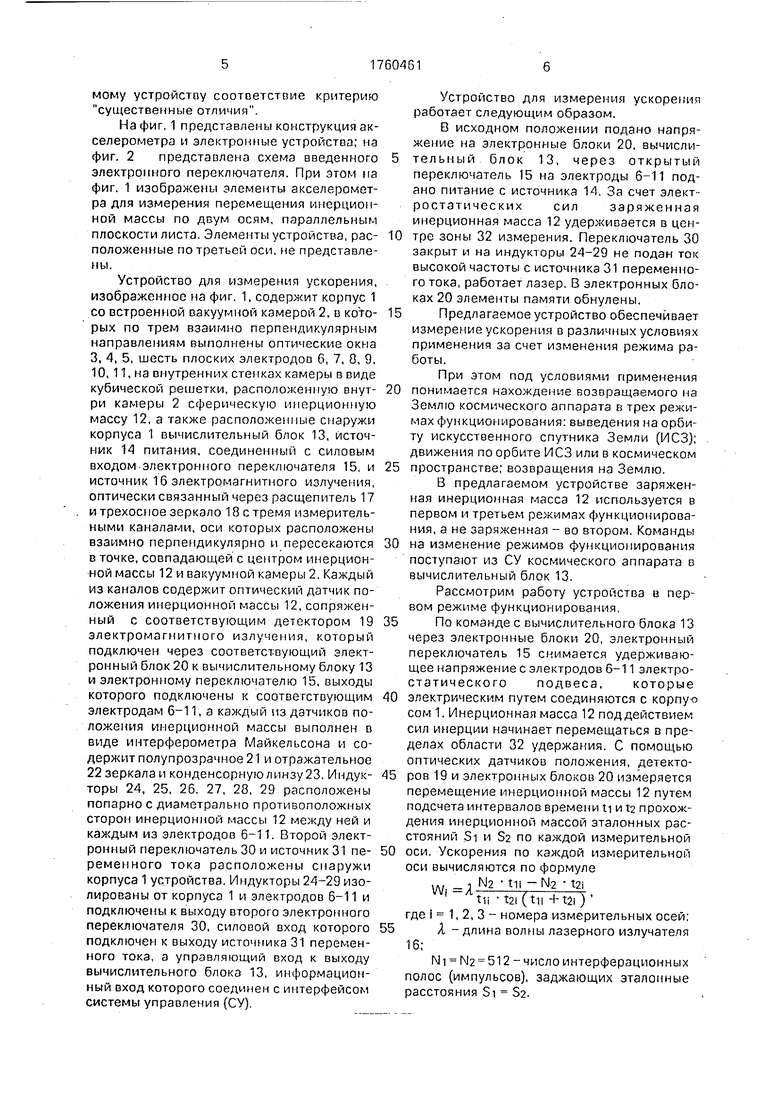
Схема переключателя 30 представлена на фиг. 2 и включает элемент И-НЕ, токовые ключи К1. К2. Логический О с вычислительного блока 13 инвертируется и открывает ключ К1. Ток высокой частоты с источника 31 подается через ключ на индукторы. Проходя по обмоткам индукторов, он наводит вихревые токи Фуко на поверхности инерционной массы, что обеспечивает ее нагрев. Затем сигнал в виде О снимается и ключ К1 закрывается. Компьютер формирует сигнал в виде логической 1, по которой открывается К2 и индукторы через открытый ключ К2 соединяются с корпусом устройства. Тем самым заканчивается цикл снятия заряда с инерционной массы, которая опять по команде с компьютера приводится в центр зоны измерения, отпускается, измеряется
ее перемещение и т.д. Повторяются циклы приведений и вычислений ускорения инерционной массы 12.
При поступлении следующей команды
из СУ космического аппарата в вычислительный блок 13 осуществляется переход на третий режим функционирования. Повторяются операции приведения инерционной массы в центр области измерения, силового
0 удержания и т.д. Отличие третьего режима от второго заключается в том, что инерционная масса в третьем режиме функционирования нагревается и остывает в электростатическом поле, что обеспечивает
5 ее заряд. Далее повторяются циклы приведения и вычисления ускорения инерционной массы. При переходе с первого режима на второй блок 13 измеряет (увеличивает) время опроса электронных блоков, при пе0 реходе с второго режима на третий восстанавливает (уменьшает) время опроса. Формула изобретения Устройство для измерения ускорения, содержащее корпус с встроенной вакуум5 ной камерой, в которых по трем взаимно перпендикулярным направлениям выполнены три оптических окна, шесть плоских электродов на внутренних стенках камеры в виде кубической решетки, расположенную
0 внутри камеры сферическую инерционную массу, а также расположенные снаружи корпуса вычислительный блок, источник питания, соединенный с силовым входом электронного переключателя, и источник
5 электромагнитного излучения, оптически связанный через расщепитель и трехосное зеркало с тремя измерительными каналами, оси которых расположены взаимно перпендикулярно и пересекаются в точке, совпада0 ющей с центром инерционной массы и вакуумной камеры, каждый из каналов содержит оптический датчик положения инерционной массы, сопряженный с детектором электромагнитного излучения, подключен5 ным через электронный блок к вычислительному блоку и электронному переключателю, выходы которого подключены к соответствующим электродам, а каждый из датчиков положения инерционной массы выполнен в
0 виде интерферометра Майкельсона и содержит полупрозрачное и отражательное зеркала и конденсорную линзу, отличающееся тем, что, с целью расширения диапазона измерений за счет обеспечения изменения
5 режима работы устройства, в него введены индукторы, расположенные попарно с диаметрально противоположных сторон инерционной массы между ней и каждым из электродом, второй электронный переключатель, источник переменного тока, причем
инд/кторы изолированы от корпуса и электродов и подключены к выходу второго электронного переключателя, силовой вход которого подключен к выходу источника переменного тока, з управляющий вход к выходу вычислительного блока, информационный вход которого соединен с интерфейсом системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехосный электростатический акселерометр | 1984 |
|
SU1346058A3 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781617A1 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1788470A1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
| СПОСОБ ИНЕРЦИАЛЬНОГО АВТОСОПРОВОЖДЕНИЯ ЗАДАННОГО ОБЪЕКТА ВИЗИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2498193C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ПРИНИМАЕМЫХ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ОБЛУЧАЕМОГО ОБЪЕКТА ВИЗИРОВАНИЯ, С ОДНОВРЕМЕННЫМ ЕГО ИНЕРЦИАЛЬНЫМ ПЕЛЕНГОВАНИЕМ И ИНЕРЦИАЛЬНЫМ АВТОСОПРОВОЖДЕНИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526790C2 |
| Устройство и способ измерения ускорения на оптическом разряде электродным и теневым методом | 2022 |
|
RU2781363C1 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781618A1 |
| Система измерения трёхмерного линейного и углового ускорения и перемещения объекта в пространстве с использованием волоконных брэгговских решеток | 2019 |
|
RU2716867C1 |
| Устройство и способ измерения ускорения на оптическом разряде теневым методом | 2022 |
|
RU2781747C1 |
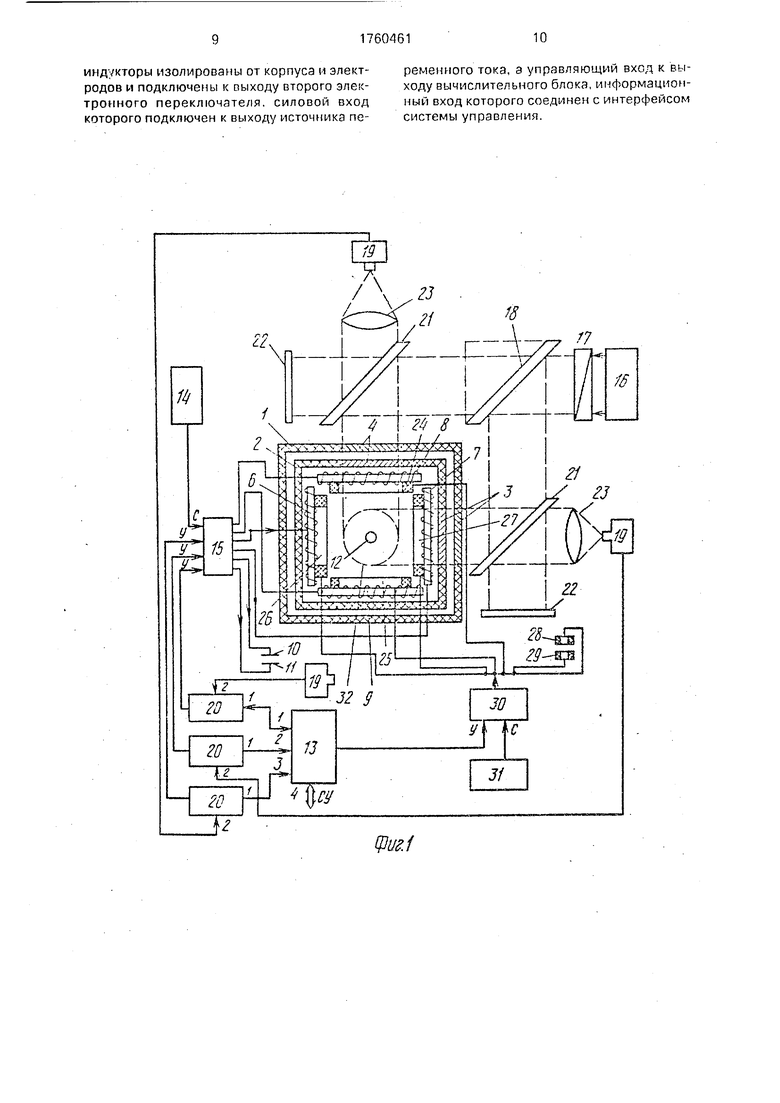
Использование: приборостроение, приборы инерционной навигации, акселерометры. Сущность изобретения: трехкомпонентный акселерометр содержит корпус 1 со встроенной в него вакуумной камерой 2 с оптическими окнами 3, 4, 5 по трем направлениям. Внутри камеры 2 расположена сферическая масса 12. На внутренних стенках камеры расположены в виде кубической решетки шесть плоских электродов 6-11. Снаружи корпуса 1 расположены источник 16 излучения и трехосное зеркало 18стремя взаимно перпендикулярными оптическими каналами, оси которых пересекаются в центре инерционной массы 12, В каждом оптическом канале установлен датчик перемещения в виде интерферометра Майкельсона, сопряженный с детектором 19электромагнитного излучения. Выход каждого детектора 19 через соответствующий электронный блок 20 соединен с вычислительным блоком 13 и с электронным переключателем 15, соединенным с соответствующим электродом 6-11. Второй электронный переключатель 30 связан с вычислительным блоком 13 и подключен к индукторам 24-29, расположенным внутри камеры 2. 2 ил. (Л С
tf
i
i
f S
13
J
о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ТЕПЛООБМЕННОЕ УСТРОЙСТВО ТЕПЛОВЫХ АГРЕГАТОВ С ТРУБЧАТЫМИ ЭЛЕМЕНТАМИ | 2012 |
|
RU2495328C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4384487, кл.С01 Р 15/08, 1983. | |||
